| Mechanical Engineering |
|

|
|
|
| Variable buoyancy system performance for profile buoy “Fuxing” |
Yan-long ZHAO1,2,3( ),Xing-fei LI1,2,3,Shao-bo YANG1,2,3,*(),Hong-yu LI3,4,Jia-yi XU1,2,3,Yue LIN5 ),Xing-fei LI1,2,3,Shao-bo YANG1,2,3,*(),Hong-yu LI3,4,Jia-yi XU1,2,3,Yue LIN5 |
1. State Key Laboratory of Precision Measurement Technology and Instruments, Tianjin University, Tianjin 300072, China
2. Pilot National Laboratory for Marine Science and Technology (Qingdao), Qingdao 266237, China
3. Qingdao Institute for Marine Technology of Tianjin University, Qingdao 266237, China
4. College of Ocean Science and Engineering, Shandong University of Science and Technology, Qingdao 266590, China
5. CCS Qingdao Branch, Qingdao 266071, China |
|
|
|
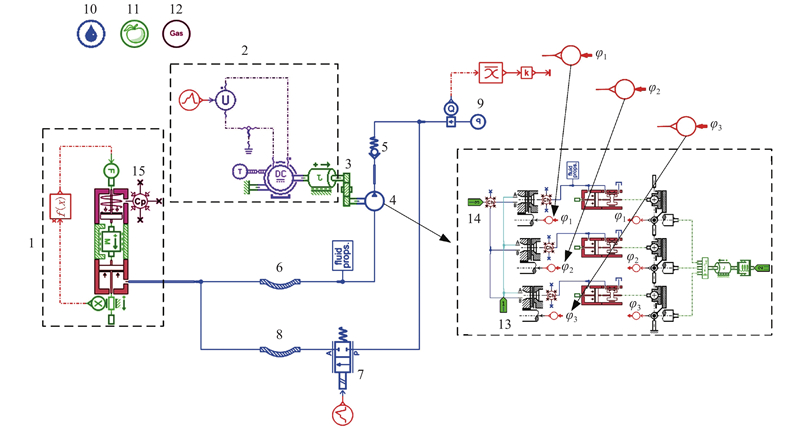
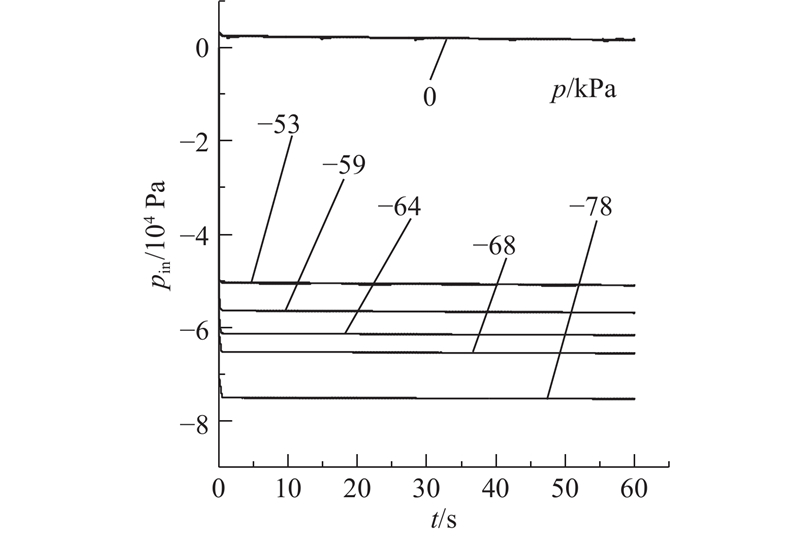
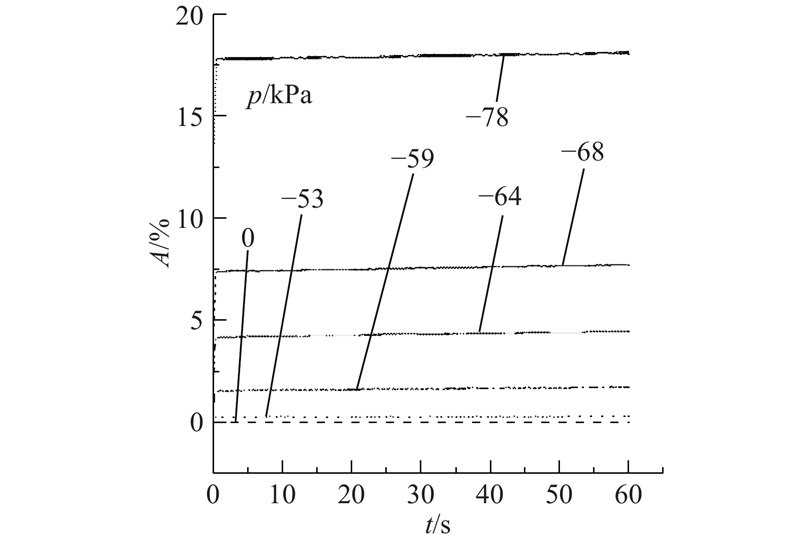
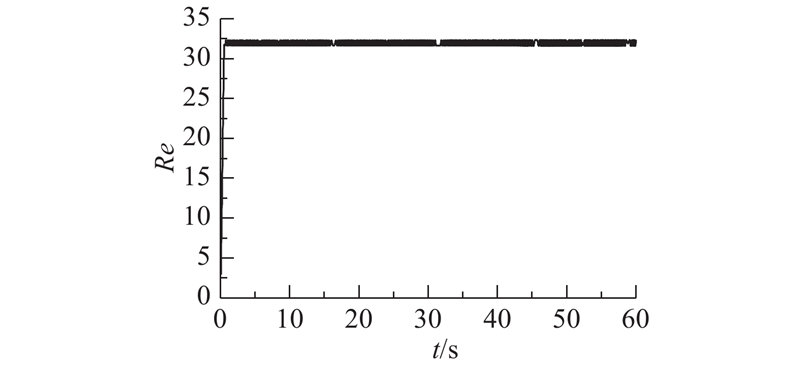
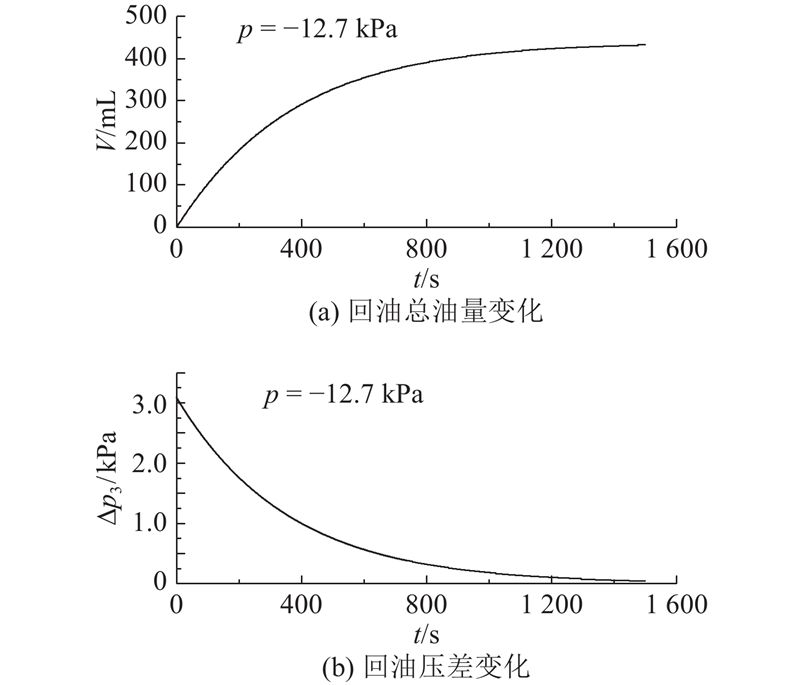
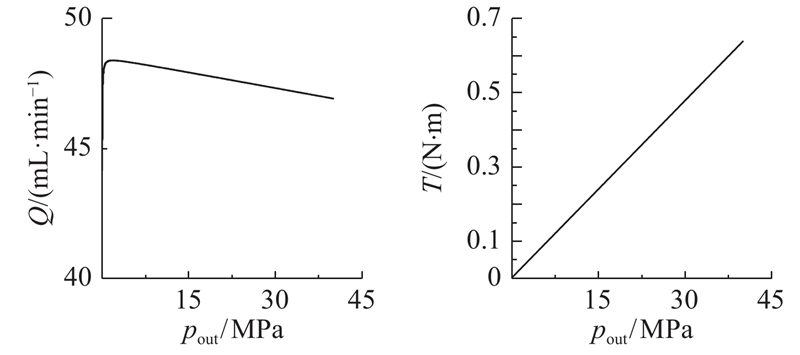
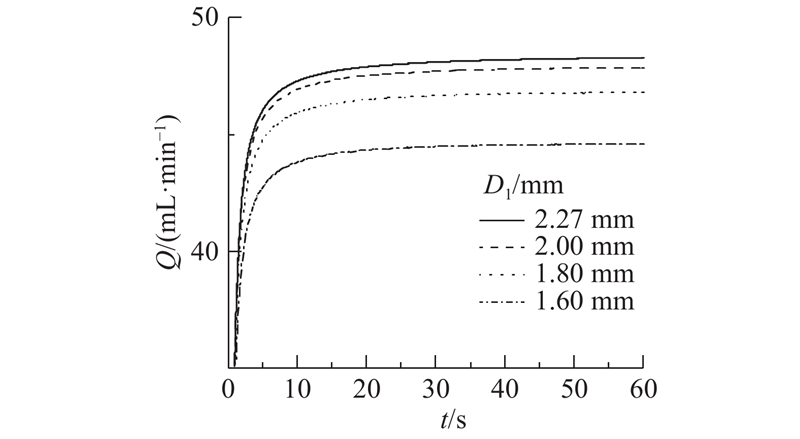
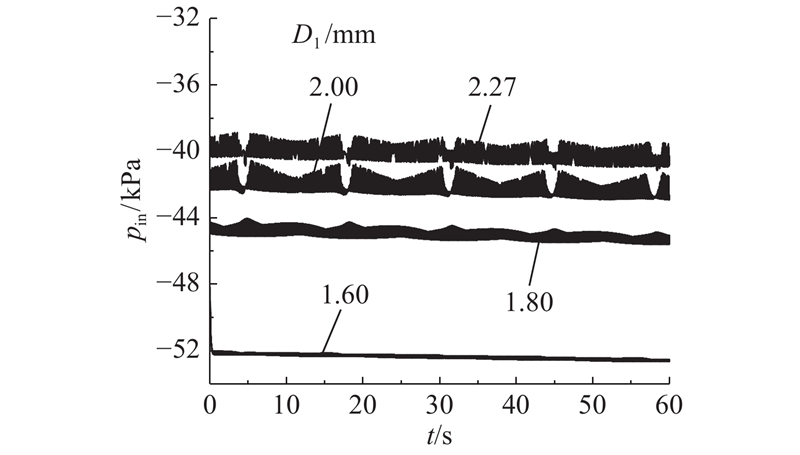
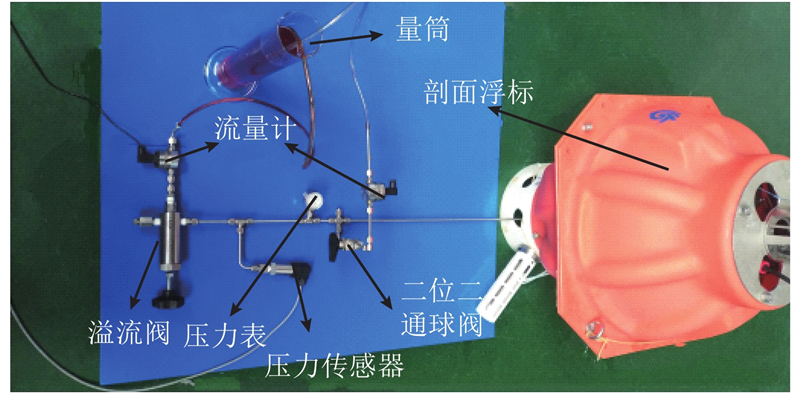
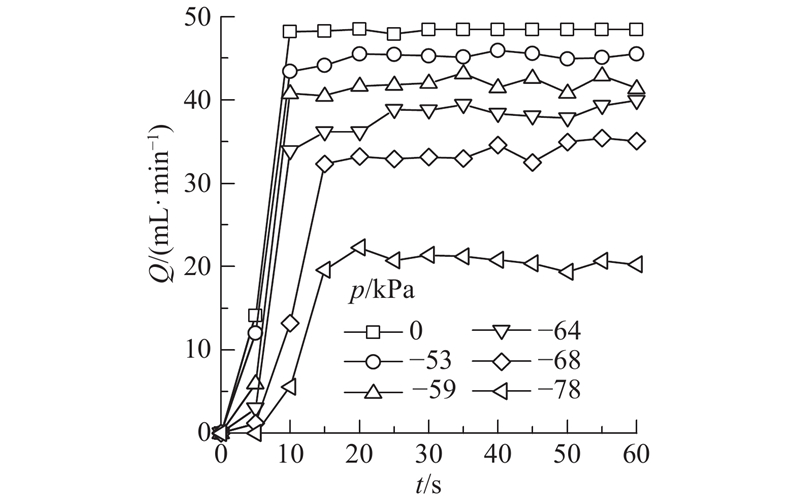
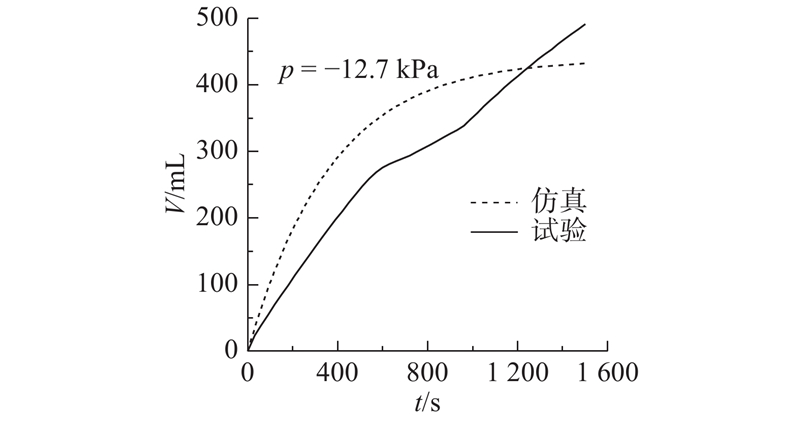
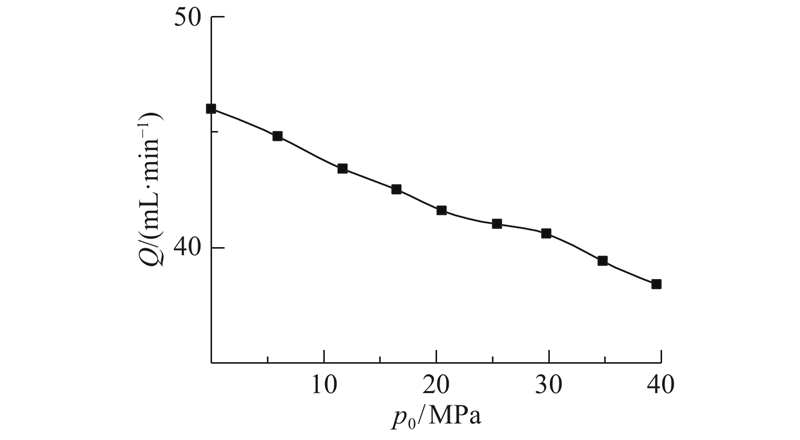
Abstract A mathematical model of piston pump inlet pressure was established to analyze the influence of the spring stiffness, pipeline diameter and ballast tank vacuum degree on the volume efficiency, based on the relationship between plunger pump inlet pressure and hydraulic oil saturation vapor pressure, in order to improve the pump volumetric efficiency under the special application condition of variable buoyancy system (VBS), of which the inner tank is in vacuum environment. Combined with AMESim software, the flow characteristics of oil discharge and oil return of VBS were analyzed emphatically. A test platform of VBS was built to verify the accuracy of simulation model and calculation results. Result show that it is prone to cavitation when the inlet pressure of the plunger pump is lower than the saturated vapor pressure of the hydraulic oil, which causes the volumetric efficiency of the plunger pump to decrease significantly. By adjusting the value range of spring stiffness, oil suction pipe diameter and ballast tank vacuum, etc., the inlet pressure can meet the design requirements, which helps to improve the volumetric efficiency of the plunger pump, to reduce the operating energy consumption of the profile buoy, thereby to improve the endurance of the profile buoy.
