[1]
BOWYER S A, BAENA F R Dissipative control for physical human-robot interaction
[J]. IEEE Transactions on Robotics , 2015 , 31 (6 ): 1281 - 1293
DOI:10.1109/TRO.2015.2477956
[本文引用: 1]
[2]
KIM Y M, KOO S Y, LIM J G, et al A robust online touch pattern recognition for dynamic human-robot interaction
[J]. IEEE Transactions on Consumer Electronics , 2010 , 56 (3 ): 1979 - 1987
DOI:10.1109/TCE.2010.5606355
[3]
STIEFELHAGEN R, EKENEL H K, FUGEN C, et al Enabling multimodal human–robot interaction for the karlsruhe humanoid robot
[J]. IEEE Transactions on Robotics , 2007 , 23 (5 ): 840 - 851
DOI:10.1109/TRO.2007.907484
[4]
YU H, HUANG S, CHEN G, et al Human–robot interaction control of rehabilitation robots with series elastic actuators
[J]. IEEE Transactions on Robotics , 2015 , 31 (5 ): 1089 - 1100
DOI:10.1109/TRO.2015.2457314
[5]
ZHANG J, CHEAH C C Passivity and stability of human–robot interaction control for upper-limb rehabilitation robots
[J]. IEEE Transactions on Robotics , 2015 , 31 (2 ): 233 - 245
DOI:10.1109/TRO.2015.2392451
[6]
孙月, 刘景泰 基于RGB-D传感器的室内服务机器人舒适跟随方法
[J]. 机器人 , 2019 , 41 (6 ): 823 - 833
[本文引用: 1]
SUN Yue, LIU Jing-tai RGB-D sensor based human comfortable following behavior for service robots in indoor environments
[J]. Robot , 2019 , 41 (6 ): 823 - 833
[本文引用: 1]
[7]
BERGELES C, YANG G Z From passive tool holders to microsurgeons: safer, smaller, smarter surgical robots
[J]. Transactions on Biomedical Engineering , 2013 , 61 (5 ): 1565 - 1576
[本文引用: 1]
[8]
DU G, CHEN M, LIU C, et al Online robot teaching with natural human–robot interaction
[J]. IEEE Transactions on Industrial Electronics , 2018 , 65 (12 ): 9571 - 9581
DOI:10.1109/TIE.2018.2823667
[9]
SADRFARIDPOUR B, WANG Y Collaborative assembly in hybrid manufacturing cells: an integrated framework for human–robot interaction
[J]. IEEE Transactions on Automation Science Engineering , 2017 , 15 (3 ): 1178 - 1192
[10]
SHENG W, THOBBI A, GU Y An integrated framework for human–robot collaborative manipulation
[J]. IEEE Transactions on Cybernetics , 2014 , 45 (10 ): 2030 - 2041
[11]
STILLI A, DIMITRAKAKIS E, D'ETTORRE C, et al Pneumatically attachable flexible rails for track-guided ultrasound scanning in robotic-assisted partial nephrectomy: a preliminary design study
[J]. IEEE Robotics and Automation Letters , 2019 , 4 (2 ): 1208 - 1215
DOI:10.1109/LRA.2019.2894499
[本文引用: 1]
[12]
侯澈, 王争, 赵忆文, 等 面向直接示教的机器人负载自适应零力控制
[J]. 机器人 , 2017 , 39 (4 ): 439 - 448
[本文引用: 3]
HOU Che, WANG Zheng, ZHAO Yi-wen, et al Load adaptive force-free control for the direct teaching of robots
[J]. Robot , 2017 , 39 (4 ): 439 - 448
[本文引用: 3]
[14]
张铁, 洪景东, 刘晓刚 基于弹性摩擦模型的机器人免力矩传感器拖动示教方法
[J]. 农业机械学报 , 2019 , 50 (1 ): 419 - 427
[本文引用: 1]
ZHANG Tie, HONG Jing-dong, LIU Xiao-gang Dragging teaching method without torque sensor for robot based on elastic friction model
[J]. Transactions of the Chinese Society of Agricultural Machinery , 2019 , 50 (1 ): 419 - 427
[本文引用: 1]
[15]
YUAN J, WANG S, WAN W, et al Direct teaching of industrial manipulators using current sensors
[J]. Assembly Automation , 2018 , 38 (2 ): 216 - 225
DOI:10.1108/AA-02-2017-027
[本文引用: 2]
[16]
PARK C, KYUNG J H, DO H M, et al. Development of direct teaching robot system [C] // 2011 8th International Conference on Ubiquitous Robots and Ambient Intelligence . Incheon: IEEE, 2011: 730-732.
[本文引用: 1]
[17]
PARK D I, PARK C, KYUNG J H. Design and analysis of direct teaching robot for human-robot cooperation [C] // 2009 IEEE International Symposium on Assembly and Manufacturing . Suwon: IEEE, 2009: 220-224.
