

相对于风力发电,海流能发电的介质是海水[5],在获得高能量密度比优势的同时,对机组结构强度、可靠性、稳定性等提出了更高的要求.
目前的变桨控制理论主要有以下2个方向. 1)功率控制. 降低机侧发电功率抖动,使得对电网的冲击尽量减小,实现可靠供电. 2)载荷控制. 以机组使用寿命最大化(主要是叶轮疲劳寿命)为目标,尽可能消除叶轮坐标系中3个弯矩方向的不平衡载荷. 目前综合上述2个方向的海流能变桨控制理论研究及公开文献甚少,刘宏伟等[6]针对海流能机组的载荷控制提出可行方案,但是缺乏关于功率稳定的讨论和研究. 在实际的运行场景中,这两个方向都是应该尽量满足的. 本文结合上述2个方向,率先给出比较有效的解决方案,既解决了功率稳定的问题,又降低了各叶片的叶根弯矩.
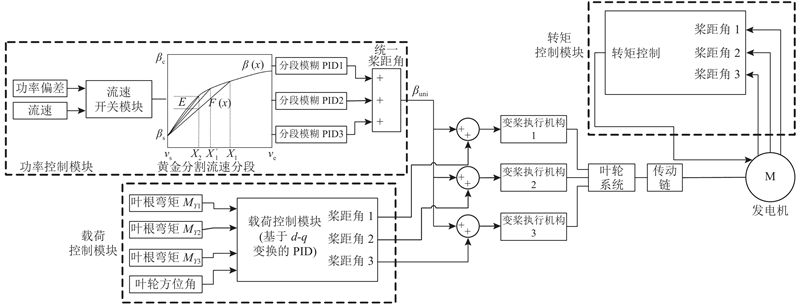
本文聚焦于稳态功率的稳定和叶片叶根处弯矩的降低这2个方面,提出将基于黄金分割法分段模糊PID的功率控制和基于d-q变换[7]的弯矩控制作为水平轴海流能机组独立变桨控制策略. 功率稳定性控制以模糊PID控制为基础,根据流速/最佳桨距角曲线,采用黄金分割法,在流速区间上进行针对性分段,对每一段采用指定参数进行细粒度控制,以实现精准、有效的功率控制方案. 在载荷方面,叶根作为叶轮系统中极限应力的关键位置,对于整个叶轮的应变和疲劳寿命有着很重要的影响. 该方案针对叶根弯矩(对俯仰力矩和偏航力矩均有贡献)的最小化进行控制,效果显著.
1. 海流能机组理论建模
1.1. 叶轮功率捕获原理
依据动量理论(见图1),本质上可以将叶轮当成致动盘,流体流经这个致动盘的同时会形成压降. 该压降使得致动盘产生动能,从而推动叶轮转动. 具体的功率P表示为
图 1
式中:
1.2. 叶轮系统叶根载荷分析
根据叶素原理,设叶轮转速为
图 2

式中:
将升力和阻力投影到轴向和切向方向,得到弯矩
根据叶素中的升力和阻力,进行积分求解,将合力投影到叶片坐标系中的3个方向,得到每个叶片叶根关于挥舞方向和摆振方向的弯矩:
式中:
叶根弯矩直接和入流角相关,入流角取决于桨距角β,所以通过控制桨距角能够完成叶根载荷的调节.
2. 协同变桨控制原理
在功率控制环节,提出基于黄金分割法的分段模糊PID控制,克服了传统PID的一些不足. 1)迁移性较差. 一旦环境参数发生变化,可能导致控制效果急剧下降. 2)控制精度不够细化. 轻微的参数调整可能引起响应的巨大抖动.
模糊控制[8]有着较好的自适应性, FuzzyPID的优势在于其类似于一个专家系统,对于输入,根据经验,给出适合的控制策略,能够自动整定PID的各个参数,实现较好的迁移性.
