| Computer and Control Engineering |
|


|
|
|
| Design of portable three-dimensional sonar for both far-field and near-field |
Dong-dong ZHAO1( ),Xue-song LIU1,2,*(),Fan ZHOU1,2,Ying-tian HU3,Yao-wu CHEN1,2,4 ),Xue-song LIU1,2,*(),Fan ZHOU1,2,Ying-tian HU3,Yao-wu CHEN1,2,4 |
1. Institute of Advanced Digital Technology and Instrumentation, Zhejiang University, Hangzhou 310027, China
2. Zhejiang Provincial Key Laboratory for Network Multimedia Technologies, Hangzhou 310027, China
3. State Key Laboratory of Modern Optical Instrumentation, Zhejiang University, Hangzhou 310027, China
4. National Laboratory of Industrial Control Technology, Zhejiang University, Hangzhou 310027, China |
|
|
|
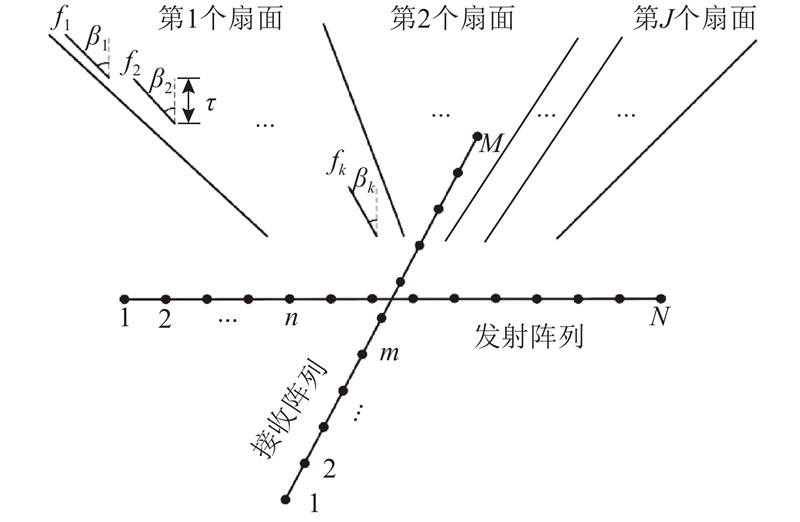
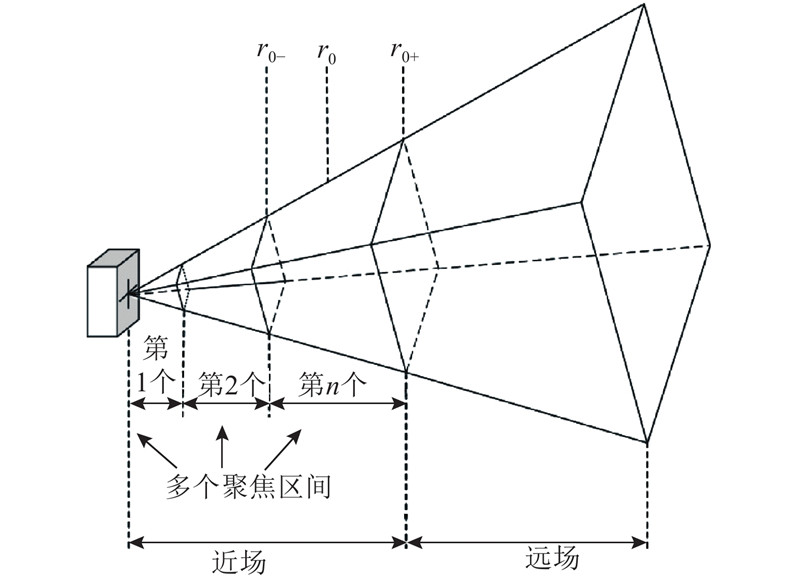
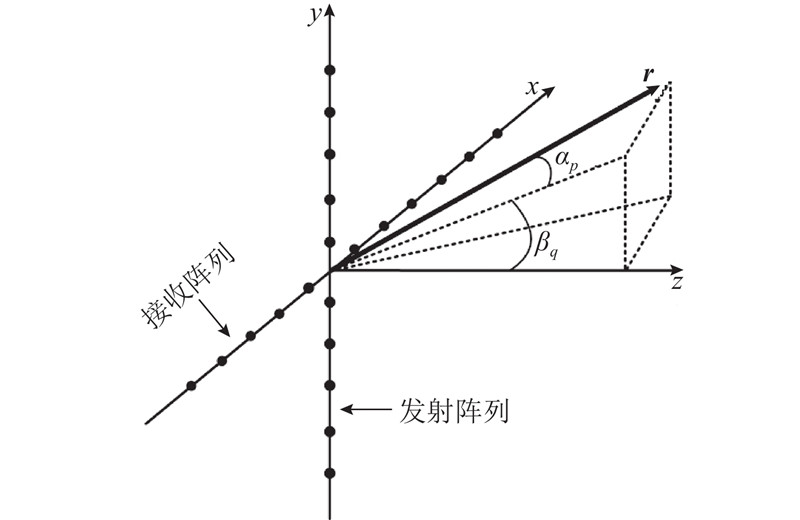
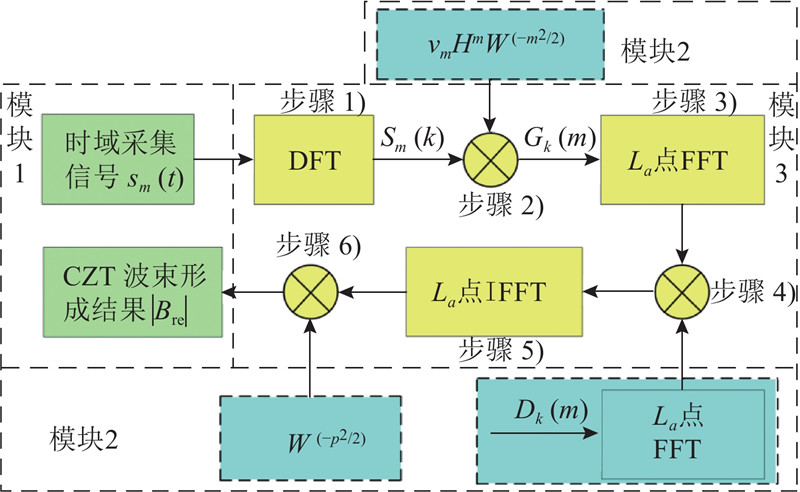
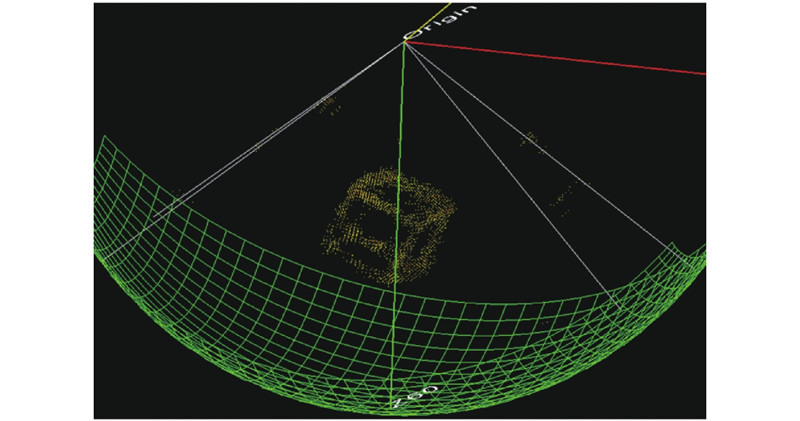
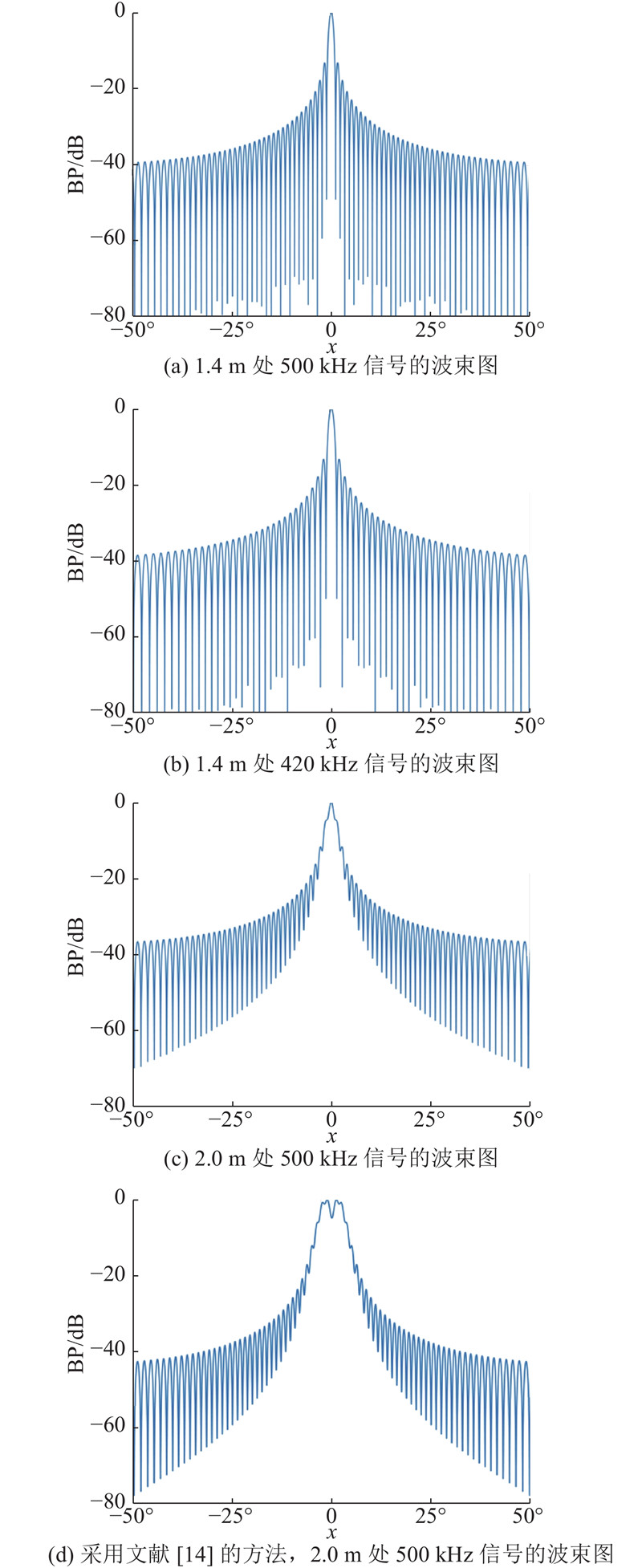
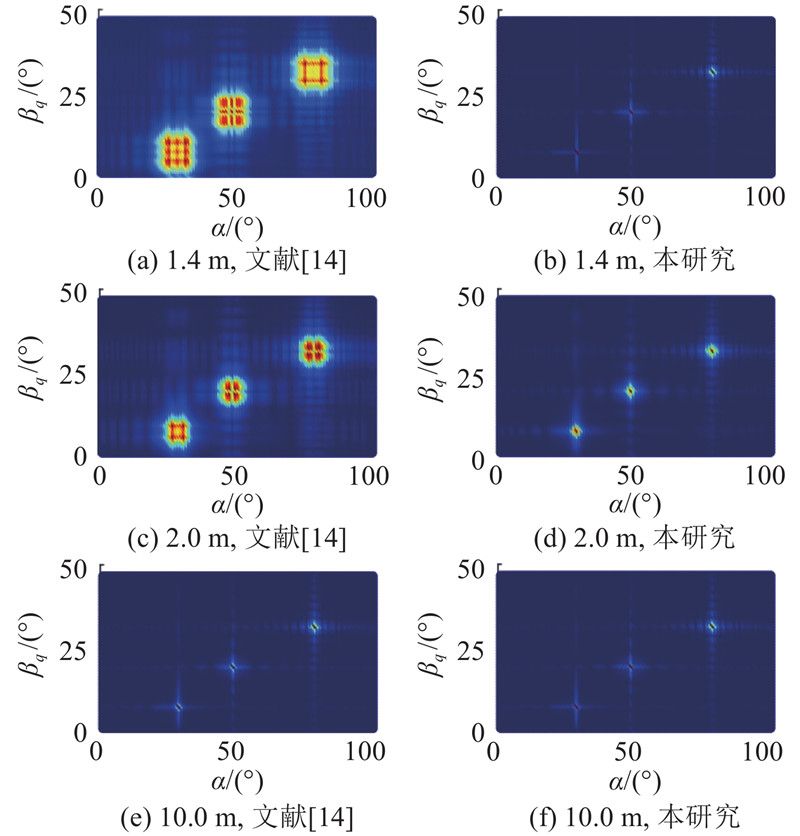
Abstract A design of portable three-dimensional (3D) imaging sonar for both far-field and near-field was proposed, in order to reduce the complexity of 3D imaging sonar system and guarantee the accuracy of beam patterns for the whole underwater scene. The cross array, which could largely simplify the hardware complexity compared to the planar array, was used to achieve 3D sonar imaging and make the system portable. For the transmitting