[18]
PARK D I, PARK C, KYUNG J H. Signal processing of direct teaching data for human-robot cooperation [C] // 2010 IEEE International Symposium on Industrial Electronics . Bari: IEEE, 2010: 1956-1960.
[19]
胡建元, 黄心汉, 陈锦江 Movemaster-EX机器人零力跟踪控制
[J]. 华中理工大学学报 , 1993 , 21 (6 ): 135 - 139
[本文引用: 1]
HU Jian-yuan, HUANG Xin-han, CHEN Jin-jiang Zero-force control for a type movemaster-EX robot
[J]. Journal of Huazhong University of Science and Technology , 1993 , 21 (6 ): 135 - 139
[本文引用: 1]
[20]
TJAHJOWIDODO T, AL-BENDER F, VAN BRUSSEL H Theoretical modelling and experimental identification of nonlinear torsional behaviour in harmonic drives
[J]. Mechatronics , 2013 , 23 (5 ): 497 - 504
DOI:10.1016/j.mechatronics.2013.04.002
[本文引用: 1]
[21]
TUTTLE T D, SEERING W P A nonlinear model of a harmonic drive gear transmission
[J]. IEEE Transactions on Robotics and Automation , 1996 , 12 (3 ): 368 - 374
DOI:10.1109/70.499819
[本文引用: 1]
[22]
RUDERMAN M, IWASAKI M Sensorless torsion control of elastic-joint robots with hysteresis and friction
[J]. IEEE Transactions on Industrial Electronics , 2015 , 63 (3 ): 1889 - 1899
[本文引用: 2]
[23]
BITTENCOURT A C, GUNNARSSON S Static friction in a robot joint: modeling and identification of load and temperature effects
[J]. Journal of Dynamic Systems, Measurement and Control , 2012 , 134 (5 ): 1581 - 1589
[本文引用: 2]
[24]
KENNEDY C W, DESAI J P Modeling and control of the Mitsubishi PA-10 robot arm harmonic drive system
[J]. IEEE/ASME Transactions on Mechatronics , 2005 , 10 (3 ): 263 - 274
DOI:10.1109/TMECH.2005.848290
[本文引用: 1]
[25]
JOHANASTROM K, CANUDAS C Revisiting the LuGre friction model
[J]. IEEE Control Systems , 2009 , 28 (6 ): 101 - 114
[本文引用: 1]
[26]
ZHANG Q, LIU G Precise control of elastic joint robot using an interconnection and damping assignment passivity-based approach
[J]. IEEE/ASME Transactions on Mechatronics , 2016 , 21 (6 ): 2728 - 2736
DOI:10.1109/TMECH.2016.2578287
[本文引用: 1]
[27]
WU Z Adaptive block compensation trajectory tracking control based on LuGre friction model
[J]. International Journal of Advanced Robotic Systems , 2019 , 16 (5 ): 1 - 10
[28]
李智靖, 叶锦华, 吴海彬 基于卷积力矩观测器与摩擦补偿的机器人碰撞检测
[J]. 浙江大学学报: 工学版 , 2019 , 53 (3 ): 427 - 434
[本文引用: 1]
LI Zhi-jing, YE Jin-hua, WU Hai-bin Robot collision detection with convolution torque observer and friction compensation
[J]. Journal of ZheJiang University: Engineering Science , 2019 , 53 (3 ): 427 - 434
[本文引用: 1]
[29]
OLSSON H. Control systems with friction [D]. Sweden: Lund Institute of Technology, 1996.
[本文引用: 1]
[31]
李智靖, 叶锦华, 吴海彬 机器人带未知负载条件下的碰撞检测算法
[J]. 机器人 , 2020 , 42 (1 ): 29 - 38
LI Zhi-jing, YE Jin-hua, WU Hai-bin Collision detection algorithm for robots with unknown payload
[J]. Robot , 2020 , 42 (1 ): 29 - 38
[32]
钟琮玮, 项基, 韦巍, 等 基于扰动观测器的机械手碰撞检测与安全响应
[J]. 浙江大学学报: 工学版 , 2012 , 46 (6 ): 1115 - 1121
[本文引用: 1]
ZHONG Cong-wei, XIANG Ji, WEI Wei, et al Collision detection and safe reaction of manipulator based on disturbance observer
[J]. Journal of Zhejiang University: Engineering Science , 2012 , 46 (6 ): 1115 - 1121
[本文引用: 1]
[33]
DE LUCA A, MATTONE R. Actuator failure detection and isolation using generalized momenta [C] // 2003 IEEE International Conference on Robotics and Automation . Taipei: IEEE, 2003: 634-639.