2.1. 基于模型的桨距角优选
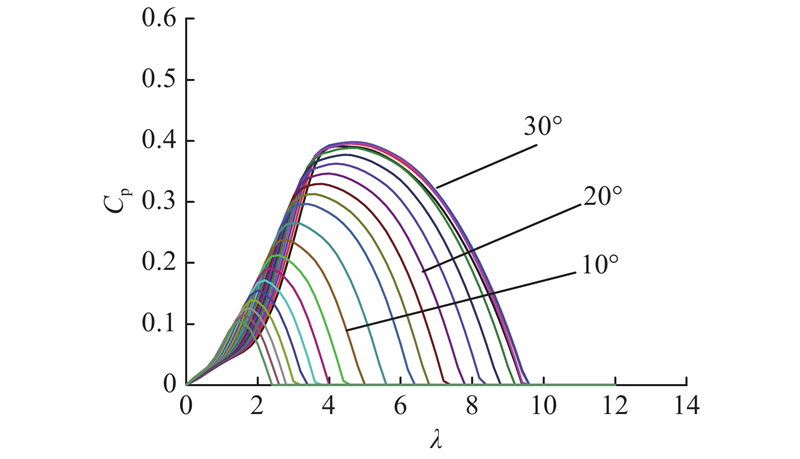
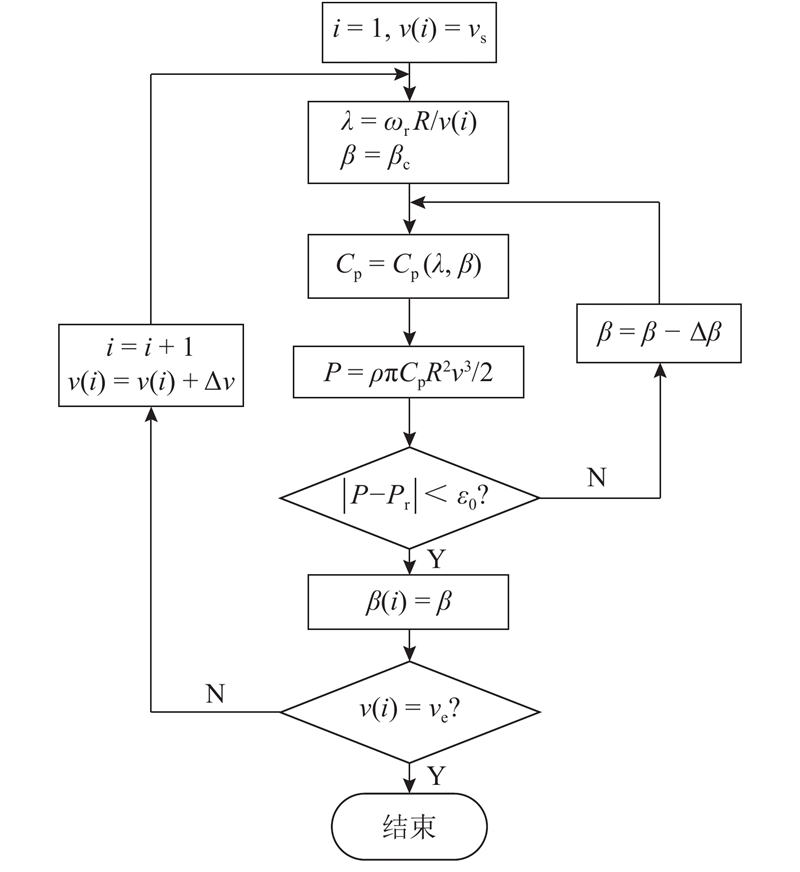
执行的步骤如图3所示,步骤主要如下. 1)选定流速区间[vs,ve]. 2)从指定的桨距角开始进行尝试,根据机组的Cp曲线,计算和额定功率的功率误差,根据误差决定是选取还是继续向下尝试. 3)在右边界速度的目标桨距角选取之后,完成记录. 4)将流速和桨距角之间的数学关系拟合成多项式表达,即β(x).
