

纯电驱动模式下的转矩分配属于纯电动汽车、燃料电池汽车、混合动力汽车通用的关键技术,在该模式下汽车可以利用太阳能、风能、潮汐能等可再生能源转化而来的清洁电能进行工作,从而实现零排放. 多电机驱动形式下电机的能控自由度大大提高,通过对控制策略的设计可以将动力需求合理地分配到各电机上,实现驱动系统性能的提高,因此纯电驱动模式下的多电机驱动转矩分配一直以来都是行业内的热点研究问题.
熊会元等[1]基于电机的MAP特性建立以双电机利用效率最大化为目标的优化模型,实现不同转速与转矩需求下的双电机最优转矩分配. 孙宾宾等[2]基于电机损耗机理设计最优转矩分配策略,指出对于前、后轴匹配相同动力系统的双同步电机驱动电动车,应优先采用双电机平分转矩驱动模式,而非单电机驱动模式. 朱绍鹏等[3]设计驱动力分层控制策略,该策略可以在不影响车辆动力性的同时,提高稳定性. Song等[4]基于终端滑模控制方法制定简单、有效的四轮驱动电动汽车转矩分配控制策略,并通过仿真实验验证了该策略下的系统稳定性. Yang等[5]针对三电机复合驱动电动汽车,设计基于粒子群优化算法的即时驱动力控制方法,使各电机在行驶过程中始终工作于高效区间内. Wang等[6]设计需求转矩实时最优分配策略,使各驱动电机尽可能在高效区间内工作,并对动力总成的部件参数进行优化.
在各种新能源汽车中,混合动力汽车作为传统汽车向纯电动汽车的过渡产品发展最为迅速[7],对其纯电驱动控制策略的研究有助于汽车的电动化转型. 本研究基于双行星排结构的插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)进行双电机纯电驱动模式转矩分配控制策略研究. 基于PHEV动力总成的结构特点,设计主电机高效工作区间控制策略,实现辅电机单独驱动、主电机单独驱动、双电机转矩耦合3种工作模式之间的切换. 针对传统模糊控制系统控制精度不高的缺陷,设计双模糊控制器电机转矩控制系统,结合所提出的电机工作区间划分方法,实现电机工作区间的自适应调整与等效放大,并以驱动系统能量转换效率与电机转矩脉动系数为自变量构建适应度函数,基于遗传算法对控制系统的模糊控制规则进行多目标寻优,以实现主、辅电机驱动转矩的合理分配. 基于Matlab-Simulink仿真平台验证2种控制策略的有效性.
1. 双行星排PHEV动力系统分析
图 1
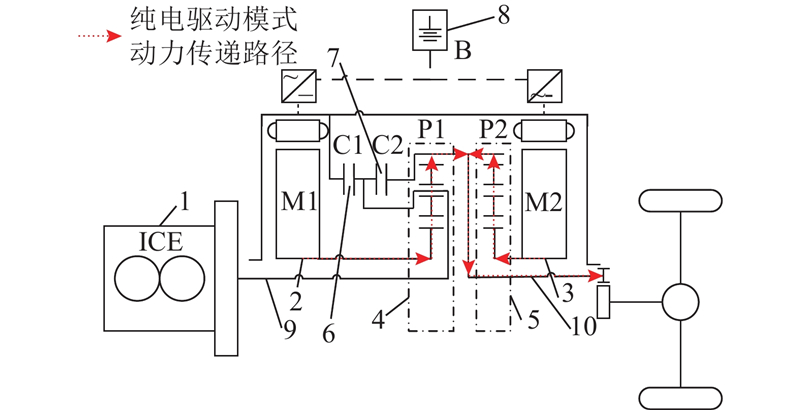
图 1 双行星排PHEV动力总成结构简图
1-发动机;2-辅电机M1;3-主电机M2;4-第1行星排P1;5-第2行星排P2;6-离合器C1;7-离合器C2;8-动力蓄电池;9-发动机输入轴;10-动力输出轴 Structure diagram of dual planetary PHEV powertrain
在动力总成结构中,电机M1、M2分别与行星排P1、P2的太阳轮相连,行星排P1的行星架一端与内燃机(internal combustion engine,ICE)相连,另一端与离合器C1、C2相连,通过控制C1、C2的分离与结合,可以实现动力分配式混合动力驱动、并联混合动力驱动、纯电驱动3种工作模式. 行星排P2的行星架固定,外齿圈与行星排P1的外齿圈相连,并作为总成的动力输出端与动力输出轴相连. 在纯电驱动模式下,离合器C1闭合、C2断开,行星排P1中的行星架被固定,电机通过太阳轮向外齿圈传递力矩,传动比为负值,2个电机形成转矩耦合关系. 行星排P1、P2的特征参数相同,电机M1、M2与外齿圈的转矩关系[9]为
式中:Td为外齿圈的输出转矩,Kp为行星齿轮的齿数比,ηT1、ηT2分别为行星排P1、P2的机械传动效率,TM1、TM2分别为电机M1、M2的输出转矩.
