

风电机组传动链测试系统是通过地面实验台来模拟风电机组在真实环境中可能遇到的各种工况,进而对传动链的各项性能进行测试与优化. 传动链载荷主要分为风力转矩载荷以及偏摆、挥舞和振动等非转矩载荷. 随着风电机组功率的增大,机组所受到的气动载荷、瞬态载荷、扭转振动等都会相应增大,对机组的寿命保障以及维护工作都提出了更高的要求. 因此,在风力转矩自由度拖动实验的基础上,一系列的非扭矩载荷测试尤为必要. 目前,国内的风电机组传动链实验大多采用电动机拖动平台,只对叶轮风力转矩载荷进行单自由度模拟,并不能有效地复现主传动链受到的其余方向的力和弯矩 [5];国际上,美国、英国、丹麦、德国及西班牙等国家都建有国家级大功率风电机组传动链地面公共测试系统[6],具备对风电机组六自由度载荷状态进行真实再现的能力.
本研究对大型风电机组地面传动链测试系统的结构方案进行介绍,叙述六自由度载荷模拟技术的原理,论述拖动加载方式下叶轮的惯量模拟问题. 此外,由于国外具体五自由度加载技术的保密,本研究根据现有国外加载情况的图片并结合动力结构分析,归纳了3种主要的非扭矩五自由度载荷的加载方式,并构建了载荷方程. 鉴于目前国内相关研究空白,且等比例建造成本昂贵,根据对称加载方案原理在实验室搭建100 kW风电机组传动链加载系统实验台,对非扭矩五自由度载荷进行了精确复现,验证了非扭矩五自由度加载技术的可行性与合理性,同时结合对风力转矩载荷单自由度的模拟技术,实现了对风电机组完整载荷的模拟,为我国建成大型风电机组地面传动链测试系统奠定理论和技术基础.
1. 大型风电机组传动链测试系统结构方案
国际上,美国、英国、丹麦及德国等都建有国家级大功率风电机组传动链地面公共测试系统. 其中,如图1(a)所示,美国克莱姆森大学(ClemsonUniversity)建有7.5、15.0 MW 2个传动链地面测试平台[7];英国海上可再生能源孵化中心(ORECatapult)拥有3套非扭矩加载(non-torque loading, NTL)传动链测试平台,其中包括如图1(b)所示的15 MW全自由度实验台[8];如图1(c)所示,丹麦林都海洋可再生能源测试中心(LORC)设有10 MW级高加速度寿命测试系统[9];如图1(d)所示,德国弗朗霍夫风能与能源系统研究所(FraunhoferIWES)建设的10 MW传动链测试系统于2015 年年底投入使用[10].
图 1

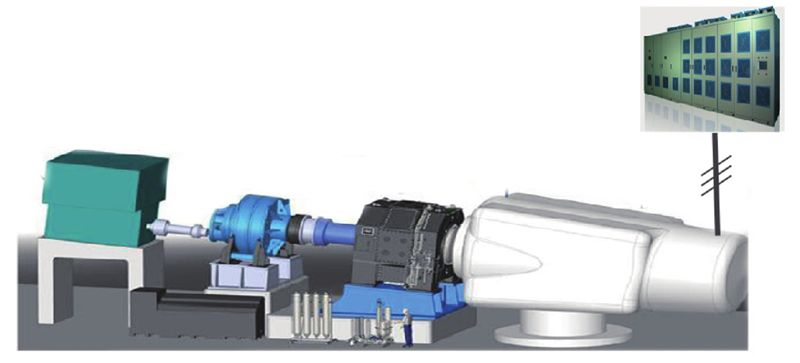
如图2所示,风电机组传动链测试系统的主体结构包括电机、减速箱、非扭矩五自由度加载装置、被测机组以及电网模拟器. 为了有效实现测试系统的多自由度载荷复现,采用电动机拖动加载和电液加载合成的方式:电机通过减速箱拖动传动链旋转以再现风力转矩载荷;在主传动轴上固定圆形的加载盘,以模拟载荷承载部件,如叶片、轮毂、舱罩等部件的重力和转动惯量特性,并作为非扭矩五自由度载荷的作用对象. 通过电机与电液加载作动器的出力合成,可以较为全面真实地再现风电机组在各种工况下的各类载荷状态[11]. 被测机组内包含齿轮箱、轴承、发电机等被测试件. 电网模拟器用来检测风电机组产生的电能是否达到并入电网电能的质量要求. 这样,风电机组传动链地面测试系统可以实现完整风力载荷和不同电网条件下复杂工况的模拟.