|
|
Received: 13 May 2019
Published: 06 July 2020
|
|
|
|
Corresponding Authors:
Shao-bo YANG
E-mail: zhaoyanlong22@163.com;yangskyle@tju.edu.cn
|
剖面浮标“浮星”可变浮力系统性能研究
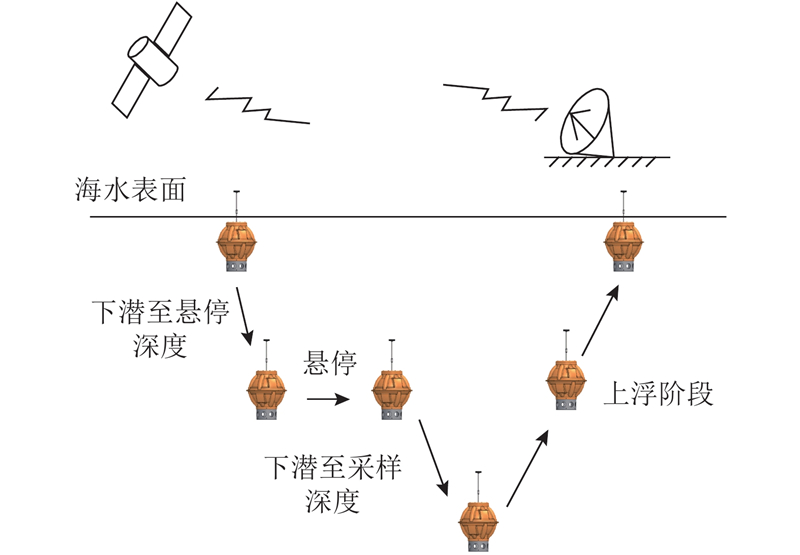
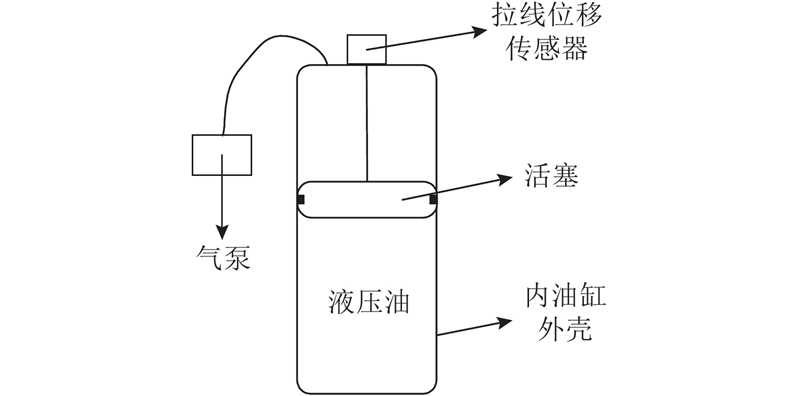
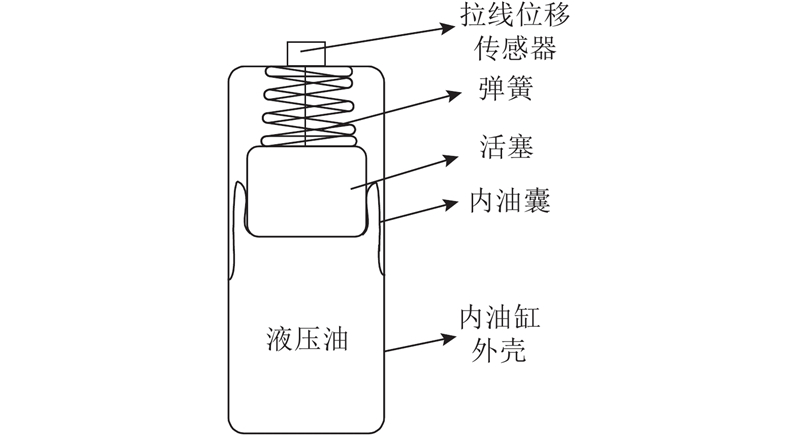
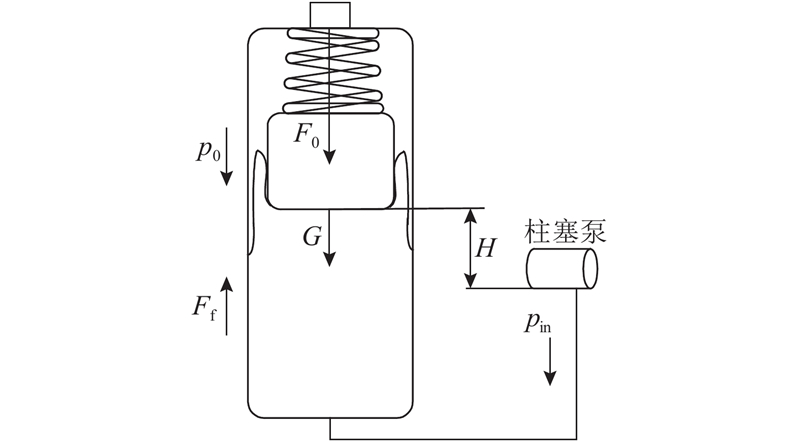
为了提高柱塞泵的容积效率,针对可变浮力系统(VBS)中内油箱处于真空环境下的特殊应用工况,基于柱塞泵进油口压力与液压油饱和蒸汽压的关系,建立柱塞泵进油口压力数学模型,分析弹簧刚度、吸油管路直径和压载舱真空度对柱塞泵容积效率的影响;结合AMESim软件,重点分析VBS排油和回油的流量特性;为了验证仿真模型和计算结果的准确性,搭建VBS性能测试平台. 结果表明:当柱塞泵进油口压力低于液压油饱和蒸汽压时,容易发生气穴现象,柱塞泵的容积效率会明显下降;通过调节弹簧刚度、吸油管路直径和压载舱真空度等参数的取值范围,使进油口压力满足设计要求,可以提高柱塞泵的容积效率,降低剖面浮标的运行能耗,从而提高剖面浮标的续航能力.
关键词:
浮标,
可变浮力系统 (VBS),
容积效率,
进油口压力,
饱和蒸汽压,
AMESim软件
|
|
| [1] |
陈鹿, 潘彬彬, 曹正良, 等 自动剖面浮标研究现状及展望[J]. 海洋技术学报, 2017, 36 (2): 1- 9
CHEN Lu, PAN Bin-bin, CAO Zheng-liang, et al Research status and prospects of automatic profiling floats[J]. Ocean Technology, 2017, 36 (2): 1- 9
|
|
|
| [2] |
王世明, 吴爱平 液压技术在ARGO浮标中的应用[J]. 流体传动与控制, 2010, (1): 50- 53
WANG Shi-ming, WU Ai-ping Application of hydraulics in ARGO buoyage[J]. Fluid Power Transmission and Control, 2010, (1): 50- 53
doi: 10.3969/j.issn.1672-8904.2010.01.016
