

作为智能车的关键技术之一,目前已有许多学者对智能车轨迹跟踪进行了研究,提出许多控制方法. MacAdam[4]建立预瞄最优控制驾驶员模型,采用最优控制理论,计算方向盘转角;Guo等[5]最早提出预瞄-跟随系统理论,建立驾驶员预瞄最优曲率模型;姜立标等[6]采用新型的趋近率设计滑模控制轨迹跟踪控制器,提高了状态的趋近速度并消除了抖振;Soudbakhsh等[7]采用滑模控制设计轨迹跟踪控制器,与LQR控制器进行对比,结果表明,该控制器对横摆角的跟踪优于LQR控制器;李兵[8]结合滑模控制和RBF神经网络,设计车辆轨迹跟踪控制器,使车辆能够较好地跟踪期望轨迹;龚建伟等[9-13]采用模型预测控制实现轨迹跟踪控制,使车辆在保证稳定性的同时具有较高的跟踪精度,但模型预测控制在线优化比较耗时且对模型精度要求较高;Wang等[14]基于鲁棒反步滑模控制理论设计轨迹跟踪控制器,该控制器在轨迹跟踪精度和收敛速度方面均优于滑模控制器. Calzolari等[15]对8种典型的轨迹跟踪控制器进行对比,分析每种控制器在抑制模型不确定性、噪声和扰动方面的优缺点. 为了描述车辆参数的时变特性,Guo等[16]设计线性时变车辆侧向动力学模型,基于线性矩阵不等式设计鲁棒变增益控制器,保证轨迹跟踪精度和系统的鲁棒性. Xia等[17]采用自抗扰技术设计轨迹跟踪控制器,该控制器具有较强的鲁棒性;吴艳等[18]基于终端滑模控制和自抗扰控制,设计滑模自抗扰轨迹跟踪控制器,该控制器在保证车辆稳定性的同时,能够精确、快速地跟踪期望轨迹.
针对智能车轨迹跟踪控制,本文提出基于线性矩阵不等式(LMI)的轨迹跟踪控制器. 考虑到传统车辆侧向动力学状态空间模型不可控,进行适当的坐标变换,得到基于跟踪误差的车辆侧向动力学状态空间模型;采用饱和线性轮胎模型,推导出车辆侧向动力学多胞型模型,设计LMI反馈控制器和前馈控制器,与模型预测控制器(MPC)和预瞄驾驶员模型(PDM)控制器进行对比.
1. 车辆模型
图 1
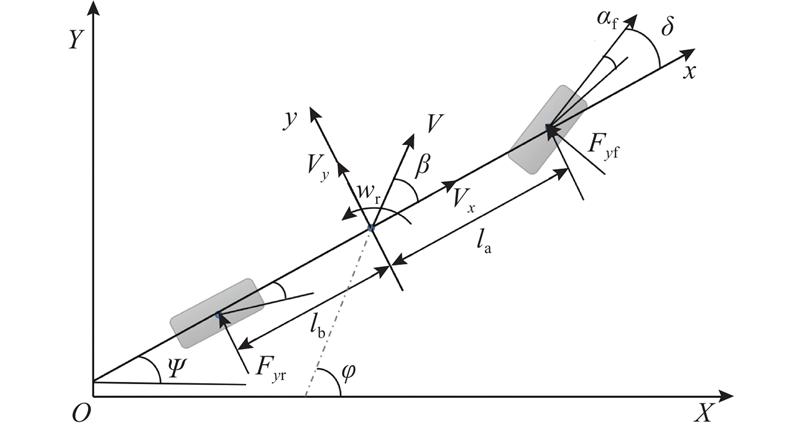
侧向运动方程为
横摆运动方程为
式中:m为车辆质量,Iz为车辆横摆转动惯量,ψ为车辆的横摆角,wr为横摆角速度,φ为车辆航向角,y为侧向位移,Vx和Vy为车辆坐标系下车辆质心处的纵向和侧向速度,la和lb分别为车辆质心到前后轴距离,Fyf和Fy r分别为车辆前、后轴的侧向力.
