

由于机器视觉的快速、高效性,常用于零件的几何参数测量. 随着中国智能制造2025的推行,视觉将深入于加工现场零件的在线测量,而不是较理想的检测室. 在测量过程中将会伴随着照度的急剧变化问题,导致极大的视觉测量误差. 照度变化导致视觉测量系统误差占据整个系统误差的比重较大.
为了减少误差对视觉系统测量精度的影响,国内外学者们提出许多优化的方法. 主要从以下3大类进行优化:误差避免、误差控制以及误差补偿. 其中误差避免、误差控制均需要改进系统结构,如增加滤光片、合适光源或者将环境尽可能地理想化. 其中,误差补偿模型往往被认为是一种局限性小和经济性好的降低误差的方法,核心是如何在系统误差和影响因素之间建立有效的模型.
为了获得高精度和高鲁棒性的视觉测量系统误差模型,国内外学者研究了很多建立误差模型以及相应提高测量精度的方法.Ahn等[1]研究由于物平面和图像平面彼此不平行带来的测量误差特性,提出用于校正该系统偏心误差的方法. Cui等[2]研究基于Zernike矩的补偿边缘位置误差模型,通过补偿采样产生的微小变化,建立理论和实际边缘的子像素位置的数学模型,进一步提高视觉测量精度. 杨君等[3]提出利用最小二乘拟合法,估计质心位置和系统误差大小的对应关系,从而对系统误差进行补偿的方法. Yang等[4]研究基于差分进化算法(DEA)的人工神经网络(ANN),用于预测车削操作中的表面粗糙度. 邾继贵等[5]研究以特征点的中心位置、提取误差和能量密度函数的标准差之间关系为基础,利用离散化采样的最小二乘法进行曲线拟合进行误差补偿. Zhu等[6]针对相机光轴与工件表面的非垂直度和不正确的物距问题,研究2D视觉系统的误差测量和补偿原理,提出利用4个激光位移传感器的方法,建立非垂直度的测量误差模型. Wang等[7]针对机械圆柱形零件直径测量精度的提升的问题,提出误差修正模型,消除由中心轴和基准面之间的高度差引起的误差. Deng等[8]针对复杂环境下的光折射问题,分析如温度、光波长和相机参数之类的误差源. Li等[9]针对光学经纬仪的垂直读数在特定位值会产生系统误差,研究基于神经网络的误差补偿方法. Shen等[10]针对透视投影引起的圆形目标的偏心误差,研究扭曲椭圆的基准中心与物体圆心的真实投影关系,建立准偏心误差模型,提出偏心误差补偿框架,通过迭代地将图像点细化到圆心的真实投影来补偿误差. Liu等[11]针对基于视觉的位姿测量误差,提出考虑观察窗折射光的成像模型. Kłosowski等[12]提出具有优化特性的灰度CMOS图像传感器(CIS)表征系统. 通过使用快速和精确的照度控制,基于脉冲宽度调制方法,避免每次测量照度. 杜文华等[13]通过自适应照度变化的动态边缘位置提取方法,基于最小二乘的方法建立照度与误差之间的关系模型,对测量进行补偿. 以上方法在视觉测量系统误差的预测与补偿方面都取得了一些成功的应用,但是这些方法都存在一些局限性和不足之处:需要建立在一定设备的基础上,模型的设计比较耗时和繁琐,最小二乘法的拟合精度不高.
针对照度导致视觉测量系统误差的问题,将遗传算法优化的最小二乘支持向量机(GA-LSSVM)建模方法应用于视觉测量误差补偿. 在分析照度变化下的视觉测量系统变化的基础上,基于遗传算法优化的最小二乘支持向量机,建立视觉测量系统变照度误差模型. 搭建视觉测量系统误差实验平台,利用照度计与图像处理软件平台,分别采集视觉测量系统的照度数据与测量误差数据,从而训练GA-LSSVM并建立视觉测量系统照度误差预测模型. 由于GA-LSSVM具有处理非线性、小样本训练预测等方面的优越性,利用GA-LSSVM方法建立具有较高精度和鲁棒性的视觉测量系统照度误差预测模型,揭示照度变化与视觉测量系统误差之间的规律,提高视觉系统的测量精度.
