

核燃料在反应堆中燃烧一段时间后由于铀的丰度不断降低而转变成为无法满足反应要求的乏燃料,这种乏燃料具有较强的放射污染性,须进行后处理. 为了防止辐射泄漏,乏燃料后处理的大部分工作是在热室内完成的. 热室采用低负压封闭且具有较厚的屏蔽结构,人无法直接进入. 因此在核工业热室环境中,智能装备取代人力完成乏燃料在主腔室及操作平台之间的快速转运并执行各种工作流程,另有遥操作机械臂负责智能装备的维护操作[1]. 智能装备的运动机构均由伺服电机提供动力. 在强核辐射作用下,伺服电机中使用的电子元件相较于机械传动部分更容易损坏,因此须通过遥操作机械臂对故障电机进行更换. 由于机械臂灵活性不如人工,须开发自动更换部件以满足遥操作要求. 自动更换技术在较大程度上影响了遥操作的质量、效率以及安全性.
电机的遥操作更换属于机器人自动化装配领域,其作业执行系统应具有较好的柔顺性及对装配环境的感知和适应性. 目前主要采用的有主动柔顺[2-8]和被动柔顺[9-15]2种方式. 主动柔顺方式是通过传感器感知装配的接触信息,从而执行相应动作或改变策略. Hogan[16]首次提出阻抗控制的概念,对主动柔顺控制的发展产生深远影响,其装配精度主要取决于控制算法对环境的识别程度. Singh等[17]将神经网络算法加入到控制算法中,提出智能柔顺控制策略. 主动柔顺对冲击碰撞、装配环境变化较为敏感,须进行大规模实验以修正算法策略. 被动柔顺方式凭借柔顺机构,使系统具有一定的柔顺性. 最典型的应用是Whitney等[18]研制的远程中心校准装置(remote center compliance,RCC),但该装置垂直承载能力较差. Cutkosky等[19]设计出参数可调的远中心柔顺装置(variable remote center compliance,VRCC),其柔顺点位置可以根据装配件调节.
遥操作机械臂采取人工控制且电机的更换对初始定位精度要求高,采用被动柔顺技术可以调整部件的相对位姿,顺应消除装配位置误差,最终完成装配作业. 本研究提出基于柔顺装配的电机自动更换方法,采用被动柔顺机理,遥操作机械臂操作,可以快速分离故障电机和智能装备,使备用电机在相对较大的初始位姿误差范围内实现自动入位、位置固定、电气连接和动力对接.
1. 被动柔顺电机更换机理分析
1.1. 电机遥操作更换设计需求
图 1

图 1 2种电机连接形式
1-电机;2-螺栓;3-联轴器;4-减速器;5-电机组件;6-柔性齿轮联轴器;7-固定组件 Two kinds of motor connection forms
电机遥操作更换结构由安装在减速器输入端的固定组件和安装在电机输出端的电机组件构成,固定组件对接面设计为孔状结构,电机组件对接面设计为轴状结构,两者的插配对接形成孔轴装配约束. 固定组件与减速器安装构成固定模块,电机组件与电机安装构成电机模块. 当电机损坏须更换时,先通过遥操作机械臂将电机模块作为整体拆下,再将备用的电机模块吊装至固定模块上方,进行对接工作.
电机遥操作更换结构的主要功能要求如下:1)电机遥操作更换结构对接,电机模块借助遥操作机械臂可以与固定模块完成垂向插配,再完成电气连接,最终实现电机轴与传动轴系间的动力对接;2)电机遥操作更换结构分离,电机模块可以与固定模块快速分离,此过程无需人力介入;3)使用环境,在封闭的热室环境内运行,所处环境有一定的核辐射剂量.
1.2. 电机遥操作更换方法
1.2.1. 电机机体垂向插配策略
采用遥操作机械臂进行电机组件和固定组件的精确对接,由于机械臂的空间定位精度远小于电机组件和固定组件的配合精度,须借助柔顺机构实现装配,本研究采用孔轴被动柔顺装配技术,对电机组件的姿态和位置能够进行自动调整以满足孔轴插配要求,工作原理如图2所示. 被动柔顺机构与电机固定安装,电机组件固定安装在电机输出端,固定组件安装在减速器输入端,减速器则固定安装在装备平台上.
图 2

