

作为实现产品回收再制造和维护的关键,拆卸是指采用一定的工具和手段来解除对零部件造成约束的各种联接,实现产品零部件逐个分离的过程[1]. 目前,国内外对产品拆卸的研究主要集中于拆卸序列规划的优化、产品可拆卸性设计和拆卸设备创新设计,对于产品拆卸设备创新设计方法表达模型及创新方案的评价体系缺乏研究. Sung等[2]提出了一种用于再制造系统中的拆卸序列规划启发式方法. Justel等[3]利用TRIZ理论提出了一种可拆卸设计创新方法. Chen等[4]利用TRIZ理论设计了一种用于产品主动拆卸的智能紧固件. 刘志峰等[5]提出了一种产品零部件之间可拆卸联接结构的设计方法. Umeda等[6]提出了功能-行为-状态映射建模扩展方法. 谢清[7]提出了基于知识的定制产品功-构映射方法. 杨得玉等[8]提出了一种基于功-构映射的拆卸设备设计方法.
Petri网在拆卸序列规划领域得到了广泛应用,为拆卸序列生成提供了一种非常有前景的数学方法. Suzuki等[9]最早提出拆卸Petri网(disassembly Petri net,DPN)的概念. Guo等[10]利用拆卸Petri网建模优化了受多种资源约束的选择性拆卸序列. Zhao等[11]提出了一种模糊推理Petri网来确定产品的拆卸序列. Bao等[12]提出了一种使用拆卸优先关系矩阵和DPN来获得近似拆卸序列的系统方法. 刘佳等[13]提出了基于拆卸优先约束关系和着色网的DPN模型. 王攀等[14]对Petri网进行了扩展,引入时间元素解决了燃气涡轮发电机组虚拟拆装问题. 陈卓照[15]应用可拓Petri网建模方法建立了功-构映射模型并创新设计了混合可再生能源烘干设备,验证了Petri网构建映射模型的可行性. 关于Petri网的研究主要针对机械产品的拆卸序列进行过程建模,对于拆卸设备的创新设计过程缺乏研究.
本文提出一种基于Petri网构建功-构映射模型的方法,为实现拆卸设备结构的计算机辅助快速设计提供理论指导. 在功构映射基础上进行扩展,加入需求与行为分析,构造出需求-功能-行为-结构的映射;通过功能表面与TRIZ理论实现拆卸设备的创新设计,并引入模糊数对设计方案进行评价,从而得到最优的拆卸设备设计方案.
1. 概念与结构设计基本单元框架
针对废旧机械产品的拆卸设备,根据分步说明的设计思想,对需求-功能-行为-结构中各部分映射单元的实现过程进行说明.
1)需求→功能映射(记为R→F),其含义为根据概念设计初始阶段的设计需求,得到产品的总功能需求. 拆卸设备的需求分析如图1所示.
