

海上风电正逐步走向深海,当水深大于50 m时,浮式风力机比固定式风力机更具经济性[1]. 目前,浮式风力机支撑平台主要包括Spar型、半潜型、张力腿型等型式. 其中,张力腿型浮式风力机的支撑平台与系泊系统的设计思想均来源于张力腿平台(tension leg platform,TLP),采用垂向张紧的张力腿系泊系统,运动响应较小,有利于风机的工作. 极端海况(如50 a一遇海况)中的高阶波浪载荷会引起张力腿平台产生高频弹振(springing)和超高频弹振(ringing)2种非线性动力响应[2],导致张力腿系泊系统筋腱失效,甚至导致平台损毁. 2005年,飓风Rita使得工作于墨西哥湾的张力腿平台Typhoon TLP发生筋腱失效事故,最终产生倾覆[3]. 相较于张力腿平台,张力腿型浮式风力机重心高,在工作过程中还受到风力机空气动力载荷和风倾力矩的作用[4],系统各组成部分之间耦合效应明显[5],对筋腱系统的可靠性要求更高,因此研究筋腱失效模式下张力腿型浮式风力机的瞬态响应是必要的.
近年来,浮式风力机系泊系统失效模式下的瞬态动力响应研究引起了学术界的持续关注. Bae等[6]研究OC4-DeepCwind半潜型浮式风力机在工作海况下发生单根锚链失效后的响应,结果表明锚链失效会导致平台产生超过700 m的漂移运动,同时对锚链张力和机舱偏航误差产生一定影响. Li等[7]研究OC3-HywindSpar型浮式风力机在额定海况下发生单根锚链失效后的响应,发现风电场中发生锚链失效的风力机会给相邻风力机带来碰撞风险. 施伟等[8]研究额定海况下单根及2根锚链失效对OC4-DeepCwind半潜型浮式风力机动力响应的影响,结果表明,在单根锚链失效后,浮式风力机的纵荡运动响应会大幅增加.
挪威船级社(DNV GL)指出在设计浮式风力机的系泊系统时,应考虑单根系泊缆失效的意外极限状态(accidental limit state),从而保证系泊系统有足够的安全裕度[9]. 美国船级社(ABS)和日本船级社(ClassNK)均指出,按照是否考虑系泊失效引起的瞬态响应,浮式风力机单根系泊缆失效的设计工况分为2种:一种是考虑瞬态响应的系泊失效工况,即浮式风力机运动在系泊失效后先产生瞬态响应,之后达到新的平衡状态;另外一种是不考虑瞬态响应的系泊失效工况,即仅考虑浮式风力机重新达到平衡状态下的系泊系统稳态响应[10-11]. 美国船级社和日本船级社均规定了单根系泊缆失效工况下的系泊系统安全系数:美国船级社要求考虑瞬态响应的系泊失效设计海况应为50 a一遇,对应的安全系数为1.05;日本船级社则要求系泊失效的设计海况至少为1 a一遇,按照是否考虑瞬态响应,规定了2种安全系数.