电机M1、M2与外齿圈的转速关系为
式中:Nd为外齿圈的转速,NM1、NM2分别为电机M1、M2的转速.
2. 纯电驱动控制策略设计
图 2
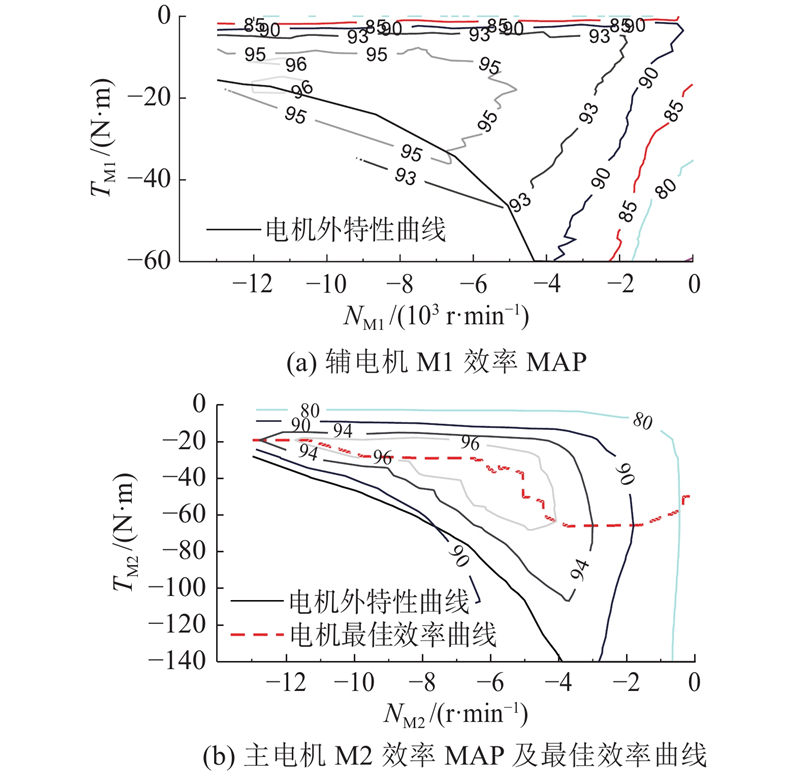
图 2 双电机效率MAP及主电机最佳效率曲线
Fig.2 Dual-motor efficiency MAP and most efficient curve of main motor
2.1. 主电机高效工作区间控制策略
基于PHEV动力总成的结构特点,设计主电机高效工作区间(M2-EWR)控制策略.该策略将纯电驱动模式分为辅电机M1单独(SM1)驱动、主电机M2单独(SM2)驱动、双电机转矩耦合(dual-motor with torque coupling, DTC)驱动3种主要工作模式,其中DTC驱动模式进一步可以分为DTC驱动模式1和DTC驱动模式2.如图3所示为M2-EWR控制策略的模式切换阈值曲线.图中,Treq为整车需求转矩, N为电机转速。曲线L-M1所对应的转矩为0.9×电机M1外特性转矩,曲线L-DTC1所对应的转矩为0.9×电机M1外特性转矩+主电机最佳效率转矩,曲线L-DTC2所对应的转矩为0.9×双电机外特性转矩之和.M2-EWR边界曲线所对应的区间上、下限的转矩计算公式分别为
图 3

图 3 M2-EWR控制策略模式划分示意图
Fig.3 Schematic diagram of M2-EWR control strategy mode division
式中:TM2_eff为主电机的最佳效率转矩,λ为主电机工作区间拓展系数.
由前文对双行星排混合动力总成的介绍,纯电驱动模式下电机的转矩、转速皆为负值. 为了便于叙述,根据各变量绝对值的大小关系设计M2-EWR控制策略,相应的控制策略流程图如图4所示. 图中,TM1_max为辅电机的外特性转矩. 各模式间的切换条件及M2-EWR控制策略的特点如下.
图 4
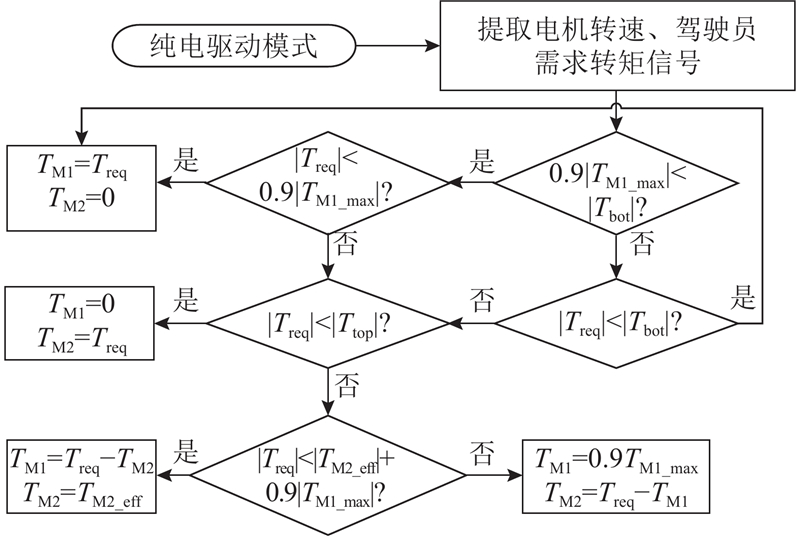
1)SM1驱动模式. 由图2中的双电机万有特性图可知,在低转矩输出工况下,辅电机比主电机更容易进入高效驱动状态. 因此,以0.9|TM1_max|与|Tbot|中的较小值作为SM1驱动切换至SM2驱动模式的阈值,当|Treq|小于该阈值时,驱动系统工作于SM1驱动模式.
