|
|
|
| Design of exoskeleton for functional rehabilitation of fingers driven by shape memory alloy |
Yang-wei WANG( ),Pei-lun LV,Shu-fang ZHENG,Ben WANG,Jian LI*() ),Pei-lun LV,Shu-fang ZHENG,Ben WANG,Jian LI*() |
| College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China |
|
|
|
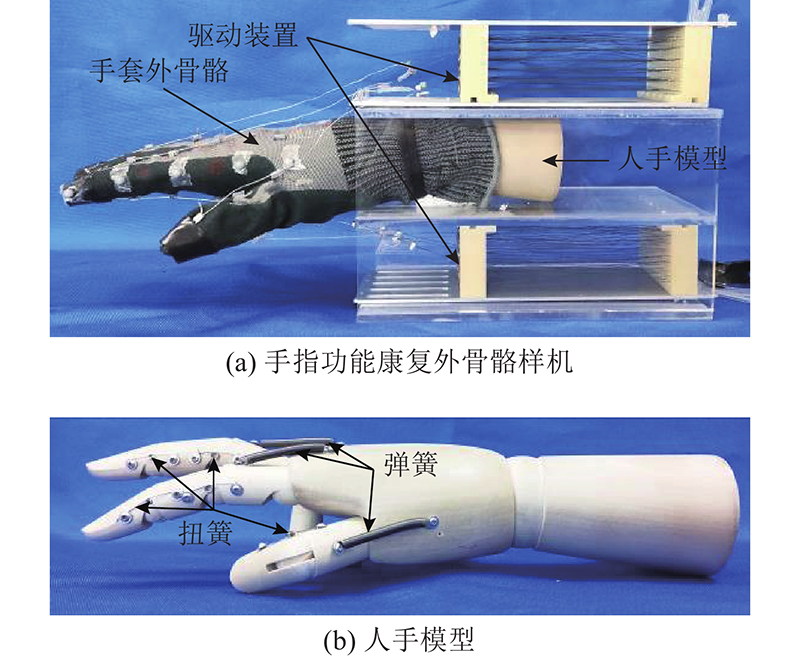
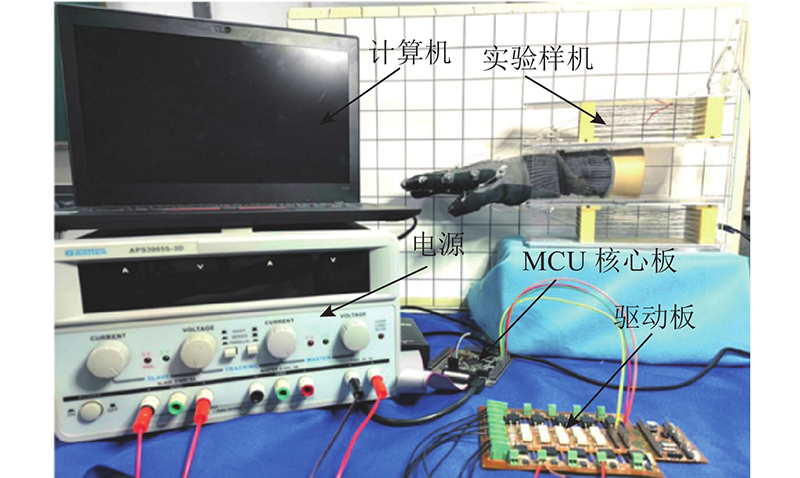
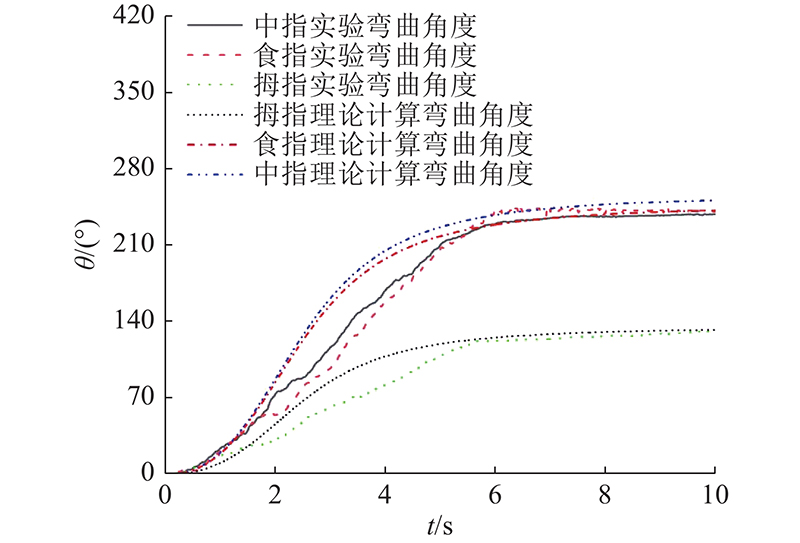
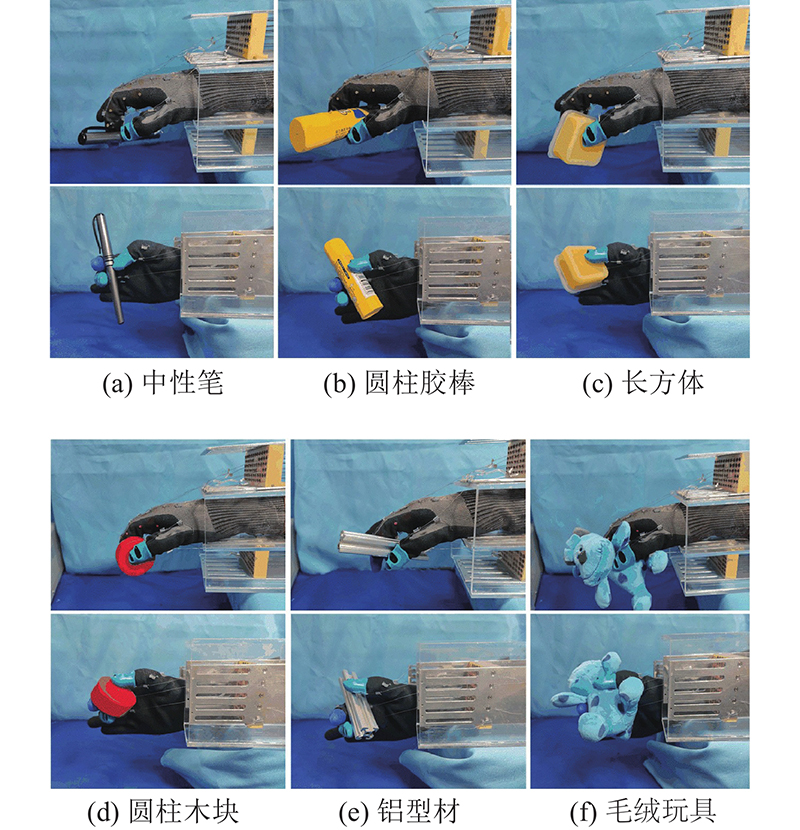