[本文引用: 1]
[34]
PERSIS C D, ISIDORI A A geometric approach to nonlinear fault detection and isolation
[J]. Transactions on Automatic Control , 2001 , 46 (6 ): 853 - 865
[本文引用: 1]
[35]
ZHANG H, AHMAD S, LIU G Torque estimation for robotic joint with harmonic drive transmission based on position measurements
[J]. IEEE Transactions on Robotics , 2015 , 31 (2 ): 322 - 330
DOI:10.1109/TRO.2015.2402511
[本文引用: 1]
[36]
LEE W, LEE C Y, JEONG Y H, et al Distributed component friction model for precision control of a feed drive system
[J]. IEEE/ASME Transactions on Mechatronics , 2015 , 20 (4 ): 1966 - 1974
DOI:10.1109/TMECH.2014.2365958
[本文引用: 1]
[37]
廖洪波, 范世珣, 黑墨, 等 光电稳定平台伺服系统动力学建模与参数辨识
[J]. 光学精密工程 , 2015 , 23 (2 ): 477 - 484
DOI:10.3788/OPE.20152302.0477
[本文引用: 1]
LIAO Hong-bo, FAN Shi-xun, HEI Mo, et al Modeling and parameter identification for electro-optical stabilized platform servo systems
[J]. Optics and Precision Engineering , 2015 , 23 (2 ): 477 - 484
DOI:10.3788/OPE.20152302.0477
[本文引用: 1]
Dissipative control for physical human-robot interaction
1
2015
... 随着我国现代化水平的发展,机器人应用已经渗入到了人们的实际生产生活中,机器人与自然人共享工作空间,提升人机工作效率持续受到关注,“人机共融”成为机器人应用的发展方向. 人们开始研究适用于人机交互的机器人[1 -6 ] . 典型交互型机器人具有人力引导功能,如手术机器人、康复机器人及协作机器人等[7 -11 ] ,机器人可以根据自然人外力的引导进行运动,进而完成示教. ...
A robust online touch pattern recognition for dynamic human-robot interaction
0
2010
Enabling multimodal human–robot interaction for the karlsruhe humanoid robot
0
2007
Human–robot interaction control of rehabilitation robots with series elastic actuators
0
2015
Passivity and stability of human–robot interaction control for upper-limb rehabilitation robots
0
2015
基于RGB-D传感器的室内服务机器人舒适跟随方法
1
2019
... 随着我国现代化水平的发展,机器人应用已经渗入到了人们的实际生产生活中,机器人与自然人共享工作空间,提升人机工作效率持续受到关注,“人机共融”成为机器人应用的发展方向. 人们开始研究适用于人机交互的机器人[1 -6 ] . 典型交互型机器人具有人力引导功能,如手术机器人、康复机器人及协作机器人等[7 -11 ] ,机器人可以根据自然人外力的引导进行运动,进而完成示教. ...
基于RGB-D传感器的室内服务机器人舒适跟随方法
1
2019
... 随着我国现代化水平的发展,机器人应用已经渗入到了人们的实际生产生活中,机器人与自然人共享工作空间,提升人机工作效率持续受到关注,“人机共融”成为机器人应用的发展方向. 人们开始研究适用于人机交互的机器人[1 -6 ] . 典型交互型机器人具有人力引导功能,如手术机器人、康复机器人及协作机器人等[7 -11 ] ,机器人可以根据自然人外力的引导进行运动,进而完成示教. ...
From passive tool holders to microsurgeons: safer, smaller, smarter surgical robots
1
2013
... 随着我国现代化水平的发展,机器人应用已经渗入到了人们的实际生产生活中,机器人与自然人共享工作空间,提升人机工作效率持续受到关注,“人机共融”成为机器人应用的发展方向. 人们开始研究适用于人机交互的机器人[1 -6 ] . 典型交互型机器人具有人力引导功能,如手术机器人、康复机器人及协作机器人等[7 -11 ] ,机器人可以根据自然人外力的引导进行运动,进而完成示教. ...
Online robot teaching with natural human–robot interaction
0
2018
Collaborative assembly in hybrid manufacturing cells: an integrated framework for human–robot interaction
0
2017
An integrated framework for human–robot collaborative manipulation
0
2014
Pneumatically attachable flexible rails for track-guided ultrasound scanning in robotic-assisted partial nephrectomy: a preliminary design study
1
2019
... 随着我国现代化水平的发展,机器人应用已经渗入到了人们的实际生产生活中,机器人与自然人共享工作空间,提升人机工作效率持续受到关注,“人机共融”成为机器人应用的发展方向. 人们开始研究适用于人机交互的机器人[1 -6 ] . 典型交互型机器人具有人力引导功能,如手术机器人、康复机器人及协作机器人等[7 -11 ] ,机器人可以根据自然人外力的引导进行运动,进而完成示教. ...