2)SM2驱动模式. 当|Treq|达到SM2驱动模式阈值且未达到|Ttop|时进入该模式,对应辅电机单独工作即将无法满足动力需求或需求转矩已经进入主电机高效工作区间的工况,由主电机单独进行驱动.
3)DTC驱动模式. 该模式可以进一步细分为DTC驱动模式1、2,主要区别在于主电机输出转矩是否为当前转速下的最佳效率转矩. 在DTC驱动模式1中,|Treq|<|TM2_eff|+0.9|TM1_max|,因此可以在防止辅电机输出过载的前提下使主电机工作在最佳效率曲线上;若|Treq|超过这一阈值则进入DTC驱动模式2,控制辅电机输出0.9TM1_max,不足的转矩再由主电机提供.
可以看出,M2-EWR控制策略不仅利用双电机工作特性的差异达到高效区间互补的目的,而且在整个策略设计的过程中都尽量保证主电机工作点接近高效工作区间以及最佳效率工作曲线,在由SM2驱动模式向DTC驱动模式切换的过程中可以避免辅电机工作在效率图边缘的低效率区域.
作为M2-EWR控制策略中的重要参数,区间拓展系数λ的取值直接影响策略对系统工作模式以及双电机输出转矩的控制. 为了分析λ的变化与车辆行驶经济性的关系,将策略应用于整车前向仿真模型,基于典型工况进行仿真计算. 如图5所示,耗电量拟合值为λ取不同值时一个中国乘用车行驶循环(China light-duty vehicle test cycle-passenger car,CLTC-P)工况下的电量消耗仿真结果. 图中,Qc为车辆循环耗电量. 为了得到λ取值在[0, 3.25]变化时耗电量变化的大体趋势,基于最小二乘原理对测试点进行数据拟合[11],并随机选取若干离散点对拟合曲线的趋势预测效果进行验证. 拟合得到的耗电量变化趋势曲线与耗电量实测值分布情况如图5所示,验证点变化趋势与曲线变化趋势基本一致.
图 5
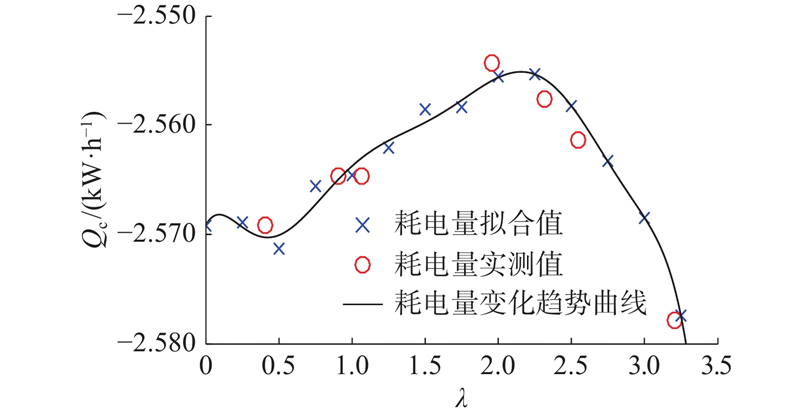
图 5 工作区间拓展系数与车辆循环耗电量的关系
Fig.5 Relationship between working range expansion coefficient and vehicle cycle power consumption
根据拟合曲线的变化情况,CLTC-P循环工况下λ的经济性最优解位于[1.75, 2.50]. 以0.01为变化步长,对区间内参数λ各取值下的系统耗电量进行仿真实验,结果表明,当λ=1.90时车辆循环耗电量最低,为2.5542 kW·h,因此取λ=1.90为车辆循环耗电量的近似最优解.
2.2. 双模糊控制器控制策略
对于多电机纯电驱动系统,以经济性最优为唯一目标进行控制策略设计有可能加剧电机输出转矩的波动幅度,不利于动力系统的稳定性. 另外,对于匹配不同大小电机的驱动系统,容易增加小电机过载的概率,造成电机发热加剧,甚至损坏. 因此,双模糊控制器控制策略的目标包括:1)在保证动力性的前提下达到较高的动力系统能量转换效率;2)保证较为合理的转矩变化率分配,从而控制电机输出转矩的波动情况.