图 1
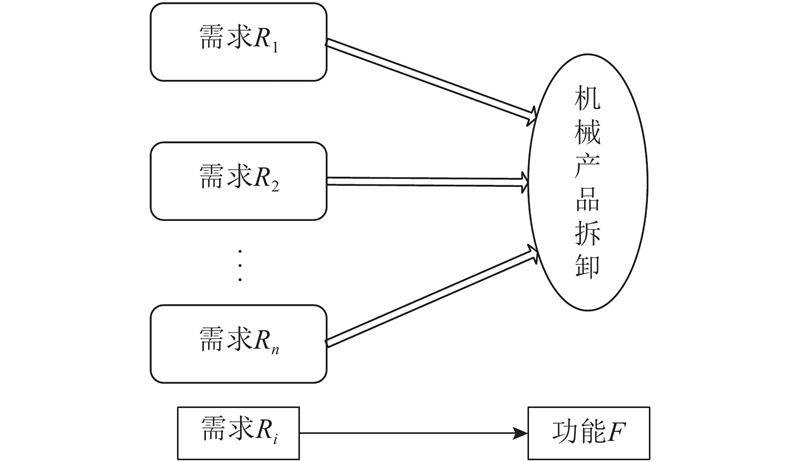
图 1 拆卸设备的需求-功能映射
Fig.1 Requirements to function mapping of dismantling equipment
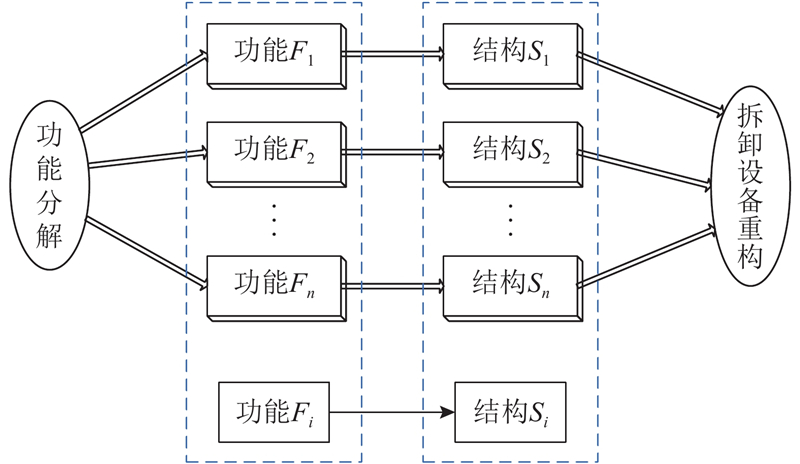
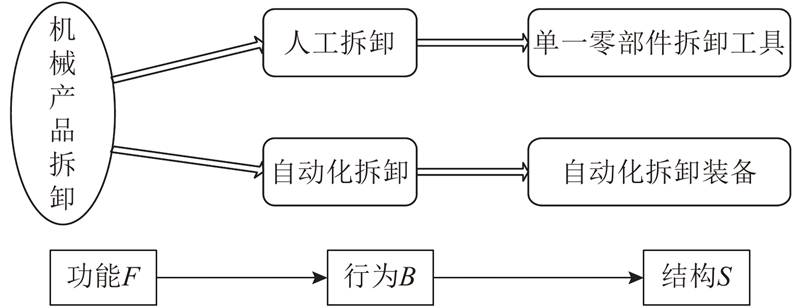
2)功能→结构映射(记为F→S),其含义为根据功能需求直接获得实现功能的结构. 拆卸设备的功能映射如图2所示.
图 2
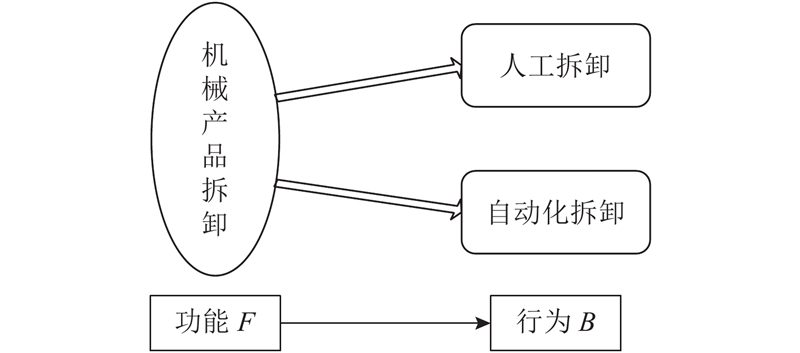
3)功能→行为映射(记为F→B),其含义为对功能进行行为求解,获得实现该功能对应的行为方式. 拆卸设备的行为映射如图3所示.
图 3
4)功能→子功能映射(记为F→SF),其含义为将由设计需求得到的总功能分解为详细的子功能集合. 可以将抽象的总功能具体化,一方面便于概念设计方案的求解,另一方面便于行为求解,驱动结构设计阶段的创新设计. 拆卸设备的功能分解如图4所示.