当轮胎侧偏角较小时,侧向力和侧偏角为线性关系,并采用小角度假设,轮胎侧向力可以线性化为
式中:Cαf为每个前轮胎的侧偏刚度,Cαr为每个后轮胎的侧偏刚度,δ为前轮转角.
将式(3)代入式(1)、(2),可得车辆侧向动力学状态空间模型:
2. 轨迹跟踪控制器设计
2.1. 车辆侧向动力学多胞型模型
期望侧向加速度可以表示为
定义
当车辆行驶速度一定时,
将式(7)、(8)代入式(4),可得基于跟踪误差的车辆侧向动力学状态空间模型[19]为
式中:
车辆在邻近失稳的情况下轮胎会进入非线性区,线性二自由度车辆模型将不适合表示此时的车辆动力学特性,并且轮胎的侧偏刚度会随着垂直载荷、轮胎磨损、路面附着系数、轮胎进入非线性区等因素发生变化. 采用饱和线性轮胎,对轮胎的侧偏刚度进行修正[20]:
式中:Cf、Cr分别为修正后的前后轮胎侧偏刚度;kf、kr分别为前、后轮胎侧偏刚度修正系数.
将式(10)代入式(9),可得时变的车辆侧向动力学状态空间矩阵(Ac,Bc,dc). 当车速一定时,该矩阵随着前、后轮胎侧偏刚度修正系数的变化而变化,系统矩阵和控制矩阵的线性时变形式可以表示为
记kf、kr的最大值和最小值分别为kfmax、kfmin和krmax、krmin,2个参数可以组成4个顶点:
于是得到顶点处的局部线性状态矩阵:
对顶点处的状态空间模型进行离散化,当采样时间Ts较小时,可以舍去高阶项得到[21]:
离散后的车辆侧向动力学方程可以表示为
式中[22]:
从式(16)可知,离散后的车辆侧向动力学模型本质上是一个多胞型模型,对于非负常数αi(i=1,2,3,4),A和B[23]可以表示为
2.2. LMI反馈控制器设计
线性矩阵不等式(LMI)问题具有较小的计算复杂度,在迭代结束时更容易获得接近全局最优的解,已有高效的算法解决这类问题,基于LMI的优化问题更容易在线实现[23].
设计LMI控制器时,忽略系统的扰动项
类似于线性鲁棒控制,定义一个鲁棒性能目标函数,求解控制量,使得目标函数在不确定集Ω上的最大值最小:
式中:鲁棒性能目标函数为
这是一个min-max问题,直接计算比较复杂,因此需要找到目标函数的上界,定义二次函数:
在采样点k,假设V(x)满足鲁棒稳定性约束:
式中:
若式(20)表示的目标函数是有界的,则x(∞|k)=0,因此V(x(∞|k))=0,对式(20)从i=0到i=∞进行累加,可得
因此,
不等式(24)给出目标函数的上界,鲁棒MPC算法的目标是在每个采样点k计算一个恒定的状态反馈控制律u(k+i|k)=Fx(k+i|k),使得目标函数(20)的上界V(x(k|k))最小,对于标准的MPC,仅第一个控制量u(k|k)=F x(k|k)作用于系统,令
式中:Q为正定对称矩阵,Q>0,Q=QT.
该优化问题可以转化为如下LMI问题:
约束条件为
对于单输入系统,控制量约束可以表示为
2.3. 前馈控制器设计
设计的LMI反馈控制器是在忽略扰动项的基础上推导出来的,本质是状态反馈控制器,但实际上由于扰动项的存在,尽管A+BF渐近稳定,但车辆在跟踪曲线时系统(9)的状态变量不趋近于零[19]. 为了解决该问题,取
将式(30)代入式(9)进行拉氏变换,计算系统的稳态跟踪误差,使得系统的侧向位置稳态误差e1为零,可得δff[19]为
式中:L为轴距,f3为矩阵F的分量.