2.2.1. 主电机工作区间划分
采用2.1节中主电机高效区间边界曲线的定义方法,即通过变换式(3)、(4)中区间拓展系数λ的取值,得到如图6所示的系列工作区间边界曲线,对需求转矩与主电机工作转矩进行区间划分.
图 6
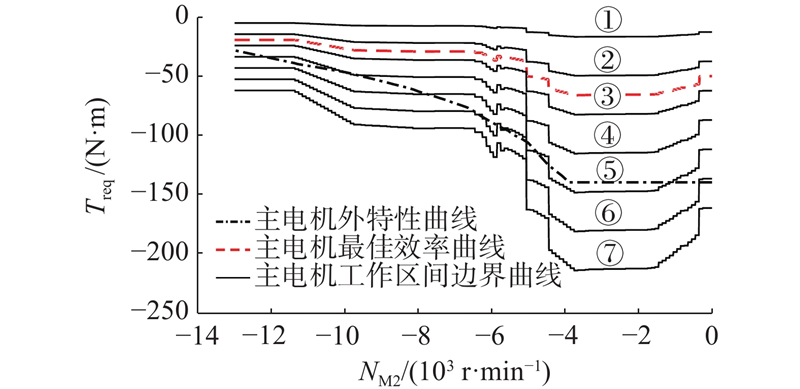
图 6 主电机工作区间划分示意图
Fig.6 Schematic diagram of main motor working range partition
这种非均匀的区间划分方法具有以下特点. 1)当电机转速超过基速,外特性转矩会随着电机转速的提高而降低,此时该方法对电机工作区间的划分也更加细腻,有助于在高速工况下对电机输出转矩的控制. 2)区间序号直观反映了电机负载程度与工作效率的高低,可以作为主电机工作区间调整控制策略的设计依据.
工作区间的位置可以通过区间下限系数Kbot与区间宽度系数μ进行描述. 区间下限转矩与区间下限系数Kbot之间的关系通过式(4)变换得到:
主电机工作区间宽度Twid与区间宽度系数之间的关系为
经仿真计算,在纯电驱动模式下需求转矩与主电机最佳效率转矩的比值不超过3.25,设计区间①~⑦的下限系数Kbot分别为0、1、3、5、7、9、11,当下限系数为0时区间宽度系数μ =1,其余情况取2.
2.2.2. 双模糊控制器控制系统
双模糊控制器控制系统(dual fuzzy controller control system,DFCCS)的结构如图7所示. 系统主要由工作区间自适应调整控制器(operation region adaptive adjustment controller,ORAAC),工作区间解析模块(operation region analysis module,ORAM)以及转矩分配控制器(torque distribution controller,TDC)三部分组成.
图 7

图 7 双模糊控制器控制系统示意图
Fig.7 Schematic diagram of dual fuzzy controller control system
利用ORAAC实现基于模糊控制方法的电机工作区间自适应调节,控制器输入输出量均采用trimf型的隶属度函数. 电机转速的基本论域为[−13000, 0],包含5个模糊子集;需求转矩变化量ΔT的基本论域为[−80, 0],包含3个模糊子集;需求转矩位置关系系数Kf1_1的基本论域为[0, 3.25],包含7个模糊子集,Kf1_1的计算公式为
模糊控制器的工作过程采用Mamdani型的模糊推理方式,and运算采用最小算子,or运算采用最大算子,解模糊运算采用质心法. 最终输出量为区间调整控制系数Kf1_out,该变量的基本论域为[0, 2.25],包含5个模糊子集. 通过ORAM对Kf1_out进行解析,求得区间下限系数:
式中:floor为向负方向取整函数;
利用TDC实现基于模糊控制方法的主电机输出转矩控制,控制器输入输出量同样采用trimf型的隶属度函数. 电机转速的基本论域为[−13000, 0],包含5个模糊子集;区间下限系数的基本论域为[0, 11],包含7个模糊子集;需求转矩区间位置关系系数Kf2_1的基本论域为[0, 6],包含6个模糊子集,Kf2_1的计算公式为
与ORAAC类似,TDC的模糊运算采用Mamdani型的模糊推理方式. 最终输出量为主电机输出转矩分配系数Kf2_out,该变量的基本论域为[0, 1],包含9个模糊子集. 系数Kf2_out与主、辅电机输出转矩的关系为
可以看出,DFCCS分2步完成主电机目标输出转矩的控制. 首先,ORAAC根据需求转矩的位置与需求转矩的变化幅度对主电机工作区间进行调节. 在此基础上,TDC通过系数Kf2_1确定需求转矩在区间内的位置,并通过对变量Kf2_out的控制确定主电机输出转矩在区间内的精确位置. 这一过程实现了对电机工作区间的自适应调整与等效放大,有利于系统控制精度的提高.
