

本研究综述了目前常用的振动能量采集技术,并通过测量行走及跑步时人体肘部、脚踝等关节部位的加速度和角速度验证人体动能俘获的可行性. 根据已知的人体各部位的运动频率范围,设计用于采集人体动能的磁极互斥式电磁俘能装置. 通过有限元仿真对互斥磁极的磁场分布进行研究,并通过实验验证将其佩戴在人体关节上进行运动能量采集时的电压和功率的输出特性.
1. 振动能量采集技术
能量采集技术(energy harvesting technology)可定义为将外界环境中的机械能转换为可用电能的过程. 目前较为常见的一种转换形式是将环境中的微弱振动能转换为电能,并将电能进行储存和利用. 振动能-电能转换机制大致可分为3类:电磁式、静电式和压电式.
1.1. 电磁式能量采集
1.2. 静电式能量采集
静电式能量采集技术通过改变可变电容的板间距来实现能量间转换. 静电式转换装置的基本组成包括2个电容极片和电容间电介质. 当外界机械能带动极片产生相对运动时,电容大小改变造成电容存储的电荷量改变,在回路中产生电荷流动,形成电路,从而达到能量转换的目的. Torres等[9]设计了基于互补金属氧化物半导体(complementary metal oxide semiconductor,CMOS)工艺的静电式俘能装置,在每个俘能周期消耗1.7 nJ的能量可俘获9.7 nJ的电能,其中电容每改变200 pF,平均可得到1.6 μW的功率;Suzuki等[10]提出被动电极间距控制方法,并以此为基础设计微机电系统(micro-electro-mechanical system,MEMS)发电机,在63 Hz振动频率和2g加速度的条件下能够输出0.5 μW功率.
1.3. 压电式能量采集
压电式能量采集技术基于正压电效应,当压电晶体受到外力作用后产生形变,在相应表面产生异种电荷. 近年来压电式俘能技术发展迅速,主要研究方向从单振动方向、单谐振频率向多振动方向、多谐振频率转变[11]. Pasquale等[12]使用压电纤维复合材料(macro-fiber composite,MFC)制作的人体动能收集装置在加速度为0.35g的条件下,最大约能输出5.7 V电压;Snehalika等[13]将聚偏氟乙烯(Polyvinylidene fluoride,PVDF)压电材料嵌入鞋垫中,通过感应行走产生的压力为电池充电,当穿戴者以2 Hz的正常步态行走时可获得的峰峰值电压为4 V;Song等[14]研制了基于压电陶瓷材料的微机电能量采集器,能量密度为4.92×10–2 μW/mm3.
表 1 3种振动能收集技术的优缺点
Tab.1
| 类型 | 优点 | 缺点 |
| 电磁式 | 无需驱动电源 | 磁体与线圈尺寸大 |
| 输出电流大 | 难以与MEMS技术集成 | |
| 体积小、结构简单 | 输出电压低 | |
| 静电式 | 输出电压高 | 需要外部电源 |
| 收集频率广 | 电容气隙小、实现困难 | |
| 易与MEMS技术集成 | 低电流、高输出阻抗 | |
| 压电式 | 机电转换效率高 | 高输出阻抗 |
| 输出电压高 | 存在非线性效应 | |
| 易与MEMS技术集成 | 压电材料较脆、易疲劳 |
2. 人体运动能量采集
人体在消耗能量的同时也在不断向外释放能量,按照能量产生的方式可将人体所提供的能量分为化学能和物理能,目前可以回收利用的人体能量包括:动能、热能和化学能[16]. 根据文献[17],在人体日常活动中,各身体部位产生的动能Ek如表2所示,可回收总能量Ekc可达到数百毫瓦. 目前已有研究者针对人体动能设计了一系列俘能装置. 比如,Berdy等[18]研发了基于磁悬浮结构的人体动能采集器,并对10名实验者进行了测试,结果表明,在走路时(时速4.8 km/h)可俘获的平均功率为71 μW,在跑步时(时速9.6 km/h)可俘获的平均功率为342 μW;Wang等[19]设计的可调式电磁俘能装置的总质量为218.7 g,用于收集下肢摆动所产生的能量,当实验者以8 km/h的速度运动时,装置可俘获的平均功率为10.66 mW.
