|
|
|
| Grasping docking mechanism of TBM steel arch splicing robot |
Yuan-fu HE1( ),Yi-min XIA1,*(),Bin LONG2,Zhao-hui DENG3,Mao-lin LEI2,Jie YAO3 ),Yi-min XIA1,*(),Bin LONG2,Zhao-hui DENG3,Mao-lin LEI2,Jie YAO3 |
1. College of Mechanical and Electrical Engineering, State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China
2. China Railway Construction Heavy Industry Co. Ltd, Changsha 410100, China
3. China Railway Siyuan Survey and Design Group Co. Ltd, Wuhan 430063, China |
|
|
|
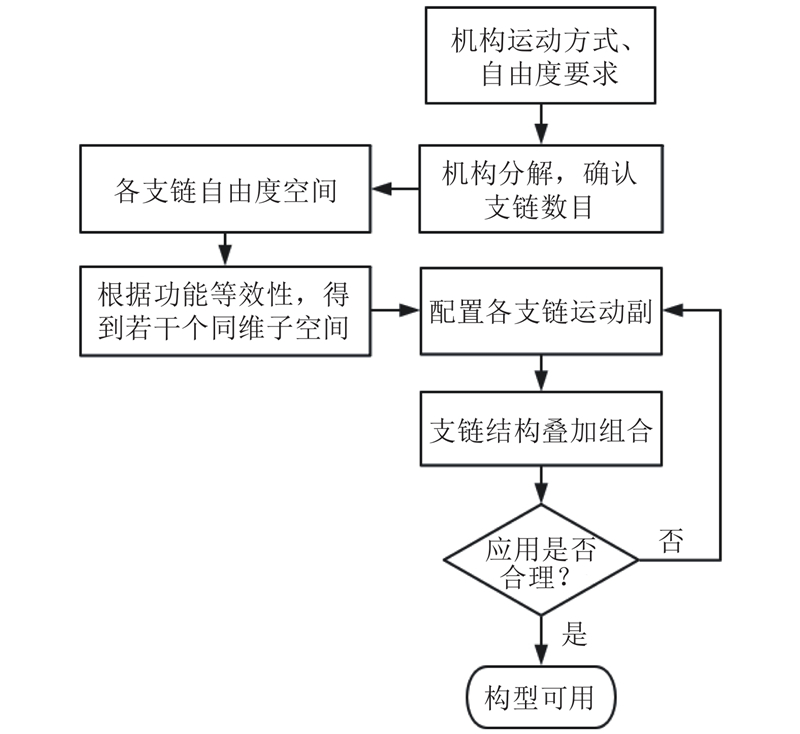
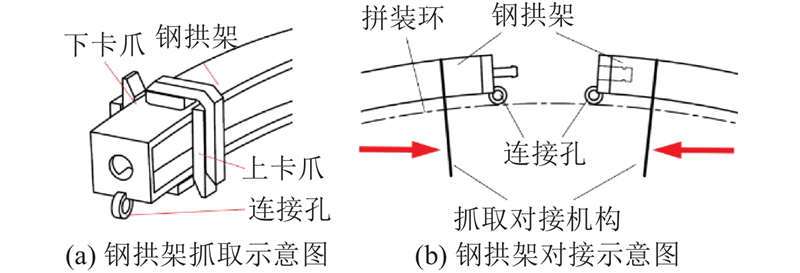
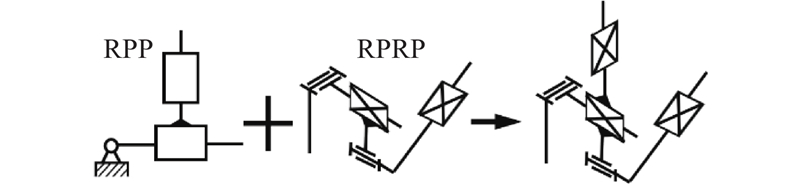
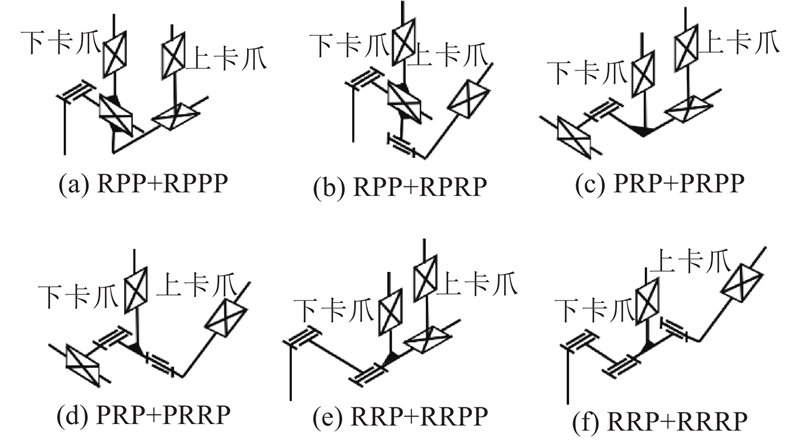
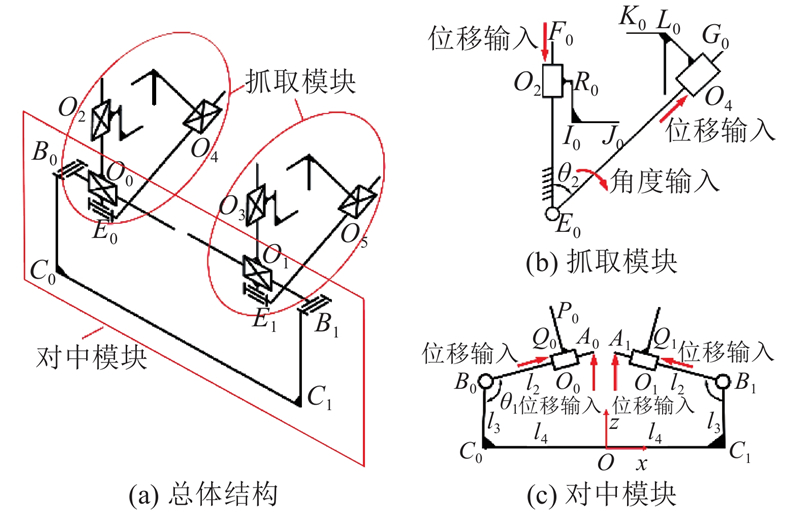
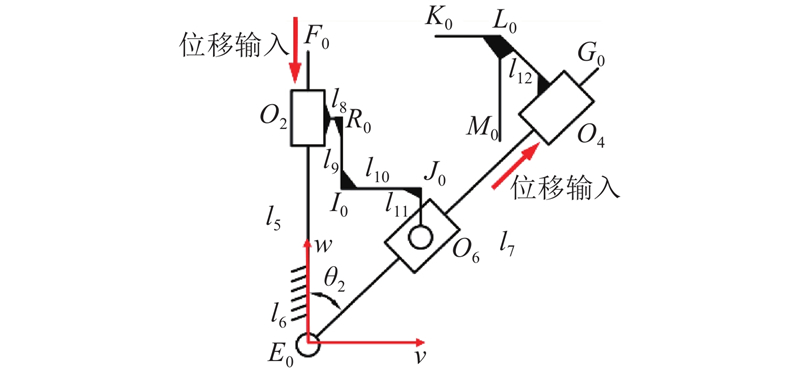
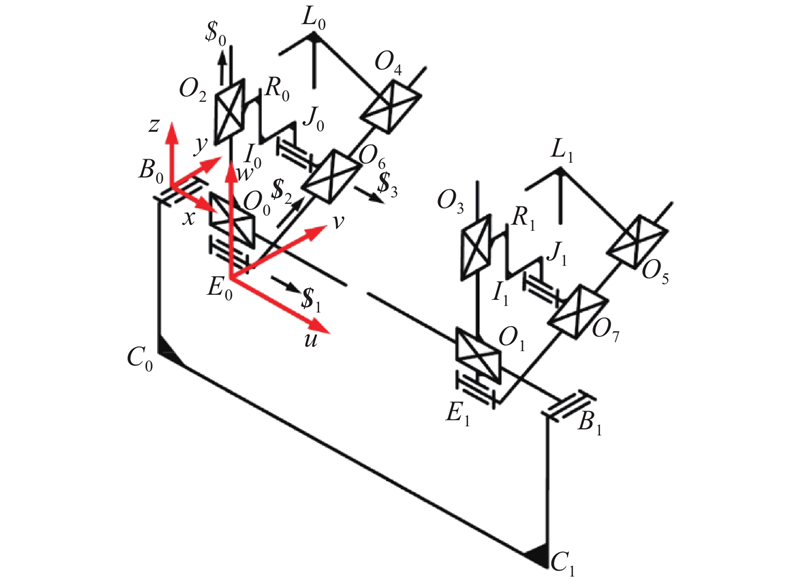
Abstract A grasping docking mechanism for tunnel boring machine (TBM) steel arch splicing manipulators was proposed to improve the splicing efficiency of steel arch and reduce the impact of manual work on construction. Firstly, the configuration of the grasping docking mechanism was constructed by the graphic method. The mechanism was decomposed into two branch chains according to the mechanism function realization method, and the degree of freedom (DOF) space and the constraint space were obtained. Some homogenous subspaces of the DOF space of each branch chain were obtained according to the functional equivalence of the line graph. The overall configuration of the mechanism was obtained by superposing and combining the motion pairs of branch chains which were reasonable for each homogenous subspace. Then, the kinematics model of the mechanism was established, and the inverse solutions of the position and rotation angle of each slider were obtained. The performance index of the mechanism was proposed. The transmission performance of the grasp module was analyzed by using the screw theory, and results show that the global transfer index of the grasping docking mechanism reached at least 0.75, which has good transfer performance, and the maximum value of its working space should be less than π/2. Finally, the prototype of the grasping docking mechanism was made, and experiments were conducted on the grasping process of the steel arch to verify the feasibility of the mechanism.