横摆角e2稳态误差中不包含δff项,因此δff不影响e2的稳态误差,横摆角的稳态误差[19]为
3. 轨迹上参考点坐标的计算
轨迹跟踪控制器设计需要用到轨迹上参考点的曲率半径和系统(9)当前时刻的状态变量,状态变量的计算需要参考点的位置信息,基于坐标变换和二分法计算轨迹上参考点坐标,如图2所示.
图 2
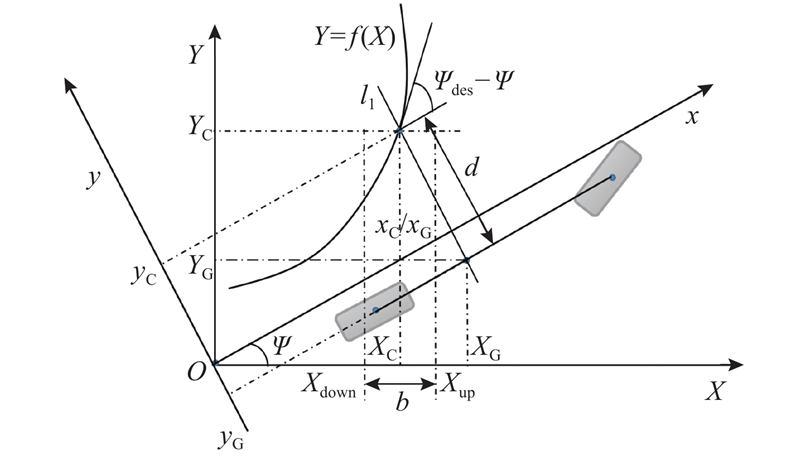
图中,XOY为惯性坐标系,xoy为局部坐标系,(XG,YG)和(XC,YC)为车辆质心和轨迹上参考点在惯性坐标系下的坐标,(xG,yG)和(xC,yC)为车辆质心和轨迹上参考点在局部坐标系下坐标,Y=f(X)为参考轨迹.
作过车辆质心且垂直于汽车前进方向的直线l1为
记上一采样时刻汽车质心到轨迹上参考点的距离为dt-1,当采样时间较小时,2个采样间隔内汽车质心到参考点的距离d变化不大.
当车辆质心在曲线的上面时(即Y=f(XG)<YG),
当车辆质心在曲线的下面时(即Y=f(XG)>YG),
联立式(34)、(35),可得
以式(36)计算出的起始点的横坐标作为中心点,并以一定的带宽作为进行二分法计算的初始区间,计算直线l1与曲线Y=f(X)的交点,直至达到指定迭代次数或者迭代精度,初始区间为
式中:b为初始区间的带宽,Xup和Xdown分别为初始区间的上限和下限.
将汽车质心纵坐标YG和参考点纵坐标YC转换到相对坐标系下,可得
于是,当前时刻汽车质心到参考点的距离dt为
4. 仿真及结果分析
4.1. 不同控制器性能比较
为了验证设计控制器的控制效果,在相同的仿真环境下,对比设计的轨迹跟踪控制器(简称LMI控制器)、Carsim中自带的预瞄时间为0.6 s的预瞄驾驶员模型(PDM)控制器和MPC控制器. 仿真中,车速为80 km/h,路面附着系数为0.8,所使用的MPC控制器参考文献[9].