图 2
2. 六自由度载荷模拟技术
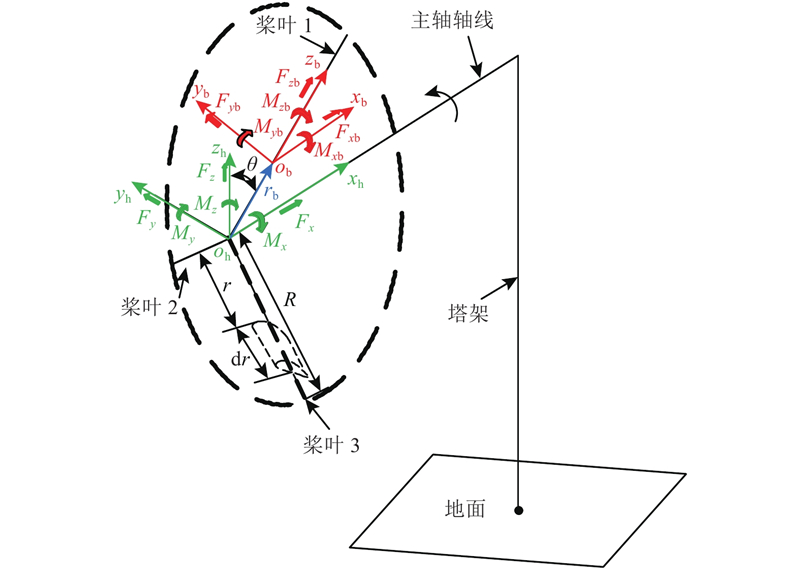
在风电机组的实际使用中,常常会受到各类动态不均衡载荷的影响,这些载荷可以分为沿主轴轴向的风力转矩载荷以及风轮旋转面方向上的非转矩载荷. 对于风力转矩载荷,可以通过有效控制电机输出转矩来拖动主传动链旋转以复现;针对非扭矩载荷,如图3所示,建立旋转的以Ob为原点的桨叶坐标系(xb-yb-zb)和静止的以Oh为原点的轮毂坐标系(xh-yh-zh). 图中,R、r、rb分别为风轮旋转半径、叶素的局部半径以及两坐标原点Oh和Ob之间的距离,dr为叶素微段的半径增量,
图 3
2.1. 拖动加载方式下叶轮的惯量模拟
由空气动力学知识可知,风力机的输出气动(机械)转矩可以表示为
式中:
由于原动机的转动惯量往往远小于实际风力机的转动惯量,若直接以风力机的静态转矩(即气动转矩)对电动机进行控制,会造成模拟系统的动态过程与实际机组的动态过程存在较大的出入. 当实际风电机组与模拟风电组运行时,分别满足如下机械运动方程:
式中:
根据式(2)、(3)可以得出,要使模拟机组与实际机组的动态过程一致,只要保证两者的转速时刻相同即可,即
式中:右侧第1项为静态转矩,第2项为动态补偿转矩[15]. 这样既完成了风电机组对风力转矩载荷的惯量模拟,同时保证了模拟机组的静态和动态性能与实际机组完全一致.
2.2. 非扭矩五自由度加载技术
非扭矩五自由度加载技术即模拟风机在Fx、Fy、Fz、My、Mz这5个自由度的加载情况. 根据国外加载情况的图片并结合动力结构分析归纳得出,现有的加载技术主要通过以下3种电液加载作动器的布置方案来模拟风电机组在不同风速下所受的载荷情况.