1. 系统测量误差与照度的关系分析
1.1. 视觉测量系统误差来源分析
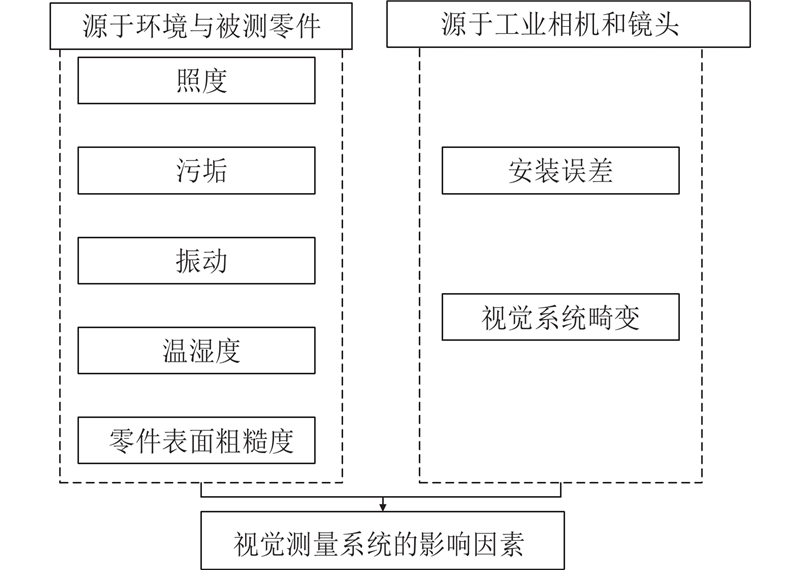
视觉系统不同于普通的测量手段,一方面具备快速、高效、精确、自动化等优势,一方面不可避免地存在自身难以弥补的缺陷. 在测量环境中,视觉测量系统容易受到各个方面的影响,特别是在机加工类别环境中,该环境存在照度变化、振动、灰尘加工零件表面铁屑等,很大程度上影响视觉测量结果. 除了环境与被测对象带来的挑战,工业相机及镜头存在很大的隐患,制造误差导致测量系统中存在不可避免的视觉畸变. 以上分别从各个方面分析致使视觉测量精度差的原因,研究总结影响因素可以归结为2部分,如图1所示.
图 1
1.2. 照度与误差的相关性分析
在特定的环境下,各个影响因素对视觉测量系统的影响程度不同,在实际工业应用中需要分析各个影响因素与视觉测量误差之间的相关性. 为了研究照度变化对视觉检测误差的影响,将检测环境选定为低振动、湿度变化程度低且零件表面光洁度好的情况,研究照度变化对检测误差的影响,建立照度与误差之间的关系模型. 为了得出照度与视觉测量系统误差之间的相关性,采用实验分析法进行相关性分析.
为了得出照度与系统误差的相关性,在保证其他因素不变的情况下,改变光源强度,得出在不同照度下照度计的测量值及被测物的误差,共进行60组测试. 可得误差Δ与3个位置照度总和Es的变化关系,如图2所示.
图 2
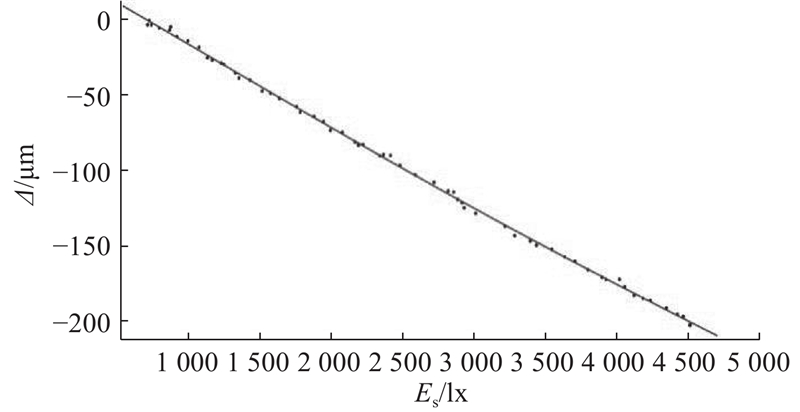
图 2 测量误差与3个位置照度总和的关系
Fig.2 Relation between measurement error and sum of illuminance of three positions’ illuminometer
依据拟合,可以输出模型如下:
式中:
从拟合曲线可以看出,测量误差会随着照度的增大而增大,通过4次多项式拟合可得照度与误差之间的初步关系,但是难以达到μm级的预测,存在一定的偏差.