仿真结果如图3所示. 图3(a)、(b)给出3种控制器作用下车辆的轨迹跟踪仿真结果. LMI控制时,车辆行驶轨迹与期望值的偏差最大值为0.85 m,轨迹跟踪误差的均方根值(RMS)为0.25 m;横摆角偏差最大为5.19°,偏差的RMS为1.61°;MPC控制时,车辆行驶轨迹与期望值的偏差最大值为0.90 m,轨迹跟踪误差的RMS为0.30 m;横摆角偏差最大为6.33°,偏差的RMS为1.82°;PDM控制时,车辆行驶轨迹与期望值的偏差最大值为1.47 m,轨迹跟踪误差的RMS为0.47 m;横摆角的偏差最大值为10.54°,偏差的RMS为3.46°. 可以看出,LMI控制器的轨迹跟踪精度优于MPC和PDM控制器. 如图3(c)所示为不同控制器作用下的前轮转角,LMI控制器的输出前轮转角较大,且超过15°,这是因为在反馈控制器输出的基础上加了前馈控制器输出. 如图3(d)所示为不同控制器作用下的车辆质心侧偏角,3种控制器作用下车辆的质心侧偏角最大值均小于极限范围8.91°,在稳定性范围内[24],说明3种控制器在较好地跟踪期望轨迹的同时保持车辆的稳定性. 综上分析可知,LMI控制器在轨迹跟踪精度上优于MPC和PDM控制器,并且在较好地跟踪期望轨迹的同时保持车辆的稳定性;与MPC控制器相比,LMI控制器输入成本增加,稳定性略有下降,这是因为LMI控制器仅利用了道路当前信息,MPC控制器利用未来一段道路信息,可以滤掉道路中的高频成分,使得控制量变化比较平缓,车辆姿态变化平稳,质心侧偏角较小.
图 3
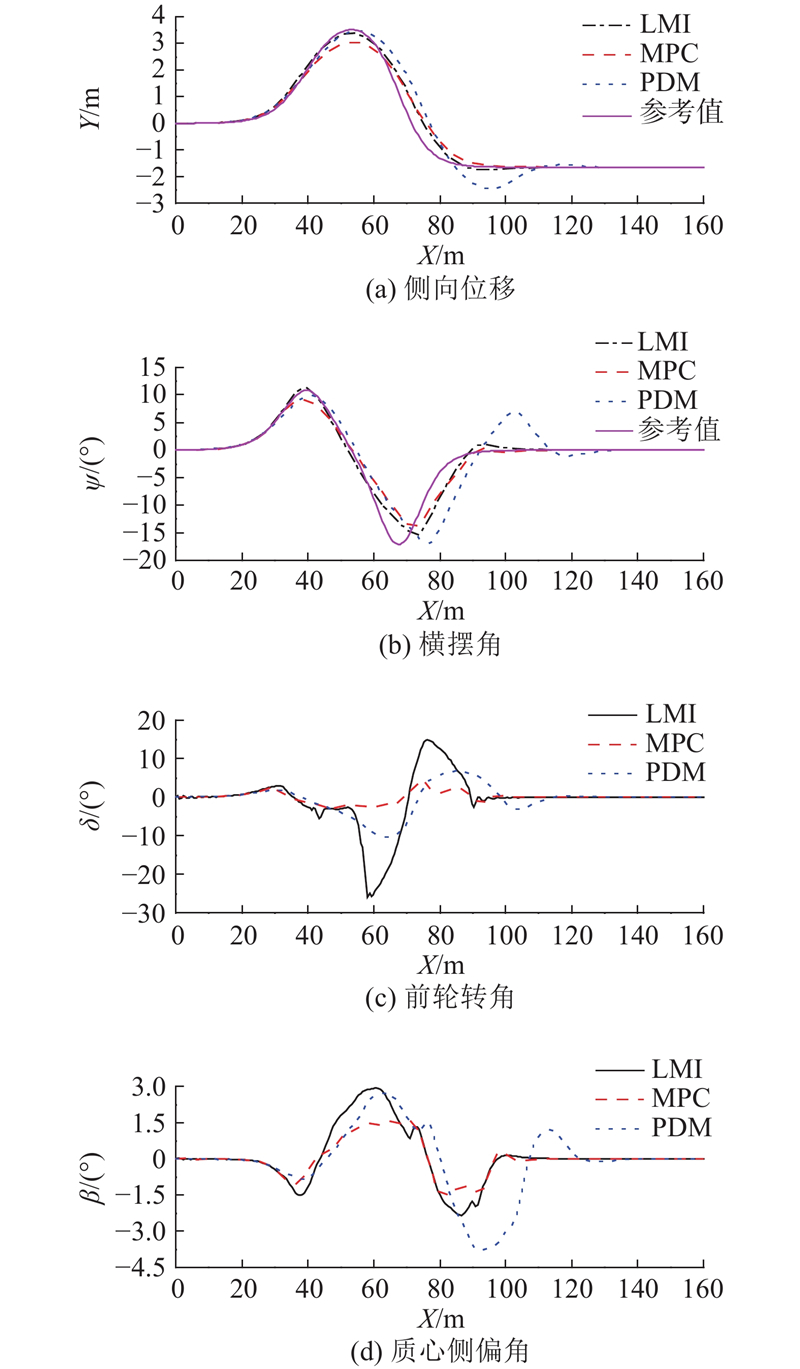
图 3 不同控制器的轨迹跟踪仿真结果
Fig.3 Trajectory tracking simulation results of different controllers
4.2. 控制器对速度鲁棒性
在不同的速度下,以相同的控制器参数对智能车进行轨迹跟踪控制,分析控制器对速度的鲁棒性. 仿真车速为70、80、90 km/h,路面附着系数为0.8.
