| 机械与能源工程 |
|


|
|
|
| 局部干法水下焊接技术的发展 |
韩雷刚1( ),钟启明1,陈国栋2,张芩3,王振民1,*() ),钟启明1,陈国栋2,张芩3,王振民1,*() |
1. 华南理工大学 机械与汽车工程学院,广东 广州 510640
2. 中广核研究院有限公司 智能设备和机器人研究所,广东 深圳 518031
3. 华南理工大学 计算机科学与工程学院,广东 广州 510640 |
|
| Development of local dry underwater welding technology |
| Lei-gang HAN1(),Qi-ming ZHONG1,Guo-dong CHEN2,Qin ZHANG3,Zhen-min WANG1,*() |
1. School of Mechanical and Automotive Engineering, South China University of Technology, Guangzhou 510640, China
2. Intelligent Equipment and Robotics Institute, China Nuclear Power Technology Research Institute Limited Company, Shenzhen 518031, China
3. School of Computer Science and Engineering, South China University of Technology, Guangzhou 510640, China |
引用本文:
韩雷刚,钟启明,陈国栋,张芩,王振民. 局部干法水下焊接技术的发展[J]. 浙江大学学报(工学版), 2019, 53(7): 1252-1264.
Lei-gang HAN,Qi-ming ZHONG,Guo-dong CHEN,Qin ZHANG,Zhen-min WANG. Development of local dry underwater welding technology. Journal of ZheJiang University (Engineering Science), 2019, 53(7): 1252-1264.
链接本文:
http://www.zjujournals.com/eng/CN/10.3785/j.issn.1008-973X.2019.07.003
或
http://www.zjujournals.com/eng/CN/Y2019/V53/I7/1252
|
| 1 |
周灿丰, 焦向东, 陈家庆, 等 海洋工程水下连接新技术[J]. 北京石油化工学院学报, 2006, 14 (3): 20- 25
ZHOU Can-feng, JIAO Xiang-dong, CHEN Jia-qing, et al. New underwater joining technologies applied in offshore engineering[J]. Journal of Beijing Institute of Petro-chemical Technology, 2006, 14 (3): 20- 25
doi: 10.3969/j.issn.1008-2565.2006.03.006
|
| 2 |
GAO H, JIAO X, ZHOU C, et al Study on remote control underwater welding technology applied in nuclear power station[J]. Procedia Engineering, 2011, 15: 4988- 4993
doi: 10.1016/j.proeng.2011.08.927
|
| 3 |
CASTRO C A N D, LI S F Y, NAGASHIMA A, et al Standard reference data for the thermal conductivity of liquids[J]. Journal of Physical and Chemical Reference Data, 1986, 15 (3): 1073- 1086
doi: 10.1063/1.555758
|
| 4 |
LI H L, LIU D, YAN Y T, et al Microstructural characteristics and mechanical properties of underwater wet flux-cored wire welded 316L stainless steel joints[J]. Journal of Materials Processing Technology, 2016, 238: 423- 430
doi: 10.1016/j.jmatprotec.2016.08.001
|
| 5 |
JI J, HU X, HUA Z, et al. Research of soft switching arc welding inverter power supply with high-frequency and high-power [C] // 2014 International Power Electronics and Application Conference and Exposition. Shanghai: IEEE, 2014: 924-929.
|
| 6 |
冯允樑. 核乏燃料池水下局部干法机器人焊接电源的研究[D]. 广州: 华南理工大学, 2016.
FENG Yun-liang. Research on local dry automatic underwater welding power supply for nuclear fuel tank [D]. Guangzhou: South China University of Technology, 2016.
|
| 7 |
赵博, 武传松, 贾传宝, 等 水深和流速对水下湿法焊接热过程影响的数值模拟[J]. 焊接学报, 2013, 34 (8): 55- 58
ZHAO Bo, WU Chuan-song, JIA Chuan-bao, et al Numerical simulation of influence of water depth and flowing speed on thermal process of underwater wet welding[J]. Transactions of the China Welding Institutution, 2013, 34 (8): 55- 58
|
| 8 |
BO Z, CHUANSONG W U, JIAN C, et al Numerical analysis of the weld bead profiles in underwater wet flux-cored arc welding[J]. Acta Metallurgica Sinica, 2013, 49 (7): 797
doi: 10.3724/SP.J.1037.2013.00061
|
| 9 |
赵博, 武传松, 贾传宝, 等 水下湿法FCAW焊缝成形的数值分析[J]. 金属学报, 2013, 49 (7): 797- 803
ZHAO Bo, WU Chuan-song, JIA Chuan-bao, et al Numerical analysis of the weld bead profiles in underwater wet flux-cored arc welding[J]. Acta Metallurgica Sinica Submitted, 2013, 49 (7): 797- 803
|
| 10 |
?ABANOWSKI J, FYDRYCH D, ROGALSKI G. Underwater welding: a review [J]. Advances in Materials Sciences, 2008, 8(3): 11-22.