图 3
2.2. 黄金分割法分段控制
图 4
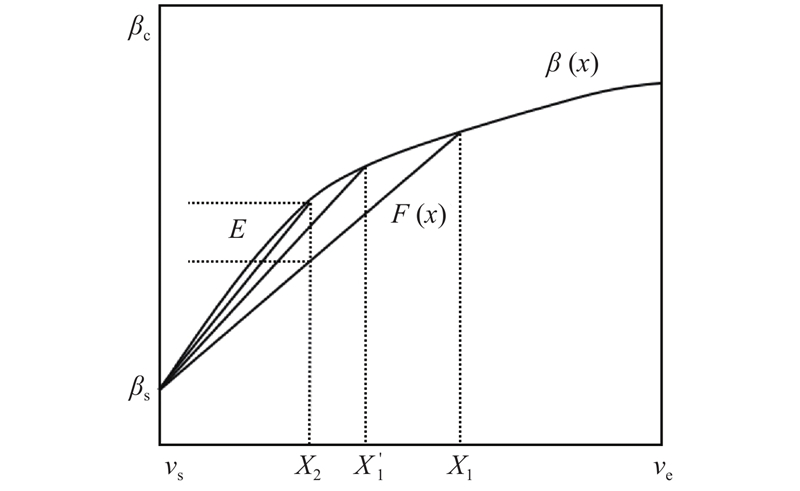
图 5
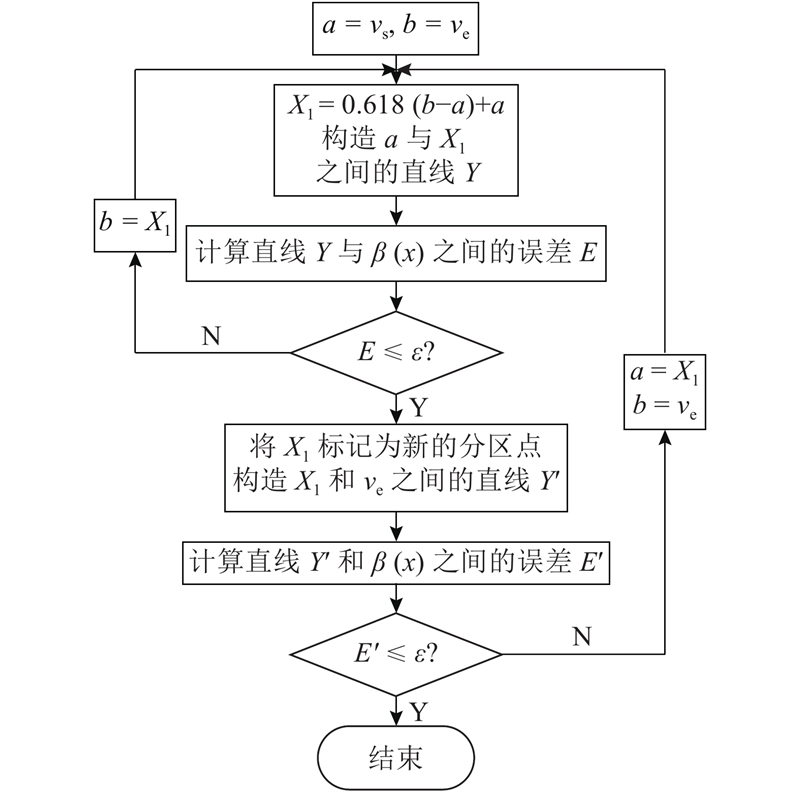
图 5 黄金分割法分割流速区间过程
Fig.5 Process of dividing velocity interval by golden section
控制策略是借鉴电气控制上的d-q变换,将原来3个维度的叶根弯矩,经过矩阵变换,转换成d-q轴上的弯矩;利用相应的控制算法,采用PID控制,在减小计算量的同时兼顾了控制效果.
图 6

图 7
3. 仿真建模
3.1. 模型参数
以600 kW水平轴三叶片海流能机组为对象,针对正常启动工作状态下的机组,采用独立变桨控制. 整个模型的基本参数如表1所示.