1. 多立柱张力腿型浮式风力机
图 1
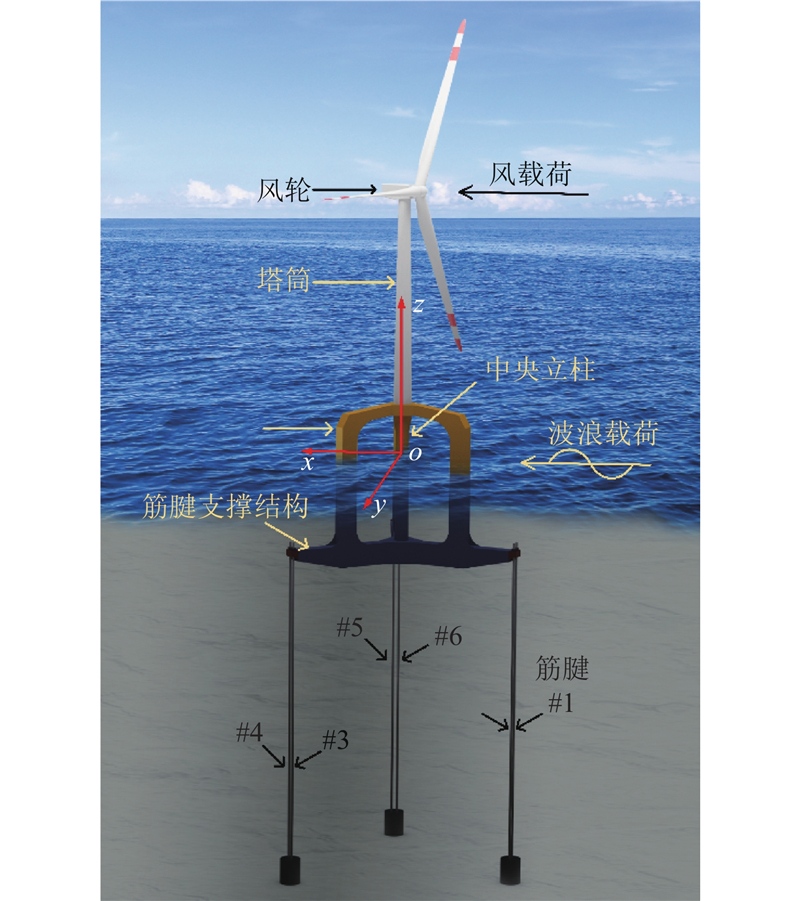
图 1 多立柱张力腿型浮式风力机概念示意图
Fig.1 Illustration of multi-column TLP floating wind turbine
表 1 多立柱张力腿型浮式风力机主要参数
Tab.1
| 参数 | 单位 | 数值 |
| 设计吃水 | | 30.0 |
| 排水量 | | 5466.0 |
| 下浮体重心高度 | | 24.6 |
| 筋腱总预张力 | | 2370.0 |
| 筋腱直径 | | 227.0 |
| 筋腱干重 | | 35.4 |
| 筋腱轴向刚度 | | 391.0 |
| 筋腱最小破断载荷 | | 17.26 |
2. 数值模型
2.1. 运动方程
考虑风机、塔架、支撑平台和系泊系统非线性耦合的浮式风力机时域运动方程为
式中:
2.2. 气动载荷
使用经典的叶素动量理论(blade-element momentum theory,BEM)进行气动载荷的计算. 根据叶素动量理论,整个叶片所受的推力、扭矩如下:
式中:
在风轮实际运行过程中,风轮平面上由尾涡诱导的速度分布不均匀,导致诱导速度变化和来流变化在时间上不同步,因此当风速大于8 m/s时,引入广义动态尾流模型,修正未考虑动态入流的BEM方法[15].
2.3. 水动力载荷
支撑平台所受水动力载荷主要包括静水力
考虑一阶波浪激励力和二阶波浪激励力,表达式分别为
式中:
2.4. 系泊载荷
图 2
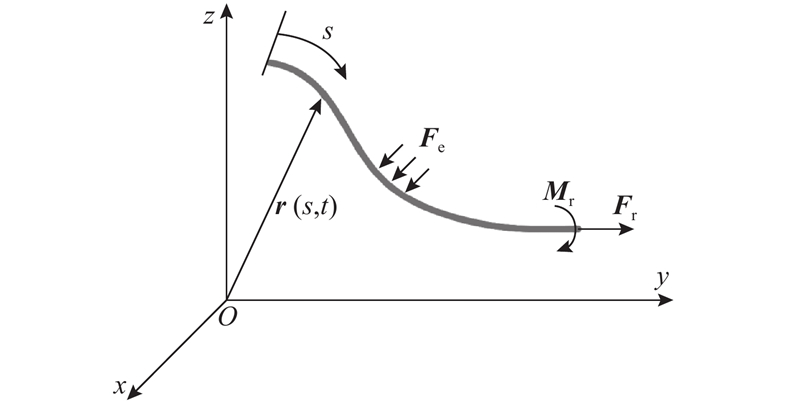
单位长度弹性杆的力与力矩平衡方程为
式中:
考虑到杆所受重力、静水力和水动力,运动方程可以写为
式中:
假定弹性杆是可拉伸的,并且伸长是线性且微小的,关于杆的变形协调条件可以近似为
式中:
式(9)、(10)构成了弹性杆的控制方程. 该方程是非线性的,难以解析求解,所以应用有限元方法,将弹性杆离散成数个单元,将控制方程转化成代数方程,进行数值求解[17].