表 2 人体日常活动产生及可回收能量
Tab.2
| 行为 | Ek/mW | Ekc/mW |
| 呼气 | 1.00×103 | 0.40×103 |
| 血压 | 0.93×103 | 0.37×103 |
| 呼吸胸腔变化 | 0.83×103 | 0.42×103 |
| 手指运动 | 6.9~19.0 | 0.76~2.10 |
| 上肢运动 | 60.00×103 | 0.33×103 |
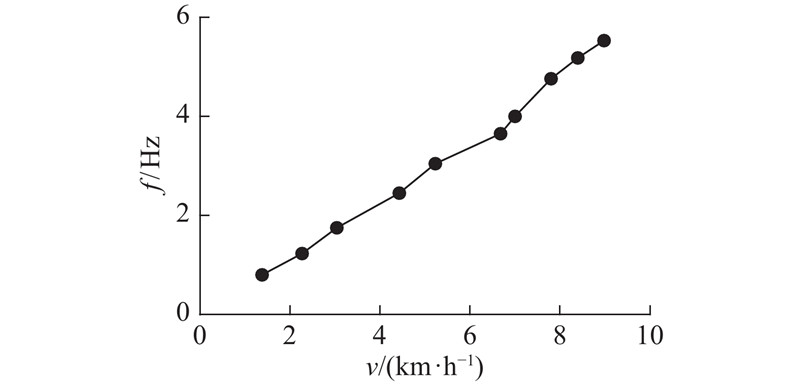
人体在运动时所产生动能的大小主要取决于身体各部位的运动状况,因此有必要对运动时人体各部位的加速度和角速度进行量化. 使用InvenSense公司的MPU9150九轴惯性传感器对实验者在跑步机上行走及奔跑时腕部、肘部、脚踝处的加速度a和角速度ω进行测量(见图1),在不同的行进速度v下,参数的测量平均值折线图如图2所示. 测量数据由于测试者的运动姿态不同会有所波动,但在总体趋势上,随着行进速度的提高,加速度和角速度的测量值随之增加. 当运动速度从5 km/h提高到6 km/h时,测试者的姿态由行走转成奔跑,腕部和肘部的加速度有较大增幅,由图可知,在行走时人体所能产生的最大加速度和最大角速度分别约为5.5g、600°/s,可为电磁能量采集单元提供足够大的驱动,带动其运动. 此外,实验表明四肢摆动的频率f随运动速度的提高而增加(见图3),频率范围一般为1~6 Hz,可针对该频带设计相应的俘能装置,以提高能量采集效率.
图 1
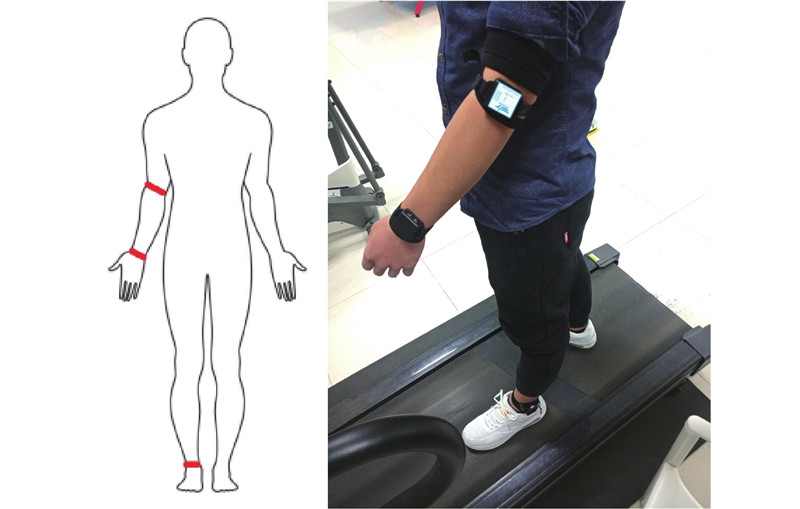
