

电机噪声可分为结构噪声和空气动力噪声. 电磁噪声属于结构噪声,是电机噪声的主要来源. 电磁噪声主要由径向电磁力波产生,准确计算电磁力波对分析预测和抑制电磁噪声至关重要. 近年来,众多国内外学者针对此问题进行了研究. Cassat等[7-12]介绍二维径向力波分解方法,并比较不同径向力谐波的大小,找出影响电机振动噪声的主要电磁力波分量,达到预测电磁噪声的目的. 杨浩东等[13-14]研究不同极槽配合对电机振动噪声的影响,指出相对于9槽6极的永磁同步电机,12槽10极电机的转矩脉动较小,但其径向力分布非对称,噪声性能较差. 李晓华等[15-16]建立多物理场永磁同步电机振动噪声分析模型,计算其宽调速范围下的振动噪声频谱特性,结果表明0阶力波是电机电磁噪声的主要来源. Jean等[17-18]基于MANATEE软件提出半解析的电磁噪声计算方法,利用该方法可以对电机噪声进行快速预测和评估.
斜槽和斜极可以有效降低齿谐波,对电机的电磁振动噪声有较好的抑制作用[19-21]. 对永磁同步电机而言,常采用转子分段斜极方法. 相比于传统的斜槽斜极方法,转子分段斜极工艺简单、方便磁极装配,能有效抑制电磁噪声,另外磁钢分段可以有效减小涡流损耗、降低磁钢温度、提高永磁体的抗去磁能力[22]. 如何兼顾电磁、热与制造工艺,确定合适的分段数和斜极角度是值得讨论的问题. Han等[23]研究不同斜槽斜极角度对电机反电动势、齿槽转矩以及振动噪声的影响,得到最佳斜槽斜极角度,并通过样机试验进行验证. Blum等[24]以永磁同步电机为例,通过解析法和仿真分析研究斜极的不同拓扑结构对电机振动噪声的影响,指出最佳的斜极方式取决于电磁力波的谐波特性.
本研究就分段斜极的径向力波表达式进行解析推导,揭示转子分段斜极降低电机噪声的机理,研究斜极分段数与所削弱的齿谐波阶数之间的关系;基于解析法和MANATEE软件,以48槽8极车用永磁同步电机为研究对象,分析不同斜极分段数对电磁噪声的影响;将仿真结果与样机测试数据进行对比,以验证研究结果的正确性.
1. 径向电磁力波和电磁噪声的解析计算
1.1. 转子分段斜极径向电磁力波的解析计算
忽略气隙磁通密度的切向分量,根据麦克斯韦张量法,将定、转子谐波磁场产生的径向电磁力波表示为
式中:
由式(1)可知,径向电磁力波分量主要由3部分组成,第1项和第3项分别由定、转子磁场各自单独作用产生,第2项由定、转子磁场共同作用产生. 由于
假定转子轴向分段数n为奇数,斜极角为
式中:
为了简化分析,忽略斜极对气隙磁导的影响,将单位面积上的气隙磁导函数[7]表示为
式中:
将定、转子气隙磁动势表达式(式(2)、(3))分别与气隙磁导表达式(式(4))相乘得到转子分段斜极后的定、转子磁通密度表达式:
转子分段斜极后径向电磁力波的平均值可由每一段的电磁力波迭加求平均得到,根据式(1)、(5)、(6),可以得到转子分段斜极后的径向电磁力波平均值:
式中:
表 1 径向电磁力波的特征参数
Tab.1
| 分类 | r | ωr | Pr |
| 1 | (ν±μ)p | ω1±ωμ | FνΛ0FμΛ0(2μ0) |
| 2 | (ν±μ)p±kZ | ω1±ωμ | FνΛ0FμΛk(4μ0) |
| 3 | (ν±μ)p±kZ | ω1±ωμ | FνΛkFμΛ0(4μ0) |
| 4 | (ν±μ)p±2kZ | ω1±ωμ | FνΛ0FμΛk(8μ0) |
永磁同步电机的电磁力波阶数与极槽配合密切相关,基于表1可推导出定、转子磁场相互作用产生的电磁力波的主要频率分量及谐波来源,48槽8极电机主要的低阶力波阶次为0阶和8阶. 如表2、3所示为低阶径向电磁力波的来源. 表中,斜杠前后数字分别为转子、定子谐波阶次,f为基波频率,fr为径向电磁力谐波频率. 可以看出,定转子磁场相互作用时产生的0阶电磁力波的主要分量为6 f、12 f、18 f、24 f;由齿谐波产生的8阶力波主要分量为10 f、14 f、22 f、26 f. 0阶6 f、18 f分量主要由纹波磁场产生;0阶12 f分量和8阶10 f、14 f分量主要来源于基波磁场和一阶齿谐波磁场;0阶24 f和8阶22 f、26 f主要来源于基波磁场和二阶齿谐波磁场.