2.5. 筋腱失效模式下全耦合动力模型建立
图 3
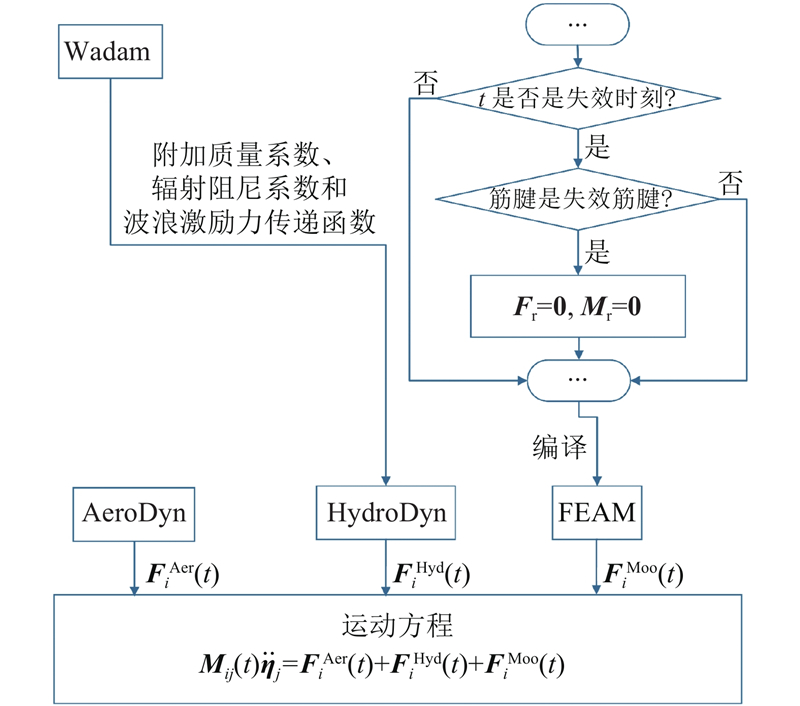
为了模拟筋腱失效,通过修改FAST系泊载荷计算子模块FEAM的源代码,增加对筋腱失效时刻、失效筋腱的定义,使得指定失效筋腱在指定失效时刻后所受力
2.6. 筋腱失效工况
所研究的是三立柱结构支撑平台,当位于同一立柱下的2根筋腱均发生失效时,平台会失去稳性,进而倾覆,因此研究单根筋腱失效. 选取位于不同位置的单根筋腱失效,根据支撑平台和筋腱系统的对称性,分别选取筋腱#1和筋腱#3作为失效筋腱,作为对比,也模拟了筋腱完整的工况.
WindStar TLP system的预定安装地点位于北纬
表 2 筋腱失效工况定义
Tab.2
| 工况 | 失效 筋腱 | | | | | D /(°) |
| 1 | 无 | 47.5 | 13.8 | 19.2 | 2.4 | 0~360 |
| 2 | #1 | 47.5 | 13.8 | 19.2 | 2.4 | 0~360 |
| 3 | #3 | 47.5 | 13.8 | 19.2 | 2.4 | 0~360 |
图 4

针对每种工况,进行6次单次时长为1 h的模拟,每次模拟选取不同的风速种子和波浪种子,取6次仿真结果的统计值的平均值作为最终统计值. 设定筋腱失效发生在第300 s.
