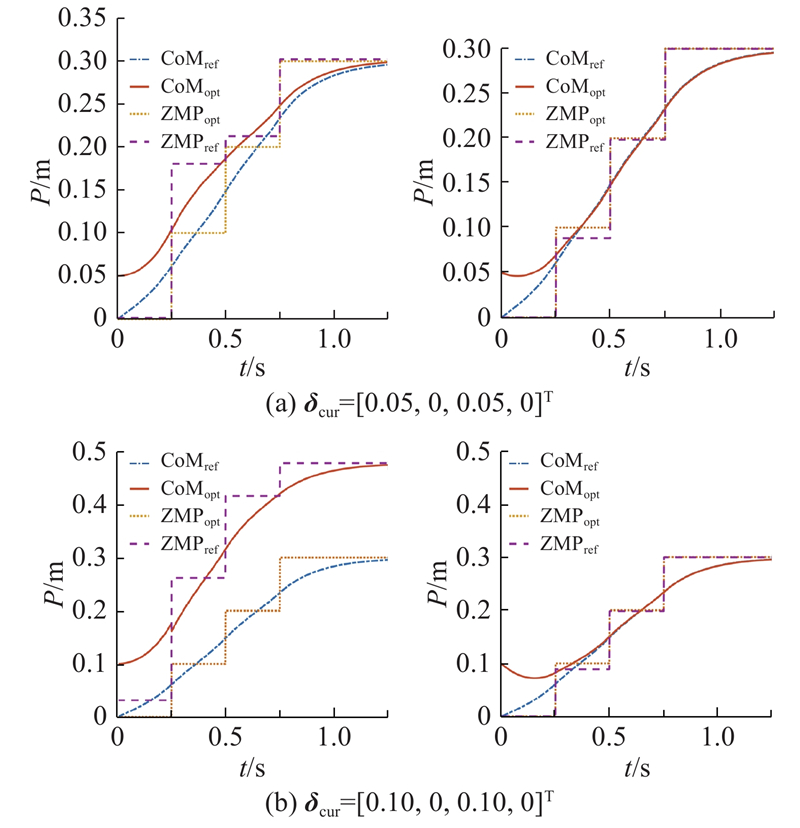
在第1组对照实验中 ${{{\delta }}_{{\rm{cur}}}} \!=\! {\left[\!\!\!\!\!\!\!\! {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {0.05},\!\!\!&\!\!\!0, \end{array}}\!\!\!{\begin{array}{*{20}{c}} {0.05},\!\!\!&\!\!\!0 \end{array}} \end{array}}\!\!\!\!\!\!\!\! \right]^{\rm{T}}}$ 图5(a) 所示. 图中,CoMref 、CoMopt 分别为参考CoM轨迹和优化出的期望CoM轨迹,ZMPref 、ZMPopt 分别为参考ZMP位置和优化出的期望ZMP位置. 经典模型预测控制与宽松初始状态模型预测控制优化出来的质心轨迹均收敛离线规划的质心轨迹上. 但宽松初始状态模型预测控制收敛的速度更快一些. 在第2组对照实验中, ${{{\delta }}_{{\rm{cur}}}}\! =\! \! {\left[ \!\!\!\!\!\!\!\!\!{\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {0.10},\!\!\!\!&\!\!\!\!0 ,\end{array}}\!\!\!\!{\begin{array}{*{20}{c}} {0.10},\!\!\!\!&\!\!\!\!0 \end{array}} \end{array}}\!\!\!\!\!\!\!\!\! \right]^{\rm{T}}}$ 图5(b) 所示. 通过对比试验的结果可以看出,在相同的预测时域内,宽松初始状态预观控制器在2步以内就可以使轨迹到达参照轨迹,而经典模型预测控制优化出来的轨迹并没有收敛到参照轨迹上. 对比实验表明,与经典模型预测控制相比,宽松初始状态模型预测控制可以承受较大的质心轨迹跟踪误差.
MATLAB作为控制器负责在线步态规划与全身运动控制. 机器人的仿真参数设置如表1 所示. 机器人的初始状态为在原点处静止,初始落脚点为(0, 0). 在线步态规划随着期望脚印的更新根据机器人当前的状态每一步(0.25 s)进行一次重新规划,全身运动控制在每个控制周期内(5 ms)求解出跟随期望轨迹运动的关节力矩. 当机器人4条腿全部着地时,其躯干6个自由度均可控,其权重矩阵S [18 ] 指出,四足动物希望到达其侧方的某个位置时,一般会旋转躯干使自己朝向目标前进,很少采用直接侧向移动的方式. 因此放弃对其y 方向的控制,此时权重矩阵为 ${{S}} = {\rm{diag}}\;[70,\;0,\;100,\;80,\;80,\;80]$ .