表 1 机组基本信息
Tab.1
| 参数 | 数值 |
| 额定功率 | 600 kW |
| 叶轮直径 | 16 m |
| 桨距角 | 0~90° |
| 发电机额定转矩 | 19 108 N·m |
| 发电机额定转速 | 300 r/min |
3.2. 仿真控制结构
Matlab负责逻辑控制,Bladed负责水动力学建模. 工作流程如下. 在Bladed中设置基本的模型参数:叶片信息、传动链、外部控制器地址等;在Simulink中编写控制逻辑和通信程序;运行Bladed和Simulink开展仿真,得到仿真结果. 提出基于黄金分割的功率与载荷协同控制,按照功能分成3个部分:基本PID转矩控制模块、基于黄金分割的分段Fuzzy PID功率控制控制模块、基于d-q变换及反变换的叶根弯矩控制模块. 如图8所示,最上部分是转矩控制,中间包含interval_switch的部分是应用黄金分割法的功率控制,最下部分包含Load Control框的是载荷控制.
图 8
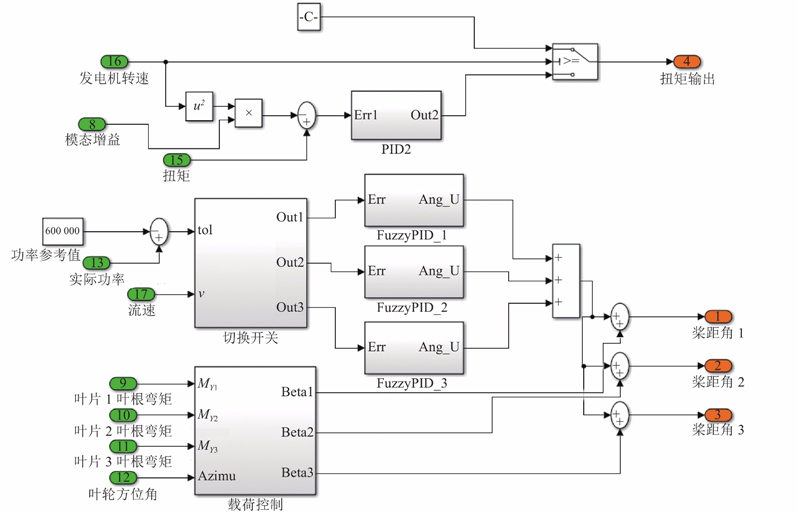
图 8 基于黄金分割的功率与载荷协同控制逻辑框图
Fig.8 Logic block diagram of power and load cooperative control based on golden section
3.3. 仿真结果