图 2 电机遥操作更换原理图
1-被动柔顺机构;2-电机;3-减速器;4-电机组件;5-固定组件 Schematic diagram of remote handling motor replacement
固定组件与电机组件的插配设计借鉴孔轴的装配过程,固定组件设计为孔状结构,电机组件设计为带倒角的轴状结构,两者插配的力学模型可以简化为孔轴的装配过程. 在实际情况下,电机组件的位置误差和姿态误差同时存在,电机组件由柔顺机构支撑并被缓慢均匀地插入固定组件. 若柔顺机制有效,整个过程须经历4个阶段:接近过程、倒角滑移、单点接触、两点接触,如图3所示.
图 3

电机垂向插配过程通过遥操作机械臂完成,如图4所示. 在安装电机前,机械臂先将损坏电机、电机组件和被动柔顺机构吊起移出,再抓取备用电机的被动柔顺机构到固定组件正上方并下移,随后进入插配过程. 在插配期间,被动柔顺机构承受固定组件对电机组件的作用力,以调整电机组件的姿态和位置,最终使插配顺利进行.
图 4

图 4 电机遥操作更换现场示意图
1-遥操作机械臂;2-电机组件;3-固定组件;4-智能装备移动底座;5-遥操作机械臂移动底座;6-智能装备平台 On-site schematic diagram of remote handling motor replacement
1.2.2. 动力对接策略
在电机组件和固定组件插配对接后,须实现动力对接,完成电机轴和传动轴系间的动力传递. 动力对接原理如图5所示,柔性齿轮联轴器的内齿轮壳体和电机组件通过弹簧相连,与电机轴构成滑动副,在外力作用下可以上移,避免刚性碰撞.
图 5

图 5 动力对接原理图
1-弹簧;2-柔性齿轮联轴器;3-固定组件;4-电机轴;5-电机组件;6-正齿轮(减速器输入端) Schematic diagram of motion docking
动力对接过程如图6所示,电机组件下降,齿轮联轴器的内齿轮壳体被向上推动,当电机组件和固定组件到位后,启动电机,因为齿侧间隙的存在,柔性齿轮联轴器的内齿轮壳体在弹簧的推动下复位,完成动力对接. 此设计也可以保障自动拆卸电机时轴系间的快速分离.
图 6

1.3. 电机垂向插配力学模型
为了建立电机垂向插配力学模型,须对固定组件与电机组件的装配过程进行一定程度的简化. 根据设计原理,进行以下合理假设:1)动力对接安排在电机模块垂向插配后,因此,决定插配力的是轴孔配合关系,不考虑动力对接的接触力;2)柔顺机构轴线的弹性特性是各向同性的;3)在插配过程中假定电机组件(轴)和固定组件(孔)为刚体,电机组件(轴)的小位移和旋转来自弹性部件在柔顺机构中的弹性变形;4)将插配过程视为准静态平衡过程,忽略相对加速运动产生的惯性力,重力作用不影响装配误差,转化为一部分插配力.
根据上述假设,电机组件和固定组件的柔顺装配过程可以简化为如图7所示的二维模型. 图中,Kh为柔顺机构和电机间的水平刚度,Kr为柔顺机构和电机间的旋转刚度,L为电机组件圆柱面的底端到柔顺机构中心的距离,x0为柔顺机构的轴线与固定组件的轴线之间的初始水平误差,θ0为电机组件和固定组件中心轴线之间的初始角度误差,r为电机组件的半径,R为固定组件的孔半径,W为倒角的深度,α为倒角的角度.
图 7