面向直接示教的机器人负载自适应零力控制
3
2017
... 零力控制是实现人力引导、直接拖动示教功能,有效提高机器人可交互性的一种经济且实用的方法. 零力控制下,自然人只需用很小的力(接近于零力)拖拽机器人时能够使得机器人顺应外力进行运动,是当下人机协同工作模式的研究热点[12 -15 ] . 机器人关节系统作为机器人系统的一个子系统,对其进行零力控制研究是提高机器人整体拖动示教性能的基础. ...
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
... [12 ]利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
面向直接示教的机器人负载自适应零力控制
3
2017
... 零力控制是实现人力引导、直接拖动示教功能,有效提高机器人可交互性的一种经济且实用的方法. 零力控制下,自然人只需用很小的力(接近于零力)拖拽机器人时能够使得机器人顺应外力进行运动,是当下人机协同工作模式的研究热点[12 -15 ] . 机器人关节系统作为机器人系统的一个子系统,对其进行零力控制研究是提高机器人整体拖动示教性能的基础. ...
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
... [12 ]利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
面向直接示教的机器人零力控制
4
2014
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
... [13 ]采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
... 分析机器人进行功率级脱离示教[13 ] 的情况,即关节电机处于自由状态,由自然人直接拖动连杆使其沿着一定的轨迹运动. 此时动力学方程(1)中 ${\tau _{\rm{m}}}(t) = 0$ . 联立方程(1)、(2)、(4),有 ...
... 通过实验对比设计的零力控制方法、基于重力矩与摩擦力矩补偿的零力控制方法[13 ] 以及功率级脱离示教在实际拖动示教中的应用效果. 不失一般性,制定如图9 所示的机器人单关节示教过程如下. ...
面向直接示教的机器人零力控制
4
2014
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
... [13 ]采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
... 分析机器人进行功率级脱离示教[13 ] 的情况,即关节电机处于自由状态,由自然人直接拖动连杆使其沿着一定的轨迹运动. 此时动力学方程(1)中 ${\tau _{\rm{m}}}(t) = 0$ . 联立方程(1)、(2)、(4),有 ...
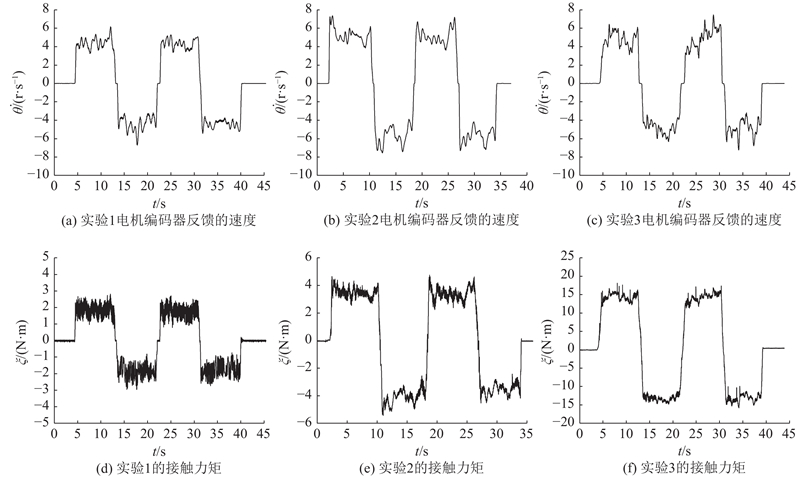
... 通过实验对比设计的零力控制方法、基于重力矩与摩擦力矩补偿的零力控制方法[13 ] 以及功率级脱离示教在实际拖动示教中的应用效果. 不失一般性,制定如图9 所示的机器人单关节示教过程如下. ...
基于弹性摩擦模型的机器人免力矩传感器拖动示教方法
1
2019
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
基于弹性摩擦模型的机器人免力矩传感器拖动示教方法
1
2019
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
Direct teaching of industrial manipulators using current sensors
2
2018
... 零力控制是实现人力引导、直接拖动示教功能,有效提高机器人可交互性的一种经济且实用的方法. 零力控制下,自然人只需用很小的力(接近于零力)拖拽机器人时能够使得机器人顺应外力进行运动,是当下人机协同工作模式的研究热点[12 -15 ] . 机器人关节系统作为机器人系统的一个子系统,对其进行零力控制研究是提高机器人整体拖动示教性能的基础. ...