|
|
|
| [3] |
WANG J, ZHANG H, WANG Y, et al. Dynamic simulation of buoyancy engine of underwater glider based on experimentation [C] // OCEANS 2017-Aberdeen. Aberdeen: IEEE, 2017: 1-5.
|
|
|
| [4] |
ZHENG R, WANG Y, WU J G AUV buoyancy regulating device design and simulation analysis[J]. Applied Mechanics and Materials, 2014, 468 (2014): 150- 157
|
|
|
| [5] |
RANGANATHAN T, ARAVAZHI S, MISHRA S, et al. Design and analysis of a novel underwater glider-RoBuoy [C] // 2018 IEEE International Conference on Robotics and Automation. Brisbane: ICRA, 2018: 2089-2094.
|
|
|
| [6] |
KANG C, ZHOU C. Development of a hydraulic buoyance adjustment module for underwater robots [C] // OCEANS 2016-Shanghai. Shanghai: IEEE, 2016: 1-7.
|
|
|
| [7] |
ZHENG R, WANG Y, WU J AUV buoyancy regulating device design and simulation analysis[J]. Applied Mechanics and Materials, 2014, 468: 150- 157
|
|
|
| [8] |
杨燕, 孙秀军, 王延辉 深海水下滑翔器浮力驱动系统设计[J]. 海洋技术学报, 2016, 35 (2): 9- 14
YANG Yan, SUN Xiu-jun, WANG Yan-hui Design of a buoyancy engine for deep sea gliders[J]. Ocean Technology, 2016, 35 (2): 9- 14
|
|
|
| [9] |
王佳. AUV浮力调节系统设计及控制策略研究[D]. 天津: 天津大学, 2018.