表 2 48槽8极电机的0阶电磁力波的主要谐波来源
Tab.2
| 分类 | fr | |||
| 6f | 12f | 18f | 24f | |
| 1 | 5/−5, 7/7 | 11/−11, 13/13 | 17/−17, 19/19 | 23/−23, 25/25 |
| 2 | 5/7, 5/−17 | 11/1, 11/−23 | 17/−5, 17/−29 | 23/−11 |
| 3 | 7/−5, 7/19 | 13/1, 13/25 | 19/7 | 25/13 |
| 4 | 5/19, 7/−17 | 11/13, 13/−11 | 17/7, 19/−5 | 23/1, 25/1 |
表 3 48槽8极电机的8阶电磁力波的主要谐波来源
Tab.3
| 分类 | fr1) | |||
| 10f | 14f | 22f | 26f | |
| 1)注:仅列出与齿谐波相关的径向电磁力谐波来源 | ||||
| 1 | 9/−11, 11/13 | 13/−11, 15/13 | 21/−23, 23/25 | 25/−27, 27/25 |
| 2 | − | 13/1 | − | − |
| 3 | 11/1, 11/25 | 15/25 | 23/13 | 27/17 |
| 4 | 9/13, 11/−11 | 13/13, 15/−11 | 21/1 | 25/1 |
1.2. 斜极降低电机电磁噪声机理分析
假设系统为线性,则定子表面静变形的表达式为
式中:S为定子表面积,k、m分别为刚度和质量,下标c、f分别为铁芯和机壳.
定子表面静变形与电机刚度和质量有关,当径向力波频率fr与固有频率fm相同或相近时还会发生共振,引起铁芯形变量变大. 考虑阻尼系数δ的影响,可将实际定子表面振动幅值[26]表示为
由于平面辐射时的声压与定子表面振动幅值成正比,可以得到分段斜极前后声压级的变化:
由式(9)~(11)可知,定子表面振动幅值与电磁力波成正比;电机斜极后的声压级与斜极系数的对数成正比. 在电机设计时合理选择分段斜极方案以及电机的刚度、质量和阻尼的参数匹配,可以有效降低电机振动幅值和电磁噪声.
1.3. 不同分段数对齿谐波的削弱作用
转子分段斜极可以有效削弱齿谐波,且削弱的齿谐波阶数与分段数密切相关. 转子磁场谐波次数与齿谐波阶数i的关系为
式中:LCM为最小公倍数函数.
为了达到削弱某阶齿谐波的目的,由式(8)可以得出最佳斜极电角度
结合式(8)、(13),并令i/n=t,可以得到:
由以上分析可知:当齿谐波阶次为分段数的整数倍时,转子斜极无法削弱该阶齿谐波;当为非整数倍时,该阶次的齿谐波可得到有效抑制.
2. 基于MANATEE软件的电磁噪声仿真分析
应用MANATEE软件对48槽8极样机进行仿真分析. 本样机转子分2段移位斜极,斜极机械角度为3.75°. 主要结构参数技术指标如表4所示.