以统一变桨的标准PID(以下简称统一变桨控制)控制和引入基于dq控制的标准PID控制(以下简称dqPID控制)作为参照组,和提出的方法(以下简称双目标协同控制)进行比较. 围绕功率和叶根载荷2个指标进行比较,对不同流速段的效果进行探究.
1)统一变桨控制和双目标协同控制对比.
功率方面:相对于统一变桨控制, 双目标协同控制有效地缓解了功率波动,稳态误差明显降低,缺点是在启动阶段可能引起一定的超调量上升.
图 9
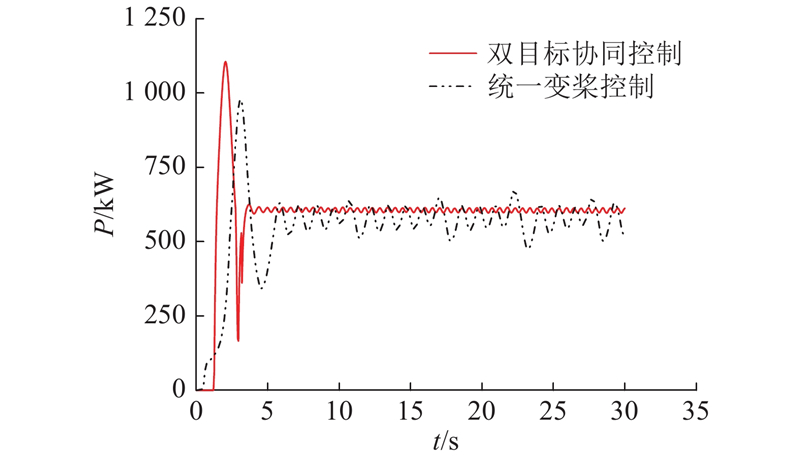
图 10
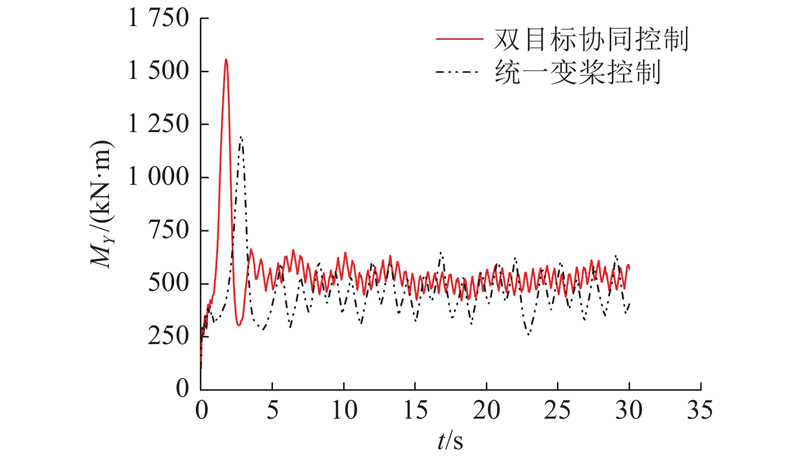
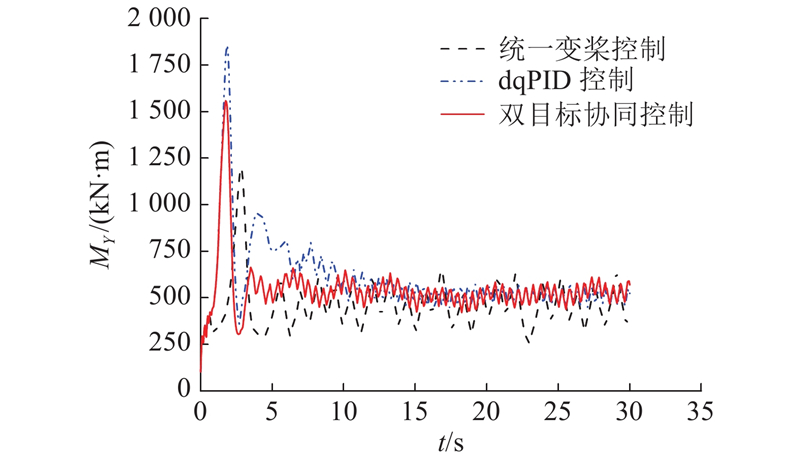
图 10 与统一变桨控制叶根弯矩的对比
Fig.10 Comparison of root moment with uniform pitch control
2)在统一变桨的基础上,引入基于dq变换的叶根弯矩控制.
功率方面:在引入dq变换之后,稳态功率误差减小,几乎和目标方法效果一致;本文提出方法在dq变换的基础上有进一步的提高,表现在响应速度更快,前期建立平衡的过程中功率抖动和超调量更小,这是分段模糊PID的优势之一:即功率平稳的控制效果更好.
图 11
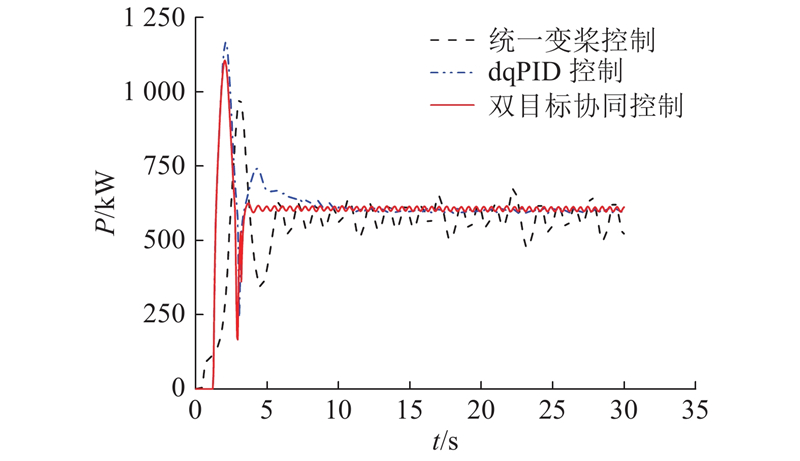
图 12
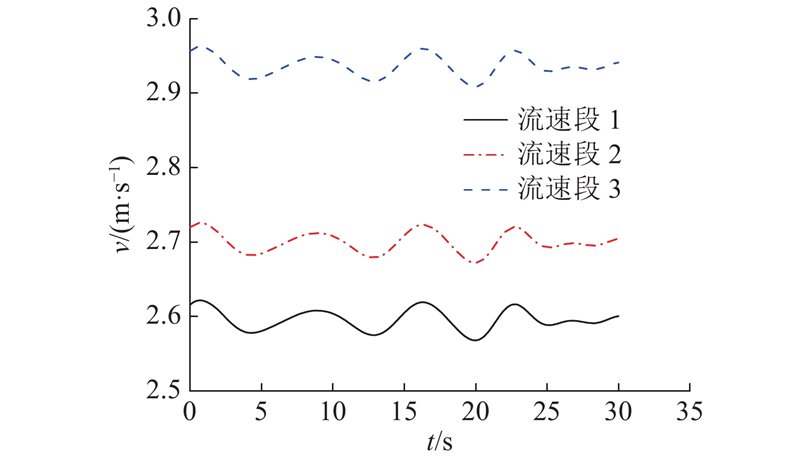
3)在不同流速段的表现.