[1]
JOE H M, OH J H Balance recovery through model predictive control based on capture point dynamics for biped walking robot
[J]. Robotics and Autonomous Systems , 2018 , 105 : 1 - 10
DOI:10.1016/j.robot.2018.03.004
[本文引用: 1]
[2]
KAJITA S, KANEHIRO F, KANEKO K, et al. The 3D linear inverted pendulum mode: a simple modeling for a biped walking pattern generation [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems . Maui: IEEE, 2001, 1: 239-246.
[本文引用: 1]
[3]
易江, 朱秋国, 吴俊, 等 基于最优控制的仿人机器人行走振动抑制
[J]. 机器人 , 2018 , 40 (2 ): 129 - 135
[本文引用: 1]
YI Jiang, ZHU Qiu-guo, WU Jun, et al Walking vibration suppression for humanoid robot based on optimal control
[J]. Robot , 2018 , 40 (2 ): 129 - 135
[本文引用: 1]
[4]
KAJITA S, KANEHIRO F, KANEKO K, et al. Biped walking pattern generation by using preview control of zero-moment point [C]// IEEE International Conference on Robotics and Automation . Taipei: IEEE, 2003, 2: 1620-1626.
[本文引用: 1]
[5]
WIEBER P B. Trajectory free linear model predictive control for stable walking in the presence of strong perturbations [C]// IEEE-RAS International Conference on Humanoid Robots . Genova: IEEE, 2006: 137-142.
[本文引用: 1]
[6]
FENG S, WHITMAN E, XINJILEFU X, et al Optimization-based full body control for the DARPA robotics challenge
[J]. Journal of Field Robotics , 2015 , 32 (2 ): 293 - 312
DOI:10.1002/rob.21559
[本文引用: 1]
[7]
KAMIOKA T, KANEKO H, TAKENAKA T, et al. Simultaneous optimization of ZMP and footsteps based on the analytical solution of divergent component of motion [C]// IEEE International Conference on Robotics and Automation . Brisbane: IEEE, 2018: 1763-1770.
[本文引用: 1]
[8]
HOF A L The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking
[J]. Human Movement Science , 2008 , 27 (1 ): 112 - 125
DOI:10.1016/j.humov.2007.08.003
[本文引用: 1]
[9]
PRATT J, CARFF J, DRAKUNOV S, et al. Capture point: a step toward humanoid push recovery [C]// IEEE-RAS International Conference on Humanoid Robots . Genova: IEEE, 2006: 200-207.
[本文引用: 1]
[10]
LANARI L, HUTCHINSON S, MARCHIONNI L. Boundedness issues in planning of locomotion trajectories for biped robots [C]// IEEE-RAS International Conference on Humanoid Robots . Madrid: IEEE, 2014: 951-958.
[本文引用: 1]
[11]
WANG H, ZHAO M. A robust biped gait controller using step timing optimization with fixed footprint constraints [C]// IEEE International Conference on Robotics and Biomimetics . Macau: IEEE, 2017: 1787-1792.
[本文引用: 1]
[12]
KHADIV M, KLEFF S, HERZOG A, et al. Stepping stabilization using a combination of dcm tracking and step adjustment [C]// International Conference on Robotics and Mechatronics . Tehran: IEEE, 2016: 130-135.
[本文引用: 2]
[13]
ENGLSBERGER J, OTT C. Integration of vertical com motion and angular momentum in an extended capture point tracking controller for bipedal walking [C]// IEEE-RAS International Conference on Humanoid Robots . Osaka: IEEE, 2012: 183-189.
[本文引用: 2]
[14]
VUKOBRATOVI M, BOROVAC B Zero-moment point: thirty five years of its life
[J]. International Journal of Humanoid Robotics , 2004 , 1 (1 ): 157 - 173
DOI:10.1142/S0219843604000083
[本文引用: 1]
[15]
BELLICOSO C D, JENELTEN F, GEHRING C, et al Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots
[J]. IEEE Robotics and Automation Letters , 2018 , 3 (3 ): 2261 - 2268
DOI:10.1109/LRA.2018.2794620
[本文引用: 1]
[16]
MISTRY M, BUCHLI J, SCHAAL S. Inverse dynamics control of floating base systems using orthogonal decomposition [C]// IEEE International Conference on Robotics and Automation . Anchorage: IEEE, 2010: 3406-3412.
