

交通流量分布是所有出行者的出行过程在道路网络上的集计,从本质上来看,交通流量分布状态是由出行者个体所决定的. 在过去几十年内,许多方法被用来研究出行者行为. 假设每个出行者都选择路径时间最小的出行路线,20世纪50年代Wardrop[3]据此提出了用户均衡(user equilibrium,UE)理论. 考虑到出行者对路径出行时间的感知具有一定的随机误差,Daganzo等[4]提出了随机用户均衡(stochastic user equilibrium,SUE)模型. 许多学者利用随机环境下的交通网络均衡模型来描述交通系统中的不确定因素[5-6];近年来,交通学者认为出行者不仅关注当前网络状况,往往还考虑自己以往的出行经验,因此提出了逐日动态交通均衡模型[7-8].
近年来,交通出行演化模型一直受到国内外交通学者的广泛关注. 根据稳定状态的不同,模型可以分为UE型和SUE型演化模型. UE型出行行为决策机制的研究主要包括Smith比例调整过程[9]、改进Smith比例调整过程[10]、网络纠错过程[11]、投影动态调整过程[12]、先进先出规则[13]、Brown-von Neumann-Nash调整过程[14]和理性行为调整过程[15]. Watling等[16-18]在SUE型出行行为决策机制上作了很多研究. 关于其他类型的出行演化模型,Guo等[19-20]提出了有限理性下交通流逐日演化模型. Ye等[21]进一步将该模型扩展到理性行为调整过程中. Cheng等[8]研究了先进出行者信息系统下的动态交通演化过程. 刘天亮等[22-23]在交通量逐日演化模型的基础上考虑出行者风险行为,建立了基于出行风险的交通演化模型.
上述文献运用不同方法对动态交通演化模型进行了研究,存在一些不足:1)智慧公路实时提供道路网络运行状况,已有交通演化研究没有考虑智慧公路对模型的影响;2)多源数据融合技术在各个领域得到了快速发展,但很少有研究将数据融合技术应用到路径选择行为建模上;3)已有智慧公路的研究均从实际工程应用角度出发,缺乏从理论角度深入解析智慧公路与交通网络设计的关系.
为此,本文研究路网中同时存在普通公路和智慧公路的情况下居民出行的交通演化过程,其中普通公路上的出行者在选择路径时,不仅考虑预测的路网出行时间,还考虑自身的出行经验;智慧公路提供多源数据,通过融合交通数据,出行者获得实时路网出行时间,进而决策自己的出行,其中在计算出行时间时本文同时考虑交通网络的不确定性. 最后运用算例网络测试模型的基本原理和应用价值.
1. 多源数据融合及随机网络模型
1.1. 智慧公路多源数据融合
在智慧公路上布设线圈、视频、微波、地磁等交通检测器,同时结合无线通讯和GPS车载定位技术,实时捕捉路段上的交通流量、速度、密度、旅行时间等. 由于数据量纲不一致,运用交通流理论对多源数据类型进行统一化处理. 本研究采用Green Shields交通流量-速度-密度关系[29]对观测的多源数据进行转换,统一为道路流量:
式中:
通过式(1),将获取的路段速度、密度、旅行时间等变量转换为路段流量,进一步运用最小方差加权平均方法融合统一后的道路流量,其数学表达形式为
式中:
可知,
对于实际路网中捕捉的流量、速度、密度、旅行时间等数据,预先无法获知检测数据的精度,因此也无法预知基于单一数据的交通决策效果,而数据融合技术通过对不同来源数据的综合处理,可以有效降低这一不足,同时能弥补部分观测源数据缺失的状况. 本文提出的数据融合方法中对方差大的观测数据类型给予较小的权重系数,一定程度上增加了融合数据的可靠性.