2. 遗传算法优化的LSSVM视觉测量变照度误差模型
2.1. 遗传算法参数寻优
遗传算法是基于达尔文进化论思想和孟德尔遗传学理论思想的影响,借鉴自然界中优胜劣汰、适者生存的自然选择机制而产生的随机的种群搜索方法. 该算法通过基因交叉、基因突变和基因选择等过程模拟生物界遗传进化的过程,实现优化搜索空间,达到搜索全局最优解的目的[14].
遗传算法优化的误差模型实现过程如图3所示.
图 3
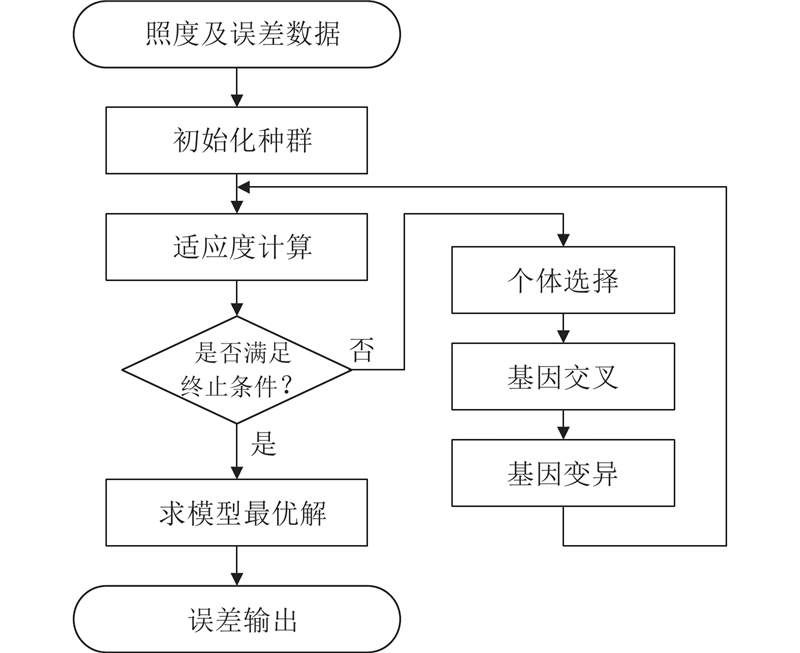
图 3 遗传算法变照度误差补偿模型方法
Fig.3 Genetic algorithm to compensate error model of changing illuminance
1)初始化种群.
2)由适应度函数
3)个体选择. 利用轮盘赌的选择方法实现个体选择,计算公式为
式中:
4)交叉操作. 交叉操作的目的是将所有候选个体中随机选中的某2个个体进行染色体上的基因交换,从而实现产生新个体的目的. 基因交叉实现过程如下:
式中:
5)变异操作. 变异操作的目的是为了保证种群的多样性,提高遗传算法在全局的搜索能. 力变异实现的过程如下:
式中:
2.2. GA优化的最小二乘支持向量机
为了提高LSSVM模型的预测精度,通过遗传算法对LSSVM模型进行参数寻优,建立基于数据驱动的最佳LSSVM模型. 基于GA方法的LSSVM误差补偿模型参数寻优过程如图4所示.