3. 基于遗传算法自动生成模糊控制规则
模糊控制规则是模糊控制器的核心,以往依据专家经验制定控制规则的方法具有一定的主观性,难以达到全局最优的控制效果[16]. 随着模糊控制系统复杂程度的增加,使用专家经验法制定控制规则的工作量与难度也会增加,因此专家经验法不宜应用于本研究的双模糊控制器控制系统. 遗传算法作为智能优化算法,具有全局性、并行性和鲁棒性等优点,对于复杂空间内的非线性问题可以保证较好的寻优效果[17]. 针对上文所制定的控制目标,选择驱动系统能量转化效率与双电机转矩脉动系数为自变量构建适应度函数,基于遗传算法对模糊控制规则进行智能寻优,完成遗传算法-双模糊控制器(genetic algorithm-dual fuzzy controller,GA-DFC)控制策略.
3.1. 确定适应度函数
根据汽车动力学方程,驱动车辆运行所需要的功率为
式中:ηt为传动系效率,δ为汽车旋转质量换算系数,m为汽车整备质量,v为汽车行驶速度,a为汽车行驶加速度,g为重力加速度,f为滚动阻力系数,Cd为空气阻力系数,A为迎风面积.
相应的系统等效输入功率为
式中:ηM1、ηM2分别为驱动状态下电机M1、M2的工作效率,ηB_dis为电池的放电效率.
由此,可以将驱动系统的能量转化效率表示为
式中:Tmax、Tmin分别为车辆运行过程中电机所输出的最大转矩与最小转矩,Tav为平均转矩.
驱动转矩的分配可能对动力性能造成影响,因此,对适应度函数设置相应的惩罚算子:
式中:Vact为实际车速,Vobj为目标车速.
若τ超过限值,则对适应度函数值进行相应的惩罚. 综上,将适应度函数定义为
式中:i为个体序号;α1为系统能量转化效率变换系数;α2、α3分别为辅、主电机转矩脉动变换系数,通过α2、α3可以实现对电机转矩脉动优化侧重的调整;α4为惩罚算子变换系数;TM1_rip(i)、TM2_rip(i)分别为电机M1、M2的转矩脉动系数;f(τ(i))为动力性约束条件惩罚算子函数.
3.2. 基于遗传算法的模糊控制规则寻优
采用十进制编码的方式将ORAAC与TDC的控制规则库编码于同一条染色体的不同基因位,基于如图8所示流程图进行控制规则自动寻优. 使用随机生成的方法产生初始种群,种群大小p=100,选择运算使用轮盘赌选择算子,交叉运算使用均匀交叉算子,变异运算使用基本位变异算子,交叉概率Pi=0.7,变异概率Pm=0.05,代沟gap=0.9. 寻优过程是在时域中基于动态仿真完成的,当进化至终止进化代数Gmax时结束仿真运算. 图中,chrom为当前种群,ORAAC.rule(j)与TDC.rule(j)分别为ORAAC与TDC的第j条模糊控制规则,bit.ORRAC与bit.TDC分别为个体中2种控制器的模糊控制规则所占的基因位数,G为当前代数.
图 8

图 8 基于遗传算法的模糊控制规则自动寻优流程图
Fig.8 Flowchart of fuzzy control rule automatic optimization based on genetic algorithm
初始种群所有个体的适应度分布情况如图9所示. 可以看到,在迭代寻优的过程中惩罚算子对包含不合理基因片段的个体进行了有效惩罚,降低了其被选择的概率. 同时,算法会选择高适应度的个体进行交叉、变异运算,使用新生成的个体替换上一代中适应度较低的个体,形成新的种群. 随着寻优进程的发展,种群中高适应度的个体越来越多,最优个体也逐渐接近问题的最优解. DFCCS与传统的三输入单输出模糊控制系统(three input single output fuzzy control system,TISOFCS)各代最优个体的适应度变化对比情况如图10所示. 图中,Fopt(G)为最优个体适应度. 可以看出,传统的TISOFCS最优个体进化到第56代就陷入了停滞,终代种群最优个体的目标函数值为7.619. DFCCS通过TDC对电机工作区间进行等效放大,有效提高了模糊控制系统的控制精度,终代种群最优个体的目标函数值为7.643,达到了更好的寻优效果. 对DFCCS寻优终代种群的最优个体进行解码,得到ORAAC、TDC各输入、输出变量的关系曲面图分别如图11、12所示.