|
| 11 |
王振民, 谢芳祥, 冯允樑 水下机器人局部干法焊接系统[J]. 焊接学报, 2017, 38 (1): 5- 8
WANG Zhen-min, XIE Fang-xiang, FENG Yun-liang, et al Underwater robot local dry welding system[J]. Transactions of the China Welding Institutution, 2017, 38 (1): 5- 8
|
| 12 |
HAMASAKI M, SAKAKIBARA J. Underwater dry TIG welding using wire brush nozzle [J]. Underwater Welding, 1983, 27-28: 139-146.
|
| 13 |
李尚周, 梅福欣, 李志明 水下TIG焊接的研究[J]. 华南理工大学学报: 自然科学版, 1984, (1): 83- 97
LI Shang-zhou, MEI Fu-xin, LI Zhi-ming A study on underwater TIGW elding[J]. Journal of South China University of Technology: Natural Science Edition, 1984, (1): 83- 97
|
| 14 |
古志明, 李尚周, 梅福欣 同轴式水下局部干法TIG电弧焊接[J]. 华南理工大学学报: 自然科学版, 1988, (3): 1- 8
GU Zhi-ming, LI Shang-zhou, MEI Fu-xin A study of local dry TIG underwater welding with coaxial vision way[J]. Journal of South China University of Technology: Natural Science Edition, 1988, (3): 1- 8
|
| 15 |
LYONS R S, MIDDLETON T Orbital t. i. g. system simplifies underwater welding[J]. Metal Construction, 1984, 16 (10): 627- 631
|
| 16 |
ZHAI Y, YANG L, HE T, et al Weld morphology and microstructure during simulated local dry underwater FCTIG[J]. Journal of Materials Processing Technology, 2017, 250: 73- 80
doi: 10.1016/j.jmatprotec.2017.07.010
|
| 17 |
GüLENC B, DEVELI K, KAHRAMAN N, et al Experimental study of the effect of hydrogen in argon as a shielding gas in MIG welding of austenitic stainless steel[J]. International Journal of Hydrogen Energy, 2005, 30 (13/14): 1475- 1481
|
| 18 |
朱加雷, 焦向东, 周灿丰. 不锈钢自动水下焊接工艺优化[J]. 上海交通大学学报, 2010(增1): 77-80.
ZHU Jia-lei, JIAO Xiang-dong, ZHOU Can-feng. Process optimization of stainless steel automatic underwater welding[J]. Journal of Shanghai Jiao Tong University, 2010(Suppl.1): 77-80.
|
| 19 |
YOSHIHIRO Y, TORUKAWANO K Underwater laser welding by 4 kW CW YAG laser[J]. Journal of Nuclear Science and Technology, 2001, 38 (10): 891- 895
doi: 10.1080/18811248.2001.9715111
|
| 20 |
ZHANG X, ASHIDA E, SHONO S, et al Effect of shielding conditions of local dry cavity on weld quality in underwater Nd: YAG laser welding[J]. Journal of Materials Processing Technology, 2006, 174 (1): 34- 41
|
| 21 |
GUO N, FU Y, XING X, et al Underwater local dry cavity laser welding of 304 stainless steel[J]. Journal of Materials Processing Technology, 2018, 260: 146- 155
doi: 10.1016/j.jmatprotec.2018.05.025
|
| 22 |
FINDLAN S J, FREDERICK G J. Underwater wet flux-cored arc welding development of stainless steel and nickel-based materials [M]. United States: American Welding Society, 1995.
|
| 23 |
张彤, 钟继光, 王国荣. 药芯焊丝微型排水罩局部干法水下焊接的研究[C]//第9次全国焊接会议. 哈尔滨: 中国机械工程学会焊接学会, 1999: 4.
