

随着现代电力电子技术的快速发展,单相脉冲宽度调制(pulse width modulation,PWM)整流器在不间断电源、电力机车牵引、船舶推进、电力系统等领域的应用越来越广泛. 由于受到耐压等级的限制,在高压大容量的场合多电平PWM变流器受到越来越多的关注[1-5]. 传统多电平整流器主要有二极管箝位式拓扑结构、飞跨电容拓扑结构、级联H桥拓扑结构3种类型[3]. 当增加电平时,二极管箝位拓扑要求增加较多箝位二极管,且要考虑电容电压平衡;飞跨电容拓扑则要求增加较多储存电容器,拓扑结构复杂;级联H桥多电平拓扑采用模块化的结构设计,便于系统扩容,但使用器件较多,且需要移相变压器进行电气隔离[3-5]. 为了解决传统拓扑的不足,在开关器件不增加的条件下,可以采用耦合电感来增加输出电平[6]. 基于耦合电感的单相五电平PWM整流器,相比较传统多电平整流器,开关器件个数减少,且不存在电容电压平衡问题[7].
整流器控制的核心目标是直流侧输出电压稳定、交流侧电流总谐波畸变量(total harmonic distortion,THD)低和功率因数高[8-10]. 为了提高系统的动稳态性能,针对PWM整流器的控制策略,相关专家学者进行了大量研究. 其中比例积分(proportional integral,PI)控制、滞环电流控制、瞬态电流控制、比例谐振(proportional resonant,PR)控制、预测电流控制等应用于PWM整流器都取得了一定效果,但也存在一些不足[9]. PI控制实现简单,但动态响应较慢且交流侧电流THD较大;滞环电流控制动态响应较快,但开关频率变化较大,输入电流谐波含量较大;瞬态电流控制能够固定开关频率,但由于电流内环采用PI控制器,存在电流稳态误差,PR控制可以实现电流零稳态误差控制,但在电网电压频率发生偏离时,在实际电网频率处增益会急剧下降,影响控制效果;预测电流控制动态响应较快,但存在开关频率不固定、谐波分布广的缺点.
为了提高PWM整流器控制性能,一些复合和混合控制策略被应用于PWM整流器,取得了不错效果. 在三相PWM整流器控制中采用电压外环滑模、电流内环反馈线性化滑模控制,能够实现三相PWM整流器快速动态响应与稳态特性[11]. 三相PWM整流器采用电压外环滑模、电流内环滞环控制,具有实现简单,且对系统敏感度较低的优点[12]. 在滑模控制中加入6倍频谐振控制能够实现双馈感应发电机在非理想电网下的高性能运行[13]. 比例积分谐振(proportional integral resonant,PIR)控制由PI控制器并联谐振控制器组成,在单相PWM整流器电流内环控制中引入PIR控制器,可以抑制网侧电流低次谐波含量,降低网侧电流THD[14];针对并网逆变器电流控制性能问题,采用PIR控制器对电流内环中电网电压畸变扰动进行抑制与基波电流的跟踪,能够增强光伏并网逆变器系统在复杂电网条件的运行能力,有效降低电流控制内环在电网电压畸变时出现扰动状况的可能性[15]. 在模块化多电平换流器的铁路功率调节器中采用PIR控制策略能够完成跟踪补偿多倍频谐波电流的目标[16].
以基于耦合电感的新型单相五电平PWM整流器为研究对象,为了提升系统动态响应、维持单位功率因数、减少网侧电流THD,将滑模控制和PIR控制相结合,利用两控制器优点实现PWM整流器系统控制目标. 通过对新型单相五电平PWM整流器的电路拓扑和工作原理分析,构建整流器在d-q坐标系下的数学模型,推导整流器的电压外环滑模和电流内环PIR控制算法,给出具体设计过程;对所提滑模PIR控制策略和d-q坐标系传统PI电流控制策略进行基于MATLAB/Simulink仿真和基于RT-lab的半实物实验的对比研究,通过仿真和实验结果验证所提控制策略的合理性与可行性.