根据电机组件和固定组件之间的相对位置,整个装配过程包含4个阶段. 在接近过程中,电机组件和固定组件没有接触,无须考虑电机组件在插入之前的位置和受力情况,因此,对装配过程的后3个阶段进行分析.
1.3.1. 倒角滑移状态
假设初始水平误差x0在轴中心线左侧为正,初始角度误差θ0绕轴尖顺时针旋转为正. 根据x0和θ0之间的正负关系,有4种可能的接触情况,不过这4种情况的力学特性均相同,因此仅讨论x0和θ0均为正的情况,如图8所示.
图 8
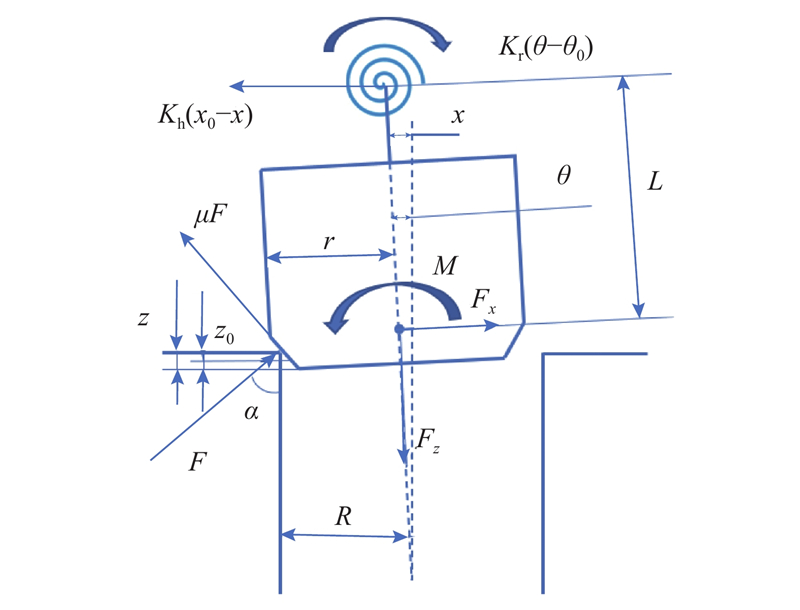
首先推导得到几何方程式:
式中:x为水平误差,θ为角度误差,z为插入深度,z0为初始插入深度.
定义F=[Fx, Fz, M]T为由被动柔顺机构施加到轴上的组装力,得到力平衡方程组:
式中:Fx为横向力,Fz为插配力,M为组装力矩,F为接触点法向力,μ 为摩擦系数.
根据柔顺装置变形,推导出Fx、M:
由式(1)~(3),倒角滑移阶段的组装力表达式为
式中:
插配力Fz与插入行程z的关系如下:
1.3.2. 一点接触状态
与倒角滑移状态相似,由θ和x的正负关系进行划分,仅分析两者均为正的情况. 当经过倒角接触阶段后,一点接触状态的力学模型如图9所示. 图中,F1为左侧接触点法向力,z1为一点接触状态的插入深度.
图 9
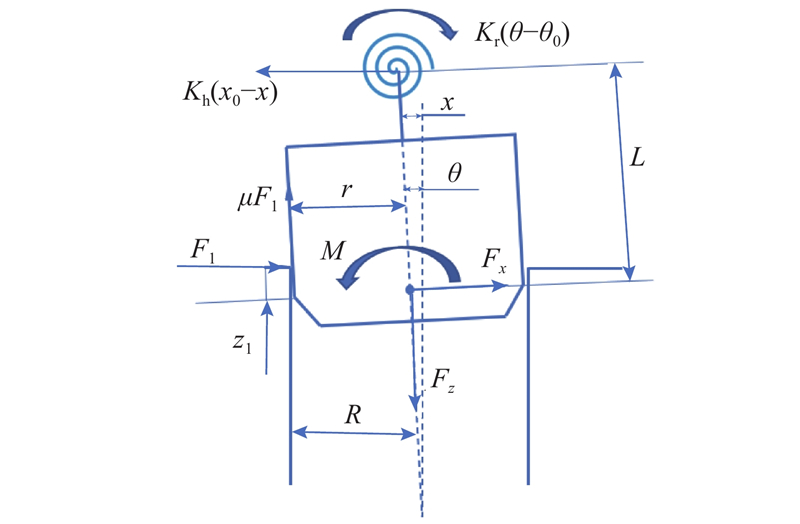
几何方程式:
力平衡方程组:
Fx和M方程与式(3)相似,联合式(3)、(8)、(9),得出一点接触的组装力的表达式:
式中:
当一点接触时,插配力Fz与插入行程z1的关系为
1.3.3. 两点接触状态
图 10