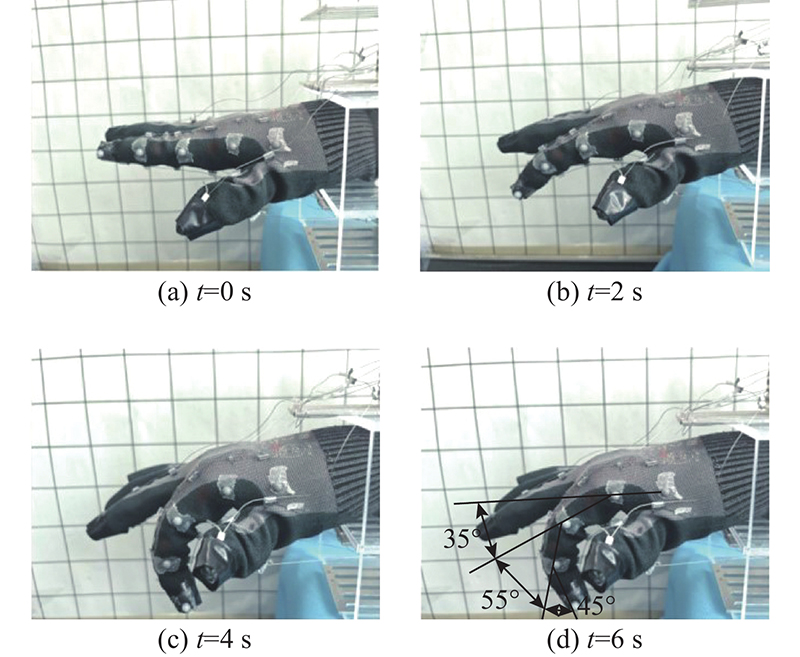
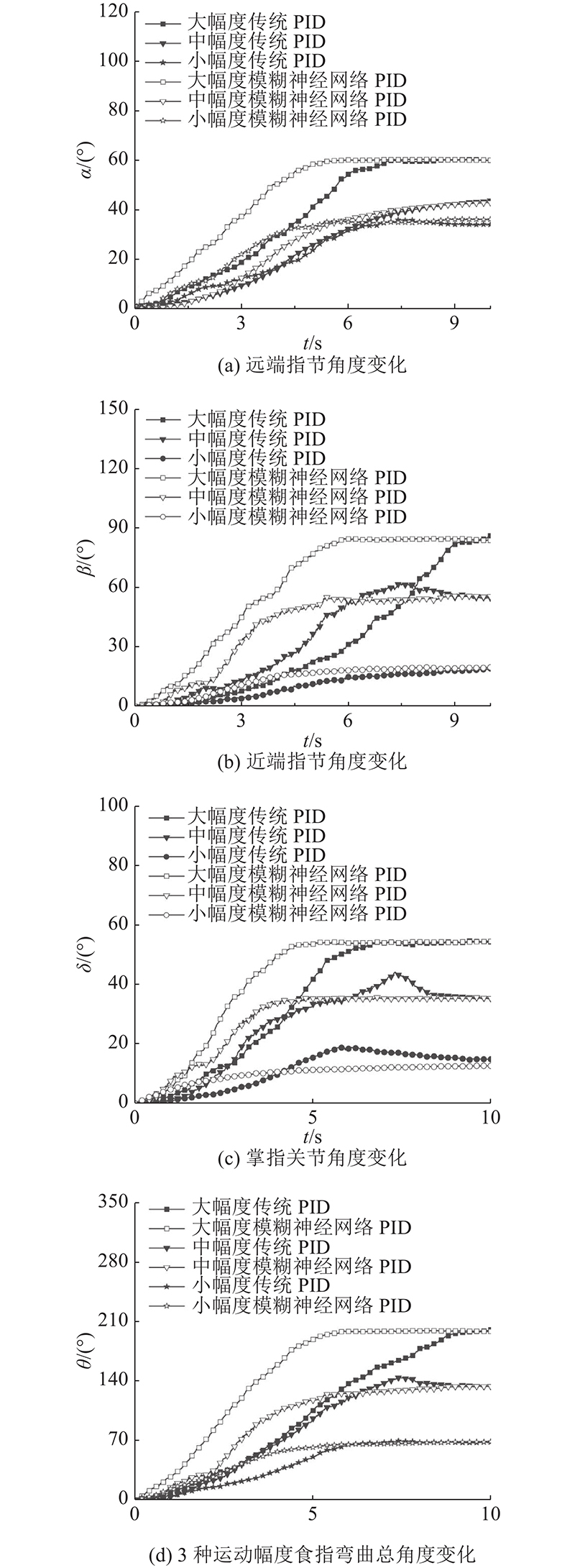
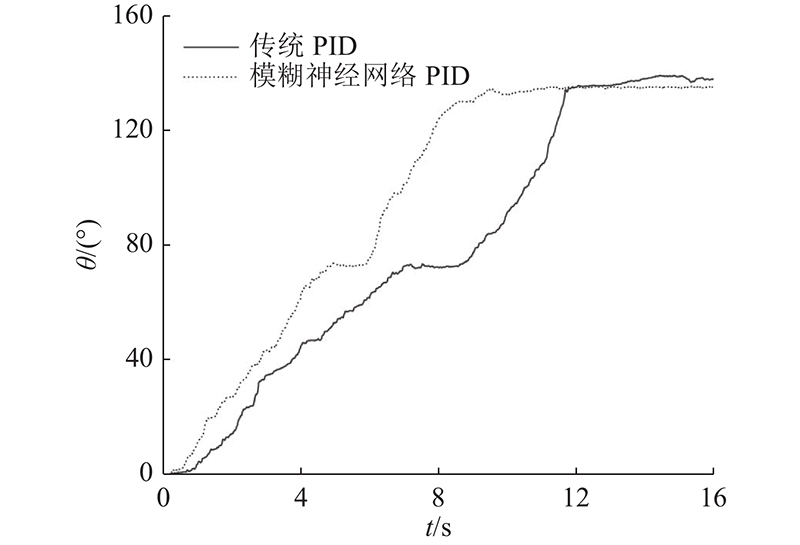
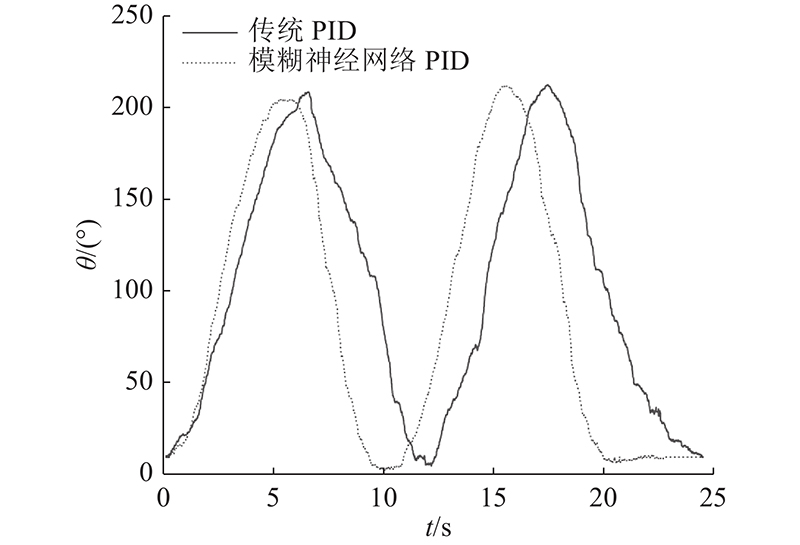
Abstract A finger rehabilitation device driven by shape memory alloy (SMA) wire was designed based on the analysis of the movement mechanism of the finger joints and tendons, in order to design a light and wearable finger rehabilitation device that adapts to the viscoelastic properties of finger joints. Besides, a kinematics model and an SMA drive model of the device were established. A fuzzy neural network PID control method was developed based on resistance feedback of SMA wires. The prototype of the device was made, and experiments were conducted to test its motion function and control performance. Results showed that the bionic exoskeleton could drive the fingers to achieve the expected passive rehabilitation. The maximum bending angles of the thumb, index finger and middle finger were 130.5°, 236.4°, and 242.5° respectively, which were similar to the bending angles of human fingers. And the bionic exoskeleton was able to assist the fingers to complete daily grasping movements. Compared with the traditional PID control, the fuzzy neural network PID control could shorten the response time of the bionic exoskeleton substantially, and the frequency of finger flexion and extension movement up to 6 times per minute.