ZHANG Tong, ZHONG Ji-guang, WANG Guo-rong. Study on the local dry underwater welding of flux-cored wire micro drainage device [C] // 9th National Welding Conference. Harbin: Welding Society of Chinese Society of Mechanical Engineering, 1994: 4.
|
| 24 |
刘桑, 钟继光, 张彤, 等 药芯焊丝水下焊接方法的研究[J]. 南昌大学学报: 工科版, 2000, 22 (2): 11- 15
LIU Sang, ZHONG Ji-guang, ZHANG Tong, et al Study on the method of underwater flux-cored arc welding[J]. Journal of Nanchang University: Engineering and Technology, 2000, 22 (2): 11- 15
|
| 25 |
王振民, 范文艳, 蒋春, 等. 基于DSC的全数字SiC逆变式多功能氩弧焊电源: CN205967754U [P/OL]. 2017-02-22. http://www.wanfangdata.com.cn/details/detail.do?_type=patent&id=CN201620880480.X.
WANG Zhen-min, FAN Wen-yan, JIANG Chun, et al. DSC-based full digital SiC inverter argon arc welding power supply: CN205967754U [P/OL]. 2017-02-22. http://www.wanfangdata.com.cn/details/detail.do?_type=patent&id=CN201620880480.X.
|
| 26 |
王振民, 范文艳, 谢芳祥. 一种适用于宽禁带功率器件的高效驱动电路: CN108173419A [P/OL]. [2018-02-11]. http://www.wanfangdata.com.cn/details/detail.do?_type=patent&id=CN201810141932.6.
WANG Zhen-min, FAN Wen-yan, XIE Fang-xiang. The utility model relates to an efficient driving circuit suitable for a wide bandgap power device: CN108173419A [P/OL]. [2018-02-11] . http://www.wanfangdata.com.cn/details/detail.do?_type=patent&id=CN201810141932.6.
|
| 27 |
蒋力培, 薛龙 全位置智能焊接机器人的研究[J]. 金属加工(热加工), 2008, (06): 30- 35
JIANG Li-pei, XUE Long Research on intelligent welding robot with full position[J]. MW Metal Forming, 2008, (06): 30- 35
|
| 28 |
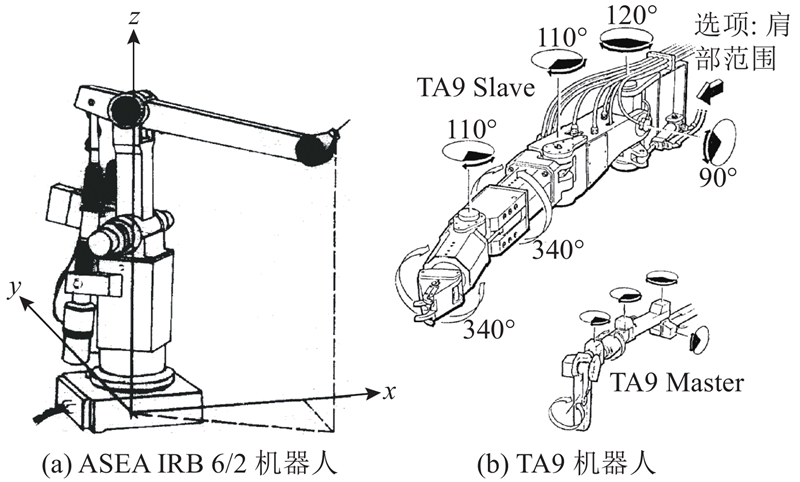
BUTKOVI? M, ?IGULI? R. Complex transfer function od the ASEA IRB L6/2 robot obtained numerically and experimentally [C] // Proceeding of 8th International Symposium on Measurement and Control in Robotics. Prague: Czech Technical University, 1998: 207-212.
|
| 29 |
周利, 刘一搏, 郭宁, 等. 水下焊接技术的研究发展现状 [J]. 电焊机, 2012, 42(11): 6-10.