图 2
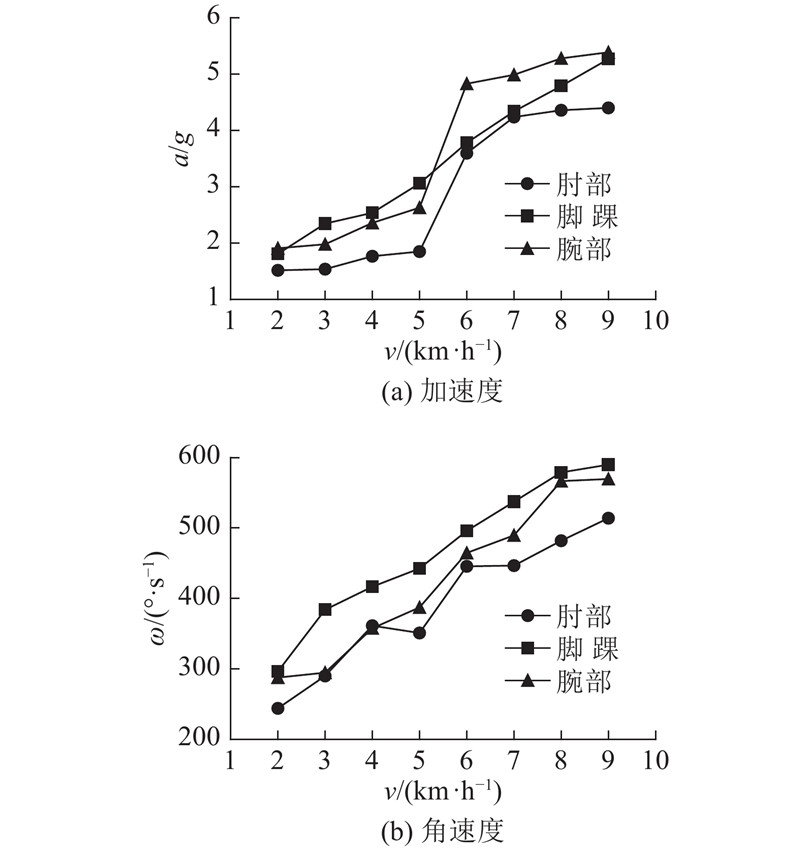
图 2 不同运动速度下人体各部位加速度和角速度
Fig.2 Acceleration and angular velocity of human body parts with different motion speeds
图 3
3. 磁极互斥电磁俘能装置设计
3.1. 装置设计
图 4
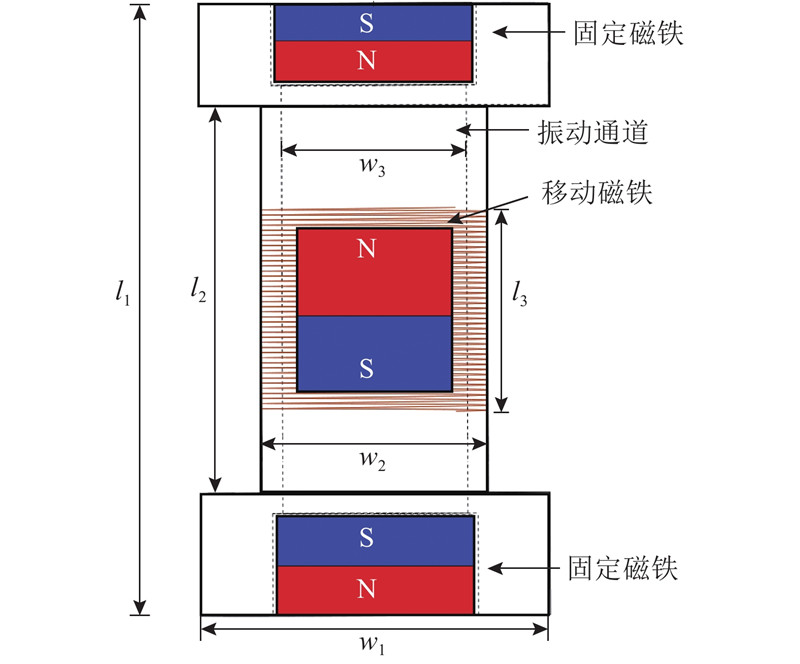
表 3 电磁俘能装置参数
Tab.3
| 参数 | 数值/mm | 参数 | 数值/mm | |
| l1 | 60.0 | w1 | 34.0 | |
| l2 | 38.0 | w2 | 21.7 | |
| l3 | 25.8 | w3 | 18.0 |
3.2. 理论分析
电磁俘能装置是基于法拉第电磁感应定律将外界振动转换成磁铁与线圈之间的相对位移,以此将振动能转换成电能. N匝线圈中的感生电压V为磁链梯度和速度的乘积,表达式为
图 5
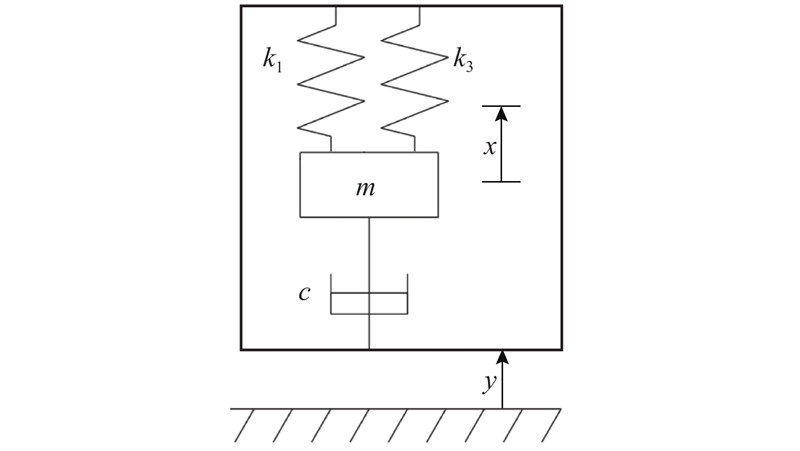
图 5 磁极互斥结构系统等效模型图
Fig.5 Equivalent model diagram of magnetic levitation structure
式中:z=x–y为移动磁铁与基座间的相对位移;m为移动磁铁质量;c为阻尼系数;k1为线性刚度;k3为非线性刚度;g为重力加速度;B为磁感应强度;Lp为线圈有效长度;Lc为线圈电感;I为线圈中电流;R为电阻,包括线圈电阻Rc和负载电阻RL.