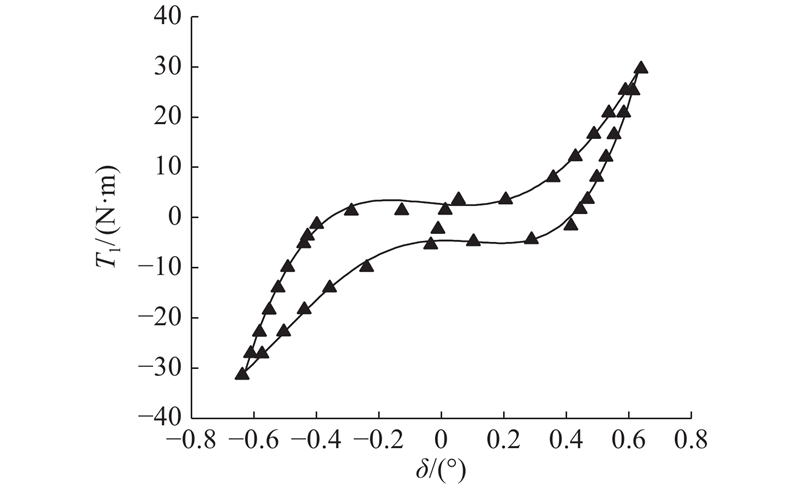
... 针对机器人零力拖动示教的应用场景,提出连杆侧无传感器的机器人柔性关节零力控制方法. 利用动态LuGre摩擦力矩模型,估计摩擦力矩. 采用2段4次多项式,建立系统刚度模型. 基于动量观测估计关节力矩,结合谐波减速器运动传递特性与建立的刚度模型估计连杆侧角度,估算连杆重力矩,由动力学方程得到接触力矩的估计值. 利用估计的力矩构建电机期望力矩,通过对该期望力矩的跟踪实现零力控制,在机器人关节系统装置上进行拖动示教实验,验证实际效果. 实验表明,与Yuan等[15 ] 的方法相比,采用提出的零力控制策略可以减小约50%的接触力矩. ...
1
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
Movemaster-EX机器人零力跟踪控制
1
1993
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
Movemaster-EX机器人零力跟踪控制
1
1993
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
Theoretical modelling and experimental identification of nonlinear torsional behaviour in harmonic drives
1
2013
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
A nonlinear model of a harmonic drive gear transmission
1
1996
... 机器人的零力控制,其实现上主要有基于位置控制[16 -19 ] 和基于力矩控制[12 -13 ] 2种方式. 基于位置实现零力控制时,关节电机驱动器工作于位置控制模式;基于力矩的方式实现零力控制,关节电机驱动器处于力矩控制模式,具有更快的响应速度. 当基于末端多维力传感器直接示教工业机器人时,可接触范围受到传感器安装位置的约束,因此侯澈等[12 ] 利用关节力矩传感器信息辨识机器人自身的重力,使得机器人拖动示教时可接触范围扩展到机器人整体,提出变负载自适应的零力控制方法. 游有鹏等[13 ] 采用基于自测量的重力矩及摩擦力矩计算方案,从机器人关节直驱电机的电流中提取机械臂重力矩及摩擦力矩,通过补偿重力矩以及摩擦力矩实现机器人无力传感器的零力控制. 当使用弹性摩擦模型对机器人进行摩擦估计时,在低速和静止状态下会产生较大的估计误差,将导致拖动示教时起动困难,张铁等[14 ] 对关节起动阶段的摩擦估计值进行规划,通过短暂增加关节摩擦的估计值以增加关节驱动力矩,实现关节的轻松拖动. 总结前人所作的工作,大多数的方法都假定机器人关节具有线性刚度. 协作机器人大多采用轻量化设计,其关节系统在物理结构上主要由伺服电机和谐波减速器组成,谐波减速器传动系统内部复杂的非线性摩擦效应及非线性刚度特性在模型建立时应当予以考虑[20 -21 ] . 在机器人关节连杆侧或者机器人关节中安装传感器需要额外的安装空间,增加实现成本. 综合以上考虑,有必要研究利用电机一侧的电磁力矩以及转子角度信息,结合谐波减速器非线性传动特性的重力矩、摩擦力矩与接触力矩的估计方法以及机器人关节系统的零力控制策略. ...
Sensorless torsion control of elastic-joint robots with hysteresis and friction
2
2015
... 在零力拖动示教应用下,机器人关节系统运行速度较小,因此忽略柔轮上速度相关的线性阻尼对传递力矩的损耗[22 ] . 对运动过程中的谐波减速器力矩传递和运动传递特性进行如下建模: ...
... 采用动量观测方法,对关节力矩 ${\tau _{\rm{l}}}$ [22 , 30 -32 ] . 定义电机侧动量: ...