3. 计算结果及讨论
3.1. 固有周期
为了研究WindStar TLP system在筋腱完整时以及筋腱失效模式下的运动固有周期,分别考察其在静水中的自由衰减运动以及筋腱失效模式下的运动响应. 利用傅里叶变换,将各自由度运动的时域响应转换为频域响应,频域响应谱峰值点对应的横坐标即为固有频率,如图5所示. 图中,
表 3 多立柱张力腿型浮式风力机的运动固有周期
Tab.3
| s | ||||||
| 工况 | Tsur | Tswa | Thea | Trol | Tpit | Tyaw |
| 筋腱完整 | 45.50 | 45.50 | 3.66 | 4.87 | 4.87 | 25.60 |
| 筋腱#1失效 | 45.53 | 45.53 | 3.94 | 4.87 | 6.40 | 25.65 |
| 筋腱#3失效 | 45.53 | 45.53 | 3.94 | 6.40 | 6.40 | 25.65 |
图 5
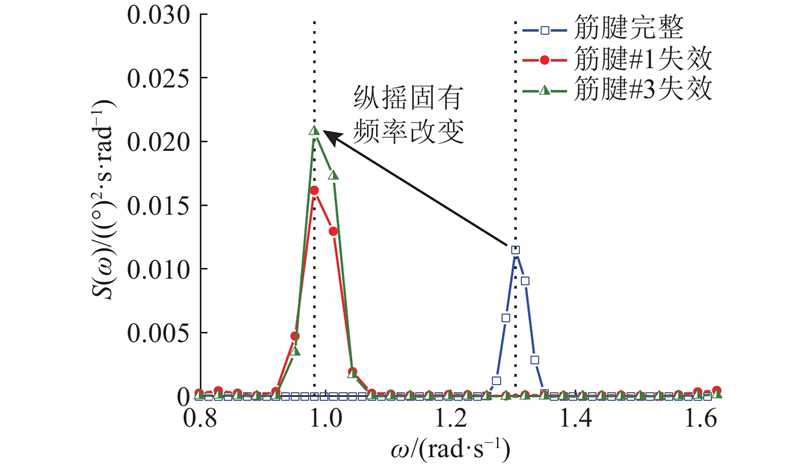
图 5 静水中筋腱失效模式下纵摇功率谱
Fig.5 Power spectral density of pitch under tendon failure in still water
3.2. 平台运动响应
图 6

图 7
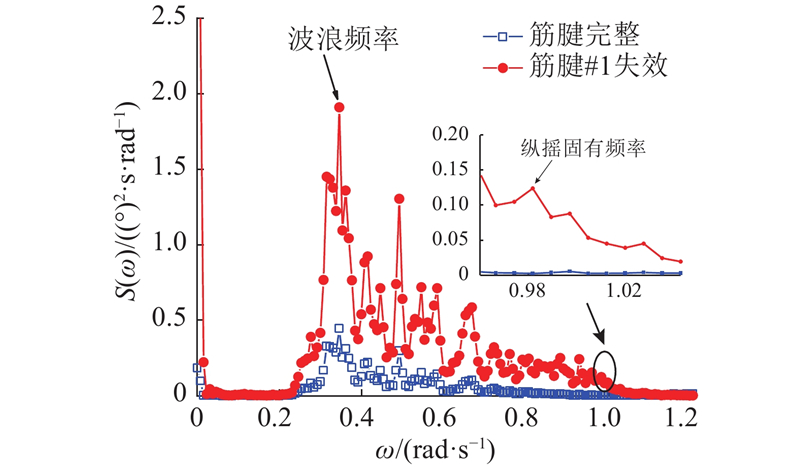
图 7 180°浪向下纵摇功率谱
Fig.7 Power spectral density of pitch under wave direction of 180°
如图8所示为不同浪向下筋腱失效后的平台纵摇、横摇响应最大值. 筋腱#3所处位置与风载荷入流方向不共线,其失效会导致较大的横向运动响应,因此须研究不同浪向下筋腱#3失效后的平台横摇运动响应. 结合筋腱#1、#3的位置可知,对于同一失效筋腱,其位于背浪侧时的平台角运动响应明显大于其位于迎浪侧时的平台角运动响应. 当浪向为180°时,筋腱#1失效下的纵摇运动响应最大,当浪向为60°时,筋腱#3失效下的横摇运动响应最大,说明当位于背浪侧的失效筋腱与波浪共线时,平台的角运动响应最大.