表 4 样机的技术参数
Tab.4
| 参数 | 数值 |
| 定子槽数 | 48 |
| 极数 | 8 |
| 最大转速/(r·min−1) | 9 500 |
| 额定转速/(r·min−1) | 4 000 |
| 最大扭矩/(N·m) | 200 |
| 机壳外径/mm | 270 |
| 电机轴向长度/mm | 105 |
| 转子分段数 | 2 |
| 转子斜极角度/(°) | 3.75 |
2.1. 样机径向电磁力波的仿真分析
图 1
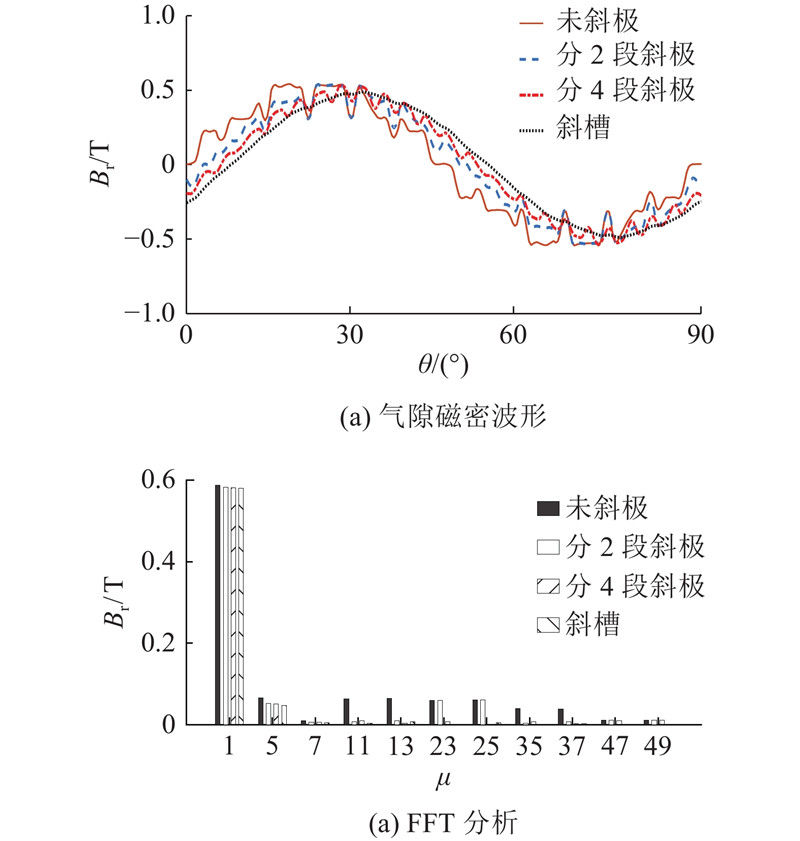
图 1 不同分段数下的空载气隙磁通密度仿真结果
Fig.1 No-load air gap magnetic density simulation results in different segment numbers
图 2
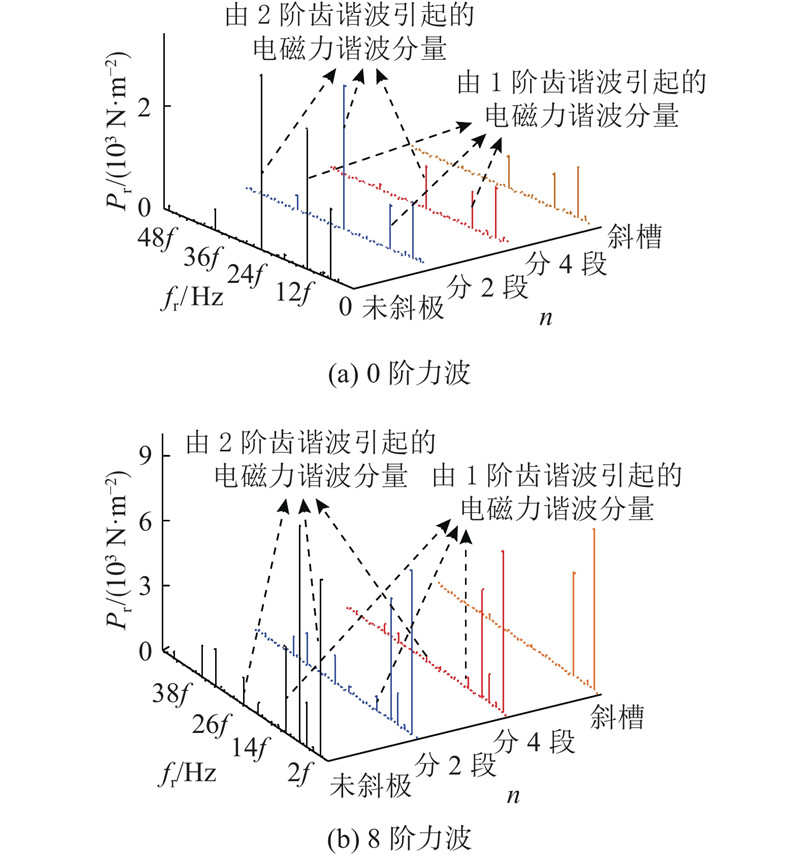
图 2 不同分段数下的径向电磁力谐波分析
Fig.2 Harmonic analysis of radial electromagnetic force in different segment numbers