Static friction in a robot joint: modeling and identification of load and temperature effects
2
2012
... 摩擦建模对于实现机器人的高性能控制至关重要. 摩擦模型一般可以分为静态摩擦模型与动态摩擦模型. 静态摩擦模型通常将摩擦力矩建模为速度的函数,即 ${T_{\rm{f}}} = f(\dot \theta )$ . 研究[23 -24 ] 表明,机器人关节摩擦力矩不仅具有速度相关性,而且包括迟滞、预滑动等诸多复杂的非线性特点[25 ] . 机器人研究中通过动态摩擦模型,以实现对摩擦现象更准确的描述. LuGre模型能够描述包括Stribeck效应、滑动与预滑动状态等大多数机器人关节摩擦特征,是机器人摩擦建模领域中常用的动态摩擦模型[23 , 26 -28 ] . 引入LuGre模型对 ${T_{\rm{f}}}$
... [23 , 26 -28 ]. 引入LuGre模型对 ${T_{\rm{f}}}$
Modeling and control of the Mitsubishi PA-10 robot arm harmonic drive system
1
2005
... 摩擦建模对于实现机器人的高性能控制至关重要. 摩擦模型一般可以分为静态摩擦模型与动态摩擦模型. 静态摩擦模型通常将摩擦力矩建模为速度的函数,即 ${T_{\rm{f}}} = f(\dot \theta )$ . 研究[23 -24 ] 表明,机器人关节摩擦力矩不仅具有速度相关性,而且包括迟滞、预滑动等诸多复杂的非线性特点[25 ] . 机器人研究中通过动态摩擦模型,以实现对摩擦现象更准确的描述. LuGre模型能够描述包括Stribeck效应、滑动与预滑动状态等大多数机器人关节摩擦特征,是机器人摩擦建模领域中常用的动态摩擦模型[23 , 26 -28 ] . 引入LuGre模型对 ${T_{\rm{f}}}$
Revisiting the LuGre friction model
1
2009
... 摩擦建模对于实现机器人的高性能控制至关重要. 摩擦模型一般可以分为静态摩擦模型与动态摩擦模型. 静态摩擦模型通常将摩擦力矩建模为速度的函数,即 ${T_{\rm{f}}} = f(\dot \theta )$ . 研究[23 -24 ] 表明,机器人关节摩擦力矩不仅具有速度相关性,而且包括迟滞、预滑动等诸多复杂的非线性特点[25 ] . 机器人研究中通过动态摩擦模型,以实现对摩擦现象更准确的描述. LuGre模型能够描述包括Stribeck效应、滑动与预滑动状态等大多数机器人关节摩擦特征,是机器人摩擦建模领域中常用的动态摩擦模型[23 , 26 -28 ] . 引入LuGre模型对 ${T_{\rm{f}}}$
Precise control of elastic joint robot using an interconnection and damping assignment passivity-based approach
1
2016
... 摩擦建模对于实现机器人的高性能控制至关重要. 摩擦模型一般可以分为静态摩擦模型与动态摩擦模型. 静态摩擦模型通常将摩擦力矩建模为速度的函数,即 ${T_{\rm{f}}} = f(\dot \theta )$ . 研究[23 -24 ] 表明,机器人关节摩擦力矩不仅具有速度相关性,而且包括迟滞、预滑动等诸多复杂的非线性特点[25 ] . 机器人研究中通过动态摩擦模型,以实现对摩擦现象更准确的描述. LuGre模型能够描述包括Stribeck效应、滑动与预滑动状态等大多数机器人关节摩擦特征,是机器人摩擦建模领域中常用的动态摩擦模型[23 , 26 -28 ] . 引入LuGre模型对 ${T_{\rm{f}}}$
Adaptive block compensation trajectory tracking control based on LuGre friction model
0
2019
基于卷积力矩观测器与摩擦补偿的机器人碰撞检测
1
2019
... 摩擦建模对于实现机器人的高性能控制至关重要. 摩擦模型一般可以分为静态摩擦模型与动态摩擦模型. 静态摩擦模型通常将摩擦力矩建模为速度的函数,即 ${T_{\rm{f}}} = f(\dot \theta )$ . 研究[23 -24 ] 表明,机器人关节摩擦力矩不仅具有速度相关性,而且包括迟滞、预滑动等诸多复杂的非线性特点[25 ] . 机器人研究中通过动态摩擦模型,以实现对摩擦现象更准确的描述. LuGre模型能够描述包括Stribeck效应、滑动与预滑动状态等大多数机器人关节摩擦特征,是机器人摩擦建模领域中常用的动态摩擦模型[23 , 26 -28 ] . 引入LuGre模型对 ${T_{\rm{f}}}$
基于卷积力矩观测器与摩擦补偿的机器人碰撞检测
1
2019
... 摩擦建模对于实现机器人的高性能控制至关重要. 摩擦模型一般可以分为静态摩擦模型与动态摩擦模型. 静态摩擦模型通常将摩擦力矩建模为速度的函数,即 ${T_{\rm{f}}} = f(\dot \theta )$ . 研究[23 -24 ] 表明,机器人关节摩擦力矩不仅具有速度相关性,而且包括迟滞、预滑动等诸多复杂的非线性特点[25 ] . 机器人研究中通过动态摩擦模型,以实现对摩擦现象更准确的描述. LuGre模型能够描述包括Stribeck效应、滑动与预滑动状态等大多数机器人关节摩擦特征,是机器人摩擦建模领域中常用的动态摩擦模型[23 , 26 -28 ] . 引入LuGre模型对 ${T_{\rm{f}}}$
1
... 式中: $z$ ${{{T}}_{\rm{c}}}$ ${{{T}}_{\rm{s}}}$ ${{\rm{\dot \theta }}_{\rm{s}}}$ [29 ] 收敛速度, ${\rm{\alpha }}$ ${{\rm{\sigma }}_{0}}$ ${{\rm{\sigma }}_{1}}$ ${{\rm{\sigma }}_{2}}$ ${\hat T_{\rm{f}}}$
Modeling, observation, and control of hysteresis torsion in elastic robot joints
1
2014
... 采用动量观测方法,对关节力矩 ${\tau _{\rm{l}}}$ [22 , 30 -32 ] . 定义电机侧动量: ...