|
|
Received: 18 November 2019
Published: 15 December 2020
|
|
|
|
Corresponding Authors:
Yi-min XIA
E-mail: 173712148@csu.edu.cn;xiaymj@mail.csu.edu.cn
|
TBM钢拱架拼接机械手抓取对接机构
为了提高钢拱架拼接效率,降低人工作业对施工的影响,提出隧道掘进机(TBM)钢拱架拼接机械手的抓取对接机构. 利用图谱法对抓取对接机构进行构型设计,根据机构功能实现方式,将机构分解成2个支链,确定其自由度(DOF)空间和约束空间;根据线图的功能等效性,得到各支链自由度空间的若干同维子空间,配置合理的支链运动副,通过叠加组合,得到机构整体构型;建立机构的运动学模型,推导出机构各滑块位置与转动角的逆解;给出机构性能指标,利用螺旋理论,分析机构抓取模块的传递性能,结果表明,抓取对接机构的全局传递指标达到至少0.75,具有较好的传递性能,且其工作空间最大取值应小于π/2. 制作抓取对接机构的样机,对钢拱架拼接过程进行实验,验证机构的可行性.
关键词:
TBM钢拱架拼接,
抓取对接机构,
图谱法,
构型设计,
性能指标
|
|
| [1] |
霍军周, 吴瀚洋, 朱冬, 等 TBM机电耦合建模与同步控制策略对比分析[J]. 机械工程学报, 2018, 54 (1): 120- 126
HUO Jun-zhou, WU Han-yang, ZHU Dong, et al TBM electromechanical coupling modeling and comparative analysis of synchronous drive control strategy[J]. Journal of Mechanical Engineering, 2018, 54 (1): 120- 126
doi: 10.3901/JME.2018.01.120
|
|
|
| [2] |
夏毅敏, 钱聪, 李正光, 等 隧道掘进机支撑推进系统振动特性[J]. 浙江大学学报: 工学版, 2018, 52 (2): 233- 239
XIA Yi-min, QIAN Cong, LI Zheng-guang, et al Vibration characteristics of TBM supporting-thrusting system[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (2): 233- 239
|
|
|
| [3] |
陈玉羲, 龚国芳, 石卓, 等 基于施工数据的TBM支撑推进协调控制系统[J]. 浙江大学学报: 工学版, 2019, 53 (2): 250- 257
CHEN Yu-xi, GONG Guo-fang, SHI Zhuo, et al Coordinated control of gripper and thrust system for TBM based on construction data[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (2): 250- 257
|
|
|
| [4] |
MITELMAN A, ELMO D Analysis of tunnel-support interaction using an equivalent boundary beam[J]. Tunnelling and Underground Space Technology, 2019, 84: 218- 226
doi: 10.1016/j.tust.2018.11.021
|
|
|
| [5] |
HUANG C K A general method for developing different types of 3-DOF and 6-DOF isotropic manipulators[J]. Journal of the Chinese Society of Mechanical Engineers, 2019, 40 (2): 99- 108
|
|
|
| [6] |
BABIN V, GOSSELIN C Picking, grasping, or scooping small objects lying on flat surfaces: a design approach[J]. International Journal of Robotics Research, 2018, 37 (12): 1484- 1499
doi: 10.1177/0278364918802346
|
|
|
| [7] |
于红英, 曾重元, 郭震 少自由度变胞并联机构综合设计方法[J]. 哈尔滨工业大学学报, 2018, 50 (1): 42- 49
YU Hong-ying, ZENG Zhong-yuan, GUO Zhen Type synthesis method of lower-mobility metamorphic parallel mechanism[J]. Journal of Harbin Institute of Technology, 2018, 50 (1): 42- 49
|
|
|
| [8] |
李树军, 王洪光, 李小彭, 等 面向作业任务的约束变胞机构设计方法[J]. 机械工程学报, 2018, 54 (3): 26- 35
LI Shu-jun, WANG Hong-guang, LI Xiao-peng, et al Task-orientated design method of practical constraint metamorphic mechanisms[J]. Journal of Mechanical Engineering, 2018, 54 (3): 26- 35
doi: 10.3901/JME.2018.03.026
|
|
|
| [9] |
YANG Y, PENG Y, PU H Y, et al Design of 2-degrees-of-freedom (DOF) planar translational mechanisms with parallel linear motion elements for an automatic docking device[J]. Mechanism and Machine Theory, 2018, 121: 398- 424
doi: 10.1016/j.mechmachtheory.2017.11.005
|
|
|
| [10] |
EROL O, GOGU G, MEZOUAR Y A study on dexterous grasps via parallel manipulation analogy[J]. Journal of Intelligent and Robotic Systems, 2017, 87 (1): 3- 14
|
|
|
| [11] |