|
|
Received: 30 December 2021
Published: 03 January 2023
|
|
|
| Fund: 国家自然科学基金资助项目(52075089);黑龙江省自然科学基金资助项目(LH2019E008) |
|
Corresponding Authors:
Jian LI
E-mail: wang.yangwei@nefu.edu.cn;lijian499@163.com
|
形状记忆合金驱动手指功能康复外骨骼设计
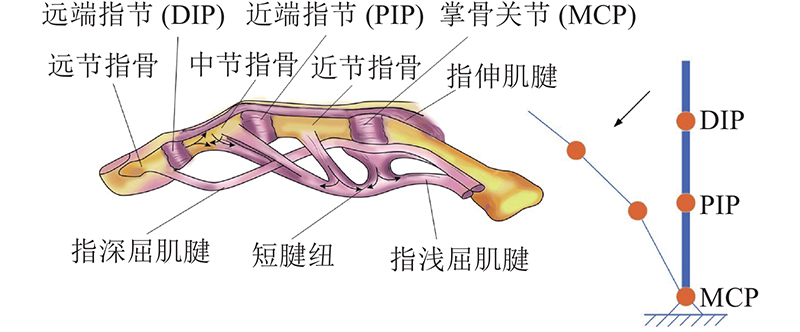
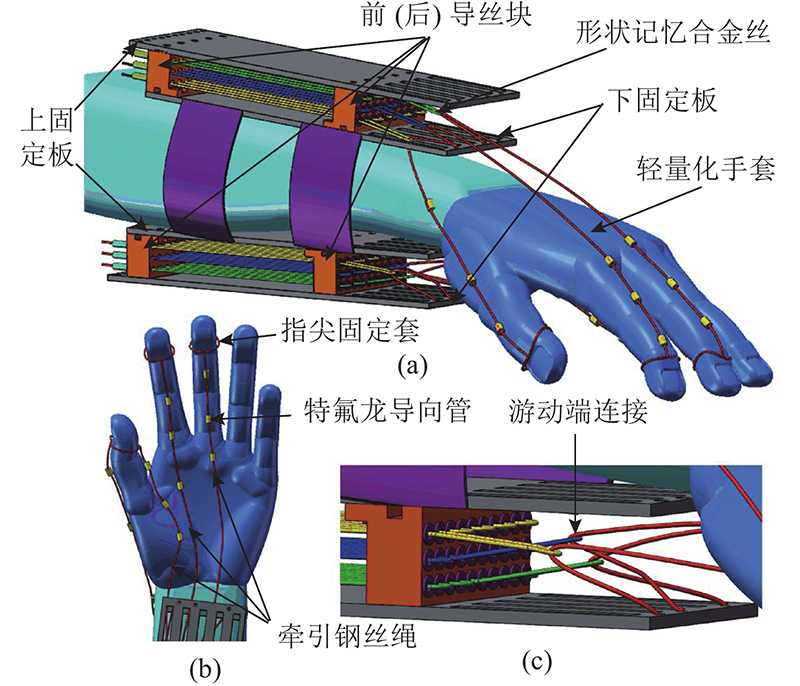
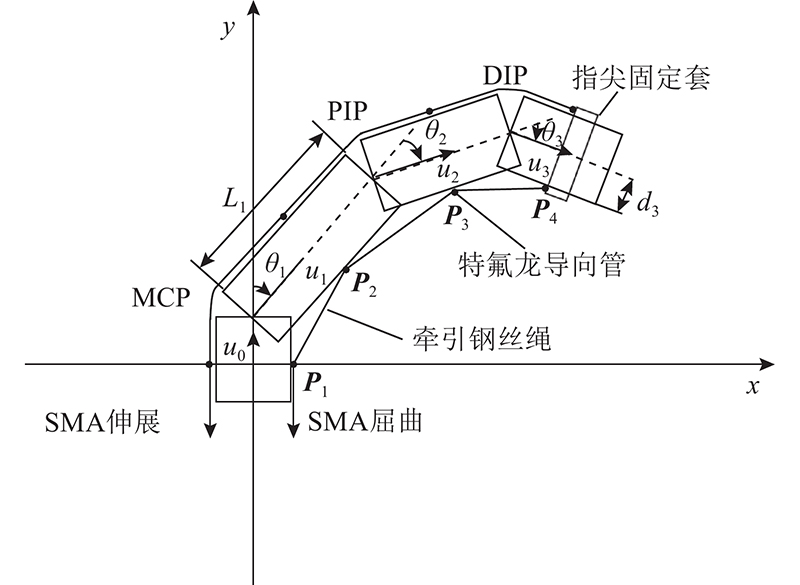
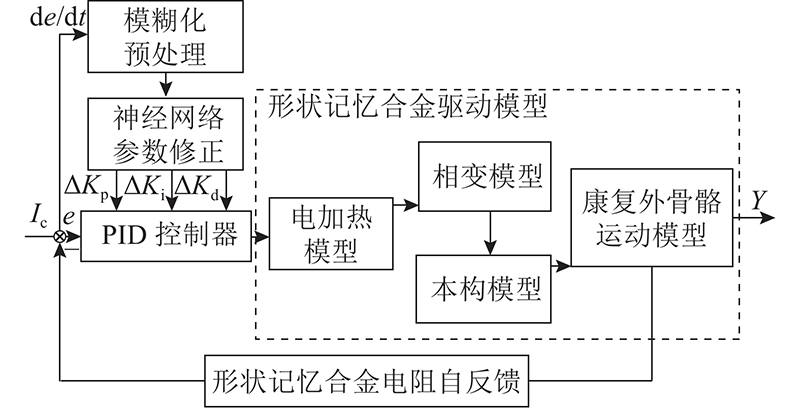
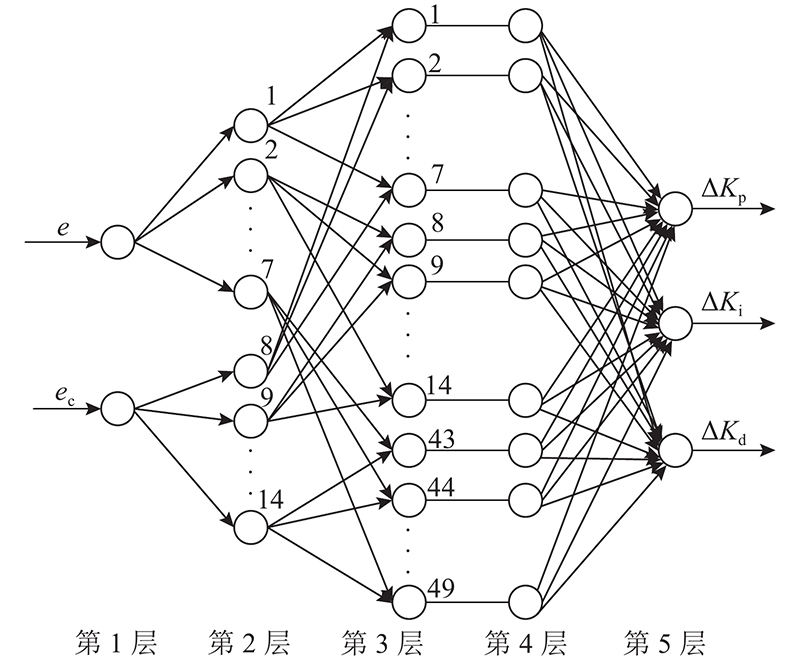
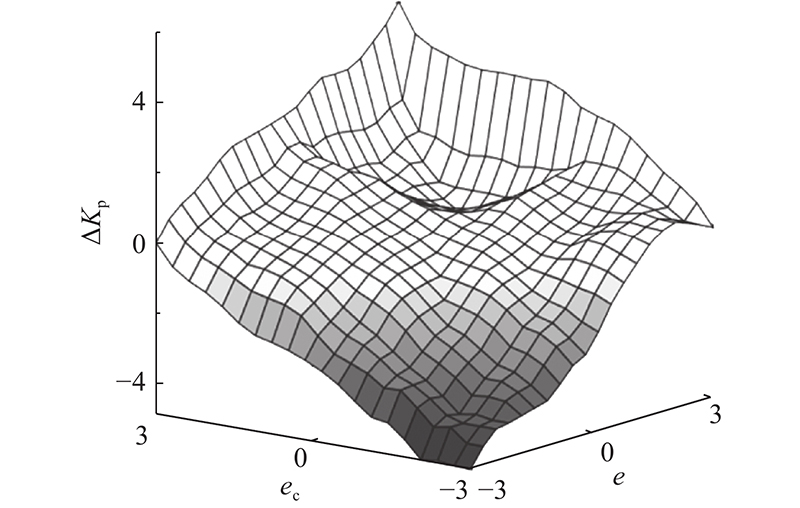
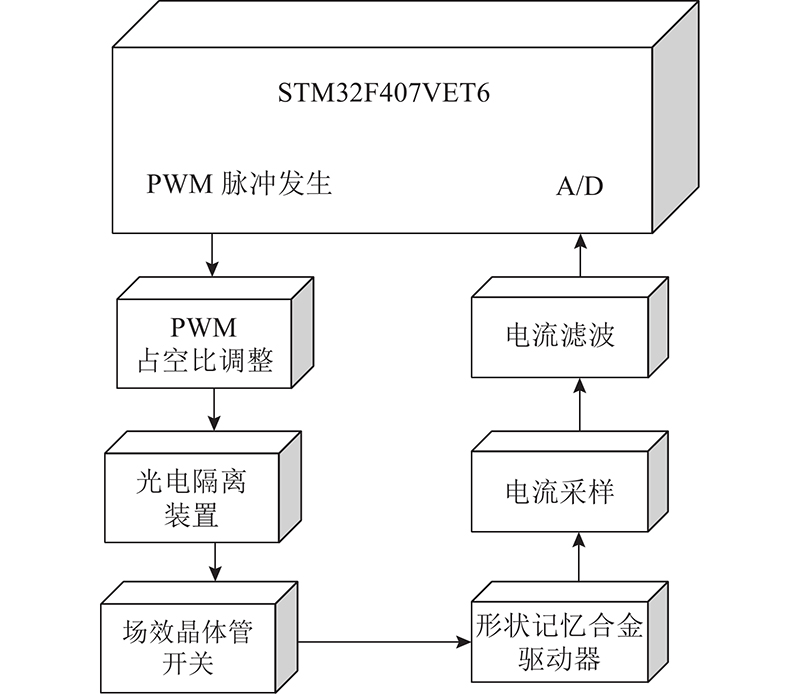
为了研制适应关节黏弹特性、轻便、可穿戴的手指功能康复装置,在分析手指关节、肌腱运动机理的基础上,设计形状记忆合金(SMA)丝驱动的手指功能康复装置. 建立该装置的运动学模型和SMA驱动模型,提出基于SMA丝电阻反馈的模糊神经网络PID控制方法,研制手指功能康复外骨骼样机,进行样机的运动性能和控制性能实验. 