几何方程式:
力平衡方程组:
Fx和M与式(3)相同,结合(3)、(13)、(14),可以推导出两点接触过程中组装力的力学表达形式:
式中:
综上,可以得到插配力的表达式:
将式(14)~(16)结合起来,推导出两点接触期间θ的表达式:
将式(13)代入式(18)中,得到两点接触状态的起始深度:
式中:
1.3.4. 不同行程下的插配力
根据式(7)、(12)、(17),整个电机遥操作更换过程中的插配力Fz可以用分段方程描述,包含倒角滑移、一点接触、两点接触3个状态:
式中:G=z−W,H=R−r,M=2H/G,N=μ/G,LMAX为最大插入深度.
1.4. 五自由度被动柔顺机构原理设计
为了满足电机组件垂向插配的配合精度要求,设计被动柔顺机构,在插配过程中自动调整电机组件的姿态和位置. 该机构的机械原理图如图11所示,其与电机固定安装,机械臂抓取该被动柔顺机构,完成整个插配过程. 图中,P1、P2为平行移动副,S1为球面副.
图 11

图 11 5-DOF被动柔顺机构原理图
Fig.11 Schematic diagram of 5-DOF passive compliant mechanism
该被动柔顺机构包含8个移动副(RP)和1个球面副(RPS). 机构的总自由度按照修正的Kutzbach-Grubler公式计算:
式中:n为总构件数,n=3;m为运动副总数量,m=9;fi为第i个运动副的相对自由度,平行移动副(RP)的相对自由度为1,球面副(RPS)的相对自由度为3;μc为过约束总数,μc=36. 该机构自由度Ff=5,即5-DOF. 该机构只有垂直方向的平移受限,因此有2个X、Y方向平动自由度和球铰3个转动自由度.
2. 电机更换结构设计和工作流程
2.1. 总体结构设计
电机遥操作更换结构的总体设计如图12所示,伺服电机与电机组件固定安装,构成电机模块. 减速器与固定组件固定安装,构成固定模块. 若伺服电机损坏,机械臂将拆卸电机模块,并抓取备用的电机模块进行遥操作更换.
图 12

图 12 电机遥操作更换总体结构设计
1-机械臂抓手;2-伺服电机;3-电机组件;4-固定组件;5-减速器 Structure design of remote handling motor replacement device
在整个电机遥操作更换过程中,电机模块作为整体被安装,其组件与固定模块的对应组件完成自动矫正位置误差、位置固定、电气连接和动力对接的任务. 热室外的工作人员由机械臂的摄像头监控整个流程,完成相应操作.
2.2. 5-DOF被动柔顺机构的结构设计
5-DOF被动柔顺机构主要由底座、水平移动平台、球铰座、弹性支撑装置和夹持块组成,如图13所示. 夹持块用于机械臂夹爪的夹取操作,夹持块下部安装球头,与球铰座构成球铰. 球铰座安装在水平移动平台上固定,后者依靠2组导向杆与底座相连. 弹性支撑装置包含3对弹簧组:水平方向上的2对弹簧组的水平刚度均为Kh;垂直方向上的1对弹簧组的旋转刚度为Kr. 由式(21)可知,Kh和Kr是插配力Fz的重要影响因素,选择合理的Kh和Kr可以减小插配力Fz.
图 13

图 13 柔顺机构结构图
1-水平移动平台;2-水平刚度弹簧;3-夹持块;4-旋转刚度弹簧;5-球铰座;6-柔顺机构底座;7-导向杆 Structure diagram of compliant mechanism
采用Matlab建立全局仿真环境,设定系统初始参数:假设旋转刚度Kr=106 N·mm/rad,水平刚度Kh=10 N/mm,其他属性如表1所示. 模拟机器臂的整个插配过程,观察插配力Fz的变化规律,以确定Kh和Kr.
表 1 Matlab仿真初始参数
Tab.1
| 孔轴参数 | 数值 | 装配参数 | 数值 | 实验参数 | 数值 | ||
| 2R | 90 mm | W | 10 mm | x0 | 4 mm | ||
| 2r | 89.96 mm | α | 1/3 rad | θ0 | 0.05 rad | ||
| L | 373 mm | LMAX | 50 mm | μ | 0.15 |
图 14