由图1可知,转子分段斜极后的齿谐波显著减小,且随着转子分段数的增加,气隙磁通密度波形逐渐接近斜槽的气隙磁通密度波形. 对于LCM (Z,2p)/p=12的电机,1阶、2阶齿谐波占比较大. 由图2可知,在转子分2段斜极后,可大幅度抑制1阶齿谐波,12f处的径向力谐波由2 716.0 N/m2降低到865.1 N/m2,削弱了68.1%,14 f处的径向力谐波降低了82.8%;对2阶齿谐波影响不大,24 f、26 f处的电磁力谐波仅降低17.8%、3.7%,仍存在较高幅值. 在分4段斜极后,1阶、2阶齿谐波均得到削弱,0阶12f、24f处的径向电磁力谐波分别降低73.6%、75.5%,8阶14f、26f处的径向电磁力谐波也明显降低. 由于0阶6f和8阶4f、8f分量主要来源于纹波磁场,故斜极后的谐波幅值变化不大. 仿真结果进一步验证了分段数与被削弱齿谐波阶次之间的关系. 图1、2的仿真结果表明,转子分4段斜极的气隙磁通密度和电磁力波波形已与斜槽波形相似. 过多的分段数会增加转子制造工艺的难度,且轴向漏磁也会有所增加,因此,合理选择分段数十分关键.
2.2. 样机电磁噪声分析
电机振动噪声与径向电磁力的谐波幅值有关,另外,还应考虑到电机结构特性对电机噪声性能的影响. 当电机的电磁力波频率与相同阶次的模态固有频率相同或相近时,即使该电磁力谐波分量的幅值较小,也会引起较大的振动噪声,在设计时应尽量避免. 如图3所示为该样机的声压频谱图. 图中,n0为电机转速;白色竖虚线对应电机的固有频率;括号(M,N)中的M、N分别表示固有模态的径向阶次和轴向阶次;以颜色区分电磁噪声的大小,并标出了幅值较高的电磁噪声频带.