图 8
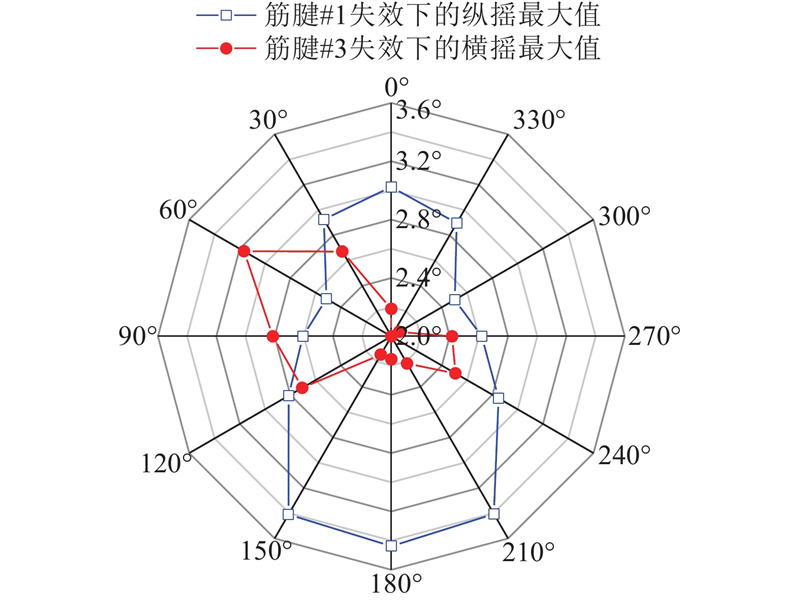
图 8 不同浪向下纵摇、横摇最大值
Fig.8 Maximum pitch and roll under different wave directions
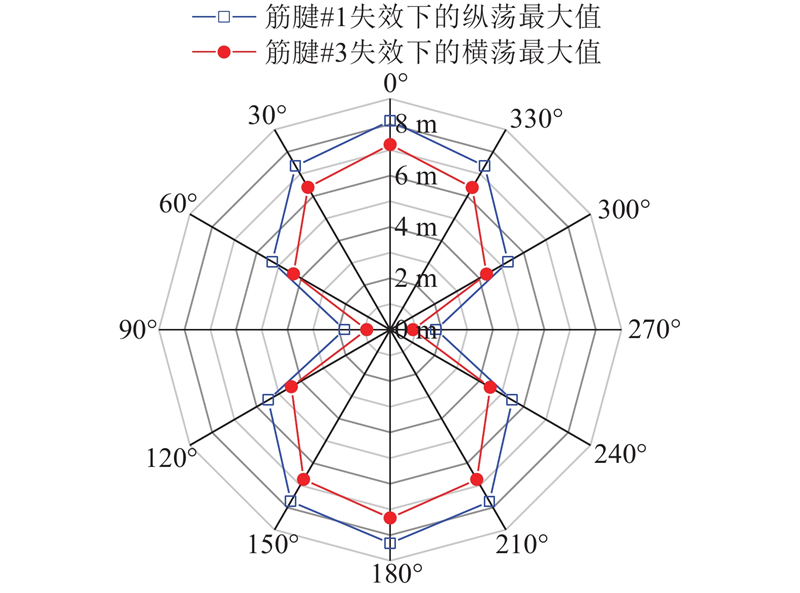
如图9所示为不同浪向下筋腱失效后的平台纵荡运动响应最大值. 当浪向为180°时,纵荡运动响应最大,当浪向为90°或270°时,纵荡运动响应最小. 当浪向为180°时,纵荡运动最大;当波浪为90°或270°入射时,波浪载荷垂直于纵荡方向,在所有浪向中对纵荡运动的贡献最小,因此纵荡运动响应最小. 在各个浪向下,筋腱#1失效后的纵荡运动响应均大于筋腱#3失效后的纵荡运动响应,筋腱#1的失效对纵荡运动响应影响更大.
图 9
3.3. 机舱加速度响应
在筋腱完整工况和筋腱#3失效工况中,60°浪向下的机舱横荡加速度时间历程如图10所示. 图中,Answ为机舱横荡加速度. 在筋腱#3失效后,机舱横荡加速度产生明显波动,最大值为2.37
图 10

图 10 60°浪向下机舱横荡加速度时间历程
Fig.10 Time series of nacelle sway acceleration under wave direction of 60°
不同浪向下筋腱失效后的机舱加速度响应最大值统计结果如图11所示. 根据筋腱#1、#3所在位置与风载荷入流方向的关系,分别研究筋腱#1失效下的机舱纵荡加速度与筋腱#3失效下的机舱横荡加速度. 结果表明,筋腱#1失效下的机舱纵荡加速度受浪向的影响较小;筋腱#3失效下的机舱横荡加速度在浪向为60°时达到最大值,与筋腱#3失效下横摇运动响应的变化规律相似.