图 15

2.3. 电机组件的结构设计
电机组件如图16所示,由电机保持架、导向法兰、柔性齿轮联轴器和电气连接器等零件组成,与5-DOF被动柔顺机构和电机构成电机模块. 电机组件承担导向定位、电气连接和动力对接的任务. 导向法兰的锥形倒角、圆柱面、端面和导向平键,负责导向定位,最终与固定组件形成完全约束. 导向平键还负责承载电机的转动力矩. 电气连接由电气连接器、电气连接器限位装置和电气连接器柔性底座实现. 柔性齿轮联轴器用于动力对接和电机动力传递,柔性齿轮联轴器的输入轴通过膜片联轴器与电机轴连接,膜片联轴器可以补偿电机轴、齿轮联轴器和减速器轴间的偏差. 柔性齿轮联轴器的内齿轮壳体与膜片联轴器之间设计弹簧以提供动力对接的驱动力,也避免在电机模块垂向插配过程中,电机轴受刚性冲击造成损伤.
图 16

图 16 电机组件结构图
1-电气连接器限位装置;2-电气连接器柔性底座;3-电气连接器(公头);4-导向平键;5-柔性夹持块;6-电机保持架;7-伺服电机;8-导向法兰;9-柔性齿轮联轴器 Structure diagram of motor component
2.4. 固定组件的结构设计
固定组件如图17所示,主要由定位法兰、正齿轮和锁销组成. 定位法兰端面设计V型导向槽,便于导向平键进入,定位法兰内圆柱面用于电机组件精定位. 正齿轮与减速器输入轴刚性连接,在电机组件与固定组件正常对接状态下,柔性齿轮联轴器的内齿轮壳体与正齿轮套合,用于传递扭矩. 电气连接器(母头)与电机模块的电气连接器(公头)连接,用于电机供电和控制. 锁销实现锁紧功能,使电机模块整体固定于固定模块上,防止电机模块在地震或者意外撞击情况下脱落,造成损失.
图 17

图 17 固定组件结构图
1-锁销;2-电气连接器(母头);3-定位法兰;4-正齿轮;5-减速器 Structure diagram of fixed components
2.5. 电机遥操作更换工作流程
整个电机遥操作更换过程由人工控制遥操作机械臂抓手完成,首先拆除已损坏的故障电机,然后安装新的备用电机,两者类似于逆向操作. 安装新电机的流程如图18所示,共分为4个阶段:电机组件和固定组件插配对接(导向定位)、电气连接器对接、锁销锁紧(位置固定)和动力对接.
图 18

1)机械臂夹爪夹取电机模块运动至固定模块上方,调整导向法兰位置至定位法兰正上方;夹爪向下运动,电机组件和固定组件开始插配过程,5-DOF被动柔顺机构自动矫正电机组件和固定组件间的位姿偏差,导向法兰与两侧平键共同完成两模块间的精确定位;夹爪持续下降至导向法兰与定位法兰端面接触并紧密贴合,如图19所示.
图 19

2)机械臂夹爪移动至电气连接器(公头)处,向下拨动电气连接器(公头),至其与电气连接器(母头)连接;夹爪移动至锁销处,推动锁销,锁销锁紧,至此完成电机模块和固定模块间的位置固定.
3)进行动力对接过程. 如图20(a)所示,在电机组件垂向插配后期,柔性齿轮联轴器的内齿轮壳体下端面与减速器输入端正齿轮的上端面接触受阻,内齿轮壳体停止下移,导致弹簧压缩,柔性齿轮联轴器的内齿轮壳体受弹簧垂直向下的推力为
图 20