1. 新型单相五电平PWM整流器拓扑结构及工作原理
1.1. 新型单相五电平PWM整流器拓扑结构
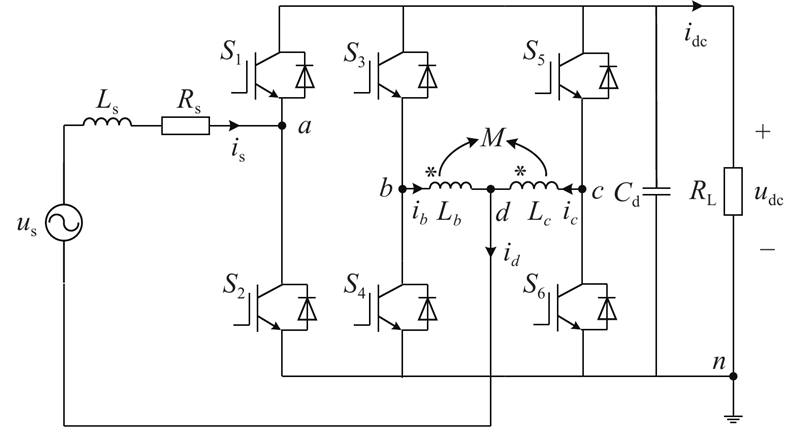
如图1所示为新型单相五电平PWM主电路拓扑. 图中,us、is分别为网侧电压和网侧电流;Ls、Rs分别为网侧等效电感、电阻;id为耦合电感公共端输出电流;udc、idc、Cd、RL分别为直流侧母线电压、负载电流、直流侧支撑电容、等效负载;S1~S6为6个功率开关管;Lb、Lc为2个顺接的耦合电感,耦合电感值为M;ib、ic为流过两耦合电感的电流;n为整流器0电位点;第2、3桥臂的输入端b、c分别接入耦合电感两端,耦合电感的公共端d作为单相PWM整流器的一个输入端,第1个桥臂输出端a作为整流器另一个输入端. 新型单相五电平PWM整流器输入端电压uad将构成五电平.
图 1
1.2. 新型单相五电平PWM整流器工作原理
新型单相五电平PWM整流器在第2、3桥臂输入端接入的电感为
式中:
根据新型单相五电平PWM整流器拓扑结构可知
式中:ubn、ucn分别为耦合电感Lb、Lc两端电压,udn为耦合电感的公共端d与0电位点之间的电压.
将式(2)前2个方程相加,并将第3个方程代入,得到
漏感较小一般可以忽略,则有
式中:uan为第一桥臂输入端a与0电位之间的电压.
新型单相五电平PWM整流器每个桥臂上、下2个开关器件均为互补工作方式,即每个桥臂只有2种开关状态. 定义每个桥臂的开关管的通断为
式中:
根据式(5)、(6),定义电路开关状态函数为
根据式(4)~(7)可以得到新型单相五电平PWM整流器开关状态,如表1所示. 表中,ubd、ucd分别为耦合电感Lb、Lc两端的电压,ubc为第2桥臂中点b和第3桥臂中点c之间的电压.
表 1 新型单相五电平PWM整流器开关状态
Tab.1
| T1 | T2 | T3 | uan | ubn | ucn | udn | ubd | ucd | ubc | uad |
| 1 | 0 | 0 | udc | 0 | 0 | 0 | 0 | 0 | 0 | udc |
| 1 | 0 | 1 | udc | 0 | udc | udc /2 | −udc /2 | udc /2 | −udc | udc /2 |
| 1 | 1 | 0 | udc | udc | 0 | udc /2 | udc /2 | −udc /2 | udc | udc /2 |
| 1 | 1 | 1 | udc | udc | udc | udc | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | udc | udc /2 | −udc /2 | udc /2 | −udc | −udc /2 |
| 0 | 1 | 0 | 0 | udc | 0 | udc /2 | udc /2 | −udc /2 | udc | −udc /2 |
| 0 | 1 | 1 | 0 | udc | udc | udc | 0 | 0 | 0 | −udc |
2. 新型单相五电平PWM整流器滑模PIR控制算法
PWM整流器控制算法和电路结构、控制目标相关[10],针对新型单相五电平PWM整流器提出采用滑模PIR控制算法来实现控制目标.
2.1. 新型单相五电平PWM整流器数学模型
由如图1所示的主电路拓扑,借助电路开关函数Si根据基尔霍夫电压定律和基尔霍夫电流定律可以得到
这里的单相系统仅有1个自由度,无法直接进行坐标变换,采用采样延时90°法构造一个与实际网侧电压、电流正交的虚拟量. 在稳态情况下网侧电压、电流在静止坐标系下可以表示为
式中:Um、Im分别为网侧电压、电流峰值,uα、uβ、iα、iβ分别网侧电压、电流在静止坐标系下的分量,ω为网侧电压角频率,φ为网侧电流滞后电压相位角.
由两相静止坐标系到两相旋转坐标的变换为
式中:θ为旋转坐标轴d轴和静止坐标轴α轴的夹角,θ=wt.