机器人带未知负载条件下的碰撞检测算法
0
2020
机器人带未知负载条件下的碰撞检测算法
0
2020
基于扰动观测器的机械手碰撞检测与安全响应
1
2012
... 采用动量观测方法,对关节力矩 ${\tau _{\rm{l}}}$ [22 , 30 -32 ] . 定义电机侧动量: ...
基于扰动观测器的机械手碰撞检测与安全响应
1
2012
... 采用动量观测方法,对关节力矩 ${\tau _{\rm{l}}}$ [22 , 30 -32 ] . 定义电机侧动量: ...
1
... 式中: ${{L}} > 0$ $\hat p$ [33 -34 ] , ...
A geometric approach to nonlinear fault detection and isolation
1
2001
... 式中: ${{L}} > 0$ $\hat p$ [33 -34 ] , ...
Torque estimation for robotic joint with harmonic drive transmission based on position measurements
1
2015
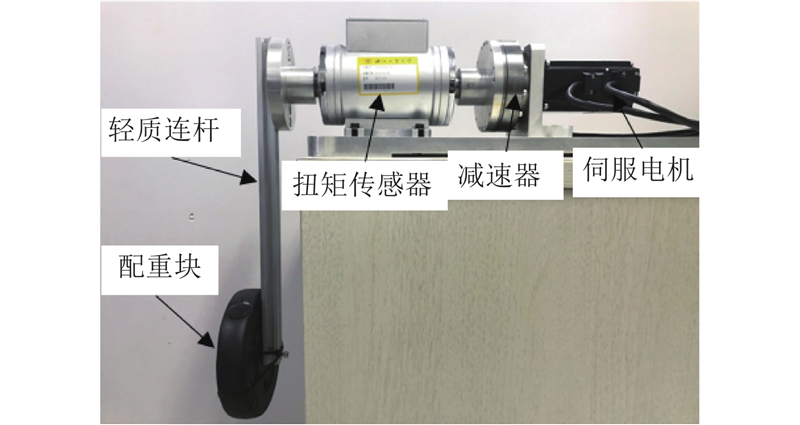
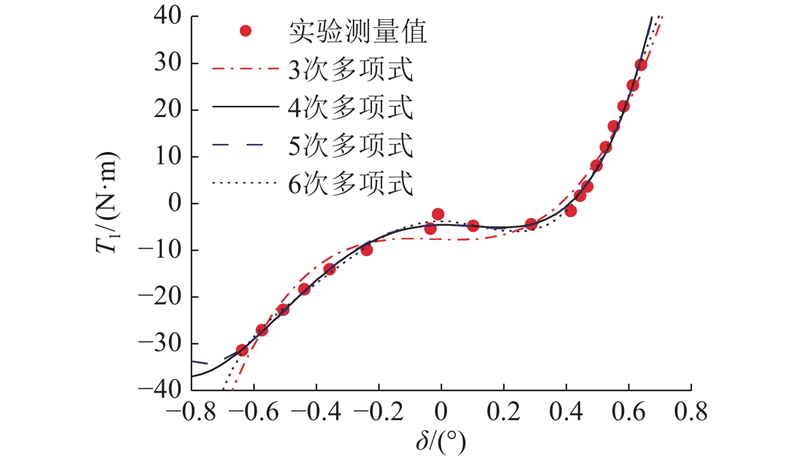
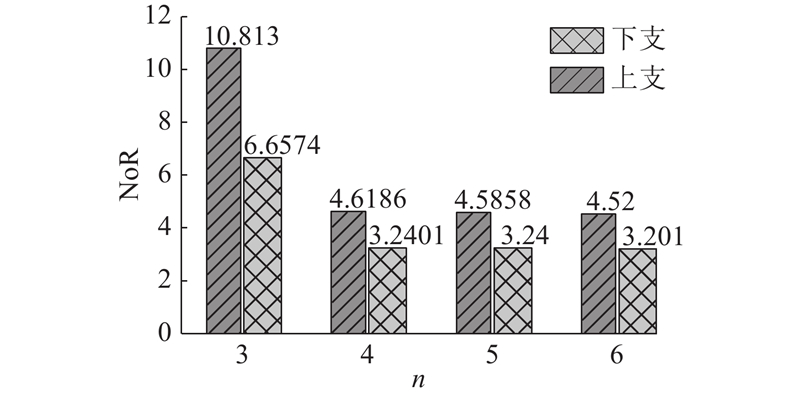
... 在连杆转轴上同轴安装高分辨率编码器,用于测量扭转位移 ${\delta }$ ${T_{\rm{l}}}$ ${\delta }$ [35 ] . 如图4 所示为刚度曲线上支实验数据点以及3次多项式、4次多项式、5次多项式、6次多项式对实验数据点的拟合结果,上、下两支对应的拟合残差模(norm of residual,NoR)如图5 所示. 实验结果表明,多项式次数越高,对刚度曲线的拟合效果越好. 当次数高于4次后,随着多项式次数的增加,对应的拟合精度增益逐渐减小. ...