图 9

图 9 初始种群个体的适应度分布
Fig.9 Distribution of fitness values of individuals in initial population
图 10
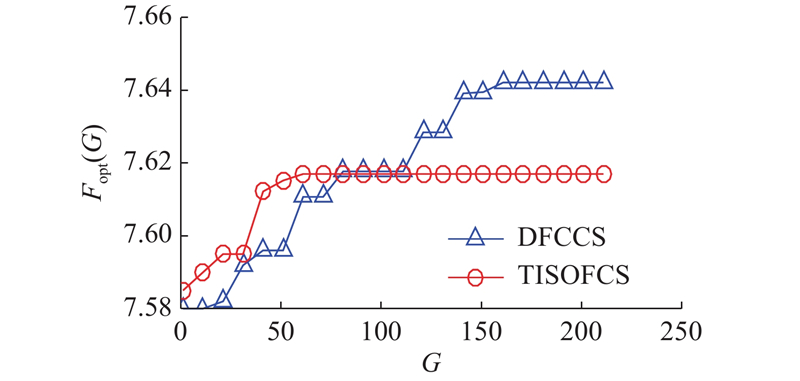
图 10 DFCCS与TISOFCS最优个体的适应度变化对比
Fig.10 Comparison of changes in fitness values of DFCCS and TISOFCS optimal individuals
图 11

图 12

4. 仿真与分析
为了验证控制策略的有效性,基于Matlab/Simulink仿真平台建立包含双电机驱动系统的双行星排PHEV整车前向仿真模型,并在CLTC-P工况下进行仿真实验. M2-EWR与GA-DFC这2种控制策略下车辆的车速跟随情况如图13所示,可以看出,2种策略下车辆都表现出了较好的车速跟随能力.
图 13
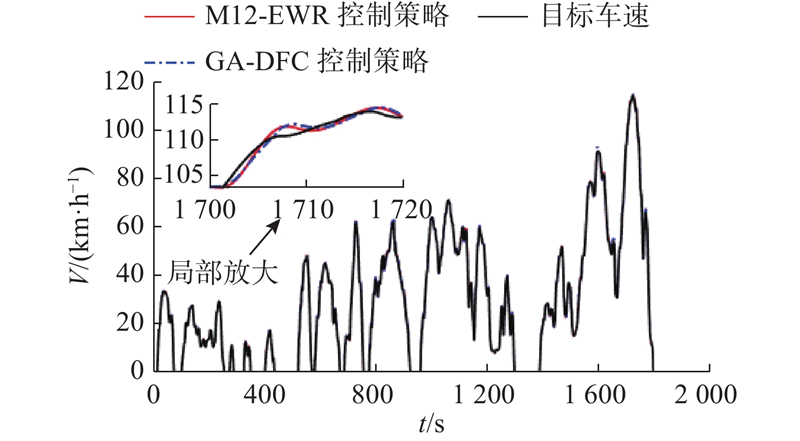
图 13 CLTC-P工况下2种策略的车速跟随结果
Fig.13 Speed following results of two strategies under CLTC-P condition
4.1. 经济性仿真与分析
车辆行驶经济性是转矩分配控制策略的重要评价指标. 为了客观体现M2-EWR与GA-DFC这2种控制策略下车辆的经济性水平,将相应的实验结果与动态规划(dynamic programming,DP)经济性最优优化结果进行对比. 动力电池荷电状态(state of charge,SOC)变化轨迹的仿真结果如图14所示,经过1个CLTC-P循环,GA-DFC控制策略下的动力电池SOC由0.9500下降到了0.8357,下降幅度比M2-EWR控制策略减小了5.6%.
图 14
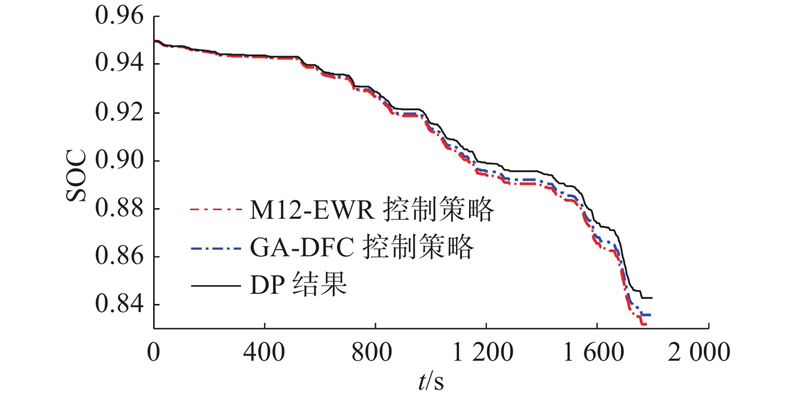
图 14 3种控制方式下动力电池SOC的变化轨迹
Fig.14 Power battery SOC change track under three control methods
为了进一步对M2-EWR与GA-DFC这2种控制策略下动力系统的工作情况进行分析,定义双电机系统综合效率为
式中:PM1、PM2分别为辅、主电机的输出功率.
双电机系统综合效率分布的仿真结果如图15所示,对应的数据统计结果如表1所示. 从数据统计结果来看,M2-EWR控制策略下系统综合效率在0.9以上的工作点占全部工作点的72.90%,但是由于该策略以保护主电机工作效率为主要原则,辅电机的工作效率得不到保障,影响了双电机系统综合效率的进一步提高,同时造成个别工作点的系统综合效率极低;GA-DFC控制策略是以整个驱动系统的能量转换效率为自变量构建适应度函数,通过遗传算法迭代寻优得到的,系统综合效率在0.9以上的工作点占75.27%,与M2-EWR控制策略相比提高了3.25%,在0.8以下的工作点占0.20%,与M2-EWR控制策略相比降低了85.40%,双电机系统整体的效率分布情况更接近DP优化结果. 可以看出,2种控制策略中GA-DFC控制策略实现了对于外界清洁电能更高效的利用. 因此,在相等电量消耗的情况下该策略可以实现更远的纯电续驶里程,降低了车辆对于化石能源的依赖,对于插电式混合动力汽车具有更大的意义.