ZHOU Li, LIU Yi-bo, GUO Ning, et al. Development status of underwater welding technology [J]. Electric Welding Machine, 2012, 42(11): 6-10.
|
| 30 |
SHI Y, WANG G, LI G. Adaptive robotic welding system using laser vision sensing for underwater engineering [C] // 2007 IEEE International Conference on Control and Automation. Guangzhou: IEEE, 2007: 1213-1218.
|
| 31 |
肖心远, 蒋波, 倪江忠, 等 基于极线约束的机器人双目视觉水下焊缝特征匹配研究[J]. 制造业自动化, 2012, 34 (10): 119- 123
XIAO Xin-yuan, JIANG Bo, NI Jiang-zhong, et al Research on underwater welding seam feature matching of robot binocular vision based on epipolar constraint[J]. Manufacturing Automation, 2012, 34 (10): 119- 123
doi: 10.3969/j.issn.1009-0134.2012.5(x).35
|
| 32 |
肖心远, 石永华, 王国荣, 等 机器人水下焊缝跟踪中双目立体视觉系统[J]. 焊接技术, 2009, 38 (01): 37- 40
XIAO Xin-yuan, SHI Yong-hua, WANG Guo-rong, et al Research on binocular stereo vision system of robot underwater seam tracking[J]. Welding Technology, 2009, 38 (01): 37- 40
doi: 10.3969/j.issn.1002-025X.2009.01.014
|
| 33 |
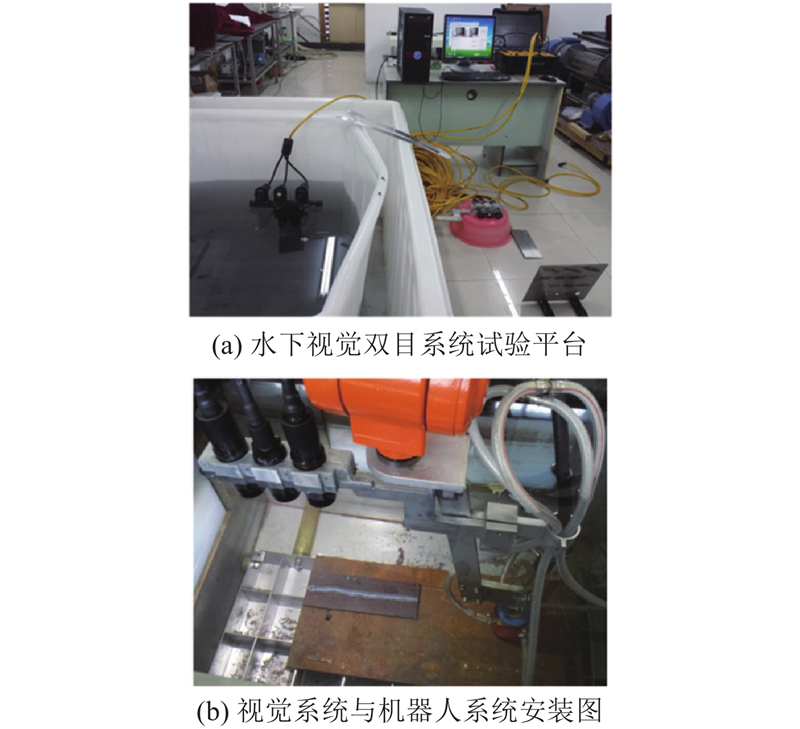
李盛前. 基于视觉技术的水下焊接机器人系统研究[D]. 广州: 华南理工大学, 2016.
LI Sheng-qian. Study on system of underwater welding robot based on vision technology [D]. Guangzhou: South China University of Technology, 2016.