结果表明,仿生外骨骼实现了预期的手指被动康复运动,拇指、食指和中指的最大弯曲角度与人体手指的弯曲角度相近,分别为130.5°、236.4°、242.5°;仿生外骨骼能够辅助手指完成日常抓握动作;模糊神经网络PID相比于传统PID控制,有效缩短了仿生外骨骼的响应时间,手指的屈伸康复频率为6次/min.
关键词:
手指功能康复机器人,
形状记忆合金(SMA)丝,
软体外骨骼结构,
模糊神经网络PID,
位姿控制
|
|
| [1] |
张嘉楠 脑中风“年轻化”敲警钟[J]. 人人健康, 2021, (11): 34- 35
ZHANG Jia-nan Stroke "young" to sound the alarm[J]. Health for Everyone, 2021, (11): 34- 35
|
|
|
| [2] |
TIAN Y, WANG H, NIU B, et al Mechanical design and analysis of the end-effector finger rehabilitation robot (EFRR) for stroke patients[J]. Machines, 2021, 9 (6): 110
doi: 10.3390/machines9060110
|
|
|
| [3] |
何铭锋, 董葱, 黄日媚, 等 手指拔伸扳法对脑卒中后早期手功能障碍的康复效果[J]. 神经损伤与功能重建, 2020, 15 (10): 607- 609
HE Ming-feng, DONG Cong, HUANG Ri-mei, et al Effect of finger pulling and stretching trigger method on the rehabilitation of early hand dysfunction after stroke[J]. Neural Injury and Functional Reconstruction, 2020, 15 (10): 607- 609
doi: 10.16780/j.cnki.sjssgncj.20190420
|
|
|
| [4] |
LAI, Y J, YEH L J, CHIU M C An experimental investigation on shape memory alloy dynamic splint for a finger joint application[J]. Sensors and Actuators A: Physical, 2012, 173 (1): 210- 218
doi: 10.1016/j.sna.2011.11.012
|
|
|
| [5] |
ENOJAS M J B, RAMOS M C. Development of a finger soft pneumatic bending actuator [C]// 2019 4th Asia-Pacific Conference on Intelligent Robot Systems. Nagoya: IEEE, 2019: 1-5.