图 13

图 14

图 15
4. 结 论
(1)在降低不平衡载荷方面,双目标协同控制相对于dqPID控制,超调量从1 874 kN·m下降到了1 558 kN·m,稳态时的弯矩的波动范围小幅下降了
(2)在功率稳态误差控制方面,双目标协同控制,相对于统一变桨控制
(3)在多个流速段下,该方法在功率稳定控制和载荷降低层面均有很好的表现,体现了黄金分割法对于流速段分段处理策略的科学性以及应对复杂工况的全面性.
(4)本文基于功率控制和载荷控制2个层面开展控制策略,相对于之前的单个维度的控制策略,均有更好的表现,这从侧面证明了兼顾功率和载荷控制的理论具有可行性.
参考文献
Current developments and future prospects of offshore wind and ocean energy
[J].DOI:10.1016/j.apenergy.2011.06.011 [本文引用: 1]
Developments in large marine current turbine technologies: a review
[J].
Research on pitch control strategies of horizontal axis tidal current turbine
[J].DOI:10.1007/s13344-020-0021-9 [本文引用: 1]
al. Load reduction for two-bladed horizontal-axis tidal current turbines based on individual pitch control
[J].
水平轴海流能发电机组独立变桨非对称载荷控制方法
[J].DOI:10.3901/JME.2018.20.089 [本文引用: 1]
Asymmetric load control method for individual pitch of horizontal axis marine current turbine
[J].DOI:10.3901/JME.2018.20.089 [本文引用: 1]
A novel fuzzy PI controller for improving autonomous network by considering uncertainty
[J].
High-accuracy method for calculating correlated color temperature with a lookup table based on golden section search
[J].
基于输出误差预测的模糊预测PID控制及应用
[J].
Fuzzy predictive PID controller based on output-error prediction and its application
[J].
Analysis of pressure and flow compound control characteristics of an independent metering hydraulic system based on a two-level fuzzy controller
[J].
基于方位角权重系数分配的独立变桨距控制
[J].DOI:10.3969/j.issn.1671-7848.2014.06.007
Individual pitch control based on azimuth angle weight number assignment
[J].DOI:10.3969/j.issn.1671-7848.2014.06.007
一种模糊PID控制器的设计与仿真
[J].DOI:10.3969/j.issn.1002-2333.2018.11.002
Design and simulation of a fuzzy PID controller
[J].DOI:10.3969/j.issn.1002-2333.2018.11.002
Adaptive individual blade pitch control of an ocean current turbine for load reduction
[J].
Feedback-feedforward individual pitch control for wind turbine load reduction
[J].DOI:10.1002/rnc.1324
降低风力机叶轮载荷独立变桨距控制策略
[J].DOI:10.3969/j.issn.1671-5292.2019.08.021 [本文引用: 1]
Individual pitch control for decreasing wind turbines of rotor load
[J].DOI:10.3969/j.issn.1671-5292.2019.08.021 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}