|
| 34 |
HAMASAKI M, SAKAKIBARA J, ARATA Y Underwater mig welding-high-pressure chamber experiments[J]. Metal Construction, 1976, 8 (3): 108- 109
|
| 35 |
HAMASAKI M, SAKAKIBARA J, WATANABE M MIG welding underwater[J]. Welding Design and Fabrication, 1976, 49: 78- 80
|
| 36 |
KIELCZYNSKI W, LESINSKI K, PIATKOWSKI T Technologies and equipment for underwater welding and cutting[J]. Welding International, 1994, 8 (4): 257- 261
doi: 10.1080/09507119409548586
|
| 37 |
周凯, 李连波, 许威, 等 水下焊枪微型排水罩仿真计算与优化设计[J]. 石油矿场机械, 2013, 42 (01): 28- 31
ZHOU Kai, LI Lian-bo, XU Wei, et al Simulation analysis and optimize design of micro water-proof shroud for underwater welding-torch[J]. Oil Field Equipment, 2013, 42 (01): 28- 31
doi: 10.3969/j.issn.1001-3482.2013.01.007
|
| 38 |
高延峰, 胡翱 局部干法焊接排水罩的流场分析与优化设计[J]. 热加工工艺, 2016, 45 (11): 178- 180
GAO Yan-feng, HU Ao Flow field analysis and optimized design of local drain cover in local dry method welding[J]. Hot Working Technology, 2016, 45 (11): 178- 180
|
| 39 |
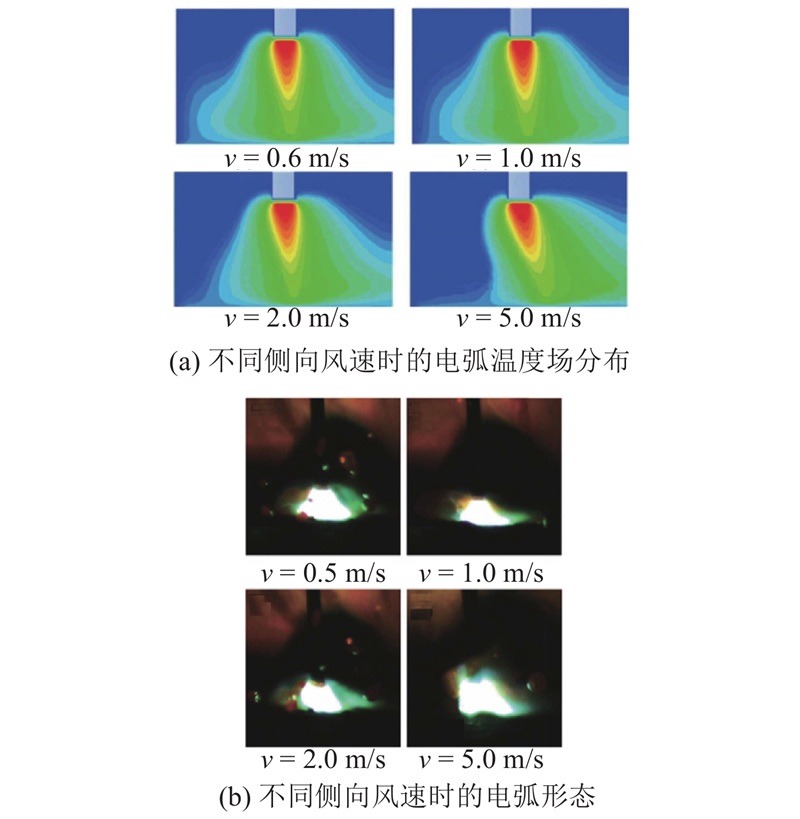
高延峰, 胡翱 排水罩风场特征及其对焊接电弧影响的数值模拟[J]. 焊接学报, 2017, 38 (8): 59- 62
GAO Yan-feng, HU Ao Numerical simulation of the characteristics of the drainage cover wind field and the effect on welding arc[J]. Transactions of the China Welding Institutution, 2017, 38 (8): 59- 62
|
| 40 |
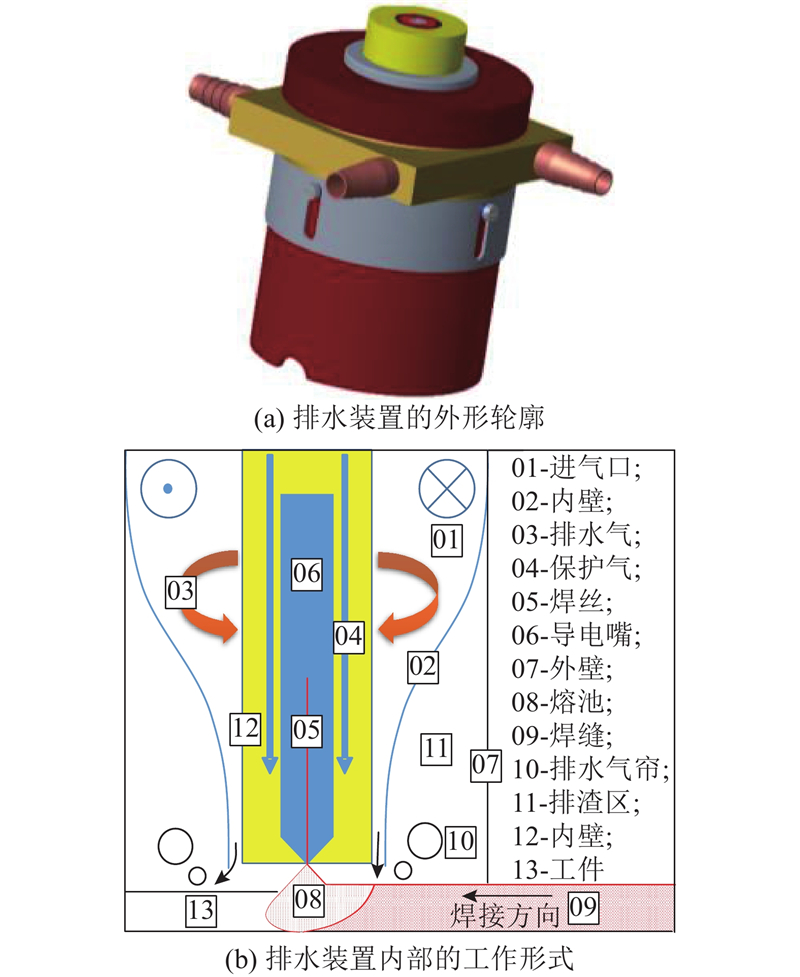
王振民, 谢芳祥, 朱磊. 双气流结构局部干法水下机器人焊接微型排水罩: CN106624258A [P/OL]. 2017-05-10. http://www.wanfangdata.com.cn/details/detail.do?_type=patent&id=CN201710047791.7.