式中:α为电磁耦合系数,j为虚部符号.
式中:B为移动磁铁所在位置的磁感应强度,s为移动磁体的位移,Br为剩余磁通密度(N38钕铁硼磁铁的剩余磁通密度为1.22~1.26 T),G为移动磁铁与线圈之间的距离,H、D分别为磁铁高度和直径.
移动磁铁受到的电磁力F和可提供功率P的表达式[24]分别为
3.3. 有限元仿真
图 6
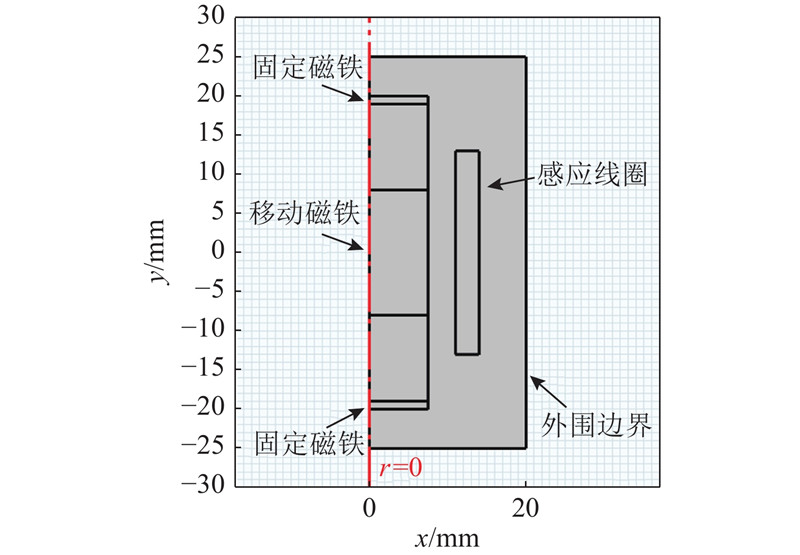
磁场仿真依托磁矢量公式和麦克斯韦方程对磁体所激发磁场及线圈的感生电压进行计算. 在仿真中假设移动磁铁在振动通道内沿中轴线作频率为f的正弦运动,感应线圈均匀缠绕在振动通道外围,忽略重力作用,通过安培定理计算线圈受力. 考虑人体运动所能达到的频率和装置的实际尺寸,在仿真中将激励频率f设置为1~10 Hz,最大位移为17 mm.
图 7
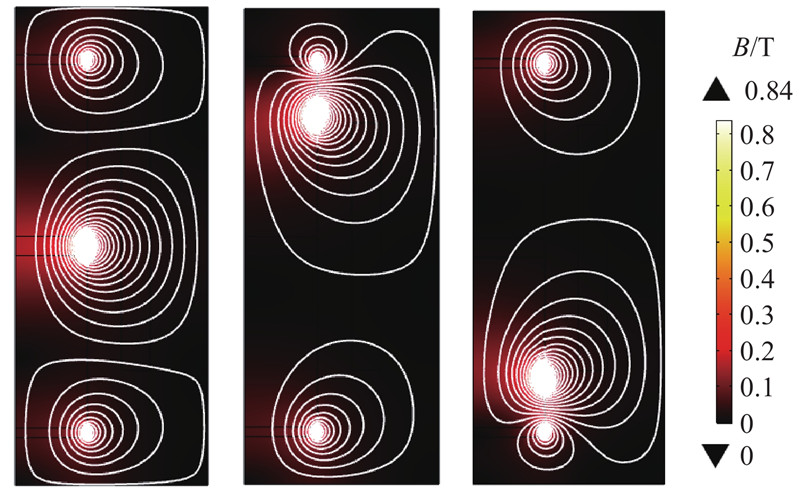
图 7 6 Hz激励频率下磁感应强度/磁感线的半剖面
Fig.7 Half cross section view of magnetic flux density/magnetic induction line with excitation frequency of 6 Hz
图 8
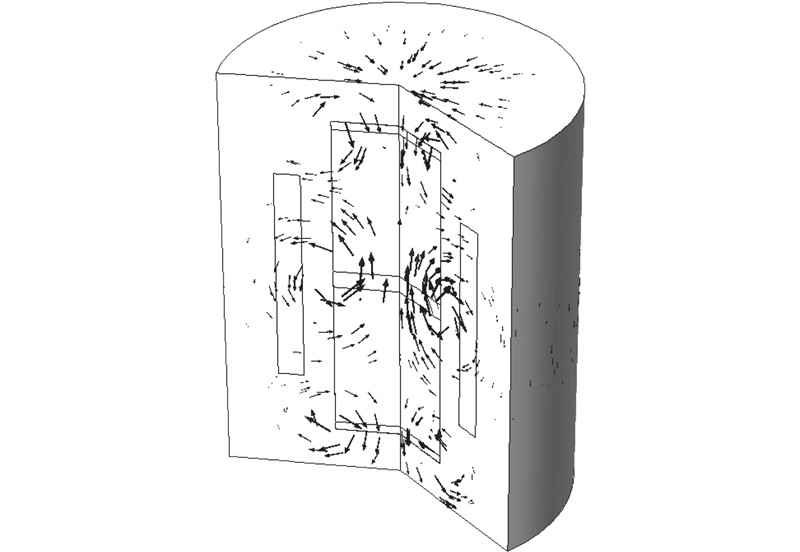
图 8 初始位置处的磁场分布三维图
Fig.8 Three-dimensional diagram of magnetic field distribution in initial position
本研究所设计的磁极互斥结构电磁俘能装置属于动铁式,利用磁铁间的斥力代替弹簧,当移动磁铁在通道内振动时,由磁铁和线圈间的电磁感应效应将磁铁的动能转换为线圈的电能,实现能量间的转换. 虽然在移动磁铁靠近固定磁铁时会损耗一定能量,但该设计避免了传统设计方式中弹簧结构带来的摩擦和损耗,以及材料疲劳引起的结构失效,因此,相比传统的弹簧式结构,磁极互斥结构装置有更长的使用寿命.