5)行为→子行为映射(记为B→SB),其含义为对总功能进行分解以得到具体的子功能,相应地,将行为方式对应分解为具体的子行为,实现行为的求解. 拆卸设备的子行为映射如图5所示.
6)行为→结构映射(记为B→S),其含义为根据总功能实现的行为方式,构造实现该行为方式的结构,完成结构设计,形成最终的拆卸设备结构. 拆卸设备的结构分析如图6所示.
图 4
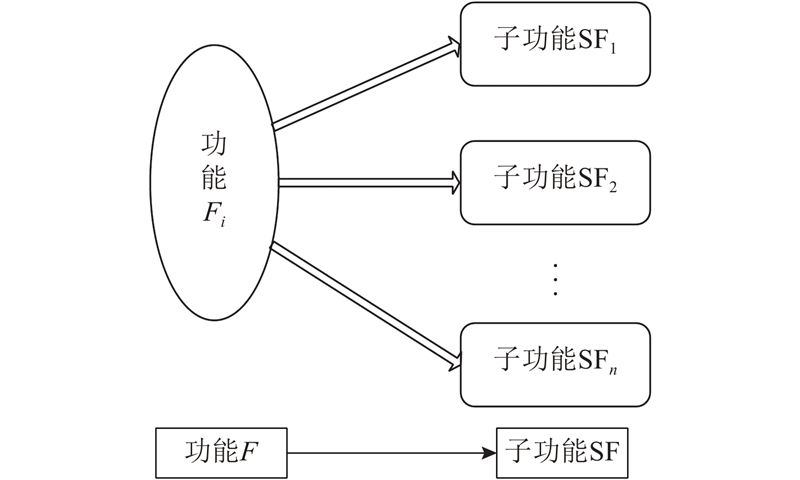
图 4 拆卸设备的功能-子功能映射
Fig.4 Function to sub-functions mapping of dismantling equipment
图 5

图 5 拆卸设备的行为-子行为映射
Fig.5 Behavior to sub-behavior mapping of dismantling equipment
图 6
2. 基于Petri网的功-构映射模型
2.1. Petri网映射原理
Petri网的基本元素包括库所(Place)、变迁(Transition)、弧与标识(Marking). 在Petri网模型中,圆圈“○”表示库所,黑色矩形框“■”表示变迁,有向箭头“→”表示弧. 其中,库所代表机械产品概念设计的各阶段,即需求(requirement)
图 7
将Petri网连接结构看作对需求产品进行设计的完整生产线,构造产品设计各阶段映射过程的标识,来描述各映射阶段产品设计的完成度,即用标识矩阵来描述变迁映射运算;标识矩阵内的字母变量对应于图7中各库所,对其赋值,表示变迁是否激活,激活状态用“1”表示,未激活状态用“0”表示,激活的含义为上述映射运算中变迁矩阵中的数据存在,若均为激活状态,则映射过程实现,反之则无法实现.
根据Petri网的标识这一概念建立面向产品设计各阶段完成度的评价模型,此模型分为概念设计(concept design,CD)阶段和结构设计(structural design,SD)阶段. 其中,用
2.2. Petri网功-构映射规则
Petri网功-构映射中包含的基本元素构成如图7所示的Petri网模型,各元素之间的映射规则由功能映射、行为求解和结构重构这3个方面构成. 规则的实现与否由各阶段的标识来表示.
1)功能映射. 概念设计是由设计需求驱动的,设计需求即为设计目标,是抽象化的描述,不能直接由此映射得到求解结构,因此需要对其进行分解[18]. 总功能作为产品概念设计阶段的总体要求,须进行功能分解,以降低功能求解的复杂度,因此将总功能分解为子功能,在子功能的驱动下对接下来的结构设计阶段进行创新设计. 此过程实现了需求到功能的映射,在Petri网模型中表示为概念设计阶段.