图 3
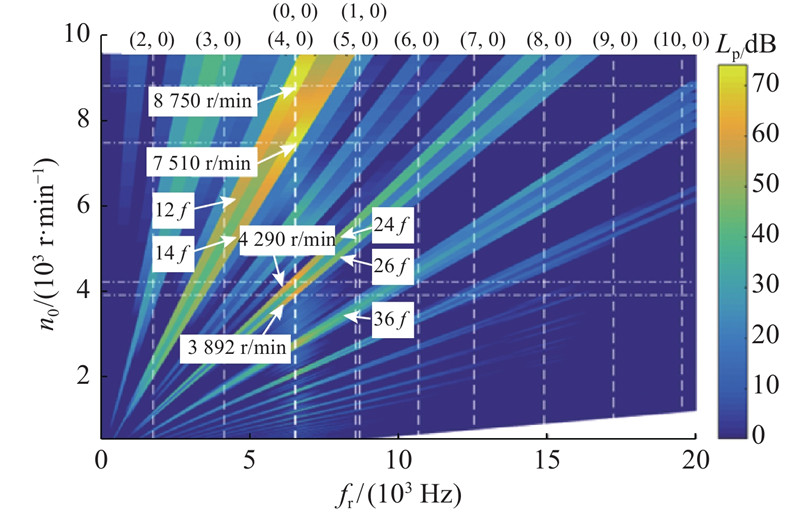
图 3 全转速下的A计权声压频谱图
Fig.3 A-weighted sound pressure level sonagram at full speed conditions
样机的0阶、8阶模态的固有频率分别为6 539、14 884 Hz. 如图3所示,0阶力波中12f、24f处电磁力波分量与0阶固有频率交点处的转速分别为8 750、4 209 r/min,满足共振条件. 由式(10)可知,定子表面的振动幅值不仅与固有频率有关,还与样机的刚度、质量和阻尼有关,由于该样机设计合理,未发生剧烈的共振效应. 8阶力波中14f、26f处的电磁力波在7 510、3 892 r/min处的电磁噪声较大,这主要是由于其对应的电磁力波幅值较大,可见在电机设计时,削弱电磁力的谐波分量十分重要.
如图4所示为不同转子斜极分段数下的全转速A计权声压级Lp曲线. 可以看出,斜极后的电机声压级整体下降,噪声性能得到有效改善. 在7 510、8 750 r/min处的噪声主要是由14f、12f分量引起的,主要来源于基波磁场和1阶齿谐波磁场,所以转子分2段和分4段斜极均可降低这2点处噪声;3 892、4 209 r/min点处的噪声主要是由26f、24f处的电磁力波分量引起的,主要来源于基波磁场和2阶齿谐波磁场,分2段斜极对这2点噪声影响不大,分4段斜极可明显降低这2点噪声. 该样机综合考虑电磁、机械、噪声、工艺等各种因素后,采用分2段的转子斜极方案. 由仿真结果可知,斜极后的噪声最大值相比于未斜极时,由74.4 dB降低到了67.2 dB.
图 4

图 4 不同斜极分段数下的A计权声压级对比
Fig.4 A-weighted sound level comparison in different segment numbers of step-skewed rotor
3. 样机噪声测试
图 5
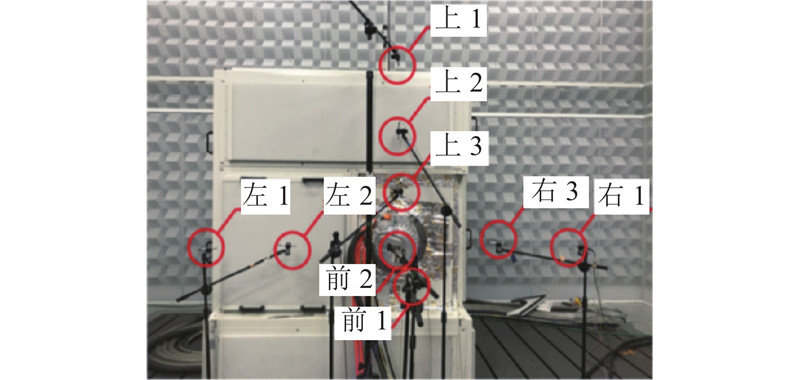
表 5 噪声实测值与仿真结果对比
Tab.5
| n0/(r·min−1) | Lp-test/dB | Lp/dB |
| 2 500 | 55.9 | 53.2 |
| 4 000 | 60.5 | 59.2 |
| 5 500 | 56.6 | 51.2 |
| 7 000 | 63.7 | 58.1 |
| 8 500 | 69.3 | 65.9 |
| 9 500 | 66.7 | 63.3 |
4. 结 语
本研究推导永磁同步电机转子分段斜极后的径向电磁力波解析式,分析斜极降低电磁噪声的机理,并在此基础上研究不同的斜极分段数与所削弱的齿谐波阶次之间的关系. 基于MANATEE软件进行电磁力波与电磁噪声的仿真分析,结果表明:当齿谐波阶次为分段数的整数倍时,转子斜极无法削弱该阶齿谐波;当为非整数倍时,该阶次的齿谐波可得到有效抑制.