4. 实验与分析
4.1. 振动平台能量采集
图 9
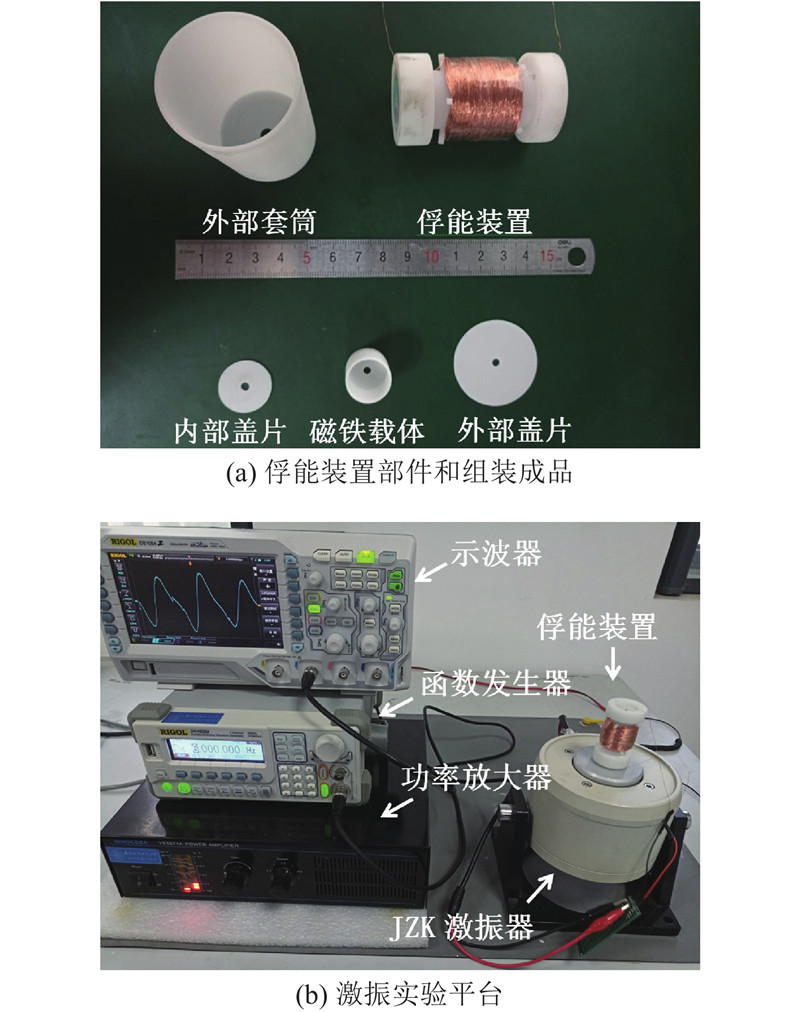
图 9 电磁俘能装置和激振实验平台
Fig.9 Electromagnetic energy harvester and excitation platform
表 4 电磁俘能装置系统参数
Tab.4
| 参数 | 数值 |
| 线圈匝数N/匝 | 1 500 |
| 导线直径d/mm | 0.2 |
| Lp/m | 113.1 |
| Rc/Ω | 67 |
| 磁铁型号 | NdFeB-N38 |
| 固定磁铁尺寸D0×H0/mm | Φ20×1 |
| 固定磁铁质量m0/g | 3.99 |
| D×H/mm | Φ15×2 |
| 移动磁铁质量m/g | 4.07 |
| G/mm | 4.00 |
| 装置总质量M/g | 72.52 |
电磁俘能装置的开路电压Vpp随频率f的变化曲线及在激振台各频率下产生的最大加速度的曲线如图10所示. 可以看出,装置存在2个谐振频率,分别为6、15 Hz,输出开路电压的峰值分别为0.7、2.7 V. 人体肢体的运动频率范围约为0~20 Hz,该俘能装置的有效谐振频率范围均处于人体运动可达的频带内,因此使用该俘能装置可有效采集人体肢体运动的动能. 对装置的谐振频率点进行闭合回路的最优负载测试,输出功率随负载电阻变化的曲线如图11所示. 可以看出,当负载电阻R接近线圈内阻Rc=67 Ω时,输出功率P达到最大,分别为0.21、1.39 mW. 如图12所示,对6 Hz激励频率下感应线圈的开路电压Vc的理论计算结果、数值仿真结果和实验中示波器的显示结果进行比较. 可以看出,理论结果和仿真结果较吻合,实验结果偏小,原因是移动磁铁的装配精度不足,移动磁铁仍会有小角度的偏转,此外实际位移和速度也会受到摩擦力等因素的影响而有所衰减.