图 11
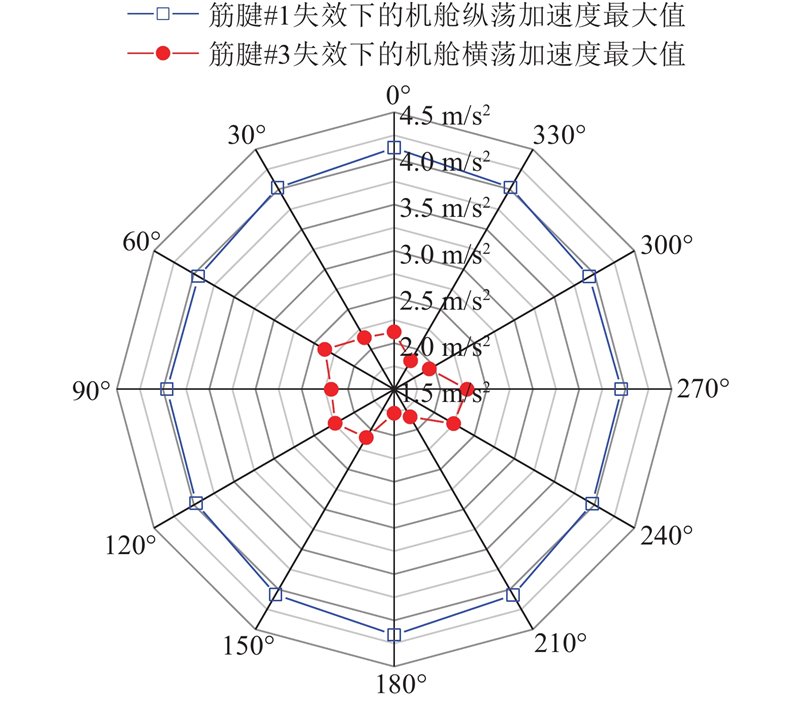
图 11 不同浪向下机舱加速度最大值
Fig.11 Maximum nacelle acceleration under different wave directions
3.4. 张力腿筋腱张力响应
在180°浪向下,筋腱#1失效后剩余筋腱张力Tten时间历程如图12所示,在筋腱#1失效后,筋腱#2张力显著增大,其最大值为13.95
图 12
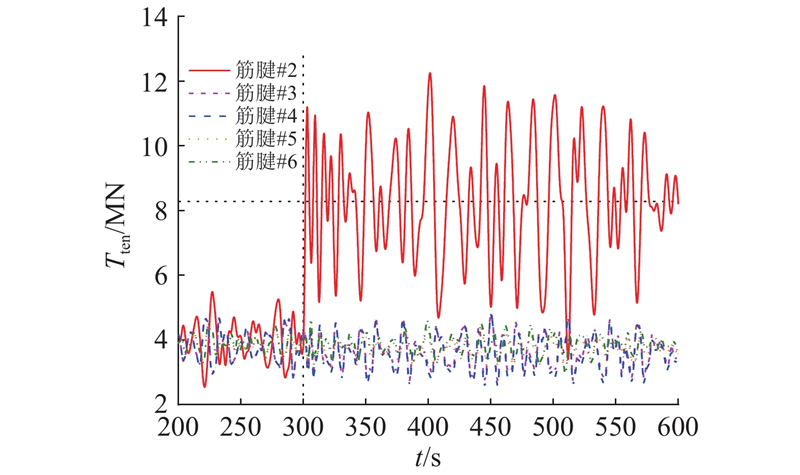
图 12 180°浪向下筋腱#1失效后剩余筋腱张力时间历程
Fig.12 Time series of tensions in remaining tendons under wave direction of 180° in tendon #1 failure condition
在180°浪向下,筋腱完整工况和筋腱#1失效工况中的筋腱#2张力功率谱如图13所示. 图中,Sten(ω)为张力功率谱. 可以看出,相较于筋腱完整工况下的张力功率谱,筋腱#1失效后的筋腱#2张力功率谱值明显增大,主要体现在波浪频率处,体现了筋腱#1失效引起筋腱#2张力的显著增大.