2)行为求解. 在概念设计阶段得到产品设计所要实现的子功能,进而确定相应的实施方案. 但此原理方案仍旧是抽象的,需要进一步对子功能加以描述,即行为表达. 通过行为求解,将子功能映射为子行为,此时子功能转换为对应的功能表面. 表面可以视为实体零件在设计、制造、装配等环节内所表现出来的独立功能载体,功能表面作为机械结构中基本的几何组成单元[19],可以对子行为的实现进行定位,从而确定产品结构设计的具体表面,由概念设计阶段转到结构设计阶段.
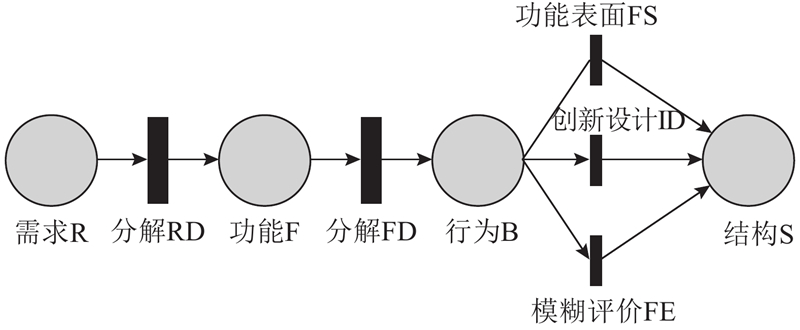
3)结构重构. 根据行为求解得到的子行为,对应于功能映射中功能分解得到的各个功能表面;针对功能表面构造相应的拆卸工具,最终形成完整的拆卸设备,由此可知,功能信息贯穿于Petri网映射的整个过程. 通过概念设计阶段对功能表面进行细化描述,将功能表面的抽象描述转换为实体结构的表达,转换过程需要借助设计方法来实现. 传统方法通过在功能与结构之间增加功能表面这一媒介,形成由功能到功能表面再到结构的映射模式,具体描述为将总功能分解为多个子功能,依据广义定位功能需求选择适合的功能表面予以匹配,得到一系列相互协调的功能表面,实现功能到功能表面的映射. 传统方法并没有考虑重构而成的结构评价问题,无法确定最终选定的结构是否为最符合所需功能的设计. 因此,考虑引入创新设计TRIZ理论及模糊评价体系,依靠创新设计理论(技术矛盾、物-场分析)在相应功能表面处重构出符合功能描述的结构并进行模糊评价,得到最终符合功能表达的结构,从而实现功能到结构的映射,原理如图8所示.
图 8
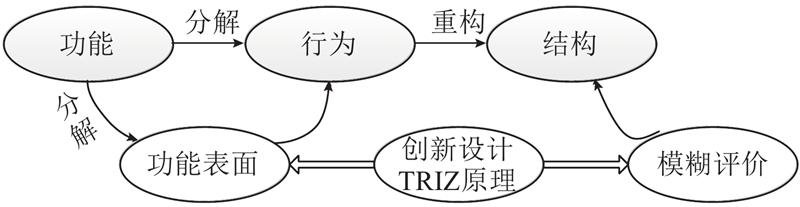
图 8 功能-行为-结构映射原理图
Fig.8 Schematic of function to behavior to structure mapping
图 9
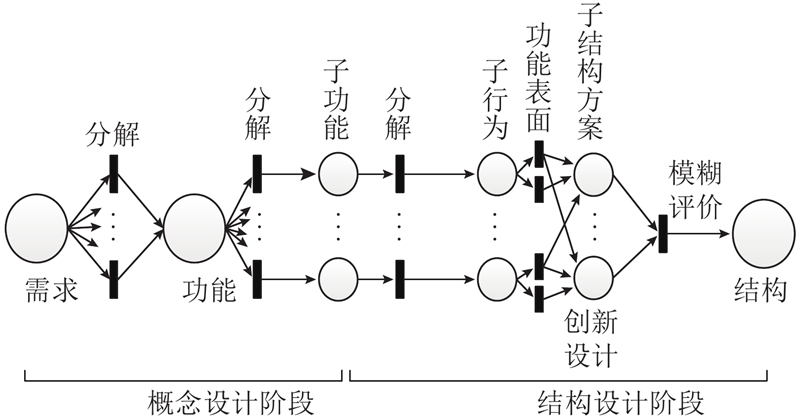
图 9 Petri网功构映射扩展模型
Fig.9 Extended function to structure mapping model of Petri net
2.3. 功-构映射数学模型
根据Petri网映射规则,对图9中的Petri网映射建立数学模型,构造Petri网功-构映射的总表达式:
式中:“☉”代表变迁映射运算符;“→”代表映射过程;根据库所含义不同,i和k代表其集合中的不同元素符号,i表示R、F、B、S,k表示F、B、S;根据变迁含义不同,j代表其集合中的不同元素符号,j表示D、FS、ID、FE.