图 10
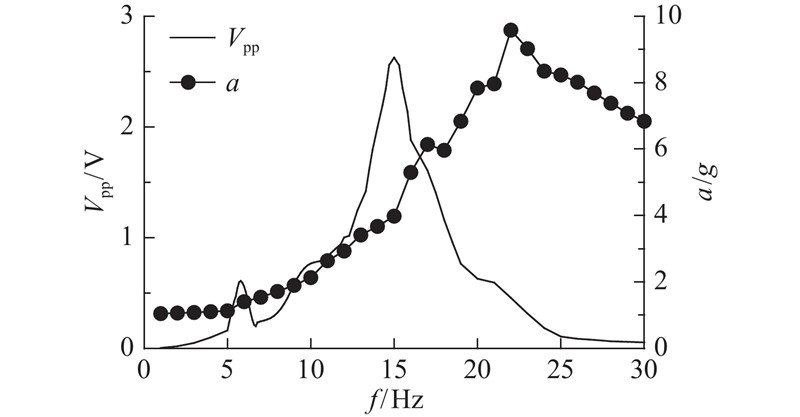
图 10 开路电压峰峰值、激振台加速度随频率的变化曲线
Fig.10 Variation curves of open-circuit peak to peak voltage and acceleration of excitation platform with different frequencies
图 11
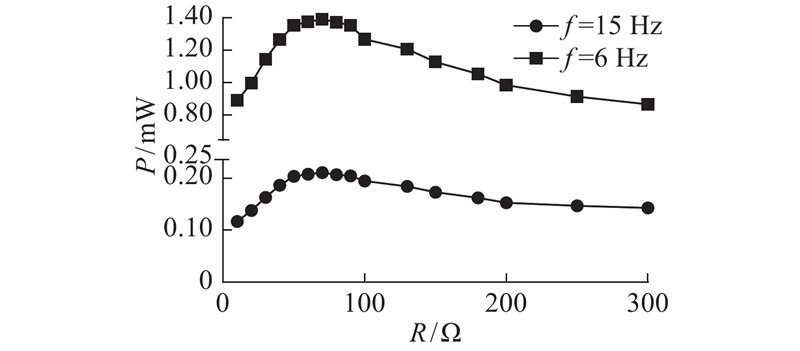
图 11 输出功率随负载电阻的变化曲线
Fig.11 Variation curves of output power with different load resistance values
图 12
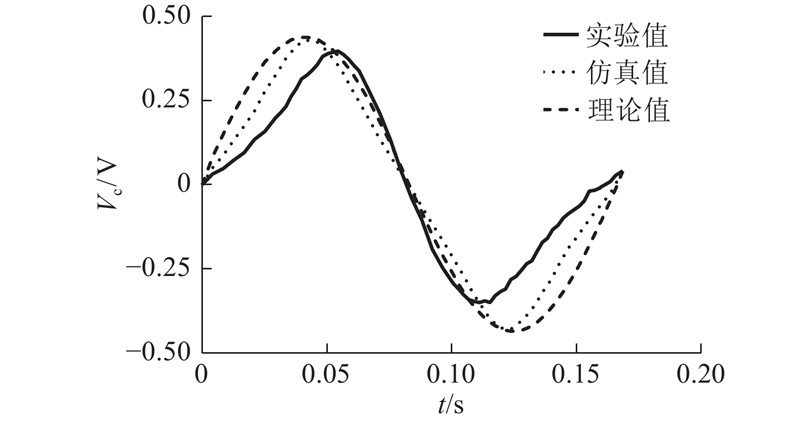
图 12 6 Hz激励频率下开路电压理论、仿真和实验结果比较
Fig.12 Comparison of theoretical, simulation and experimental results of open-circuit voltage with excitation frequency of 6 Hz
4.2. 人体动能实际采集
将该电磁俘能装置分别佩戴在身高为1.7 m、体重为65 kg的实验者的腕部、肘部、脚踝处(见图13),装置中轴线和肢体保持垂直穿戴. 规定实验者以2~9 km/h的速度在跑步机上运动,对其输出特性进行测试. 由图14可知,各部位的开路电压峰值Vpp随着运动速度v的加快而增大,与所测加速度的趋势吻合. 肘部产生的加速度最小,因此其输出电压最小,当运动速度为9 km/h时最大电压为0.33 V,腕部和脚踝产生的开路电压峰值均为0.40 V. 当实验者以8 km/h的速度运动时,腕部、肘部、脚踝处所产生的电压V1、V2、V3的波形如图15所示. 在实验者佩戴俘能装置运动时,当移动磁铁运动方向与肢体摆动方向一致时,能量转换效率最高;当移动磁铁以最大速度在移动通道内与线圈作相对运动时,俘能装置输出的电压最大;当负载电阻RL=70 Ω,实验者的运动速度为8 km/h时,腕部、肘部、脚踝处佩戴的俘能装置的最大瞬时输出功率分别为0.60、0.30、0.58 mW.