由式(8)~(11)可以推得新型单相五电平PWM整流器在d-q同步旋转坐标系下的数学模型为
式中:usd、usq分别为网侧电压d、q轴分量;ud、uq、id、iq分别为整流器输入端电压、电流的d、q轴分量,Sd、Sq分别为系统开关函数转换到d-q坐标系下的变量.
2.2. 电压外环滑模控制算法
滑模控制是不连续非线性的控制策略,具有一定的开关特性,这种开关特性不受外部扰动和内部参数变化的影响,能够使系统一直沿着滑模面运动,因此这种控制算法具有较强适应性和鲁棒性. 系统切换面s(x)=s(x1,x2,···,xn)=0,满足滑动模态要求:
为了实现滑模控制,根据系统动态特性建立合适的滑模切换函数
PWM整流器控制目标主要有实现系统网侧单位功率因数运行和直流侧输出电压稳定. 在根据控制目标要求系统稳态时,有
式中:
选择udc、iq为输出变量,设
选取滑模面:
式中:β为滑模控制反馈系数,根据滑模控制理论,系统响应速度与β取值有关.
由式(12)、(15)、(16)可以得到
当系统稳定时,在d-q坐标系下,iq=0、usq=0、
将式(18)代入式(17),可以得到
当系统稳态时,有
2.3. 电流内环PIR控制算法
2.3.1. d-q坐标系传统PI电流控制算法
在d-q坐标系下,单相PWM整流器一般采用PI前馈算法[17],控制方程为
式中:
当新型单相五电平PWM整流器采用d-q坐标系传统PI电流控制算法时,整流器直流侧电压脉动会引起整流器给定网侧电流中产生大量谐波,最终整流器实际网侧电流中含有3、5、7次等奇次谐波,造成电网污染.
当考虑网侧电流中含有奇次谐波时,由式(10)可以得到
式中:k为大于0的正整数,n为谐波次数,I1、In和φ1、φn分别为基波和n次谐波电流的幅值和相位.
将式(22)转换到d-q坐标系,由式(11)可以得到
由式(23)可知,当网侧电流中含有谐波时,将网侧电流转换到d-q旋转坐标系后,网侧电流的基波转换为直流,含有的4k+1次谐波和4k−1次谐波均变换为4k次波动. 由于PI控制器无法准确对谐波电流进行跟踪,d-q坐标系传统PI电流控制算法则不能够消除网侧电流中谐波.
2.3.2. d-q坐标系PIR控制算法
为了减少网侧电流THD,在内环的PI控制器上并联谐振控制器,构成PIR控制器.
理想谐振控制器传递函数为
式中:kr为谐振系数;ω0为谐振频率,一般取工频角频率(100π)的整数倍.
为了减少电网波动对输出增益的影响,使用改进型的准谐振控制器,传递函数为
式中:
如图2所示为kr=1、ω0=200π、ωc=5时谐振控制器和准谐振控制器的Bode图. 图中,ω、ϕ、L分别为频率、相位、幅值. 可以看出,准谐振控制器在谐振频率处增益较低,带宽较大,能够降低系统敏感性,提升系统稳定性.
图 2
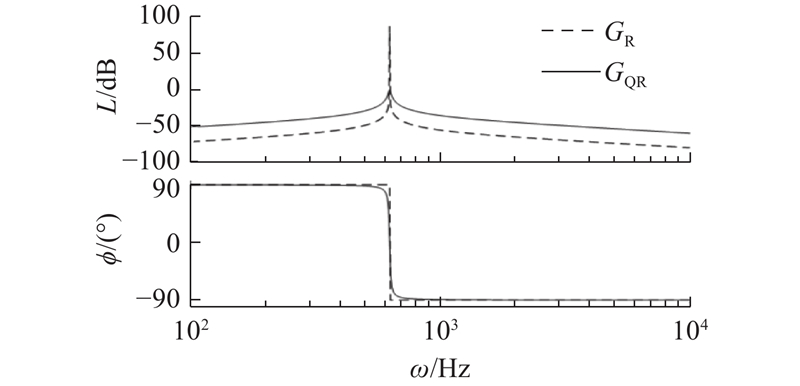
图 2 谐振控制器和准谐振控制器Bode图
Fig.2 Bode diagram of resonant controller and quasi-resonant controller
使用准谐振控制器构成PIR控制器,传递函数为
为了尽可能多的降低网侧电流THD,在内环控制中使用多个准谐振控制器并联,构成多PIR控制器,其控制框图如图3所示.