1.2. 随机网络下交通出行均衡模型
道路容量的退化引起路段和路径出行时间的可变性. 从数学角度来看,路径出行时间
式中:
为便于理解可靠出行时间,假定路径出行时间服从参数为1.73和0.08的对数正态分布,图1绘制了出行时间的概率密度和积累分布曲线,可以看出交通参与者在可靠出行时间
图 1
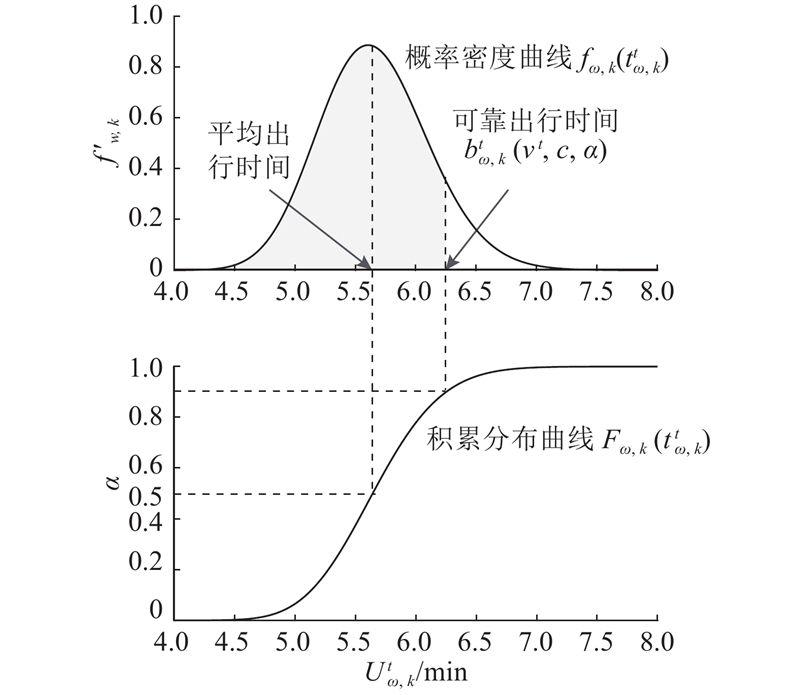
图 1 随机网络下出行时间概率曲线
Fig.1 Probability curve of travel time under stochastic network
根据积累分布函数关系,式(3)等价为
式中:
进一步对式(4)求逆,可得
式中:
在出行过程中,用户倾向于选择可靠出行时间最短的路径完成出行,因此在随机网络交通均衡状态下,没有用户能够通过单方面的路径变更行为,来减小自己的感知可靠出行时间. 换句话说,起讫点间所有使用路径的感知可靠出行时间是相等且最小的. 这与传统的随机用户均衡模型(SUE)的均衡状态是一致的. 对任意
式中:
式中:
式中:q为
式中:
2. 智慧公路多源数据下交通出行演化模型
2.1. 交通出行演化框架
交通出行通常包含经验学习和路径调整2个过程. 经验学习即在第
在智慧公路出行演化过程中,智慧公路上的多源数据可以实时提供当前路径信息,因此在智慧公路上行驶的出行者可以提前预知道路状况,而不需要根据历史经验来预测当前路网出行状况. 在路网中同时包含智慧公路和普通公路时,交通出行演化框架如图2所示.
图 2
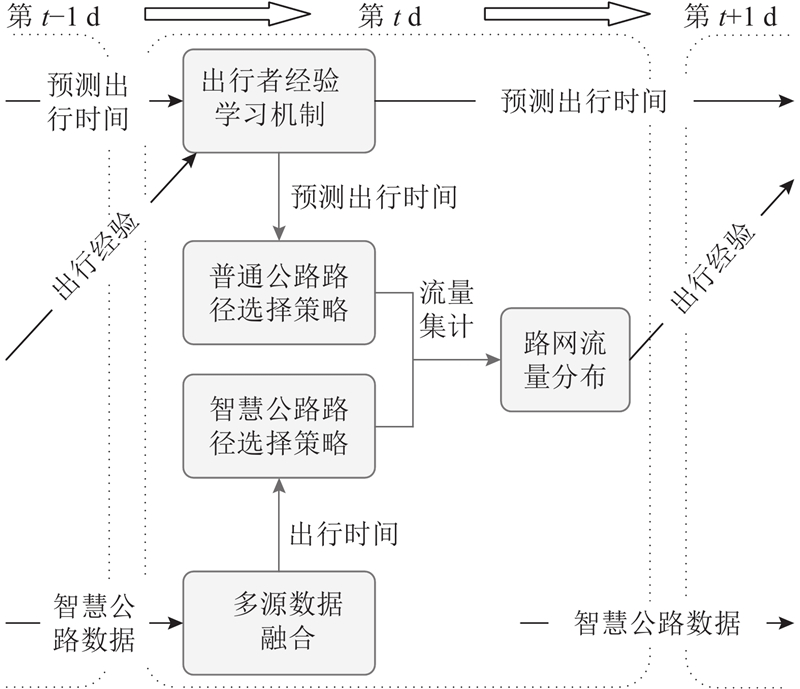
图 2 随机网络下智慧公路交通出行演化模型框架
Fig.2 Evolution model framework of traffic trips on intelligent highway under stochastic network
2.2. 演化模型
在普通公路上,出行者在第
式中:
式中:
在智慧公路上,出行者根据智慧公路提供的道路信息,获知智慧公路第
其向量形式为
采用概率型路径选择模型(即式(6))描述出行者的路径调整过程,路径交通流量逐日调整方程如下:
式中:
可知路网流量逐日调整量为
通过整合式(11)、(13)和(15),得到智慧公路多源数据下交通出行演化模型为
式中:参数
2.3. 模型解的性质
定理1(等价性)如果模型(式(17))的不动点存在,那么该不动点等价于随机路网流量均衡解.