图 13

图 14
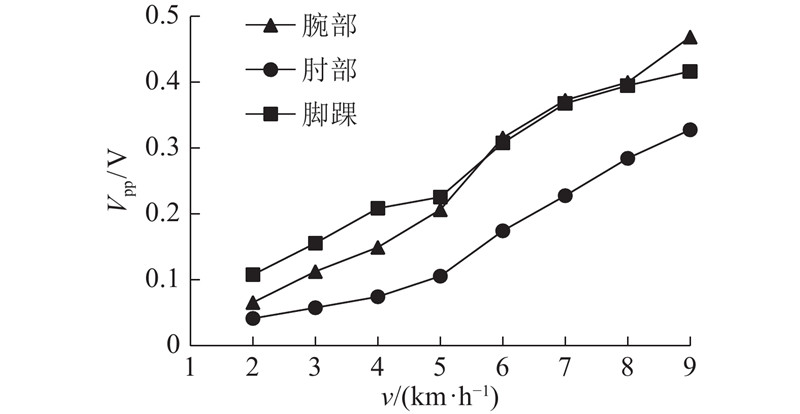
图 14 开路电压峰峰值随运动速度的变化曲线
Fig.14 Variation curves of open-circuit peak to peak voltage with different movement speeds
图 15
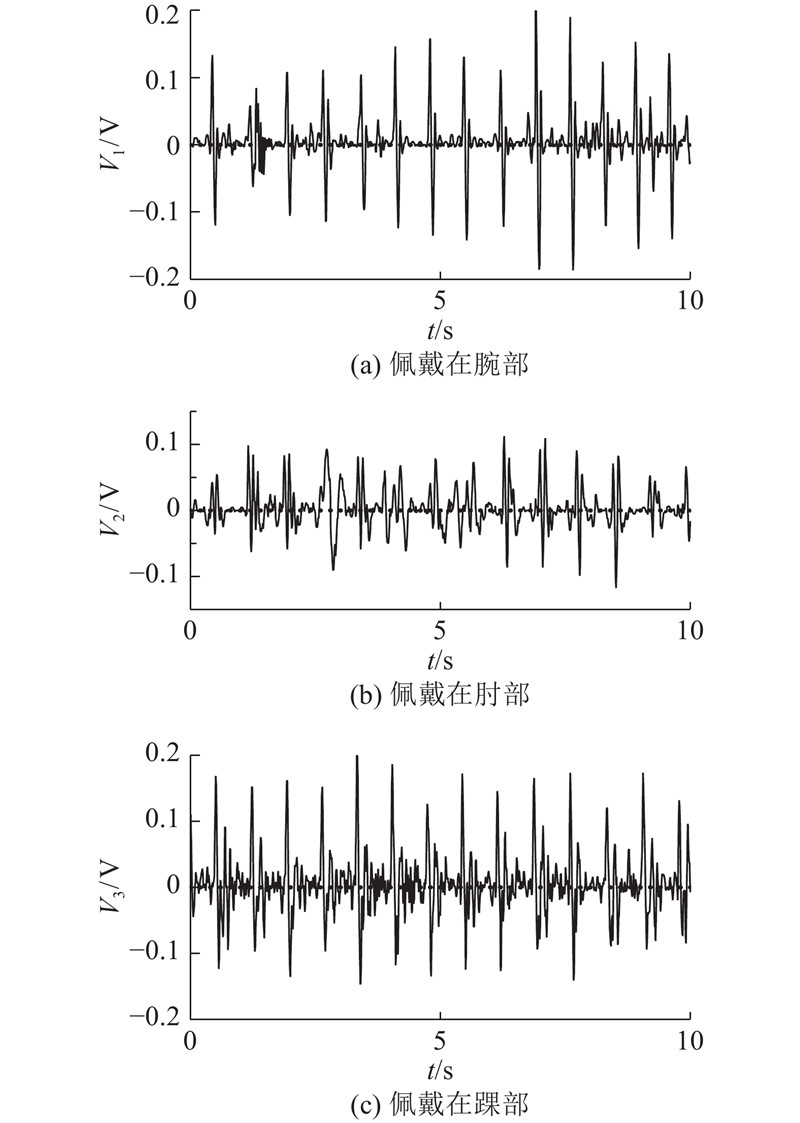
图 15 8 km/h运动速度下腕部、肘部、踝部产生的电压波形
Fig.15 Output voltage waveforms of wrist, elbow and ankle at speed of 8 km/h
5. 结 语
为了回收人体运动时产生的能量,延长可穿戴电子设备的工作时间,设计可用于人体动能回收的磁悬浮结构的电磁俘能装置. 使用MPU9150九轴惯性传感器对实验者在跑步机上运动时,腕部、肘部和踝部所产生的加速度和角速度进行量化,证明俘获人体动能的可行性;设计俘能装置结构,并进行理论分析和建立仿真模型,对装置振动时产生的磁场和感生电压进行分析,验证使用该结构俘获能量的可行性;制作俘能装置并在激振平台对其输出特性进行测试,结果表明,该俘能装置存在6、15 Hz这2个谐振频率,在人体运动的频带范围内具有较大的输出电压,适用于收集人体动能;将装置佩戴在实验者腕部、肘部、脚踝处进行行走测试,当实验者以8 km/h的速度运动时,3个部位所能收集到的最大瞬时功率分别为0.60、0.30、0.58 mW. 实验结果表明,在俘能装置线圈匝数相同的情况下,较高的振动频率和振动幅度可以产生更高的电压和输出功率.在实际应用中人体摆臂以及摆腿动作均存在一定弧度,而本研究所设计的俘能装置的磁铁在线圈中只能作直线往复运动,存在一定程度的动能损耗,后期可以考虑根据佩戴者的摆臂动作,设计更贴近于摆臂以及摆腿轨迹的振动通道,以优化磁铁的运动路径。另外,该俘能装置实时产生的电能相对较小,且输出为交变电压,无法直接为电子设备供电,因此须设计相应的整流和能量管理电路,利用可充电电池或大容量电容,实现自主充放电及稳压输出。
参考文献
A survey on wearable sensor-based systems for health monitoring and prognosis
[J].
A multiharvested self-powered system in a low-voltage low-power technology
[J].DOI:10.1109/TIE.2010.2095395 [本文引用: 1]
环境能量采集技术的研究现状及发展趋势
[J].
Survey on ambient energy harvesting techniques and its development tendency
[J].
人体能量收集的研究现状
[J].
Research status of human energy harvesting
[J].
An electromagnetic micro power generator for wideband environmental vibrations
[J].DOI:10.1016/j.sna.2007.11.021 [本文引用: 1]
A novel high-performance energy harvester based on nonlinear resonance for scavenging power-frequency magnetic energy