LAMBERT P, HERDER J L A 7-DOF redundantly actuated parallel haptic device combining 6-DOF manipulation and 1-DOF grasping[J]. Mechanism and Machine Theory, 2019, 134: 349- 364
doi: 10.1016/j.mechmachtheory.2019.01.002
|
|
|
| [12] |
GAO C Q, HUANG H L, LI B, et al Design of a truss-shaped deployable grasping mechanism using mobility bifurcation[J]. Mechanism and Machine Theory, 2019, 139: 346- 358
doi: 10.1016/j.mechmachtheory.2019.05.003
|
|
|
| [13] |
LIANG D Y, ZHANG W Z PASA-GB hand: a novel parallel and self-adaptive robot hand with gear-belt mechanisms[J]. Journal of Intelligent and Robotic Systems, 2018, 90: 3- 17
doi: 10.1007/s10846-017-0644-0
|
|
|
| [14] |
BORISOV I I, BORISOV O I, GROMOV V S, et al The UHVAT gripper: usable holding versatile adjustable tool to grasp different objects[J]. IFAC-PapersOnLine, 2018, 51 (11): 722- 727
doi: 10.1016/j.ifacol.2018.08.404
|
|
|
| [15] |
LU Y, ZHANG C G, CAO C J, et al Analysis of coordinated grasping kinematics and optimization of grasping force of a parallel hybrid hand[J]. International Journal of Advanced Robotic Systems, 2017, 14 (3): 1- 14
|
|
|
| [16] |
MAHYAR A, HAMED R, TALEBI H A, et al Optimal adaptive Jacobian internal forces controller for multiple whole-limb manipulators in the presence of kinematic uncertainties[J]. Mechatronics, 2018, 53: 1- 7
doi: 10.1016/j.mechatronics.2018.05.005
|
|
|
| [17] |
HWANG S, KIM H, CHOI Y, et al Design optimization method for 7 DOF robot manipulator using performance indices[J]. International Journal of Precision Engineering and Manufacturing, 2017, 18 (3): 293- 299
doi: 10.1007/s12541-017-0037-0
|
|
|
| [18] |
SHAO Z F, MO J, TANG X Q, et al Transmission index research of parallel manipulators based on matrix orthogonal degree[J]. Chinese Journal of Mechanical Engineering, 2017, 30 (6): 122- 131
|
|
|
| [19] |
ASSAL S F M A novel planar parallel manipulator with high orientation capability for a hybrid machine tool: kinematics, dimensional synthesis and performance evaluation[J]. Robotica, 2017, 35 (5): 1031- 1053
doi: 10.1017/S0263574715000958
|
|
|
| [20] |
XIE F, LI T, LIU X Type synthesis of 4-DOF parallel kinematic mechanisms based on grassmann line geometry and atlas method[J]. Chinese Journal of Mechanical Engineering, 2013, 26 (6): 1073- 1081
doi: 10.3901/CJME.2013.06.1073
|
|
|
| [21] |
秦超, 梁喜凤, 路杰, 等 七自由度番茄收获机械手的轨迹规划与仿真[J]. 浙江大学学报: 工学版, 2018, 52 (7): 1260- 1266
QIN Chao, LIANG Xi-feng, LU Jie, et al Trajectory planning and simulation for 7-DOF tomato harvesting manipulator[J]. Journal of Zhejiang University: Engineering Science, 2018, 52 (7): 1260- 1266
|
|
|
| [22] |
XIE F, LIU X J, WANG C Design of a novel 3-DOF parallel kinematic mechanism: type synthesis and kinematic optimization[J]. Robotica, 2015, 33 (3): 622- 637
doi: 10.1017/S0263574714000551
|
|
|
| [23] |
李研彪, 郑航, 徐梦茹, 等 5-PSS/UPU并联机构的多目标性能参数优化[J]. 浙江大学学报: 工学版, 2019, 53 (4): 654- 663
LI Yan-biao, ZHENG Hang, XU Meng-ru, et al Multi-target parameters of performance optimization for 5-PSS/UPU parallel mechanism[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (4): 654- 663
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|