证明:根据不动点动力演化系统[30],模型(式(17))的不动点满足条件:
将上述公式代入模型(式(17))可以得到
这刚好符合SUE均衡条件[4],因此定理1得证.
为研究模型解的存在性、唯一性和稳定性,给出路径出行时间函数和路径选择概率的数学假设.
假设1:路径可靠出行时间
假设2:路径选择概率
在交通网络理论中,路段流量为经过该路段的所有路径流量和,路段出行时间为路段流量的连续函数,路径出行时间关于路段出行时间连续,因此路径出行时间也关于路径流量连续. 进一步根据式(5)得,
定理2模型(式(17))存在均衡解.
证明:根据布劳威尔不动点定理[30],从一个欧几里得空间的某个闭凸子集到其自身的连续映射至少存在一个不动点. 由于交通需求
如果路径可靠出行时间关于路径流量单调递增,且路径选择概率关于预测可靠出行时间单调递减,那么模型解唯一. 通常路径阻抗与路径流量之间关系复杂,路径阻抗并不一定是路径流量的单调递增函数,因此模型(式(17))解的唯一性并不能得到保证.
为研究模型(式(17))解的稳定性,根据非线性离散动力系统理论,将演化模型(式(17))表示成如下离散动力系统形式:
由于
式中:
式中:
根据不动点稳定性条件[30],当且仅当雅克比矩阵(式(20))的所有特征值都在单位圆内,演化模型(式(17))是稳定的. 由式(式(20))可知,出行者出行经验偏好程度
2.4. 可靠出行时间
采用通常使用的美国联邦公路局路段特性函数[31]来描述路段阻抗:
式中:
根据文献[6],道路容量服从
式中:
在路段通行能力和出行时间相互独立的情况下,进一步推导出路径出行时间的均值和方差分别为
由于路径出行时间为多条路段出行时间的和,根据中心极限定理可得路径出行时间近似服从多元正态分布形式
进一步根据式(5)推导出可靠出行时间为
式中:
3. 算例分析
本章分别运用一个小网络和Nguyen-Dupuis网络[32]描述建立模型的基本思想和应用性.
3.1. 小网络
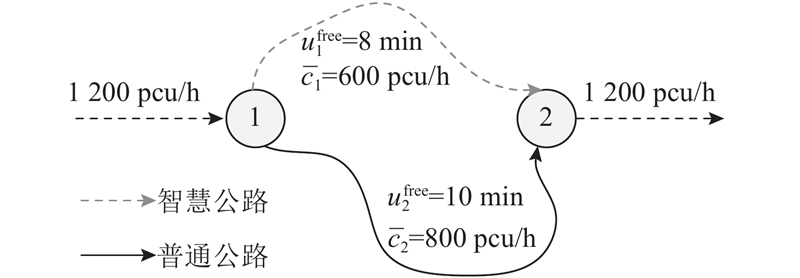
图3给出了测试网络拓扑结构和路段属性,该网络由2个结点、2个路段(1条智慧公路和1条普通公路)和1个起讫点组成. 其中高峰小时OD交通量为1 200 pcu/h,智慧公路的自由旅行时间和道路容量上界分别为8 min和600 pcu/h,普通公路的自由旅行时间和道路容量上界分别为10 min和800 pcu/h.