图 13
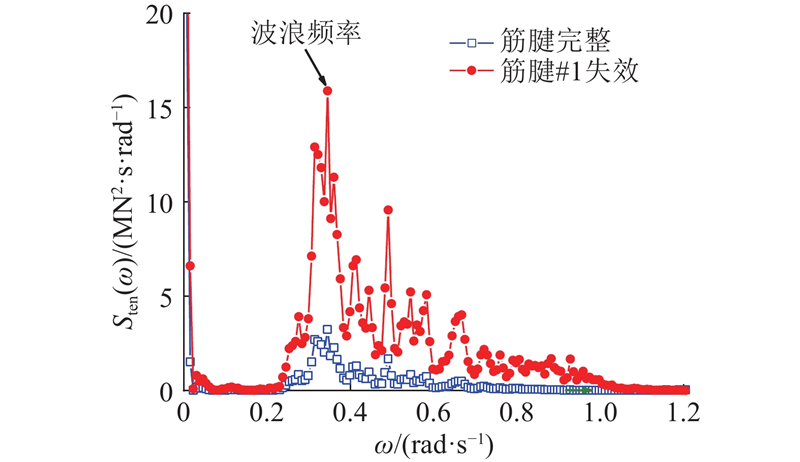
图 13 180°浪向下筋腱#2张力功率谱
Fig.13 Power spectral density of tendon #2 tension under wave direction of 180°
在筋腱失效后,最邻近失效筋腱的筋腱所受张力在整个筋腱系统中最大,因此研究不同浪向下筋腱#1失效后的筋腱#2张力最大值以及筋腱#3失效后的筋腱#4张力最大值,如图14所示. 结果表明,在筋腱#1失效后,筋腱#2的张力值在浪向为180°时达到最大,而在筋腱#3失效后,筋腱#4的张力值在浪向为60°时达到最大. 这与筋腱失效后的角运动随浪向的变化一致. 在筋腱#1失效工况中,当浪向为180°时,筋腱#2最危险,其最小筋腱张力为2.27
图 14

图 14 不同浪向下筋腱张力最大值
Fig.14 Maximum tendon tension under different wave directions
4. 结 论
(1)在筋腱失效模式下,WindStar TLP system的运动固有周期发生改变,其中垂荡、横摇、纵摇运动响应固有周期明显增大,其余自由度所受影响较小.
(2)在50 a一遇海况下,WindStar TLP system的支撑平台运动、机舱加速度、筋腱张力在筋腱失效后的瞬态响应较显著,其中,在180°浪向下,筋腱#1失效工况中的浮式风力机纵摇运动响应最大值为筋腱完整工况下最大值的3.35倍,筋腱#2张力最大值为筋腱完整工况下最大值的2.14倍;在60°浪向下,筋腱#3失效工况中的机舱横荡加速度最大值为筋腱完整工况下最大值的2.29倍.
(3)对于同一失效筋腱,位于背浪侧时的浮式风力机瞬态响应大于位于迎浪侧时的瞬态响应,当位于背浪侧的失效筋腱与波浪共线时,浮式风力机瞬态响应最大. 在筋腱#1失效工况中,当浪向为180°时,纵摇响应、筋腱#2张力响应达到最大;在筋腱#3失效工况中,当浪向为60°时,横摇响应、机舱横荡加速度响应和筋腱 #4张力响应达到最大.
(4)在筋腱#1失效工况中,当浪向为180°时,筋腱#2最危险,张力最大值为13.95
参考文献
新型浮式基础的海上风机系统动力响应研究
[J].
Research on dynamic response of offshore wind turbine system based on new semisubmersible-spar hybrid floating foundation
[J].
Investigation of TLP behavior under tendon damage
[J].DOI:10.1016/j.oceaneng.2018.03.019 [本文引用: 1]
Performance changes of a floating offshore wind turbine with broken mooring line
[J].DOI:10.1016/j.renene.2016.08.044 [本文引用: 1]
Transient response of a SPAR-type floating offshore wind turbine with fractured mooring lines
[J].DOI:10.1016/j.renene.2018.01.067 [本文引用: 1]
南海海况下半潜浮式风机在故障工况下的动力学响应分析
[J].
Dynamic analysis of semi-type floating offshore wind turbine with failure conditions under metocean
[J].
Preliminary design of a multi-column TLP foundation for a 5-MW offshore wind turbine
[J].DOI:10.3390/en5103874 [本文引用: 1]
新型6 MW单柱浮式风力机耦合运动分析
[J].
Motion response analysis of a new 6 MW Spar-type floating offshore wind turbine using coupled simulations
[J].
Coupled dynamic response analysis of a multi-column tension-leg-type floating wind turbine
[J].DOI:10.1007/s13344-016-0031-9 [本文引用: 1]
Dynamic response analysis of a multi-column tension-leg-type floating wind turbine under combined wind and wave loading
[J].
Experimental study on new multi-column tension-leg-type floating wind turbine
[J].DOI:10.1007/s13344-018-0014-0 [本文引用: 1]
张力腿式浮动风力机极限载荷分析
[J].
Extreme load analysis for a TLP-type floating wind turbine under operating conditions
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}