根据Petri网功-构映射的总表达式,对Petri网映射模型中各映射单元进行矩阵化表达,矩阵内参数含义参考第1章中拆卸设备的各映射单元分析.
1)需求→功能映射(R→F)表示为
2)子功能→子行为映射(SF→SB)表示为
3)子行为→设计方案映射(SB→P)表示为
此映射在变迁过程中分解为两部分:功能表面和创新设计,在确定功能表面的前提下,对相应零部件表面进行创新设计. 因此变迁过程首先应确定功能表面,然后进行创新设计,将式(3)分解后表达为
4)设计方案→结构映射(SP→S).
根据式(4)得到的2种设计方案,引入模糊评价来判断得出最优设计方案,因此该映射表达为
3. 结构设计方案评价
3.1. 评价等级集
表 1 语言变量的含义与取值范围
Tab.1
| 语言变量 | 取值范围 | |
| 含义 | 缩写 | |
| 非常高的一致性 | VH | [0.833,1.000] |
| 高度一致性 | H | [0.667,1.000] |
| 中等高度一致性 | MH | [0.500,0.833] |
| 中等一致性 | M | [0.333,0.667] |
| 较低一致性 | ML | [0.167,0.500] |
| 低一致性 | L | [0,0.333] |
| 非常低的一致性 | VL | [0,0.167] |
图 10
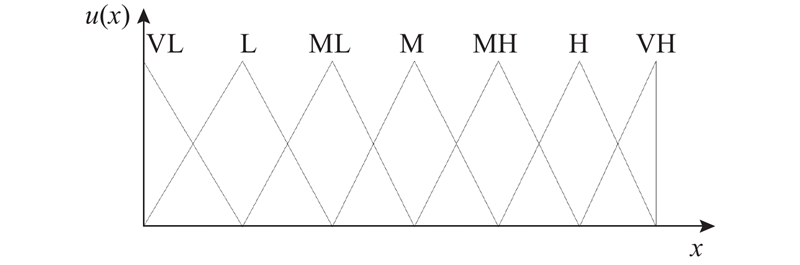
图 10 语言变量的三角隶属度函数图
Fig.10 Triangular membership functions graph of linguistic variables
表 2 不同评价指标对应的维度
Tab.2
| 指标 | 维度 | 指标 | 维度 | |
| C1:新颖性 | c2:独创性 c12:范例相关性 | C3:相关性 | c31:适用性 c32:有效性 | |
| C2:可行性 | c21:可接受性 c22:可实现性 | C4:独特性 | c41:明确性 c42:完整性 c43:清晰性 |
3.2. 权重集合求解
根据层次分析法(analytic hierarchy process,AHP),权重(weights)集合W可表示为
其中,i = 1,2,···,n,0<
建立判断矩阵J[21]表示为
式中:
表 3 不同语言变量对应的相对重要性取值
Tab.3
| 语言变量 | 相对重要性值 | 语言变量 | 相对重要性值 | |
| 同等重要 | 1 | 非常重要 | 7 | |
| 稍微重要 | 3 | 极端重要 | 9 | |
| 明显重要 | 5 | 上述相邻变量的中间值 | 2、4、6、8 |
权重值的计算如下式所示:
式中:i和k分别为判断矩阵的行和列,n为评价指标的个数.