图 3
假设道路网初始流量状态为
图 4

图 4 不同行为参数下的交通量逐日演化过程
Fig.4 Processes of day-to-day traffic flow evolution under different behavioral parameters
进一步测试出行者感知时间误差
图 5
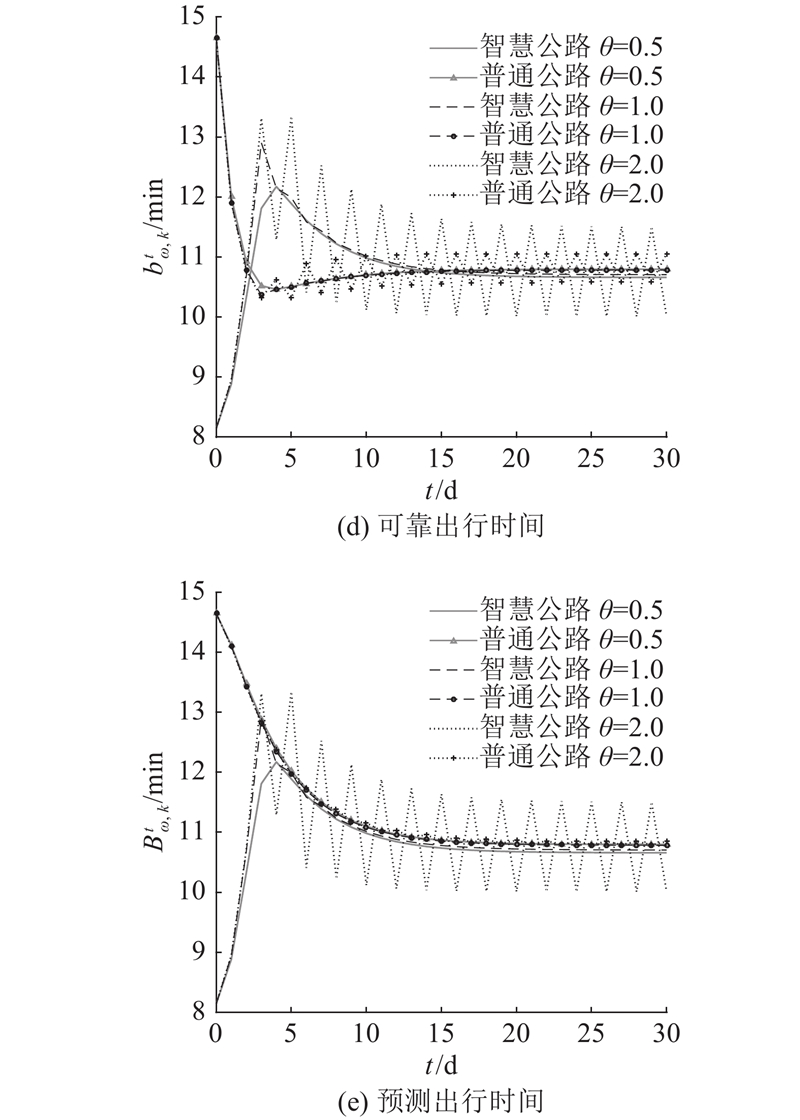
图 5 不同参数下的均衡解逐日演化过程
Fig.5 Processes of day-to-day equilibrium solutions with different parameters
同样普通公路可靠出行时间为
同样普通公路上路径选择概率为
在上述算例测试中,智慧公路上的数据均采用前一天出行均衡后的路段流量来计算当前可靠出行时间值,图6描绘了多源和单源观测数据下智慧路段流量演化规律. 智慧公路长度、拥挤密度和最大行驶速度分别为8 km、40 pcu/km和60 km/h. 实验时分别单独观测路段旅行时间、行程速度和路段流量3个变量,为了检测多源数据融合的效果,分别给予这3个观测变量一定的扰动:−1%、2%和0.5%,其余参数与图4(a)测试参数保持一致. 从图6中可以看出,当检测数据存在扰动时,模型估计出来的路段流量也会产出误差;同时数据融合后推断的最优解虽然不如部分单源数据(观测流量存在0.5%的误差)估计的流量值精度高,但使用融合数据不会出现估计结果误差过大的情况,比如单纯使用路段旅行时间和行程速度估计的路段流量误差过大. 在实际网络规划过程中,无法获知检测数据的精度高低,因此数据融合方法是一种折中的方法. 在最小方差加权平均方法融合(式(2))中,方差越大,权重系数越小,因此这种折中方法更倾向于选择稳定性高的数据,并且使用融合数据进行交通流量演化更具鲁棒性. 同时当部分检测器数据存在缺失时,融合数据更能显示其优越性.