表 1 双电机系统综合效率分布统计表
Tab.1
| % | ||||||
| 控制方法 | 各综合效率区间 | |||||
| 0.75~0.80 | 0.80~0.85 | 0.85~0.90 | 0.90~0.93 | 0.93~0.95 | 0.95~1.00 | |
| M2-EWR控制策略 | 1.37 | 8.17 | 17.56 | 22.48 | 30.28 | 20.14 |
| GA-DFC控制策略 | 0.20 | 7.51 | 17.02 | 24.09 | 30.03 | 21.15 |
| DP结果 | 0.20 | 6.74 | 14.88 | 25.26 | 28.76 | 24.16 |
图 15
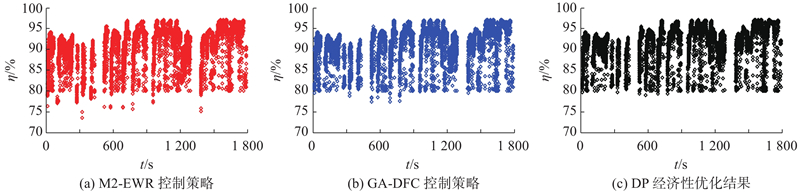
图 15 3种控制方式下双电机系统综合效率分布
Fig.15 Comprehensive efficiency distribution of dual-motor system under three control methods
4.2. 电机转矩输出情况仿真与分析
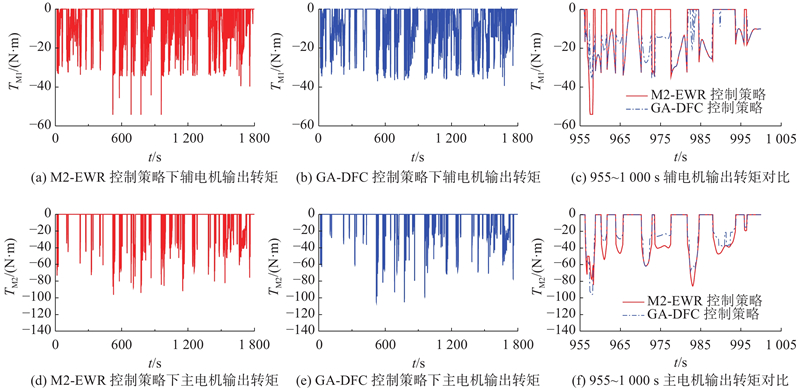
M2-EWR与GA-DFC控制策略下电机的输出转矩仿真结果如图16所示,对应的转矩脉动系数数据统计结果如表2所示. 从图16(a)、(b)、(c)辅电机输出转矩对比情况可以看出,与M2-EWR控制策略相比,GA-DFC控制策略下辅电机M1转矩波动的剧烈程度得到了明显改善,对于负载能力较差的辅电机而言,有利于解决转矩变化量分配不合理带来的电机过载问题. 与此同时,主电机M2转矩波动的剧烈程度略有增加,这是因为考虑到辅电机M1更容易受到大转矩脉动的影响,在遗传算法迭代寻优的过程中对式(17)中的系数α2、α3进行了调节,使得辅电机M1转矩脉动系数的降低更有利于个体适应度的提高. 从图16(d)、(e)、(f)主电机输出转矩对比情况来看,尽管在GA-DFC控制策略下电机M2的转矩脉动系数有所增加,但是基本不会带来电机过载的问题. 综上,在2种控制策略中GA-DFC控制策略对于电机输出转矩波动情况的控制更加合理.
表 2 双电机转矩脉动系数统计表
Tab.2
| 控制方法 | TM1_rip | TM2_rip |
| M2-EWR控制策略 | 13.9410 | 10.9568 |
| GA-DFC控制策略 | 7.8289 | 14.4511 |
图 16
4.3. 整车综合油耗仿真与分析
为了分析纯电驱动转矩分配策略对综合油耗的影响,将其集成到整车控制策略模型中进行多模式协调控制仿真实验,各模式间的切换逻辑如图17所示. 当需求转矩Treq<0时进入制动模式;当动力电池SOC小于最小值SOCmin或车速V达到混合动力模式切换阈值Ve或需求转矩Treq大于纯电模式最大输出转矩时,进入混合动力模式;否则保持纯电驱动模式. 仿真结果表明,GA-DFC控制策略下的车辆百公里综合油耗为6.573 L,较M2-EWR控制策略降低了3.27%.