[J].DOI:10.1109/TIE.2017.2682040 [本文引用: 1]
Electrostatic energy-harvesting and battery-charging CMOS system prototype
[J].DOI:10.1109/TCSI.2008.2011578 [本文引用: 1]
A MEMS electret generator with electrostatic levitation for vibration-driven energy-harvesting applications
[J].DOI:10.1088/0960-1317/20/10/104002 [本文引用: 1]
压电俘能器研究现状及新发展
[J].
Current situation and new trend of piezoelectric energy harvesters
[J].
Ultra-low resonant piezoelectric MEMS energy harvester with high power density
[J].DOI:10.1109/JMEMS.2017.2728821 [本文引用: 1]
振动能量收集技术的研究现状与发展趋势
[J].DOI:10.3969/j.issn.1672-545X.2013.12.015 [本文引用: 1]
Research and development of vibration energy harvesting technology
[J].DOI:10.3969/j.issn.1672-545X.2013.12.015 [本文引用: 1]
Human powered MEMS-based energy harvest devices
[J].
Human-powered wearable computing
[J].
Kinetic energy harvesting from human walking and running using a magnetic levitation energy harvester
[J].DOI:10.1016/j.sna.2014.12.006 [本文引用: 1]
Magnetic-spring based energy harvesting from human motions: design, modeling and experiments
[J].DOI:10.1016/j.enconman.2016.11.026 [本文引用: 3]
Energy harvesting from the nonlinear oscillations of magnetic levitation
[J].
A new energy harvester using a piezoelectric and suspension electromagnetic mechanism
[J].DOI:10.1631/jzus.A1300210 [本文引用: 1]
Multi-frequency electromagnetic energy harvester using a magnetic spring cantilever
[J].
A wind-flutter energy converter for powering wireless sensors
[J].DOI:10.1016/j.sna.2011.06.015 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}