Distributed component friction model for precision control of a feed drive system
1
2015
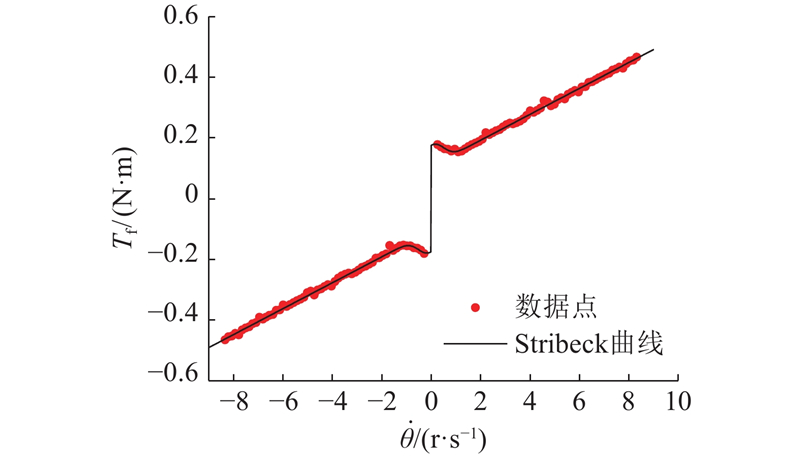
... 将LuGre模型中经验参数 ${\rm{\alpha }}$ ${{\rm{\dot \theta }}_{\rm{s}}}$ [36 ] . 利用实验中测得不同速度对应的 ${T_{\rm{f}}}$ ${{{T}}_{\rm{c}}}$ ${{{T}}_{\rm{s}}}$ ${{{\sigma }}_{2}}$ ${{\alpha }}$ ${{\rm{\dot \theta }}_{\rm{s}}}$ 图7 的实线所示. ...
光电稳定平台伺服系统动力学建模与参数辨识
1
2015
... 根据得到的辨识结果,选取 $\left| {{\tau _{\rm{m}}}} \right| < \left| {{{{T}}_{\rm{s}}}} \right|$ $\dot z \approx \dot \theta $ $z(0) = \theta (0) = 0$ $z \approx \theta $ . 由式(9)可知,角位移与力矩的关系可以等效为二阶系统[37 ] ,阻尼比为 $({{\rm{\sigma }}_{1}} + {{\rm{\sigma }}_{2}})/\sqrt {{4}{{\rm{\sigma }}_{0}}{{{J}}_{\rm{m}}}}$ $\sqrt {{{\rm{\sigma }}_{0}}/{{{J}}_{\rm{m}}}}$ 图8 所示. 根据“三点法”求解图8 阶跃响应曲线的表达式,得到阻尼比与自然振荡频率,从而得到LuGre模型摩擦力矩参数 ${{\rm{\sigma }}_{0}}$ ${{\rm{\sigma }}_{1}}$ . 得到的参数辨识结果如表4 所示. ...
光电稳定平台伺服系统动力学建模与参数辨识
1
2015
... 根据得到的辨识结果,选取 $\left| {{\tau _{\rm{m}}}} \right| < \left| {{{{T}}_{\rm{s}}}} \right|$ $\dot z \approx \dot \theta $ $z(0) = \theta (0) = 0$ $z \approx \theta $ . 由式(9)可知,角位移与力矩的关系可以等效为二阶系统[37 ] ,阻尼比为 $({{\rm{\sigma }}_{1}} + {{\rm{\sigma }}_{2}})/\sqrt {{4}{{\rm{\sigma }}_{0}}{{{J}}_{\rm{m}}}}$ $\sqrt {{{\rm{\sigma }}_{0}}/{{{J}}_{\rm{m}}}}$ 图8 所示. 根据“三点法”求解图8 阶跃响应曲线的表达式,得到阻尼比与自然振荡频率,从而得到LuGre模型摩擦力矩参数 ${{\rm{\sigma }}_{0}}$ ${{\rm{\sigma }}_{1}}$ . 得到的参数辨识结果如表4 所示. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}