图 4

图 4 遗传算法优化的最小二乘支持向量机变照度误差补偿模型方法
Fig.4 GA optimized LSSVM variable illuminance error compensation model
由图4可知,利用GA实现LSSVM的参数优化. 根据优化目标对GA进行初始化,利用LSSVM模型定义适应度函数,在对LSSVM模型进行训练的同时计算与之相对应的适应度. 根据终止条件判断当前适应度是否满足要求,若不满足要求,则对种群进行更新,以获得新的个体继续迭代;若满足条件,则将搜寻到的最优解作为LSSVM的最佳模型参数. 为了提高模型的识别精度,采用遗传算法对LSSVM模型进行参数优化,初始种群大小为80,最大迭代次数为100,最终获得的最优参数
3. 照度误差预测实验与结果分析
3.1. 变照度下视觉系统误差实验
视觉测量系统主要由工业相机镜头、LED工业光源、照度计、支架及MVPlatform软件平台等构成. 工业相机采用的型号为MV-EM200M,分辨率为200 万像素;工业镜头采用的型号为AFT-1214MP,焦距为12 mm,靶面尺寸为12.7 mm;光源采用多个LED白色环形光源;照度计采用优利德UT382;目标检测对象为外精密加工实心轴,直径为25 mm. 通过以上硬件搭建视觉测量平台,将采集的图像传输至PC中,在MATLAB软件平台上进行图像处理,获得轴的外径误差. 基于测试分析,为了保证测量尺寸不受背景及算法的影响,采用背光源作为辅助光源,通过改变环形无影光源来改变照度,视觉系统的照度误差实验平台如图5所示. 在不同照度下采集轴的图像,采用Mvplaform视觉图像处理软件上处理采集的图像,初始照度下的图像处理边缘提取处理结果及原图上的拟合边缘如图6、7所示.