根据第3.1节中各评价指标分解出的不同维度,将评价体系分为2种准则,每种准则有不同的权重值:一级准则权重由式(8)中的
4. 废旧自行车拆卸设备实例
作为短距离交通的主要代步工具,自行车的利用率在各种交通方式中占80%,随着目前更新速度的加快,废旧自行车的回收问题日益突出. 近年来,共享单车进入市场,每年将有至少1000万辆共享单车面临报废,不仅占用公共空间和土地资源,还将至少产生16万吨的城市垃圾,部分结构的材料会危害环境.
4.1. 废旧自行车车把拆卸设备
4.1.1. 车把拆卸需求分析
表 4 2种拆卸方式的需求对比
Tab.4
| 拆卸方式 | 拆卸时间/s | 拆卸成本 |
| 人工拆卸 | 120 | 3000~6000元/月 |
| 拆卸设备 | 100 | 1~10万/套 |
需求域集合表示为
因此,需求映射过程可用第2.3节中的式(1)表达.
4.1.2. 车把拆卸功能映射
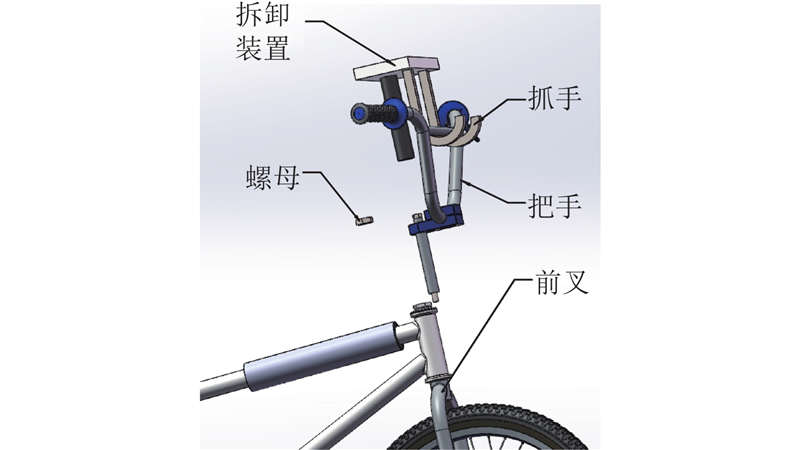
自行车车把的传统拆卸方式分为3步:对前轮进行定位固定(防止提拉车把时车把晃动);旋松车把与前叉联接处的螺母;提拉车把与前叉分离. 根据传统拆卸方法,将总功能分解为3个子功能,即前轮固定功能、螺母旋松功能和车把分离功能,功能域集合表示为
因此,功能映射过程同样用第2.3节中的式(1)表达.
4.1.3. 车把拆卸行为求解
传统拆卸方式主要依靠人工进行拆卸,考虑到人工拆卸效率低、成本高等因素,转换行为方式;采取自动化拆卸的方式;根据第4.1.2节中的功能映射,各子功能对应的行为为固定前轮、自动旋松螺母和自动分离车把,行为域集合表示为
因此,根据功能映射,得到自动化拆卸中各功能对应的拆卸行为.
4.1.4. 车把拆卸设备结构重构
图 11

图 12

图 13

根据行为求解,人工拆卸车把结构的复杂程度与拆卸效率互相影响,利用TRIZ理论提取出通用工程参数“生产率”和“设备的复杂性”这一组矛盾,根据矛盾矩阵得出2种创新原理,即分割原理与多用性原理[22],并根据2种原理得到不同的设计方案. 然后对各功能表面分别进行创新设计,重构出最终的拆卸设备设计结构.