2.2.1. 对称加载方案
对称加载方案是将叶片、轮毂、舱罩等构件等效为一圆形加载盘,用24个液压缸的输出推力合成得出5个自由度的载荷. 其中左、右两侧分别布置完全对称且均匀分布的8个液压缸,径向同样均匀布置8个液压缸,每2个关于加载圆盘轴线旋转对称[16]. 考虑到圆盘的加载口机械结构的可实现性,所有的液压缸只能对圆盘施加推力[17],故将加载圆盘左、右两侧同一个方向的力如
图 4
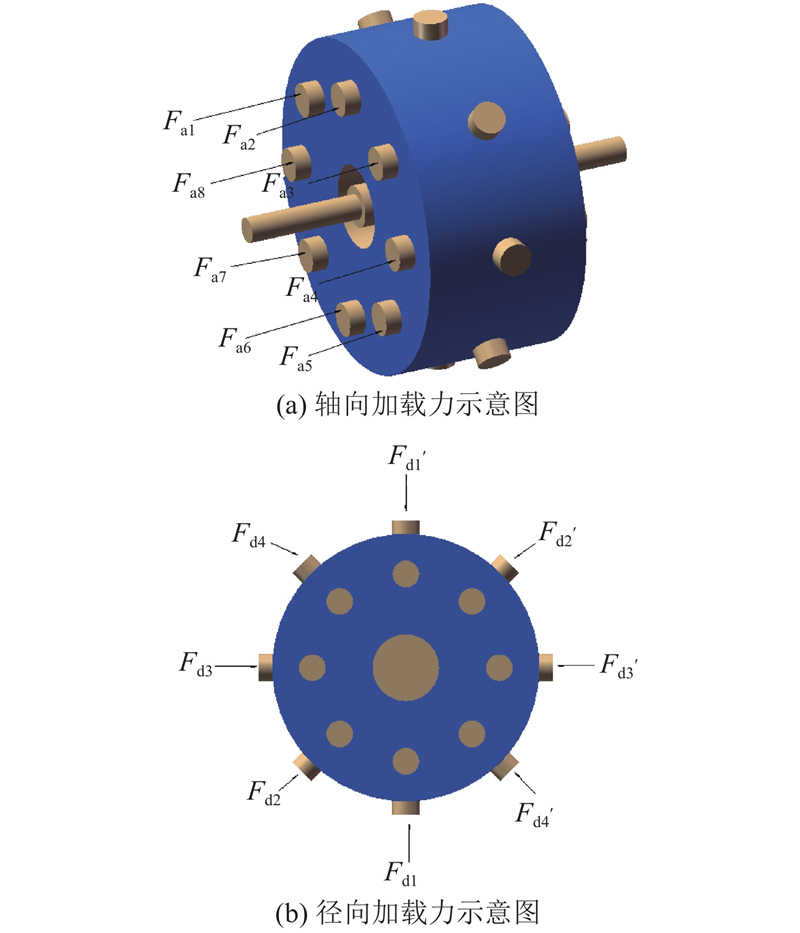
图 4 对称加载方案加载盘轴向与径向受载示意图
Fig.4 Schematic diagram of axial and radial loading of bearing disk in symmetrical loading scheme
根据力和力矩平衡,可以得出以下方程:
美国克莱姆森大学采用的正是对称加载方案,该方案可以有效模拟风轮的大惯量对于主轴的影响,更贴近实际工况. 同时,根据力分解方程可知,几个参数之间不存在耦合关系,不同方向的载荷作用互不影响,使得求解步骤相对简化,可以分开制定控制策略,提高系统的控制精度. 但是,由于其加载盘与被测机组的主轴一同转动,液压缸与加载盘之间必须设置静压轴承,且须严格控制油膜的厚度以保证作用效果,都在一定程度上增加了系统的复杂程度.
2.2.2. 径向偏心加载方案
径向偏心加载方案与对称加载方案类似,在轴向同样对称布置16个液压缸. 不同之处在于,其径向仅采用4个液压缸,且作用线并不在加载盘的中线上. 英国海上可再生能源孵化中心(ORECatapult)采用的是径向偏心加载方案.
根据类似的力分解方法,定义轴向左、右两侧液压缸的加载力矢量为
图 5

图 5 径向偏心加载方案加载盘轴向与径向受载示意图
Fig.5 Schematic diagram of axial and radial loading of bearing disk in radial eccentric loading scheme
根据结构可以列出五自由度模型的求解方程:
在此种加载方案下,径向液压缸的加载力矢量并不在加载盘的中心面上,因此在提供较大弯矩的同时并不需要过高的油压. 不过,这样的结构布置使得径向加载缸的直径较大,理论上会造成更大的误差;同时五自由度模型中的5个载荷相互耦合,计算过程较对称加载方案更加复杂.
2.2.3. 并联六液压缸加载方案
并联六液压缸加载方案的作用原理如图6所示,即通过控制6个加载力矢量(液压推杆)改变加载盘的空间姿态,通过轴承最终作用于被测机组的主轴系统. 丹麦林都海洋可再生能源测试中心(LORC)采用的是并联六液压缸加载方案.