图 3
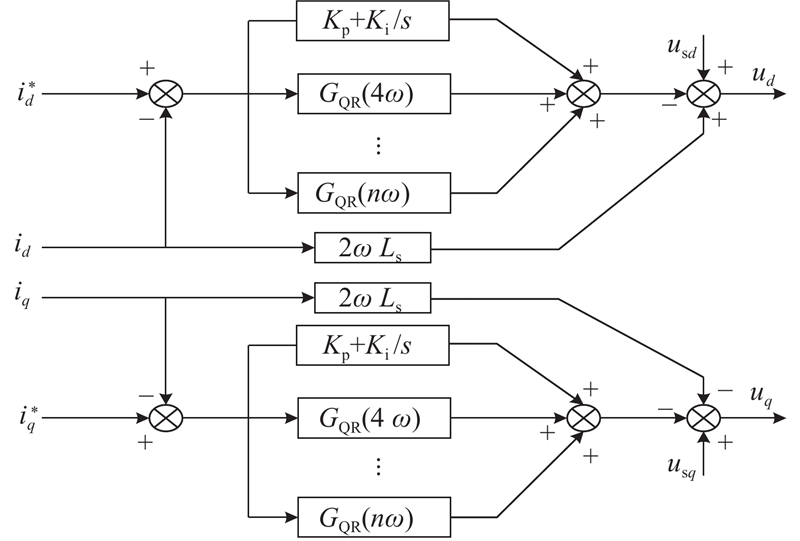
在d-q坐标系下将PI控制变为PIR控制,由式(21)、(26)可以得到其控制方程为
2.4. 新型单相五电平PWM整流器滑模PIR控制系统结构框图
新型单相五电平PWM整流器采用电压电流双闭环控制,电压外环采用鲁棒性较强的滑模控制,提升整流器系统动态响应,外环滑模控制的输出
图 4
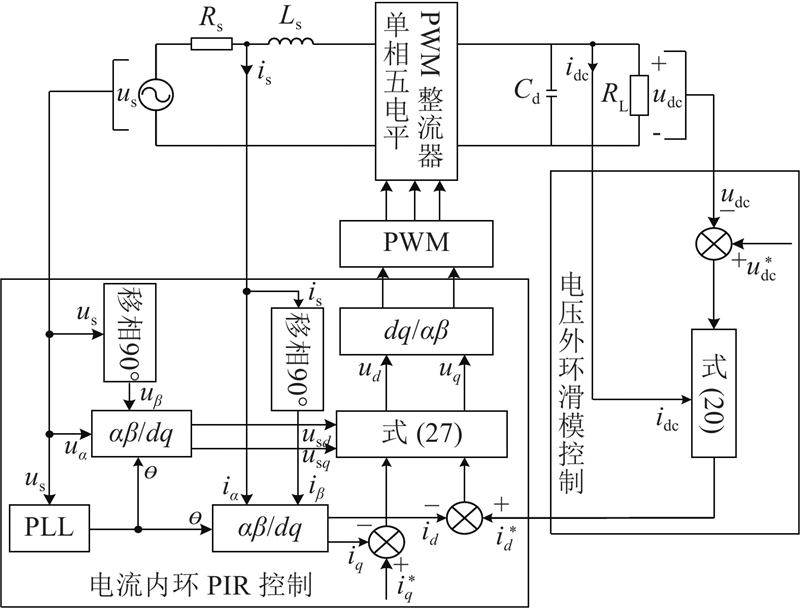
图 4 新型五电平PWM整流器的滑模PIR控制系统框图
Fig.4 Block diagram of sliding mode PIR control system of new five-level PWM rectifier
3. 仿真分析
以新型单相五电平PWM整流器为研究对象,在MATLAB/Simulink环境下搭建仿真模型,对d-q坐标系传统PI电流控制和所提滑模PIR控制算法进行仿真对比分析. 其中滑模PIR控制算法中并联谐振控制器为2个,电压外环滑模系数
表 2 单相五电平整流器系统仿真参数
Tab.2
| 参数/单位 | 参数值 |
| 网侧电压us/V | 310 |
| 等效输入电感Ls/mH | 3.5 |
| 等效电阻Rs/Ω | 0.05 |
| 耦合电感Lb/mH | 3 |
| 耦合电感Lc/mH | 3 |
| 开关频率fs/Hz | 3000 |
| 直流侧支撑电容Cd/F | 4.5 |
| 直流侧负载RL/Ω | 40 |
| 直流侧电压给定值u*dc/V | 400 |
图 5
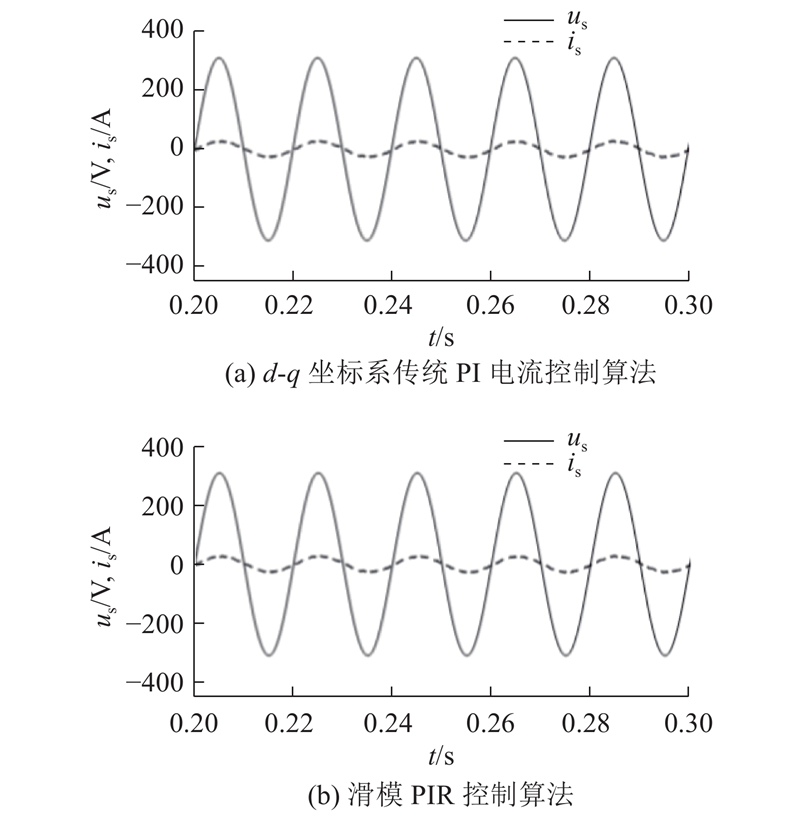
图 5 稳态情况下网侧电压与电流仿真波形
Fig.5 Simulation waveforms of line voltage and line current in steady state