[本文引用: 1]
[17]
陈腾, 李贻斌, 荣学文 四足机器人动步态下实时足底力优化方法的设计与验证
[J]. 机器人 , 2019 , 41 (3 ): 307 - 316
[本文引用: 1]
CHEN Teng, LI Yi-bin, RONG Xue-wen Design and verification of real-time plantar force optimization for quadruped robots in dynamic gait
[J]. Robot , 2019 , 41 (3 ): 307 - 316
[本文引用: 1]
[18]
张国腾, 荣学文, 李贻斌, 等 基于虚拟模型的四足机器人对角小跑步态控制方法
[J]. 机器人 , 2016 , 38 (1 ): 64 - 74
[本文引用: 1]
ZHANG Guo-teng, RONG Xue-wen, LI Yi-bin, et al Control of the quadrupedal trotting based on virtual model
[J]. Robotics , 2016 , 38 (1 ): 64 - 74
[本文引用: 1]
Balance recovery through model predictive control based on capture point dynamics for biped walking robot
1
2018
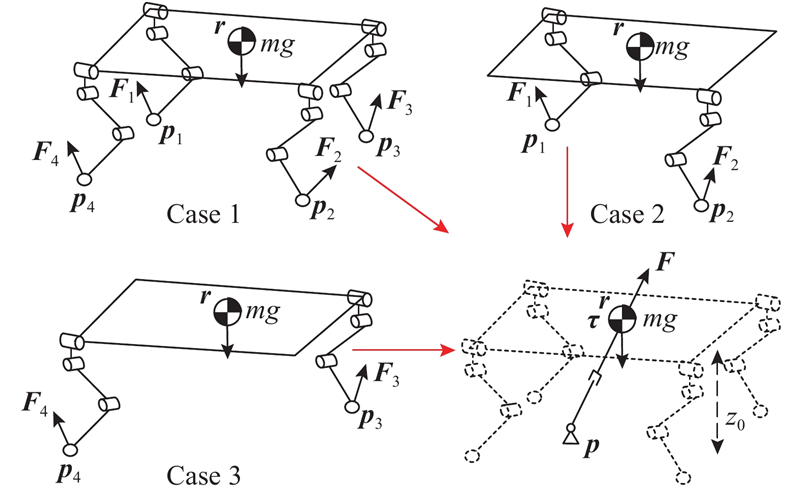
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
基于最优控制的仿人机器人行走振动抑制
1
2018
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
基于最优控制的仿人机器人行走振动抑制
1
2018
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
Optimization-based full body control for the DARPA robotics challenge
1
2015
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking
1
2008
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 为了确保四足机器人能够稳定行走,其质心(center of mass,CoM)的轨迹必须根据稳定性标准生成. 基于稳定性标准生成CoM轨迹,往往需要模型[1 ] . 使用全尺寸模型进行在线步态规划需要大量的计算,无法保证系统的实时性. 模型近似化是处理此问题的有效方法. 许多研究[2 -3 ] 已经证明在双足机器人运行速度不是很高的情况下可以将其抽象成线性倒立摆模型. Kajita等[4 ] 提出基于零矩点(zero moment point,ZMP)的预观控制方法,根据预定义的ZMP轨迹生成CoM轨迹. 这种方法使用线性二次调节器(linear quadratic regulator,LQR)进行步态规划,通过构造代价函数来权衡ZMP跟踪与CoM加速度之间的关系,但是此方法不能考虑系统输入的约束条件. Wieber[5 ] 对预观控制的方法进行改进,提出使用模型预测控制(model predictive control,MPC)的步态生成方法. MPC方法通过考虑ZMP的约束和机器人当前的状态来重新计算CoM轨迹,从而实现对双足机器人HRP-2的平衡控制. Feng等[6 ] 使用非线性模型,运用微分动态规划(differential dynamic programming,DDP)来在线计算CoM轨迹. 在以上方法中,CoM的位置和速度被视为系统的状态量,通过LIPM的状态方程以及系统当前的状态和输入约束,获得CoM的轨迹. 尽管此方法能够进行步态规划,但通过限制位置和速度,LIPM动力学的不稳定分量和稳定分量都受到约束. Kamioka等[7 ] 将状态量位置和速度进行坐标变换,将其解耦为不稳定分量与稳定分量,并定义不稳定分量为运动发散分量(divergent component of motion,DCM),Hof[8 ] 称其为XCoM,Pratt等[9 ] 也提出了这一概念,并命名为Capture point(CP). Lanari 等[10 ] 指出只要确保DCM有界,就可以保证系统的输出有界. ...