WANG Jia. Design of the variable buoyancy system of AUV and research of the control strategy[D]. Tianjin: Tianjin University, 2018.
|
|
|
| [10] |
RANGANATHAN T, SINGH V, NAIR R, et al Design of a controllable variable buoyancy module and its performance analysis as a cascaded system for selective underwater deployment[J]. Journal of Engineering for the Maritime Environment, 2017, 231 (4): 888- 901
|
|
|
| [11] |
杨海, 刘雁集 水下滑翔机浮力调节系统研制[J]. 中国舰船研究, 2018, 13 (6): 128- 133
YANG Hai, LIU Yan-ji Development of buoyancy regulating system for underwater glider[J]. Chinese Journal of Ship Research, 2018, 13 (6): 128- 133
|
|
|
| [12] |
武建国, 王雨, 郑荣 基于浮力调节的液压系统动态特性仿真[J]. 海洋技术学报, 2014, 33 (3): 6- 11
WU Jian-guo, WANG Yu, ZHENG Rong Simulation of the dynamic characteristics of the hydraulic system based on variable buoyancy system[J]. Ocean Technology, 2014, 33 (3): 6- 11
|
|
|
| [13] |
武建国, 石凯, 刘健, 等 6 000 m AUV “潜龙一号” 浮力调节系统开发及试验研究[J]. 海洋技术学报, 2014, 33 (5): 1- 7
WU Jian-guo, SHI Kai, LIU Jian, et al Development and experimental research on the variable buoyancy system for the 6 000 m rated class "Qianlong I" AUV[J]. Ocean Technology, 2014, 33 (5): 1- 7
|
|
|
| [14] |
SUN Q, ZHENG R, REN F, et al. The design and analysis of variable buoyancy system of AUV [C] // 2017 2nd Asia-Pacific Conference on Intelligent Robot Systems. Wuhan: ACIRS, 2017: 259-263.
|
|
|
| [15] |
赵伟, 杨灿军, 陈鹰 水下滑翔机浮力调节系统设计及动态性能研究[J]. 浙江大学学报: 工学版, 2009, 43 (10): 1772- 1776
ZHAO Wei, YANG Can-jun, CHEN Ying Design and dynamic performance study of buoyancy control system for water glider[J]. Journal of Zhejiang University: Engineering Science, 2009, 43 (10): 1772- 1776
|
|
|
| [16] |
范双双, 杨灿军, 彭时林, 等 水下滑翔机关键承压系统设计与试验研究[J]. 浙江大学学报: 工学版, 2014, 48 (4): 633- 640
FAN Shuang-shuang, YANG Can-jun, PENG Shi-lin, et al Design and experimental research on key pressure subsystems of underwater glider[J]. Journal of Zhejiang University: Engineering Science, 2014, 48 (4): 633- 640
|
|
|
| [17] |
ASAKAWA K, WATARI K, OHUCHI H, et al Buoyancy engine developed for underwater glider[J]. Advanced Robotics, 2016, 30 (1): 41- 49
doi: 10.1080/01691864.2015.1102647
|
|
|
| [18] |
王延辉, 张宏伟, 武建国 新型温差能驱动水下滑翔器系统设计[J]. 船舶工程, 2009, 31 (3): 51- 54
WANG Yan-hui, ZHANG Hong-wei, WU Jian-guo Design of a new type underwater glider propelled by temperature difference energy[J]. Ship Engineering, 2009, 31 (3): 51- 54
doi: 10.3969/j.issn.1000-6982.2009.03.015
|
|
|
| [19] |
NOAH M. Hydraulic control systems[M]. New Jersey: Wiley, 2005.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|