式中:l0为弹簧自由长度,zs为弹簧压缩后的长度,kt为弹性系数.
图 21

3. 实验测试
根据电机遥操作更换机理分析和结构设计,结合电机本身的结构特点和安装要求,课题组设计制造电机遥操作更换实验装置,在车间内搭建实验平台,实验现场如图22所示. 利用桁架机器人在工作台上进行电机遥操作更换,机器人腕部与夹爪之间装有力传感器,用于检测插配力.
图 22

实验测试电机遥操作更换流程的各项操作,统计分析电机遥操作更换成功率、插配力和操作耗时等实验数据,为方案的拓展应用打下基础. 实验装置的各项参数如表2所示. 表中,m0为电机模块的自重.
表 2 电机遥操作更换装置的各项参数
Tab.2
| 孔轴参数 | 数值 | 装配参数 | 数值 | 实验参数 | 数值 | ||
| 2R | 90 mm | W | 10 mm | x | 0~6 mm | ||
| 2r | 89.96 mm | α | 1/3 rad | θ | 0~0.05 rad | ||
| L | 373 mm | LMAX | 50 mm | m0g | 153 N | ||
| μ | 0.15 | z | 0~50 mm | z0 | 0 mm |
3.1. 针对电机遥操作更换流程的测试项目
在电机遥操作更换实验中,桁架机器人依次进行各项操作,执行如图21所示的工作流程. 为了判定各项操作是否成功,针对单次电机遥操作更换实验,对3个基本项目进行测试:电机模块导向定位测试、电气连接测试和柔性齿轮联轴器传动测试. 在电机遥操作更换流程中,电机模块和固定模块的法兰端面紧密贴合,锁销可以锁死固定两者位置,则通过电机模块导向定位测试;机械臂抓手可以一次性完成电气连接器的对接,则通过电气连接测试;在启动电机后,若柔性齿轮联轴器无异响,减速器输出轴稳定转动,则通过柔性齿轮联轴器传动测试. 将一次性通过这3项测试定义为单次电机遥操作更换成功.
3.2. 电机遥操作更换成功率及误差容忍度分析
整个装置的可靠性通过电机遥操作更换成功率进行量化. 此外,柔顺机构有一定的初始误差容忍极限,若电机模块和固定模块的初始位姿误差超出柔顺机构的自动矫正范围,电机模块会出现卡阻现象,无法完成装配. 即使柔顺机构成功完成矫正工作,其他2个基本项目测试的任何一项无法通过,本次电机遥操作更换即判定为失败. 取电机的初始角度误差θ0=0.05 rad,初始水平误差x0=−6~6 mm,在每个位置进行10次电机遥操作更换操作,统计成功概率如图23所示. 图中,Ps为成功率.
图 23

实验装置的电气连接器是Lemo插拔自锁连接器,电气连接在电机组件垂向插配完成后进行,电气连接器公头和母头间的位置关系已经由电机遥操作更换结构约束,因此连接质量较好. 实验中出现的卡阻现象,发生在电机垂向插配的两点接触状态,桁架机器人具备力反馈功能,当操作员感知到插配力过大时,须立即停止当前操作,通过上移电机,适当调整电机初始位姿,重新进行电机更换操作.
由图可见,水平误差在4 mm以内可以保障90%以上的成功率,当水平误差突破5 mm后,电机遥操作更换成功率急剧下降至50%以下. 据统计,电机遥操作更换平均耗时5.5 min,电机拆卸平均耗时4.8 min,拆装平均耗时10.3 min. 由于核工业热室内充斥强放射性物质,若采用人工进入热室进行电机拆换操作,那么维修人员在进入前须先穿上防护气衣,这样一来,穿衣、电机拆除和安装等会导致整个电机更换过程耗时几个小时[20].
3.3. 插配力检测
针对1.3节建立的电机垂向插配力学模型,用实验装置对插配力计算方法的准确性进行验证. 根据如表2所示的实验装置各项属性和式(21)建立的插配力和插入深度之间的关系,取初始水平误差x0=4 mm,角度误差θ0=0.05 rad,由Matlab仿真得到3种接触状态下的插配力理论值:
在实验环境下,电机设计成垂直安装形式,电机模块自重转化为一部分插配力,因此机械臂上力传感器检测的实际插配力可以表示为
在上述条件下,使用实验装置进行3次实验,由机械臂上的力传感器检测实际插配力Fs,与理论计算值进行对比,如图24所示. 图中,浅色各线型为3次实验测得的实际插配力,深色线为理论计算值,AB段为倒角滑移状态,BC段为一点接触状态,CD段为两点接触状态.
由图可以看出,3次实验的实际插配力从点A开始缓慢上升,到BC段的一点接触状态出现小幅振荡,随后从点C开始迅速增大并伴随振荡过程达到峰值,最后插配力振荡下行至点D. 各组实验的实际插配力在−187~171 N波动,理论插配力在−153~194 N波动,实际插配力变化区间与理论预测区间相差小于10%.
由实验结果可以看出,电机垂向插配力学模型对插配力进行了合理预测,电机模块的自重转化为一部分插配力,协助整个插配过程. 在实际插配过程中,振荡较明显,可以采用承载更大的机械臂,并增加阻尼单元以提高系统的整体性能,在设计柔顺机构的刚度参数时,须考虑安全裕度.
图 24