48槽8极电机的主要电磁力波阶次为0阶、8阶,在设计中应合理选择斜极分段数和斜极角以及电机的质量、刚度和阻尼的参数匹配,以最大程度地优化噪声性能. 由仿真结果可知,样机采用转子分2段斜极后,全转速下的噪声最大值相比于未斜极时,由74.4 dB降低到了67.2 dB. 样机实测结果验证了以上结论,为电机噪声的预测评估及优化提供了理论基础和研究分析方法.
转子分段移位斜极可有效抑制电机电磁噪声. 但是,当转子分段数确定后,磁钢排列方式不合理也有可能会引起不平衡的电磁轴向力,产生轴向窜动与扭振. 采用沿轴向磁极反对称的V型转子结构既能抑制永磁同步电机的齿谐波磁场,同时还能有效削弱不平衡的电磁轴向力.
参考文献
Comparison of interior and surface PM machines equipped with fractional-slot concentrated windings for hybrid traction applications
[J].DOI:10.1109/TEC.2012.2195316 [本文引用: 1]
Noise and vibration levels of modern electric motors
[J].
Influence of pole and slot combinations on magnetic forces and vibration in low-speed PM wind generators
[J].
Unbalanced magnetic pull due to asymmetry and low-level static rotor eccentricity in fractional-slot brushless permanent-magnet motors with surface-magnet and consequent-pole rotors
[J].
A practical solution to mitigate vibrations in industrial PM motors having concentric windings
[J].DOI:10.1109/TIA.2012.2210172 [本文引用: 2]
Method for analyzing vibrations due to electromagnetic force in electric motors
[J].
计及转子斜槽时笼型感应电机电磁振动变化规律的研究
[J].
Study on the variation laws of electromagnetic vibration considered the skewed rotor in a squirrel-cage induction motor
[J].
电动汽车用永磁同步电机振动噪声的计算与分析
[J].DOI:10.3969/j.issn.1007-449X.2013.08.006
Calculation and analysis of vehicle vibration and noise of permanent magnet synchronous motor applied in electric vehicle
[J].DOI:10.3969/j.issn.1007-449X.2013.08.006
Influence of radial force harmonics with low mode number on electromagnetic vibration of PMSM
[J].
分数槽永磁同步电机电磁振动的分析与抑制
[J].
Electromagnetic vibration analysis and suppression of permanent magnet synchronous motor with fractional slot combination
[J].
电动汽车IPMSM宽范围调速振动噪声源分析
[J].
Vibration and noise sources analysis of IPMSM for electric vehicles in a wide-speed range
[J].
A multiphysics optimization approach to design low noise and light weight electric powertrain noise, vibration and harshness (NVH) prediction of electric powertrain using finite element analysis (FEA) and optimization
[J].
Fast prediction of variable-speed acoustic noise due to magnetic forces in electrical machines
[J].
永磁同步电机电磁振动数值预测与分析
[J].
Numerical prediction and analysis of electromagnetic vibration in permanent magnet synchronous motor
[J].
笼型感应电机转子斜槽研究综述及展望
[J].DOI:10.3969/j.issn.1000-6753.2016.06.001 [本文引用: 1]
Review and prospect of skewed rotor in squirrel cage induction machines
[J].DOI:10.3969/j.issn.1000-6753.2016.06.001 [本文引用: 1]
Experimental verification and effects of step skewed rotor type IPMSM on vibration and noise
[J].DOI:10.1109/TMAG.2011.2150739 [本文引用: 1]
永磁同步电机永磁体分块对涡流损耗的影响分析
[J].
Impact analysis of permanent magnet segments on eddy current loss in permanent magnet synchronous motor
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}