图 6
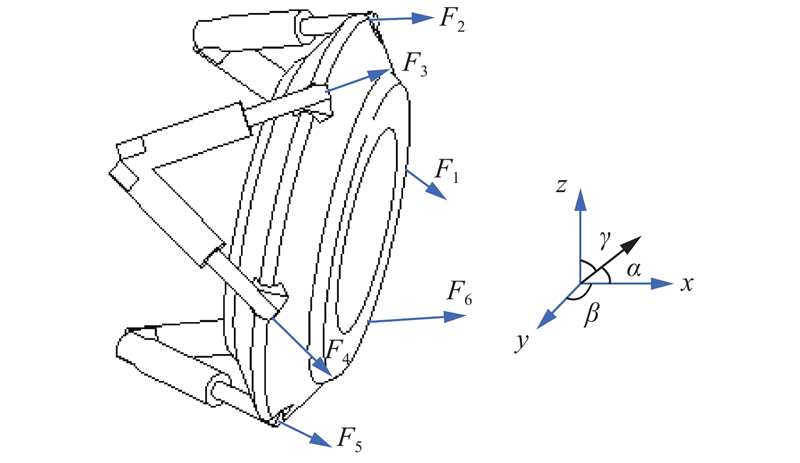
此方案的五自由度载荷分解计算须在空间坐标系中进行,忽略抵消重力作用的最下方2个固定缸,对于任意加载力
这种加载方式可以通过较少数目的液压缸完成预定加载目标,便于控制. 但是,5个载荷相互耦合,分解相对困难,计算过程较前2种方案更复杂;平台的位移量大,须定制联轴器加以解决.
3. 风电机组传动链加载系统的实验研究
目前国内现有风电机组传动链测试平台已经能够通过电机拖动实验对风力转矩载荷进行单自由度的模拟,实验技术相对成熟. 为了验证非扭矩五自由度加载技术的可行性与合理性,在实验室内根据对称加载方案设计搭建100 kW风电机组传动链加载系统实验台,并进行风电机组五自由度载荷电液加载系统载荷复现的现场实验研究,其中的非扭矩五自由度加载实验台参数及主要部件型号如表1所示.
表 1 100 kW风电机组非扭矩加载实验台参数及主要部件型号
Tab.1
| 参数 | 数值/型号 |
| 液压站驱动电机额定功率 | 25 kW |
| 液压泵额定转速 | 1450 r/min |
| 液压泵额定体积流量 | 20 L/min |
| 油缸工作压力 | 20 MPa |
| 比例伺服阀 | 4WRA6E-15-24 |
| 液压缸 | YGD-80/56EX25-TB3121-71 |
如图7(a)所示,在非扭矩五自由度加载实验中,将机组载荷的承载部件等效为一圆盘,作为加载力和弯矩的作用对象,称该圆盘为加载盘. 加载盘应与实际的叶片、轮毂、舱罩等结构件在质量、转动惯量物理特性的指标上相同,以便体现叶轮及其组件的真实特征[18]. 考虑到加载精度与力求解计算的简便,采用对称加载方案. 由于加载盘为悬浮支承并相对加载器做旋转运动,加载器须通过动压润滑支承装置与加载盘作浮动连接[19-20]. 在加载力控制模型建立时,忽略静压轴承的油膜黏性,将其支承油膜等效为负载弹簧,并将弹簧刚度K与液压缸活塞杆位移之积视为加载力,再根据这一非线性模型进行控制器设计,从而保证加载系统的控制精度和稳定性.
图 7

图 7 风电机组传动链加载系统实验台
Fig.7 Experimental bench of wind turbine drive chain loading system
实验首先通过Bladed软件计算得出100 kW机组的极限载荷谱作为目标载荷,经过式(5)加载力的分解,计算出各个加载作动器所需提供的加载力. 实验台的液压系统由每个作动器所对应的液压回路组成,液压回路包括由放大器信号控制的电液比例阀和液压缸,每个液压缸无杆腔均设置有压力传感器,用于检测获得液压缸实际加载力,经过式(5)加载力的合成后,作为实际载荷展现在如图7(b)所示的监控界面. 上位机测控程序采用LabVIEW软件编写,采样周期为500 ms. LabVIEW程序将Bladed软件计算出的风机载荷谱读取出来并与压力传感器反馈后计算合成的数据进行比较,获得电压控制量,再通过工控机的数据输出模块输出给执行机构,以实现加载力的闭环控制.
4. 实验结果与分析
如图8所示为单缸阶跃加载实验,该实验主要用于分析单缸闭环控制系统的响应性能、超调量及稳定性. 图中,F为加载力。从响应曲线可以看出,在0.5 s给系统稳态值50 kN的阶跃响应,加载力实测值能够迅速响应阶跃参考值,调整时间约为0.2 s,超调量基本可以保持在6%以内. 可以说明,单缸闭环控制系统稳定,且响应速度和超调量均可以满足高精度加载力控制要求.