1
... 目前有2种方法保证其有界,一种是改变后续的系统输入,另外一种是改变当前DCM的期望值. Wang等[11 ] 通过优化当前一步的剩余步行周期时长使DCM达到目标值,进而使机器人具有更加鲁棒性的步态. Khadiv等[12 ] 提出将步行周期时长和落脚点一起优化可以使双足机器人在较大的扰动中恢复平衡. Englsberger等[13 ] 提出逆向递推方法来求解CP的期望轨迹,通过改变当前一步的ZMP位置来促使系统的CP跟踪其期望轨迹运动. 此方法由于有固定脚印约束,而且必须保证ZMP在支撑多边形内,其只能承受较小的扰动. ...
2
... 目前有2种方法保证其有界,一种是改变后续的系统输入,另外一种是改变当前DCM的期望值. Wang等[11 ] 通过优化当前一步的剩余步行周期时长使DCM达到目标值,进而使机器人具有更加鲁棒性的步态. Khadiv等[12 ] 提出将步行周期时长和落脚点一起优化可以使双足机器人在较大的扰动中恢复平衡. Englsberger等[13 ] 提出逆向递推方法来求解CP的期望轨迹,通过改变当前一步的ZMP位置来促使系统的CP跟踪其期望轨迹运动. 此方法由于有固定脚印约束,而且必须保证ZMP在支撑多边形内,其只能承受较小的扰动. ...
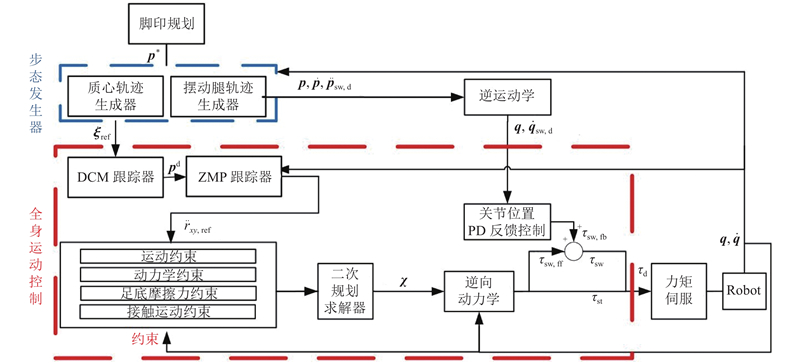
... 如图4 所示为本研究的运动控制框架,由上层步态发生器与下层全身运动控制两部分组成. 步态发生器根据参考脚印和机器人当前的状态,在每次足端着地后在线优化出一条可执行的期望状态轨迹、下一步落脚点的位置以及摆动腿的运动轨迹. 全身运动控制计算关节力矩τ d . 全身运动控制中的DCM跟踪器通过式(21)计算出促使DCM跟踪其参照轨迹 ${{{\xi }}_{\rm{ref}}} $ p d . ZMP控制器[12 ] 计算出达到期望ZMP位置所需要的质心在水平面的加速度 ${{\ddot {{r}}}_{{{xy,{\rm{ref}}}}}}$ . 躯干其余4个自由度的加速度均由PD反馈控制器得到. 二次规划优化出满足约束条件下,可以达到的质心加速度与关节加速度 ${{\ddot{ \theta }}^{\rm{*}}} = {\left[ \!\!\!{\begin{array}{*{20}{c}} {{{{\ddot{ \theta }}}_{\rm b}}},&{{\ddot{ q}}} \end{array}}\!\!\! \right]^{\rm{T}}}$ ${{{f}}_{\rm{d}}}$ . 将优化出的变量代入动力学方程式(22)中,计算出达到期望运动所需要的关节力矩τ st . 为了让摆动腿更好地跟踪期望轨迹,摆动腿的各个关节力矩τ sw 采用前馈反馈综合控制. 将逆向动力学计算出来的力矩τ sw,ff 作为前馈项,反馈项τ sw,fb 由关节位置PD反馈控制器计算得到. ...
2
... 目前有2种方法保证其有界,一种是改变后续的系统输入,另外一种是改变当前DCM的期望值. Wang等[11 ] 通过优化当前一步的剩余步行周期时长使DCM达到目标值,进而使机器人具有更加鲁棒性的步态. Khadiv等[12 ] 提出将步行周期时长和落脚点一起优化可以使双足机器人在较大的扰动中恢复平衡. Englsberger等[13 ] 提出逆向递推方法来求解CP的期望轨迹,通过改变当前一步的ZMP位置来促使系统的CP跟踪其期望轨迹运动. 此方法由于有固定脚印约束,而且必须保证ZMP在支撑多边形内,其只能承受较小的扰动. ...