图 17
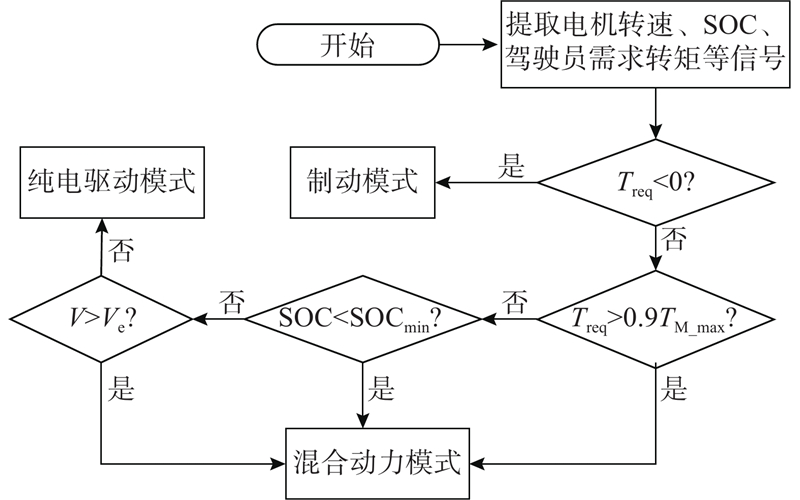
图 17 整车控制策略模式切换流程图
Fig.17 Flowchart of vehicle control strategy mode switching
5. 结 论
本研究以双行星排PHEV为被控对象,针对双电机系统纯电驱动的转矩分配问题,设计M2-EWR控制策略与GA-DFC控制策略. 基于计算机仿真的方式对控制策略的有效性进行验证,实验结果表明:
(1)与M2-EWR控制策略相比,通过遗传算法多目标寻优得到的GA-DFC控制策略的经济性控制效果更优,对双电机输出转矩波动情况的控制也更加合理,为双电机纯电驱动系统的经济性优化问题以及由转矩变化量分配不合理造成的小电机过载问题提供了解决思路.
(2)与之前基于模糊控制系统进行的驱动转矩控制研究相比,所设计的双模糊控制器控制系统实现了电机工作区间的自适应调整与等效放大,在一定程度上克服了传统模糊控制器控制精度不高的缺陷.
在今后的研究工作中,一方面将继续优化双行星排PHEV各工作模式的能量管理控制策略;另一方面将基于V模型开发流程,进行“代码生成及硬件在环测试”工作.
参考文献
双轴驱动纯电动汽车驱动转矩的分配控制策略
[J].
Control strategy of driving torque distribution for two-alex drive electric vehicle
[J].
基于电机损耗机理的双电机四轮驱动电动车转矩分配策略的研究
[J].
A research on torque distribution strategy for dual-motor four-wheel-drive electric vehicle based on motor loss mechanism
[J].
电动汽车驱动力分层控制策略
[J].
Driving force hierarchical control strategy of electric vehicle
[J].
A terminal sliding mode based torque distribution control for an individual-wheel-drive vehicle
[J].DOI:10.1631/jzus.A1400101 [本文引用: 1]
Real-time torque-distribution strategy for a pure electric vehicle with multiple traction motors by particle swarm optimization
[J].DOI:10.1049/iet-est.2014.0050 [本文引用: 1]
Optimal component sizing of a four-wheel independently-actuated electric vehicle with a real-time torque distribution strategy
[J].DOI:10.1109/ACCESS.2018.2801564 [本文引用: 1]
混合动力系统节油影响因素
[J].
Fuel-saving factors for hybrid electric system
[J].
一种三模式混合动力汽车的行车工况简要分析
[J].
Brief analysis on driving cases of a tri-mode hybrid electric vehicle
[J].
混合动力电动汽车机电耦合系统归类分析
[J].
Classification of electromechanical coupling systems in hybrid electric vehicles
[J].
混合动力汽车电机最优工作曲线确定与应用
[J].
Motor optimal operation line's establishment and application of HEV
[J].
Optimal fuzzy power control and management of fuel cell/battery hybrid vehicles
[J].DOI:10.1016/j.jpowsour.2009.03.007 [本文引用: 1]
A fuzzy logic approach by using particle swarm optimization for effective energy management in IWSNs
[J].DOI:10.1109/TIE.2017.2711548 [本文引用: 1]
混合动力汽车模糊控制策略优化
[J].DOI:10.3969/j.issn.1000-680X.2016.01.002 [本文引用: 1]
Optimization of fuzzy control strategy for hybrid electric vehicle
[J].DOI:10.3969/j.issn.1000-680X.2016.01.002 [本文引用: 1]
并联式混合动力汽车遗传模糊控制策略的研究
[J].
A research on the genetic fuzzy control strategy for parallel hybrid electric vehicle
[J].
Commutation ripple torque and suppression method for permanent magnet brushless DC motor
[J].
Analysis of torque ripple and fault-tolerant capability for a 16/10 segmented switched reluctance motor in HEV applications
[J].DOI:10.1108/COMPEL-11-2018-0477 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}