图 8
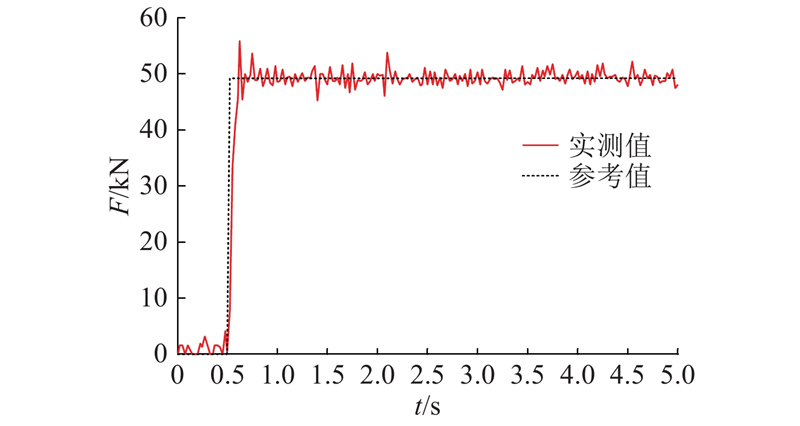
图 9

图 10

图 10 五自由度瞬态载荷复现结果
Fig.10 5-degree-of-freedom transient load recurrence results
可以看出,无论阶跃载荷还是瞬态载荷,加载实验台均可以快速跟踪并复现五自由度的目标载荷,复现的Fx、Fy、Fz最大加载力分别为315.2、−41.7、−77.8 kN,复现的My、Mz最大加载弯矩分别为64.5、63.3 kN∙m,载荷复现误差基本保持在15%以内,说明对称加载方案可以实现非扭矩五自由度的精确加载,从而验证了五自由度加载技术方案的可行性与合理性.
5. 结 论
(1)介绍了风电机组传动链地面测试系统载荷模拟技术,阐述了风电机组传动链测试平台的结构,系统论述了六自由度载荷加载装置.
(2)根据现有国外加载情况的图片并结合动力结构分析,首次归纳总结公开了3种主要的非扭矩五自由度加载方案,并构建了加载方程,分析其优劣,为我国建成大型风电机组地面传动链测试系统奠定了理论基础.
(3)鉴于目前国内相关研究空白,根据对称加载方案原理在实验室内搭建100 kW风电机组传动链地面测试系统实验台,并进行风电机组非扭矩五自由度电液加载系统的现场实验研究. 实验对非扭矩五自由度载荷进行了精确复现,验证了非扭矩五自由度加载技术的可行性与合理性,同时结合对风力转矩载荷的模拟技术,实现了风电机组六自由度载荷的完整模拟.
(4)针对风电机组大型化的趋势,后续的风电机组地面传动链测试研究应以大尺寸、高精度、高可靠性为基础,搭建大型风电机组公共、全尺寸测试系统,全面提高风电行业公共测试能力和测试水平.
参考文献
国内外大型风电机组关键技术发展趋势(二)
[J].DOI:10.3969/j.issn.1674-9219.2016.03.009 [本文引用: 1]
Key technological development trends of large wind turbines at home and abroad(2)
[J].DOI:10.3969/j.issn.1674-9219.2016.03.009 [本文引用: 1]
大型风电机组传动链测试系统国内外现状及展望
[J].
Present situation and prospect of drive chain testing system for large wind turbines at home and abroad
[J].
大型风电机组传动链地面试验工况模拟技术研究综述
[J].DOI:10.3969/j.issn.1671-5292.2018.05.017 [本文引用: 1]
Summary of ground test condition simulation technology forlarge wind turbine transmission chain
[J].DOI:10.3969/j.issn.1671-5292.2018.05.017 [本文引用: 1]
Loading system and control strategy for simulating wind turbine loads
[J].DOI:10.1177/1077546315600110 [本文引用: 1]
两种风力机动态模拟方法的比较
[J].
Comparison of two dynamic simulation methods forwind turbines
[J].
风力机机械特性模拟方法分析研究
[J].
Analysis and research on mechanical characteristics simulation method of wind turbine
[J].
基于转矩伪微分反馈的风轮机动静态特性模拟
[J].DOI:10.3969/j.issn.1000-6753.2014.11.014 [本文引用: 1]
Dynamic and static characteristics simulation of wind turbines based onpseudo-differential feedback of torque
[J].DOI:10.3969/j.issn.1000-6753.2014.11.014 [本文引用: 1]
Reproduction of five degree-of-freedom loads for wind turbine using equispaced electro-hydraulic actuators
[J].
风电机组五自由度载荷复现的控制技术
[J].
Control technology of wind turbine five degree of freedom load recurrence
[J].
复现风力机五自由度载荷的主动静压加载控制
[J].
Active hydrostatic loading control reappearing five-degree-of-freedom gradient of wind turbine
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}