1)分割原理(方案一):为提高一个物体的可分性,将一个物体分成容易组装和拆卸的部分,目的是对车把本身进行可拆卸性设计,提高人工拆卸这一行为方式的效率,对车把本身进行结构重构;此方案与拆卸设备设计需求相违背,无法重构具体的设备结构.
2)多用性原理(方案二):为了使一个物体能够起到多种不同的作用,将求解出的子行为集合为一体,对车把进行自动化拆卸,从而重构出自动化拆卸设备. 此拆卸设备根据功能表面
图 14
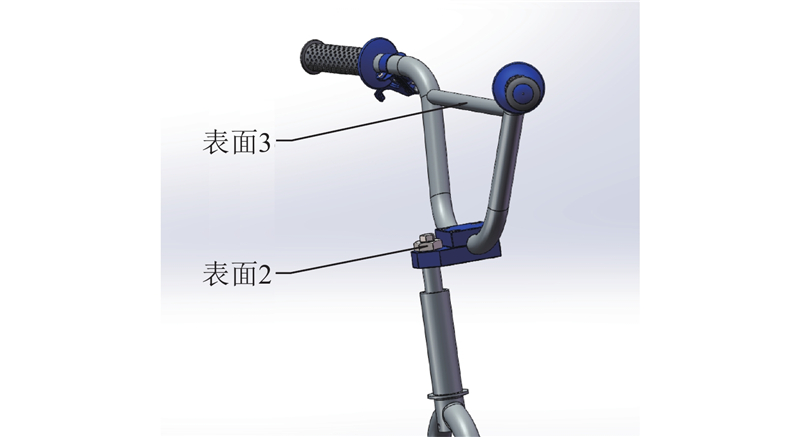
图 15
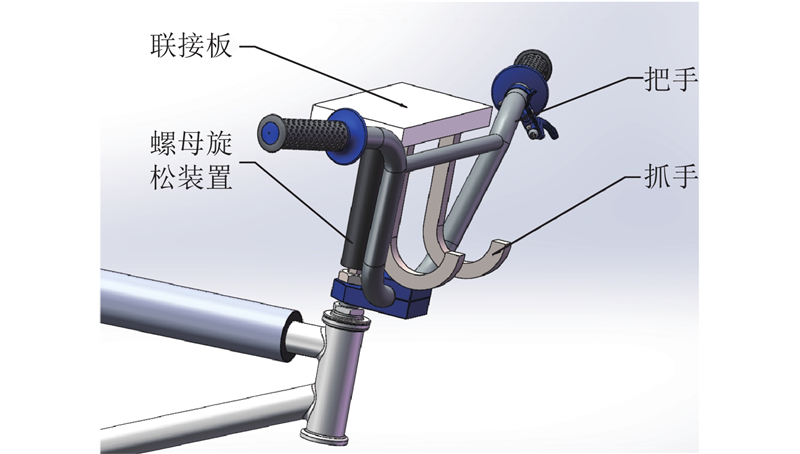
图 16
上述结构映射过程可用第2.3节中的式(3)表示,具体实现过程用式(4)表示.
4.2. 结构设计方案评价
根据第4.1.4节得到的2种拆卸设备设计方案,首先对评价指标进行权重求解.
1)对于一级准则:
因此,一级准则的权重集合为W = {0.081,0.382,0.322,0.215}.