4. 结 论
(1)提出新型电机遥操作更换结构,基于孔轴被动柔顺装配机理,对电机组件、固定组件和5-DOF空间被动柔顺机构进行原理设计,提出动力对接策略.
(2)建立整个电机垂向插配过程不同阶段的力学模型,确定插配力和插入深度间的关系,合理简化真实模型,对插配力的变化区间进行有效预测.
(3)对电机组件、固定组件和5-DOF被动柔顺机构等功能结构具体设计了机械结构,利用模块化设计解决备用电机准确入位、位置固定、电气连接和动力对接的难题,提出完整的电机遥操作更换工作流程.
(4)研制电机遥操作更换实验设备,分析成功率、平均耗时和实际插配力. 实验结果表明,所设计的电机遥操作更换结构对初始误差容忍度较高,电机遥操作更换成功率高于90%,拆装平均耗时10.3 min,实际插配力变化区间与理论预测区间相差小于10%.
本研究的电机遥操作更换机理和结构设计适用于复杂、多任务的自动化装配情景,实用价值较高. 以后的研究方向是对电机遥操作更换过程中的卡阻现象进行分析,完善力学模型,对遥操作更换结构进一步优化,减轻设备自重.
参考文献
基于力/位混合控制的工业机器人精密轴孔装配
[J].
Industrial robot high precision peg-in-hole assembly based on hybrid force/position control
[J].
Generalized impedance control of robot for assembly tasks requiring compliantmanipulation
[J].
Adaptive hybrid control strategies for constrained robots
[J].DOI:10.1109/9.250529
Learning hybrid force and position control of robot manipulators
[J].
机器人装配作业的主被动复合柔顺
[J].
Active passive compound compliance in the robotic assembly process
[J].
机器人柔顺装配的几何及力学分析研究
[J].DOI:10.3321/j.issn:0577-6686.1995.06.015
Research on geometric and mechanical analysis of robot compliant assembly
[J].DOI:10.3321/j.issn:0577-6686.1995.06.015
Error modeling and sensitivity analysis of a parallel robot with SCARA (selective compliance assembly robot arm) motions
[J].DOI:10.3901/CJME.2014.0423.082
Quasi-static assembly of compliantly supported rigid parts
[J].
基于凸多面体边界元的接触状态判断
[J].DOI:10.3321/j.issn:0577-6686.2005.01.011
Judging assembly contact states based on boundary components of convex polyhedron
[J].DOI:10.3321/j.issn:0577-6686.2005.01.011
Design of an orthogonal compliance for polygonal peg insertion
[J].
Impedance control: an approach to manipulation: Part I-Theory
[J].DOI:10.1115/1.3140702 [本文引用: 1]
Stability analysis of robust adaptive hybrid position/force controller for robot manipulators using neural network with uncertainties
[J].DOI:10.1007%2Fs00521-012-0966-6 [本文引用: 1]
Mechanical behavior and design equations for elastomer shear pad remote center compliances
[J].DOI:10.1115/1.3143771 [本文引用: 1]
Active control of a compliant wrist in manufacturing tasks
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}