如图6所示为d-q坐标系传统电流PI控制和所提滑模PIR控制的新型单相五电平PWM整流器网侧电流的快速傅里叶变换(fast Fourier transform,FFT)图. 图中,Mag为各次谐波占基波的相对幅度. 由图6(a)可以看出,网侧电流谐波主要包括低次谐波和开关频率附近的高次谐波,其中低次谐波含量较大. 由图6(b)可以看出,采用滑模PIR控制算法的新型单相五电平PWM整流器的网侧电流
图 6
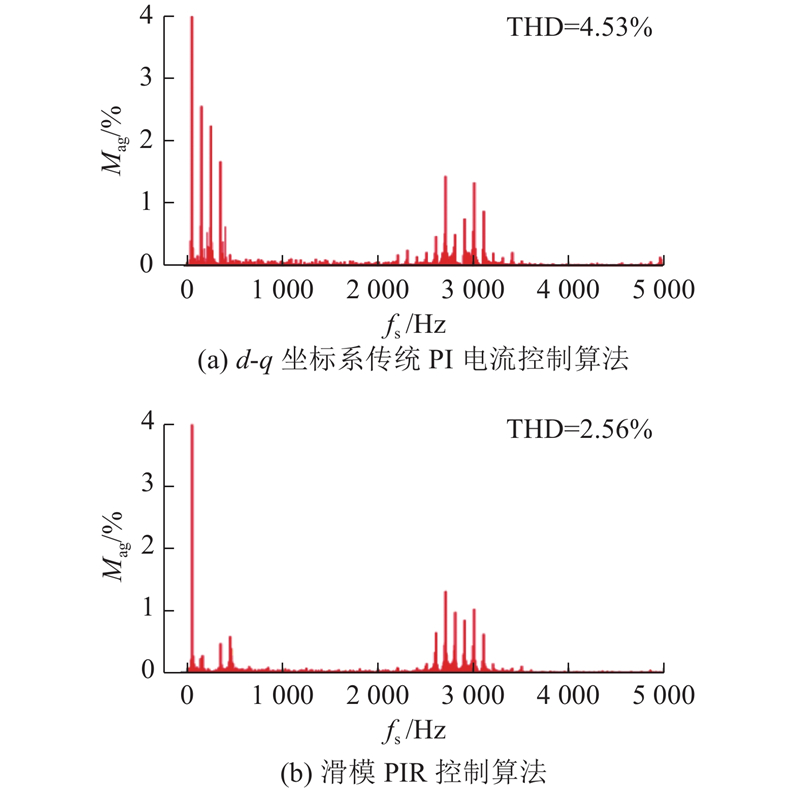
图 6 稳态运行时网侧电流FFT分析结果
Fig.6 FFT analysis result of line current in steady state
图 7
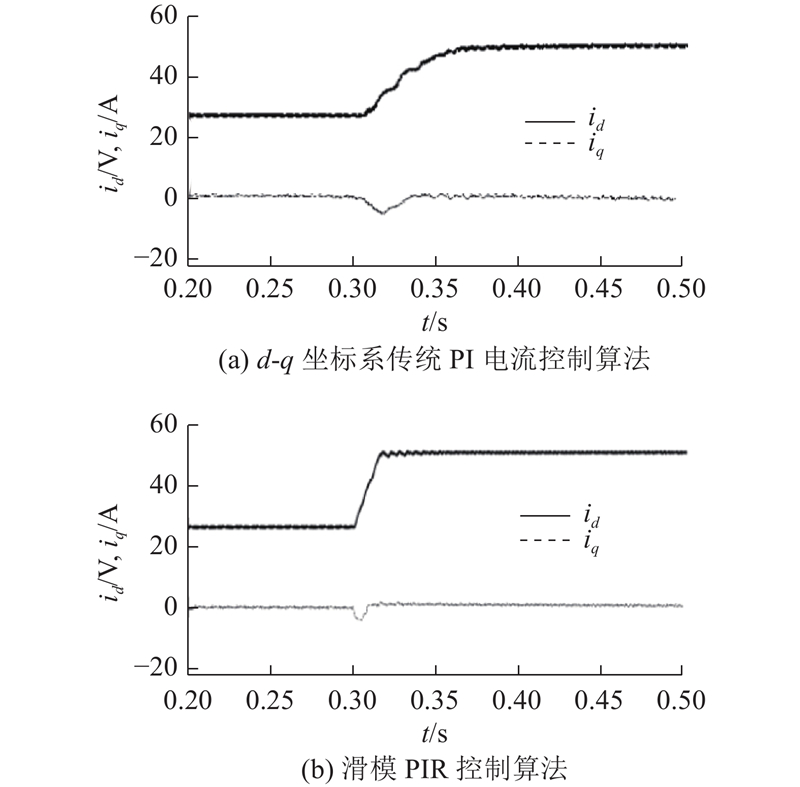
图 7 负载突变时的网侧电流d-q轴分量波形
Fig.7 Simulation waveforms ofd-axis andq-axis currents in sudden load change condition
图 8
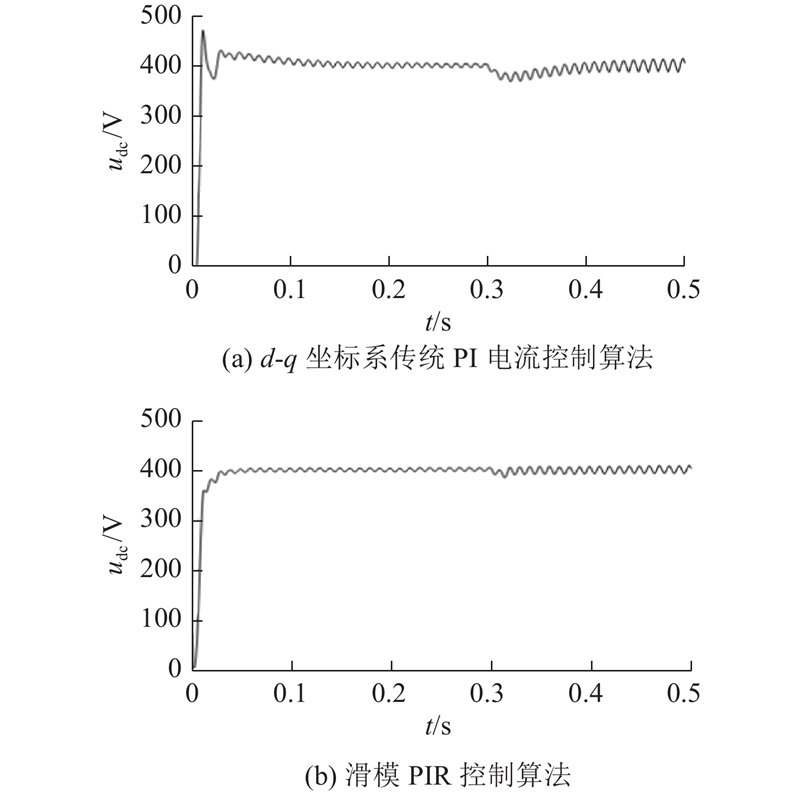
图 8 新型单相五电平整流器系统启动和负载突变时输出直流电压仿真波形
Fig.8 Simulation waveforms of output DC voltage under condition of startup and sudden load change of new single-phase five-level rectifier system
4. 实验验证
图 9

图 9 新型单相五电平PWM整流器半实物实验系统
Fig.9 Semi-physical experiment system of new single-phase five-level PWM rectifier