array, a near-field multiple-frequency transmitting algorithm was proposed to guarantee the performance of the beam pattern in the near field. The whole 3D scene was divided into several focal regions according to the depth of field, and the time-delay parameters for each focal region were calculated based on the Fresnel approximation. For the receiving array, an optimized chirp zeta transform beamforming was proposed to implement both far-field and near-field fast beamforming with lower computational requirement than those of other methods. The simulation experiments demonstrated that the angle resolution and the side lobe peak of the proposed algorithm had a relative small variation in the near field focal regions, and the performance of the beam pattern was stable. The real underwater tests verified that the proposed design could generate high quality underwater images within the detection scenes.
|
|
Received: 19 June 2018
Published: 21 February 2019
|
|
|
|
Corresponding Authors:
Xue-song LIU
E-mail: zhaodd@zju.edu.cn;11015006@zju.edu.cn
|
兼顾远场和近场性能的便携式三维声纳设计
为了降低三维成像声纳系统的复杂度,并保证系统在整个水下探测范围内具有准确的波束图,提出兼顾远场和近场性能的便携式三维成像声纳设计方法. 该设计采用十字型阵列实现三维声纳成像,相比平面阵,极大降低了硬件复杂度,设备灵活轻便. 针对发射阵列,提出近场条件下的多频发射波束形成算法,根据十字型阵列的景深划分多个发射聚焦区间,并通过菲涅尔近似,配置各聚焦区间的时延参数,保证近场的波束性能. 针对接收阵列,提出优化的CZT (chirp zeta transform) 波束形成算法,可实现远场和近场条件下的快速波束形成,且计算量低于其他波束形成算法. 仿真实验表明,在近场聚焦区间内,该算法的角度分辨率和旁瓣高度变化差异较小,波束图性能稳定. 实际水下实验证实该设计可以在探测场景内获得清晰的水下三维图像.