图 5
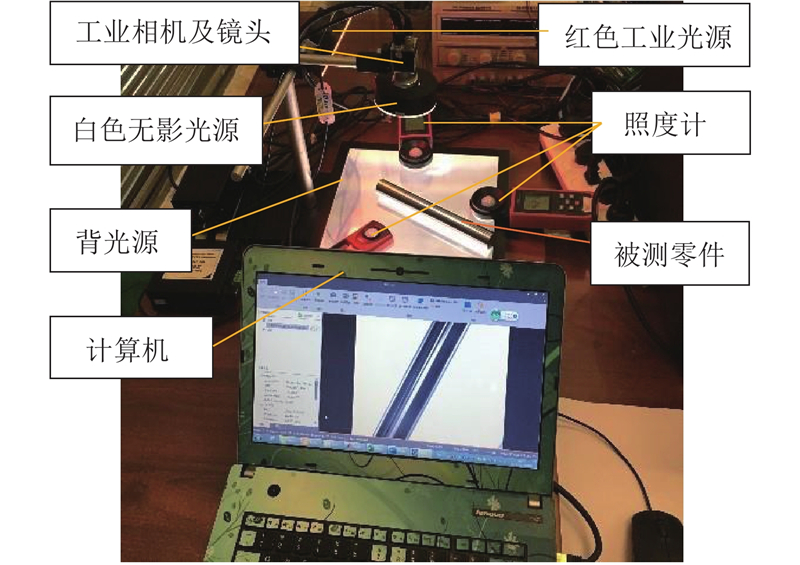
图 5 变照度误差检测实验平台
Fig.5 Experimental platform for error detection of changing illuminance
图 6
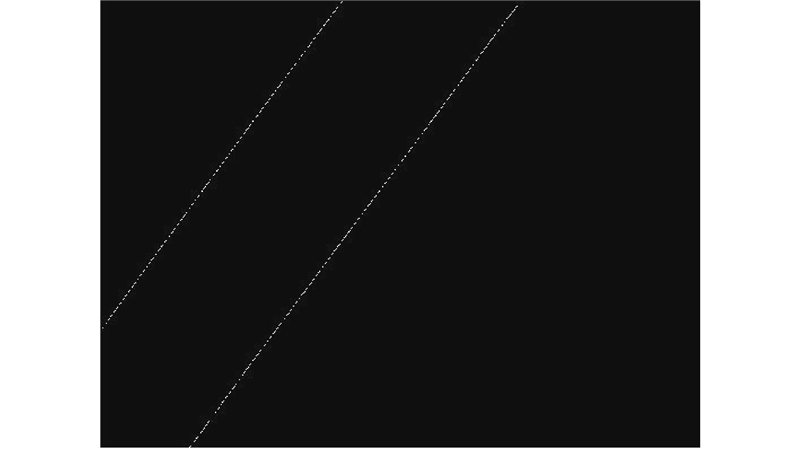
图 7
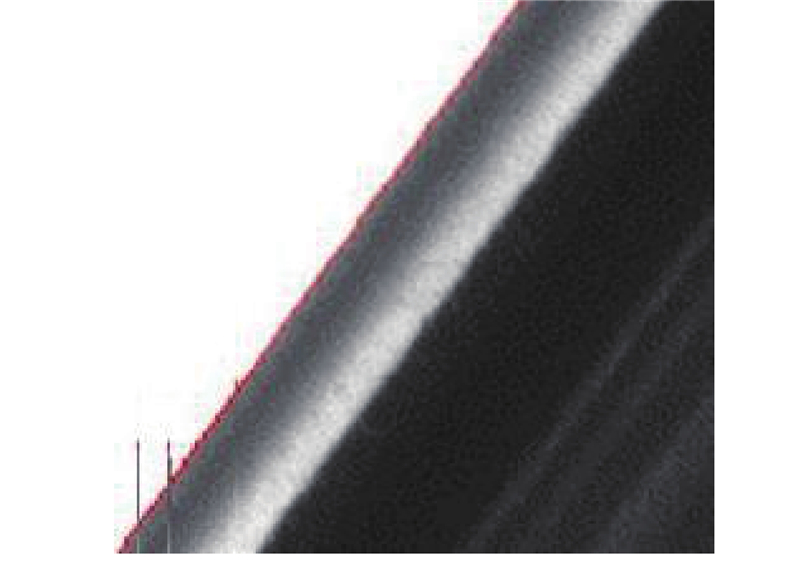
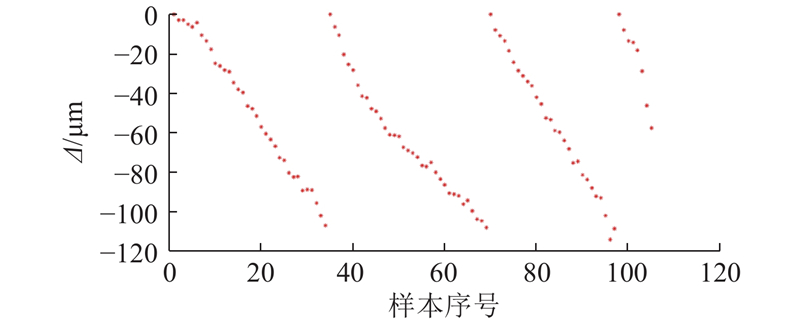
为了获得训练遗传算法优化的最小二乘支持向量机的数据和分析实际的视觉测量系统误差,搭建变照度下视觉系统误差实验平台. 总共采用3个照度计,其中2个照度计量程为10 000 lx,1个照度计量程为20 000 lx. 依据三点确定一个圆的原理,采取三点位置设计的方式对照度进行采集,保证三点构建的圆形结构范围内采集的照度的有效性. 为了尽可能多地获得照度和视觉测量系统误差,提高模型的预测精度,总共采集不同照度数据及图像近200组. 通过上述方法,在不改变图像处理算法参数的情况下,获取检测轴的中心位置尺寸,如图6、7所示. 对图像进行二值化处理,对2条直线进行拟合,求取2条直线之间的距离,依次对采集的图像进行处理,求取相应的轴外径. 考虑实际检测过程中,照度不会发生过大的变化,所以将大于1 200 lx照度数据及对应的误差数据过滤排除,剩余数据105组. 3个照度计照度E如图8所示;随着照度的不断增大,原始误差变化如图9所示.