... 模型预测控制须参考轨迹. 参考轨迹依照规划的脚印生成. 如图2 所示为 ${{\delta }}_{{k}}^*$ ${{p}}_{{k}}^*$ [13 ] , 其递推公式为 ...
Zero-moment point: thirty five years of its life
1
2004
... 为了保证四足机器人能够稳定运动,ZMP须在支撑多边形的内部[14 ] . 可以通过公式约束ZMP: ...
Dynamic locomotion through online nonlinear motion optimization for quadrupedal robots
1
2018
... 式中: ${{{p}}^{\rm{d}}} $ ${{n}}$ [15 ] , ${{n}}$ ${{m}}$
1
... 根据四足机器人动力学模型,须对逆向动力学进行求解. 正交分解法的本质是剔除系统中的等式约束后,运用伪逆矩阵求得达到期望加速度最优的力矩[16 ] . 但是这种方法不能考虑不等式约束. 本研究采用二次规划法来求解四足机器人的逆向动力学方程. ...
四足机器人动步态下实时足底力优化方法的设计与验证
1
2019
... 为了使摆动腿跟踪步态规划的期望运动,控制器在笛卡尔空间内通过前馈-反馈控制来约束摆动腿各个驱动关节的加速度. 式(24)表示机器人质心加速度与地面反作用力的关系. 为了保证支撑腿与地面不发生相对滑动,通过式(25)来约束支撑腿足端的加速度始终与足端的速度成反比. 地面反作用力必须作用在接触点的法向量的摩擦锥内[17 ] . 式(26)将摩擦力约束写成线性的形式,此时摩擦锥近似为摩擦金字塔形. 基于此线性化可以保证优化始终为二次规划问题. 式(27)约束质心加速度与地面反作用力,防止逆向动力学使用优化变量计算出来的关节力矩超出机器人关节的输出极限力矩. ...
四足机器人动步态下实时足底力优化方法的设计与验证
1
2019
... 为了使摆动腿跟踪步态规划的期望运动,控制器在笛卡尔空间内通过前馈-反馈控制来约束摆动腿各个驱动关节的加速度. 式(24)表示机器人质心加速度与地面反作用力的关系. 为了保证支撑腿与地面不发生相对滑动,通过式(25)来约束支撑腿足端的加速度始终与足端的速度成反比. 地面反作用力必须作用在接触点的法向量的摩擦锥内[17 ] . 式(26)将摩擦力约束写成线性的形式,此时摩擦锥近似为摩擦金字塔形. 基于此线性化可以保证优化始终为二次规划问题. 式(27)约束质心加速度与地面反作用力,防止逆向动力学使用优化变量计算出来的关节力矩超出机器人关节的输出极限力矩. ...
基于虚拟模型的四足机器人对角小跑步态控制方法
1
2016
... MATLAB作为控制器负责在线步态规划与全身运动控制. 机器人的仿真参数设置如表1 所示. 机器人的初始状态为在原点处静止,初始落脚点为(0, 0). 在线步态规划随着期望脚印的更新根据机器人当前的状态每一步(0.25 s)进行一次重新规划,全身运动控制在每个控制周期内(5 ms)求解出跟随期望轨迹运动的关节力矩. 当机器人4条腿全部着地时,其躯干6个自由度均可控,其权重矩阵S [18 ] 指出,四足动物希望到达其侧方的某个位置时,一般会旋转躯干使自己朝向目标前进,很少采用直接侧向移动的方式. 因此放弃对其y 方向的控制,此时权重矩阵为 ${{S}} = {\rm{diag}}\;[70,\;0,\;100,\;80,\;80,\;80]$ . ...
基于虚拟模型的四足机器人对角小跑步态控制方法
1
2016
... MATLAB作为控制器负责在线步态规划与全身运动控制. 机器人的仿真参数设置如表1 所示. 机器人的初始状态为在原点处静止,初始落脚点为(0, 0). 在线步态规划随着期望脚印的更新根据机器人当前的状态每一步(0.25 s)进行一次重新规划,全身运动控制在每个控制周期内(5 ms)求解出跟随期望轨迹运动的关节力矩. 当机器人4条腿全部着地时,其躯干6个自由度均可控,其权重矩阵S [18 ] 指出,四足动物希望到达其侧方的某个位置时,一般会旋转躯干使自己朝向目标前进,很少采用直接侧向移动的方式. 因此放弃对其y 方向的控制,此时权重矩阵为 ${{S}} = {\rm{diag}}\;[70,\;0,\;100,\;80,\;80,\;80]$ . ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}