图 4
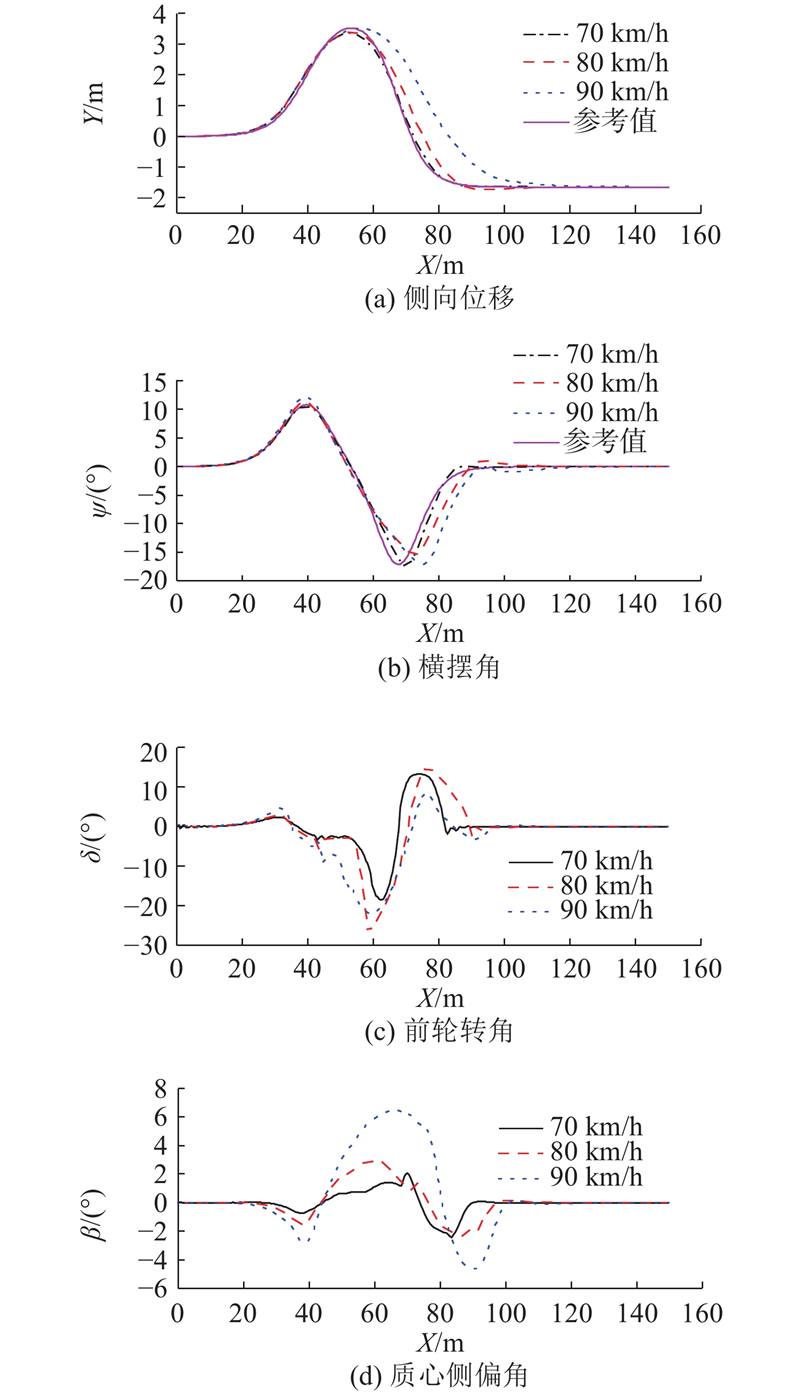
图 4 不同速度下的轨迹跟踪仿真结果
Fig.4 Trajectory tracking simulation results at different speeds
4.3. 控制器对路面附着系数的鲁棒性
在不同的路面附着系数下,以相同的车速和控制器参数对智能车进行轨迹跟踪控制,验证控制器对路面附着系数的鲁棒性. 仿真时,路面附着系数为0.8、0.6、0.4,车速为70 km/h.
图 5
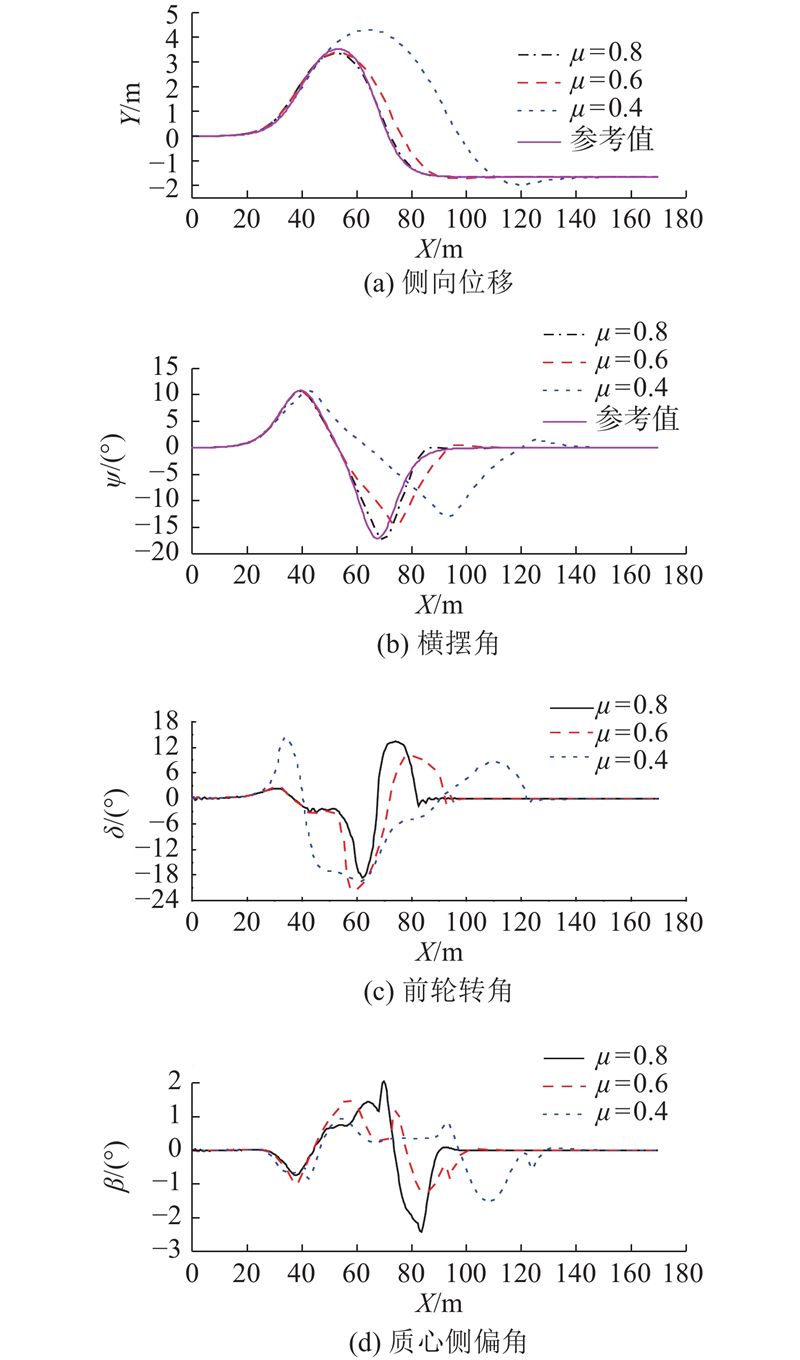
图 5 不同路面附着系数下的轨迹跟踪仿真结果
Fig.5 Trajectory tracking simulation results of different road surface adhesion coefficients
5. 结 语
本文将车辆侧向动力学状态空间模型进行坐标变换,得到基于跟踪误差的车辆侧向动力学状态空间模型;考虑轮胎的非线性特性,建立车辆侧向动力学的多胞型模型. 基于LMI设计反馈控制器,在控制器中引入前馈控制量,以消除侧向位置稳态误差;基于坐标变换和二分法计算参考点位置,与传统的MPC和PDM进行对比. 通过Carsim与Matlab/Simulink联合仿真,验证了本文提出的轨迹跟踪控制器的有效性. 仿真结果表明,该控制器在保证车辆稳定性的基础上具有较高的跟踪精度,对车速和路面附着系数具有较强的鲁棒性,在给定工况下的轨迹跟踪精度优于MPC和PDM控制器.
参考文献
ACT-R cognitive model based trajectory planning method study for electric vehicle's active obstacle avoidance system
[J].
智慧城市的智能汽车
[J].
Smart vehicle for smart city
[J].