图 8
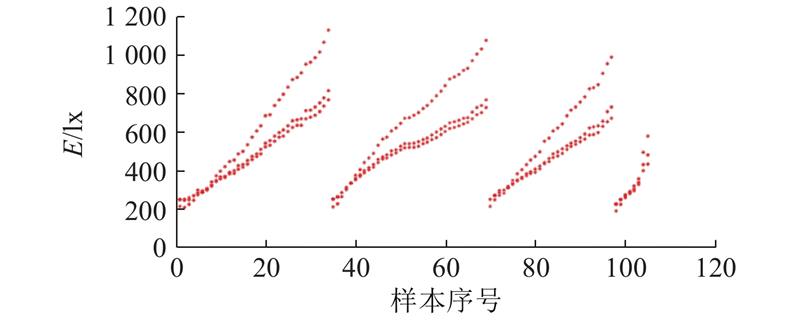
图 8 3个不同位置照度计照度数据
Fig.8 Illuminance data of three different position's illuminometer
图 9
3.2. 变照度下视觉系统误差预测
由于实验轴的外径尺寸会随着照度的增大而不断减小,以照度最小时测量的轴零件尺寸作为初始值;与后续获得的轴尺寸对比,获得相应的误差. 为了训练遗传算法优化的最小二乘支持向量机、支持向量机(SVM)以及BP神经网络视觉测量系统照度误差模型,将测量的照度数据与视觉测量误差导入MATLAB软件. 随机选取90多组数据作为训练数据,利用剩余数据进行模型验证. 经MATLAB软件拟合,运用遗传算法优化的最小二乘支持向量机、支持向量机模型及BP神经网络模型的误差模型预测结果分别如图10~12所示. 结果表明,利用遗传算法优化的最小二乘支持向量机建立的视觉测量系统照度误差模型的均方差EGA-LSSVM=0.5 μm;支持向量机建立的视觉测量系统误差模型的均方差ESVM=2.3 μm;BP神经网络建立的视觉测量系统误差模型的均方差Ebp=6.49 μm. 综上所述,利用遗传算法优化的最小二乘支持向量机所建立的视觉测量系统照度误差预测模型比支持向量机模型与BP神经网络模型的均方差都小,且该模型的泛化性更好、预测精度更高.
图 10
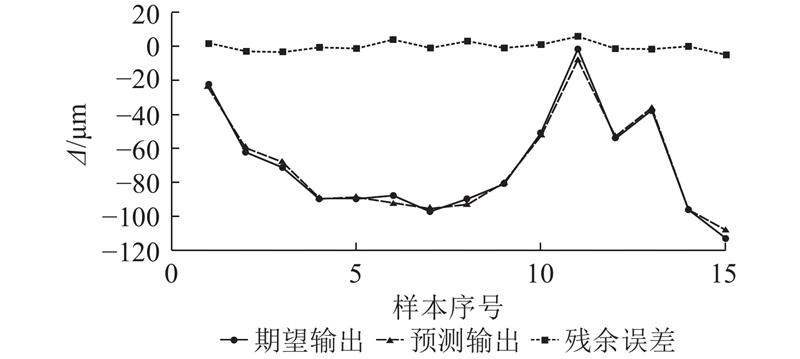
图 10 遗传算法优化的最小二乘支持向量机变照度误差模型预测结果
Fig.10 GA-optimized least square support vector machine variable illuminance error model
图 11
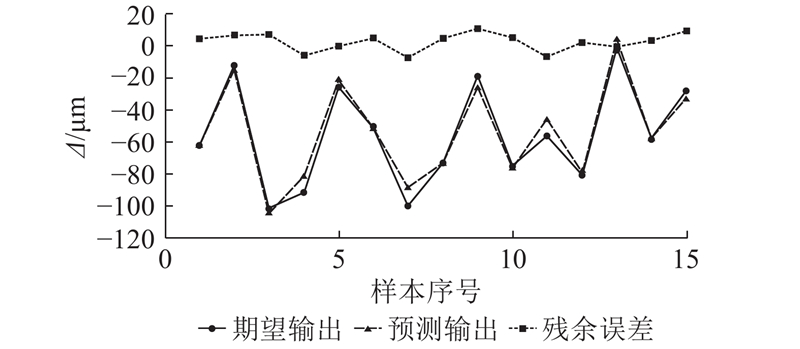
图 11 支持向量机变照度误差模型预测结果
Fig.11 Results of support vector machine variable illuminance error model
图 12
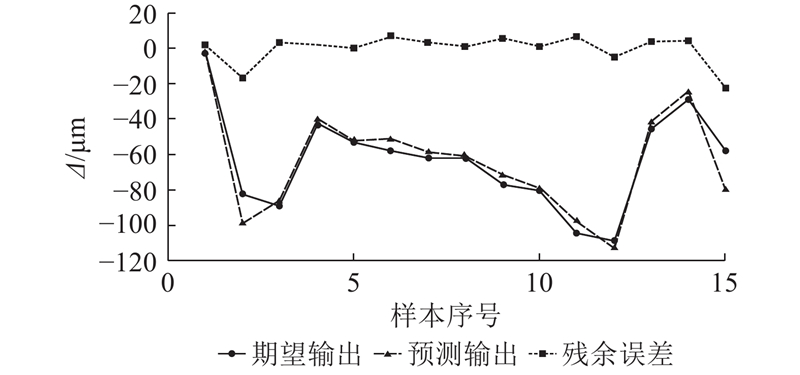
图 12 BP神经网络变照度误差模型预测结果
Fig.12 Prediction results of BP neural network variable illuminance error model
3.3. 变照度下视觉系统误差预测结果评价
视觉测量系统误差预测模型的主要精度指标如表1所示. 表中,
表 1 变照度误差预测模型精度对比
Tab.1
| 模型 | | | | |
| 遗传算法优化的最小二乘支持向量机变照度误差预测模型 | 114.3 | 5.83 | 2.19 | 94.90 |
| 支持向量变照度误差预测模型 | 114.3 | 10.92 | 4.11 | 90.50 |
| BP神经网络变照度误差 预测模型 | 114.3 | 22.14 | 5.67 | 80.60 |
4. 结 论
(1)利用实验法,对影响因素与视觉系统测量误差进行相关性分析,分析结果与实验结果基本相符. 基于小样本误差数据,确定采用支持向量机为基础模型,在此基础上进行改进模型,利用遗传算法最小二乘优化支持向量机模型.
(2)在视觉测量系统误差理论与实验研究的基础上,采用遗传算法优化的最小二乘优化的支持向量机方法,预测变照度下的视觉测量系统误差. 通过Matlab软件训练遗传算法优化的最小二乘支持向量机,建立视觉测量系统照度误差预测模型. 结果表明,视觉测量系统误差模型的最低补偿率从BP神经网络模型的80.60%提高到支持向量机模型的90.23%,再提高到遗传算法优化的最小二乘支持向量机模型的94.90%. 采用遗传算法优化的最小二乘支持向量机建立的照度误差模型在预测精度上有了较大的改善,泛化能力和鲁棒性得到明显提高.