图 6
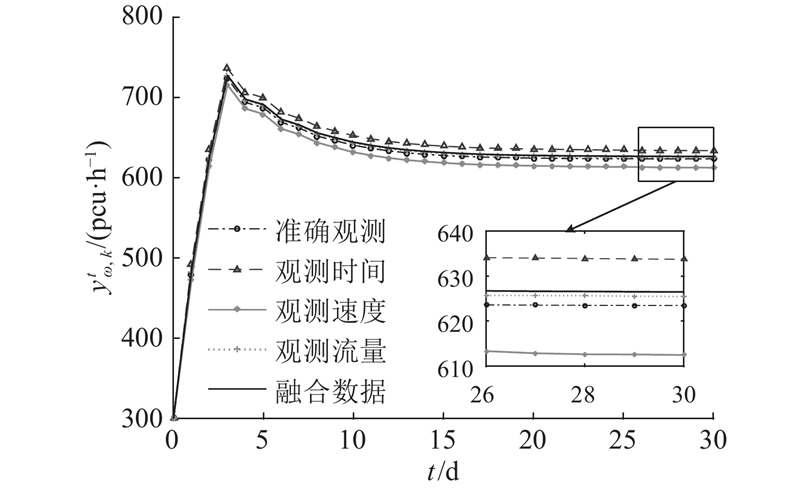
图 6 多源和单源观测数据下智慧公路流量演化过程
Fig.6 Processes of intelligent highway flows evolution under observed multi-source and single-source data
3.2. Nguyen-Dupuis网络
Nguyen-Dupuis网络由13个结点、4个起讫点和19条路段组成. 网络的拓扑结构、路段属性和交通需求量如图7所示. 网络中路段5-6、6-7和6-10为智慧路段,将路段容量上界与下界的比例系数设为
图 7

图 7 Nguyen-Dupuis网络拓扑结构、路段属性和交通需求量
Fig.7 Topology, link characteristics and OD demands of Nguyen-Dupuis network
在道路出行者感知误差程度
图 8

图 8 不同行为参数下评价指标演化过程
Fig.8 Processes of evaluation index evolution with different behavioral parameters
可以看出,当
进一步研究智慧公路数量分别增加到4、5、6、7对模型解的影响状况. 经过测试发现,智慧公路数量的增加对模型收敛解没有显著影响,但随着智慧公路数量的增加,模型收敛速度增快,其中当智慧公路数量4、5、6、7条时收敛天数分别为45、41、38和37.
出行者风险态度
图 9

图 9 不同风险态度下模型稳定性比较
Fig.9 Comparisons of model stabilities under different risk attitudes
根据第2.3节可知,建立的出行演化模型(式(17))解的唯一性并不能得到保证,因为路径阻抗不一定是路径流量的单调递增函数. 第2.4节中的可靠路径时间建模采用文献[6]中道路容量服从均匀分布这一路网不确定性因素,此时路段出行时间均值和方差均关于路段流量
4. 结 论
(1)本研究运用交通流理论对智慧公路获取的多源数据进行转化,从而统一观测变量为路段流量,进一步采用最小方差加权平均方法融合路段流量信息. 提出了智慧公路多源数据下的交通出行演化模型,在考虑交通网络不确定性的基础上,该模型假定智慧公路上的出行者根据实时信息进行路径选择,普通公路上的出行者根据历史出行经验和前一天的出行时间信息来决策当日出行策略. 采用不动点理论证明了模型解的等价性、存在性、唯一性和稳定性条件.