图 10
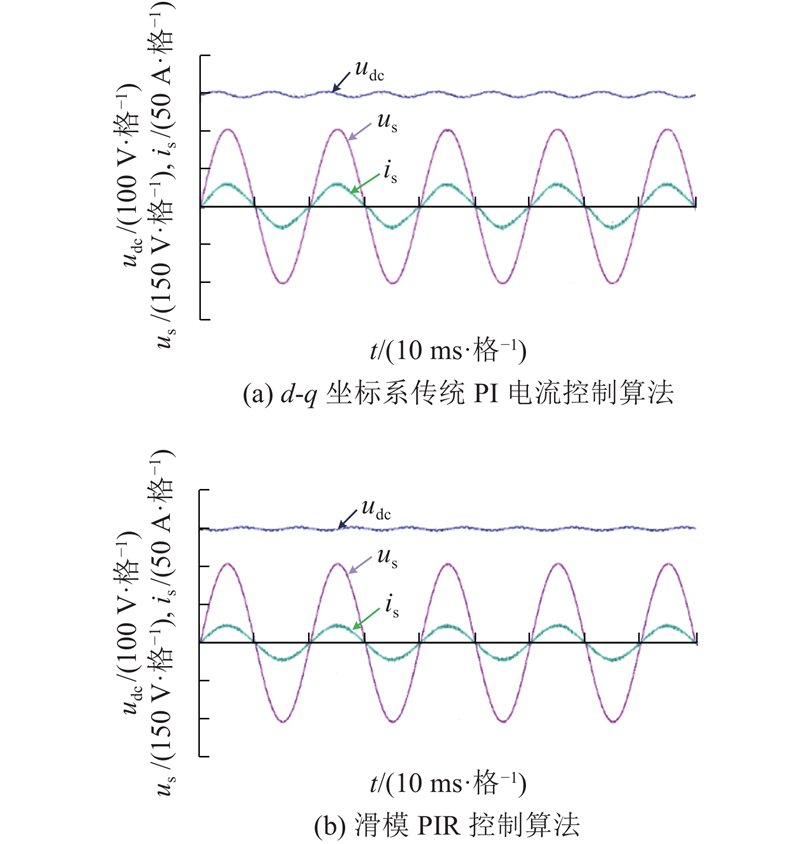
图 10 稳态运行网侧电压电流实验波形
Fig.10 Experimental waveforms of main voltage and line current in steady state
图 11
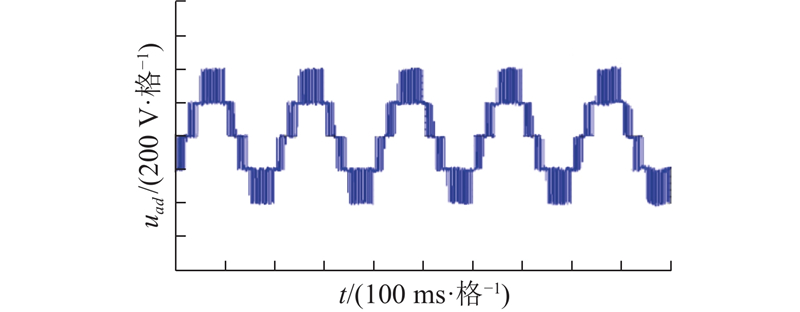
图 11 稳态运行时输入端电压实验波形
Fig.11 Experimental waveforms of input voltage in steady state
图 12
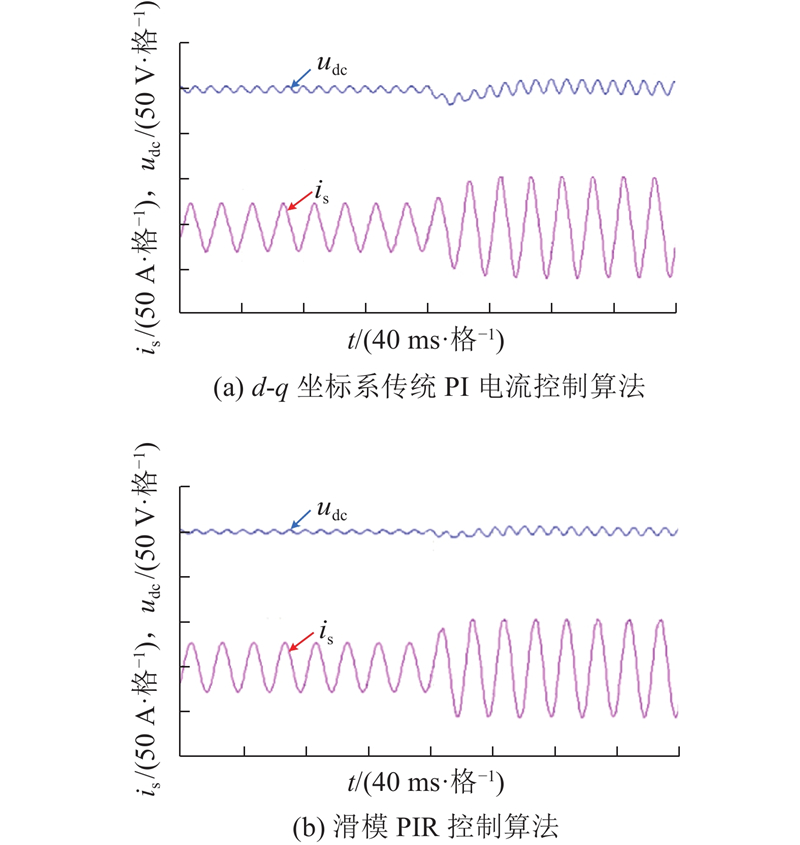
图 12 负载突变时直流侧电压和网侧电流实验波形
Fig.12 Experimental waveforms of DC-link voltage and line current in sudden load change condition
5. 结 语
以基于耦合电感的新型单相五电平PWM整流器为研究对象,为了提升整流器系统的控制性能,提出滑模PIR控制算法. 通过计算机仿真和实验与d-q坐标系传统PI电流控制算法进行对比研究. 仿真和实验结果表明,在所提滑模PIR控制算法下,新型单相五电平PWM整流器网侧电流THD更低,动态响应更快,在系统启动和负载突变时具有更好的动态性能,验证了本研究所提控制策略的可行性和正确性. 研究成果也为其他多电平PWM整流器的控制算法提供了参考.
参考文献
模块组合多电平变换器的研究综述
[J].
A review of modular multilevel converters
[J].
模块化多电平换流器改进最近电平调制策略
[J].
Improved nearest level modulation strategy for modular multilevel converters