参考文献
Systematic geometric image measurement errors of circular object targets: mathematical formulation and correction
[J].DOI:10.1111/0031-868X.00138 [本文引用: 1]
Improvement of vision measurement accuracy using Zernike moment-based edge location error compensation model
[J].
星点质心亚像元定位的高精度误差补偿法
[J].
High precision error compensation method for sub-pixel positioning of star point centroid
[J].
Prediction of surface roughness in turning operations by computer vision using neural network trained by differential evolution algorithm
[J].DOI:10.1007/s00170-010-2668-5 [本文引用: 1]
摄影测量图像处理的高精度误差补偿法
[J].
High-precision error compensation method for photogrammetric image processing
[J].
Measurement error analysis and accuracy enhancement of 2D vision system for robotic drilling
[J].DOI:10.1016/j.rcim.2013.09.014 [本文引用: 1]
Vision measurement error analysis for nonlinear light refraction at high temperature
[J].DOI:10.1364/AO.57.005556 [本文引用: 1]
Quasi-eccentricity error modeling and compensation in vision metrology
[J].
A novel vision-based pose measurement method considering the refraction of light
[J].DOI:10.3390/s18124348 [本文引用: 1]
A high-efficient measurement system with optimization feature for prototype CMOS image sensors
[J].DOI:10.1109/TIM.2018.2814118 [本文引用: 1]
自适应光强变化的动态边缘位置提取方法
[J].
Dynamic edge position extraction method for adaptive light intensity variation
[J].
Passive location resource scheduling based on an improved genetic algorithm
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}