关键词:
便携式三维声纳,
水下三维成像,
十字型阵列,
远场,
近场,
计算量需求
|
|
| [1] |
MURINO V, TRUCCO A Three-dimensional image generation and processing in underwater acoustic vision[J]. Proceedings of the IEEE, 2000, 88 (12): 1903- 1948
doi: 10.1109/5.899059
|
|
|
| [2] |
PALOMERAS N, HURTOS N, CARRERAS M, et al Autonomous mapping of underwater 3D structures: from view planning to execution[J]. IEEE Robotics and Automation Letters, 2018, 3 (3): 1965- 1971
doi: 10.1109/LRA.2018.2808364
|
|
|
| [3] |
PARSONS M J G, PARNUM I M, MCCAULEY R D Visualizing samsonfish (seriola hippos) with a reson 7125 seabat multibeam sonar[J]. ICES Journal of Marine Science, 2013, 70 (3): 665- 674
doi: 10.1093/icesjms/fst009
|
|
|
| [4] |
DAVISA, LUGSDIN A. High speed underwater inspection for port and harbour security using Coda Echoscope 3D sonar [C] // Proceedings of OCEANS 2005 MTS/IEEE. Washington DC: IEEE, 2005: 2006–2011.
|
|
|
| [5] |
TRUCCO A, MARTELLI S, CROCCO M Low-cost acoustic cameras for underwater wideband passive imaging[J]. IEEE Journal of Oceanic Engineering, 2015, 40 (4): 929- 937
doi: 10.1109/JOE.2014.2377454
|
|
|
| [6] |
ROUX E, RAMALLIi A, LIEBGOTT H, et al Wideband 2-D array design optimization with fabrication constraints for 3-D US imaging[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2017, 64 (1): 108- 125
doi: 10.1109/TUFFC.2016.2614776
|
|
|
| [7] |
HAUPT R L Thinned arrays using genetic algorithms[J]. IEEE Transactions on Antennas and Propagation, 1994, 42 (7): 993- 999
doi: 10.1109/8.299602
|
|
|
| [8] |
HA B V, MUSSETTA M, PIRINOLI P, et al Modified compact genetic algorithm for thinned array synthesis[J]. IEEE Antennas and Wireless Propagation Letters, 2016, 15: 1105- 1108
doi: 10.1109/LAWP.2015.2494839
|
|
|
| [9] |
MASSA A, ROCCA P, OLIVERI G Compressive sensing in electromagnetics-areview[J]. IEEE Antennas and Propagation Magazine, 2015, 57 (1): 224- 238
doi: 10.1109/MAP.2015.2397092
|
|
|
| [10] |
PINCHERA D, MIGLIORE M D, SCHETTINO F, et al An effective compressed-sensing inspired deterministic algorithm for sparse array synthesis[J]. IEEE Transactions on Antennas and Propagation, 2018, 66 (1): 149- 159
doi: 10.1109/TAP.2017.2767621
|
|
|
| [11] |
PALMESE M, TRUCCO A Three-dimensional acoustic imaging by chirp zeta transform digital beamforming[J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58 (7): 2080- 2086
doi: 10.1109/TIM.2009.2015523
|
|
|
| [12] |
HAN Y, TIAN X, ZHOU F, et al A real-time 3-D underwater acoustical imaging system[J]. IEEE Journal of Oceanic Engineering, 2014, 39 (4): 620- 629
doi: 10.1109/JOE.2013.2285952
|
|
|
| [13] |
EHRHARDT M, DEGEL C, BECKER F J, et al. Comparison of different short-range sonar systems on real structures and objects [C] // OCEANS 2017. Aberdeen: IEEE, 2017: 1–6.
|
|
|
| [14] |
LIU X, ZHOU F, ZHOU H, et al A low-complexity real-time 3-D sonar imaging system with a cross array[J]. IEEE Journal of Oceanic Engineering, 2016, 41 (2): 262- 273
doi: 10.1109/JOE.2015.2439851
|
|
|
| [15] |
MURINO V, TRUCCO A, TACCONI G. Space-varying automatic focalization for the focused beamforming process [C] // 2nd European Conference on Underwater acoustics. Copenhagen: European Commission, 1994: 697–702.
|
|
|
| [16] |
TRUCCO A A least squares approximation for the delays used in focused beamforming[J]. Journal of the Acoustical Society of America, 1998, 104 (1): 171- 175
doi: 10.1121/1.423286
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|