[J].
基于新型模块化多电平变换器的五电平PWM整流器
[J].
A five-level PWM rectifier based on new modular multilevel converter
[J].
一种单相四象限五电平变换器
[J].
Single-phase four-quadrant five-level converter
[J].
Recent advances and industrial applications of multilevel converters
[J].DOI:10.1109/TIE.2010.2049719 [本文引用: 2]
单相PWM整流器改进无差拍电流预测控制方法
[J].
The improved deadbeat predictive current control method for single-phase PWM rectifiers
[J].
单相PWM整流器模型预测电流控制算法
[J].
A model predictive current control scheme for single-phase PWM rectifiers
[J].
新型三电平单向混合整流器电流控制策略分析
[J].DOI:10.3969/j.issn.1003-8930.2018.12.006 [本文引用: 2]
Analysis of current control strategy for novel three-level unidirectional hybrid rectifier
[J].DOI:10.3969/j.issn.1003-8930.2018.12.006 [本文引用: 2]
基于多滑模变结构控制的三相PWM整流器非线性控制
[J].DOI:10.3969/j.issn.1000-6753.2016.04.012 [本文引用: 1]
Nonlinear control of three-phase PWM rectifier based on multi-sliding mode variable structure control
[J].DOI:10.3969/j.issn.1000-6753.2016.04.012 [本文引用: 1]
基于滑模控制的PWM整流器建模与仿真
[J].
Modeling and simulation of PWM rectifier based on sliding-mode control
[J].
非理想电网下双馈感应发电机谐振滑模控制
[J].
Resonant-based sliding mode control of doubly-fed induction generator connected to unideal grid
[J].
具有低次谐波抑制能力的PIR控制器设计
[J].
Design of PIR controller with the ability of low harmonic damping
[J].
基于比例积分谐振调节的光伏并网逆变器电流控制方法
[J].
Current control strategy for photovoltaic grid-connected inverter based on PIR regulator
[J].
采用MMC-RPC治理牵引供电系统负序和谐波的PIR控制策略
[J].
PIR control strategy on compensation of negative sequence and harmonic for railway power supply system using MMC-RPC
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}