WANG Zhen-min, XIE FANG-xiang, ZHU Lei. The underwater robot with double airflow structure and local dry method welds micro drainage cover: CN106624258A [P/OL]. 2017-05-10. http://www.wanfangdata.com.cn/details/detail.do?_type=patent&id=CN201710047791.7.
|
| 41 |
HAN L, WU X, CHEN G, et al Local dry underwater welding of 304 stainless steel based on a microdrain cover[J]. Journal of Materials Processing Technology, 2019, 268: 47- 53
doi: 10.1016/j.jmatprotec.2018.12.029
|
| 42 |
CHEN H, WU C. An algorithm of image processing for underwater range finding by active triangulation[J]. Ocean Engineering, 2004, 31(8): 1037-1062.
|
| 43 |
SCHECHNER Y Y, KARPEL N. Clear underwater vision [C] // Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington: IEEE, 2004: 536-543.
|
| 44 |
SCHECHNER Y Y, NAYAR S K. Uncontrolled modulation imaging [C] // Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington: IEEE, 2004: 197-204.
|
| 45 |
张为民, 钟碧良 基于最小二乘支持向量机的船舶水下焊接质量在线监测[J]. 中国造船, 2009, 50 (1): 117- 121
ZHANG Wei-min, ZHONG Bi-liang On-line monitoring of submerged weld quality of marines based on least squares support vector machines[J]. Shipbuilding of China, 2009, 50 (1): 117- 121
doi: 10.3969/j.issn.1000-4882.2009.01.016
|
| 46 |
HAMANN R, MAHRENHOLTZ O, BARTZSCH J. Temperature distribution of wet underwater welding: ISOPE [C] // The 2nd International Offshore and Polar Engineering Conference. San Francisco: ISOPE, 1992: 8.
|
| 47 |
RONDA J, MAHRENHOLTZ O, HAMANN R Thermomechanical simulation of underwater welding processes[J]. Archive of Applied Mechanics, 1992, 62 (1): 15- 27
doi: 10.1007/BF00786678
|
| 48 |
GHADIMI P, GHASSEMI H, GHASSABZADEH M, et al Three-dimensional simulation of underwater welding and investigation of effective parameters[J]. Weld Journal, 2013, 92 (8): 239- 249
|
| 49 |
CHEN H, GUO N, SHI X, et al Effect of water flow on the arc stability and metal transfer in underwater flux-cored wet welding[J]. Journal of Manufacturing Processes, 2018, 31: 103- 115
doi: 10.1016/j.jmapro.2017.11.010
|
| 50 |
GUO N, FU Y, WANG Y, et al Effects of welding velocity on metal transfer mode and weld morphology in underwater flux-cored wire welding[J]. Journal of Materials Processing Technology, 2017, 239: 103- 112
doi: 10.1016/j.jmatprotec.2016.08.019
|
| 51 |
GUO N, WANG M, DU Y, et al Metal transfer in underwater flux-cored wire wet welding at shallow water depth[J]. Materials Letters, 2015, 144: 90- 92
doi: 10.1016/j.matlet.2015.01.033
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|