(2)通过算例测试了建立演化模型的性能,结果表明:出行时间行为系数的增大会增加模型收敛速度,而道路流量行为系数的增大会导致模型进入不稳定状态. 在本文小网络算例中,当
后续将进行连续型交通出行演化研究,并进一步将建立的演化模型应用到实际网络中.
参考文献
Combined route choice and adaptive traffic control in a day-to-day dynamical system
[J].DOI:10.1007/s11067-014-9248-4 [本文引用: 1]
Global convergence of the trial-and-error method for the traffic-restraint congestion-pricing scheme with day-to-day flow dynamics
[J].DOI:10.1016/j.trc.2016.06.009 [本文引用: 1]
Some theoretical aspects of road traffic research
[J].DOI:10.1057/jors.1953.23 [本文引用: 1]
On stochastic models of traffic assignment
[J].DOI:10.1287/trsc.11.3.253 [本文引用: 3]
The α-reliable mean-excess traffic equilibrium model with stochastic travel times
[J].DOI:10.1016/j.trb.2009.11.003 [本文引用: 1]
Degradable transport network: travel time budget of travelers with heterogeneous risk aversion
[J].DOI:10.1016/j.trb.2005.10.003 [本文引用: 3]
The dynamics and equilibria of day-to-day assignment models
[J].DOI:10.1023/A:1025398302560 [本文引用: 1]
A mixed stochastic user equilibrium model considering influence of advanced traveller information systems in degradable transport network
[J].DOI:10.1007/s11771-018-3817-5 [本文引用: 2]
A continuous day-to-day traffic assignment model and the existence of a continuous dynamic user equilibrium
[J].DOI:10.1007/BF02031940 [本文引用: 1]
多模式交通网络路径动态调整模型
[J].DOI:10.3969/j.issn.1009-6744.2014.03.019 [本文引用: 1]
Route-swapping dynamic model on multi-modal traffic network
[J].DOI:10.3969/j.issn.1009-6744.2014.03.019 [本文引用: 1]
Day-to-day dynamic network disequilibria and idealized traveler information systems
[J].DOI:10.1287/opre.42.6.1120 [本文引用: 1]
On the local and global stability of a travel route choice adjustment process
[J].
A dynamical system model of the traffic assignment problem
[J].
Day-to-day stationary link flow pattern
[J].
Link-based day-to-day network traffic dynamics and equilibria
[J].DOI:10.1016/j.trb.2014.11.005 [本文引用: 1]
Stability of the stochastic equilibrium assignment problem: a dynamical systems approach
[J].
基于随机用户均衡的交通配流演化动态系统模型
[J].DOI:10.12011/1000-6788(2015)12-3192
A dynamical system model of formulating day-to-day traffic assignment based on stochastic user equilibrium
[J].DOI:10.12011/1000-6788(2015)12-3192
弹性需求下的网络交通流逐日动态演化
[J].
Day-to-day dynamical evolution of network traffic flow with elastic demand
[J].
Bounded rationality and irreversible network change
[J].
有限理性视野下网络交通流逐日演化规律研究
[J].
Day-to-day dynamical evolution of network traffic flow under bounded rational view
[J].
Rational behavior adjustment process with boundedly rational user equilibrium
[J].
考虑风险规避和认知更新的日常择路行为演进
[J].DOI:10.3321/j.issn:1671-1637.2008.04.018 [本文引用: 1]
Evolution of day-to-day route choice behavior considering risk aversion and perception updating
[J].DOI:10.3321/j.issn:1671-1637.2008.04.018 [本文引用: 1]
Engine fault diagnosis based on multi-sensor information fusion using Dempster-Shafer evidence theory
[J].DOI:10.1016/j.inffus.2005.07.003 [本文引用: 1]
Some remarks on Kalman filters for the multisensor fusion
[J].DOI:10.1016/S1566-2535(02)00070-2 [本文引用: 1]
Data fusion neural network for tool condition monitoring in CNC milling machining
[J].DOI:10.1016/S0890-6955(99)00066-8 [本文引用: 1]
An efficient method for computing traffic equilibria in networks with asymmetric transportation costs
[J].DOI:10.1287/trsc.18.2.185 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}