|
|
|
| [6] |
杨灿军, 彭桢哲, 徐铃辉, 等 柔性膝关节保护外骨骼及其行走助力方法设计[J]. 浙江大学学报:工学版, 2021, 55 (2): 213- 221
YANG Can-jun, PENG Zhen-zhe, XU Ling-hui, et al Design of flexible knee-joint protection exoskeleton and walking assistance method[J]. Journal of Zhejiang University: Engineering Science, 2021, 55 (2): 213- 221
|
|
|
| [7] |
KANG B B, CHOI H, LEE H, et al Exo-Glove Poly II: a polymer-based soft wearable robot for the hand with a tendon-driven actuation system[J]. Soft Robotics, 2019, 6 (2): 214- 227
doi: 10.1089/soro.2018.0006
|
|
|
| [8] |
NYCZ C J, BÜTZER T, LAMBERCY O, et al Design and characterization of a lightweight and fully portable remote actuation system for use with a hand exoskeleton[J]. IEEE Robotics and Automation Letters, 2016, 1 (2): 976- 983
doi: 10.1109/LRA.2016.2528296
|
|
|
| [9] |
LOW J H, ANG M H, YEOW C H. Customizable soft pneumatic finger actuators for hand orthotic and prosthetic applications [C]// 2015 IEEE International Conference on Rehabilitation Robotics. Singapore: IEEE, 2015: 380-385.
|
|
|
| [10] |
YI J, SHEN Z, SONG C, et al. A soft robotic glove for hand motion assistance [C]// 2016 IEEE International Conference on Real-time Computing and Robotics. Angkor Wat: IEEE, 2016: 111-116.
|
|
|
| [11] |
王扬威, 兰博文, 刘凯, 等 形状记忆合金丝驱动的柔性机械臂建模与实验[J]. 浙江大学学报:工学版, 2018, 52 (4): 628- 634
WANG Yang-wei, LAN Bo-wen, LIU Kai, et al Modeling and experiment of flexible manipulator actuated by shape memory alloy wire[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (4): 628- 634
|
|
|
| [12] |
杨建楠, 黄彬, 谷小军, 等 形状记忆合金力学行为与应用综述[J]. 固体力学学报, 2021, 42 (4): 345- 375
YANG Jian-nan, HUANG Bin, Gu Xiao-jun, et al A review of shape memory alloys: mechanical behavior and application[J]. Chinese Journal of Solid Mechanics, 2021, 42 (4): 345- 375
doi: 10.19636/j.cnki.cjsm42-1250/o3.2021.028
|
|
|
| [13] |
YANG J, SHI J, XIE H. Research on SMA actuated tendon driven hand exoskeleton with bidirectional finger joint motion coupling for rehabilitation usage [C]// 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems. Shenyang: IEEE, 2015: 336-340.
|
|
|
| [14] |
YAO Z, LINNENBERG C, ARGUBI-WOLLESEN A, et al Biomimetic design of an ultra-compact and light-weight soft muscle glove[J]. Production Engineering, 2017, 11: 731- 743
doi: 10.1007/s11740-017-0767-y
|
|
|
| [15] |
HADI A, ALIPOUR K, KAZEMINASAB S, et al ASR glove: a wearable glove for hand assistance and rehabilitation using shape memory alloys[J]. Journal of Intelligent Material Systems and Structures, 2017, 29 (8): 1575- 1585
|
|
|
| [16] |
PITTACCIO S, GARAVAGLIA L, CERIOTTI C, et al Applications of shape memory alloys for neurology and neuromuscular rehabilitation[J]. Journal of Functional Biomaterials, 2015, 6 (2): 328- 344
doi: 10.3390/jfb6020328
|
|
|
| [17] |
JEONG U, IN H K, CHO K J Implementation of various control algorithms for hand rehabilitation exercise using wearable robotic hand[J]. Intelligent Service Robotics, 2013, 6: 181- 189
doi: 10.1007/s11370-013-0135-5
|
|
|
| [18] |
SAITO S, DENG M. Modeling of an SMA actuator and its experimental verification [C]// 2019 International Conference on Advanced Mechatronic Systems. Kusatsu: IEEE, 2019: 98-101.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|