Scanning advanced automobile technology
[J].DOI:10.1109/JPROC.2006.888380 [本文引用: 1]
Application of an optimal preview control for simulation of closed-loop automobile driving
[J].DOI:10.1109/TSMC.1981.4308705 [本文引用: 1]
Modelling of driver/vehicle directional control system
[J].
基于趋近律滑模控制的智能车辆轨迹跟踪研究
[J].DOI:10.6041/j.issn.1000-1298.2018.03.048 [本文引用: 1]
Sliding mode control for intelligent vehicle trajectory tracking based on reaching law
[J].DOI:10.6041/j.issn.1000-1298.2018.03.048 [本文引用: 1]
Comparison of linear and nonlinear controllers for active steering of vehicles in evasive manoeuvres
[J].
Predictive active steering control for autonomous vehicle systems
[J].
Improved LTVMPC design for steering control of autonomous vehicle
[J].
Automatic steering control strategy for unmanned vehicles based on robust backstepping sliding mode control theory
[J].DOI:10.1109/ACCESS.2019.2917507 [本文引用: 1]
Robust gain-scheduling automatic steering control of unmanned ground vehicles under velocity-varying motion
[J].DOI:10.1080/00423114.2018.1475677 [本文引用: 1]
Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness
[J].DOI:10.1109/TIE.2016.2531021 [本文引用: 1]
基于滑模自抗扰的智能车路径跟踪控制
[J].
Intelligent vehicle path following control based on sliding mode active disturbance rejection control
[J].
A curving ACC system with coordination control of longitudinal car-following and lateral stability
[J].DOI:10.1080/00423114.2012.656654 [本文引用: 2]
Self-scheduled H-infinity control of linear parameter-varying systems: a design example
[J].DOI:10.1016/0005-1098(95)00038-X [本文引用: 1]
Robust constrained model predictive control using linear matrix inequalities
[J].DOI:10.1016/0005-1098(96)00063-5 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}