2)对于二级准则,同样按照上述同样的方法进行权重的求解:
表 5 不同指标下的2种方案评价等级
Tab.5
| 指标 | 方案一 | 方案二 |
| 独创性 | L | H |
| 范例相关性 | ML | L |
| 可接受性 | H | MH |
| 可实现性 | H | M |
| 适用性 | L | H |
| 有效性 | L | H |
| 明确性 | L | H |
| 完整性 | MH | H |
引入指标各维度的权重
图 17
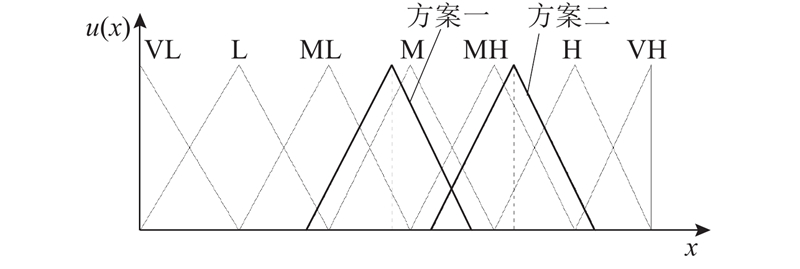
图 17 两种方案的三角隶属度函数对比
Fig.17 Comparison of triangular membership functions of two schemes
5. 结 论
(1)针对废旧产品拆卸装备的设计需求,本研究提出了基于Petri网构建功-构映射的方法.
(2)对功-构映射模型进行扩展,加入需求与行为分析,构造了需求-功能映射的概念设计和功能-行为-结构映射的结构设计,建立了各映射阶段的数学表达式,简化了映射过程的表达.
(3)对需求域、功能域和行为域进行分解,根据得到的功能表面利用TRIZ理论进行创新设计,以废旧自行车车把为例,重构了废旧产品特定零部件的拆卸设备.
(4)运用三角模糊数对创新设计的多种方案进行了对比评价,验证设计方案的创新性,选出了拆卸设备最优设计方案,实现了拆卸设备从需求到功能再到结构的映射.
本文提出的设计方法提供了一种创新模式,指导产品的创新设计,不过仅生成了相应功能表面处的结构特征模型和组装后的设备模型,下一步将根据创新实例库来实现计算机辅助设计的自动化生成.
参考文献
A heuristic for disassembly planning in remanufacturing system
[J].
基于TRIZ的可拆卸连接结构设计研究
[J].
TRIZ based design for disassembly of joint structure
[J].
Development of design methodology for upgradable products based on function-behavior-state modeling
[J].DOI:10.1017/S0890060405050122 [本文引用: 1]
基于功构映射的拆卸设备设计方法
[J].DOI:10.3969/j.issn.1004-132X.2019.11.003 [本文引用: 1]
Dismantling equipment design method based on function to Structure Mapping
[J].DOI:10.3969/j.issn.1004-132X.2019.11.003 [本文引用: 1]
Disassembly sequence optimization for large-scale products with multiresource constraints using scatter search and Petri nets
[J].
Fuzzy reasoning Petri nets and its application to disassembly sequence decision of products
[J].
基于优先关系的飞机机载设备维修拆卸CPN模型
[J].
A disassembly CPN model for maintenance of airborne equipment with disassembly precedence constraints
[J].
基于拆卸 Petri 网和混沌粒子群的拆卸序列规划
[J].DOI:10.3969/j.issn.1001-3997.2015.01.068 [本文引用: 1]
Disassembly sequence planning based on disassembly Petri nets and chaos particle swarm optimization algorithm
[J].DOI:10.3969/j.issn.1001-3997.2015.01.068 [本文引用: 1]
机械产品概念设计多层次混合映射功能求解框架
[J].DOI:10.3321/j.issn:0577-6686.2003.05.016 [本文引用: 1]
Hierarchical function solving framework with hybrid mappings in the conceptual design of mechanical products
[J].DOI:10.3321/j.issn:0577-6686.2003.05.016 [本文引用: 1]
概念设计过程中产品功能的广义定位表达
[J].
Generalized positioning expression of product function in conceptual design process
[J].
An ideation method for generating new product ideas using TRIZ, concept mapping, and fuzzy linguistic evaluation techniques
[J].DOI:10.1016/j.aei.2014.06.006 [本文引用: 2]
创新设计的多级模糊综合评价
[J].DOI:10.3321/j.issn:1002-8331.2005.12.066 [本文引用: 1]
Multilevel fuzzy comprehensive evaluation of innovation design
[J].DOI:10.3321/j.issn:1002-8331.2005.12.066 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}