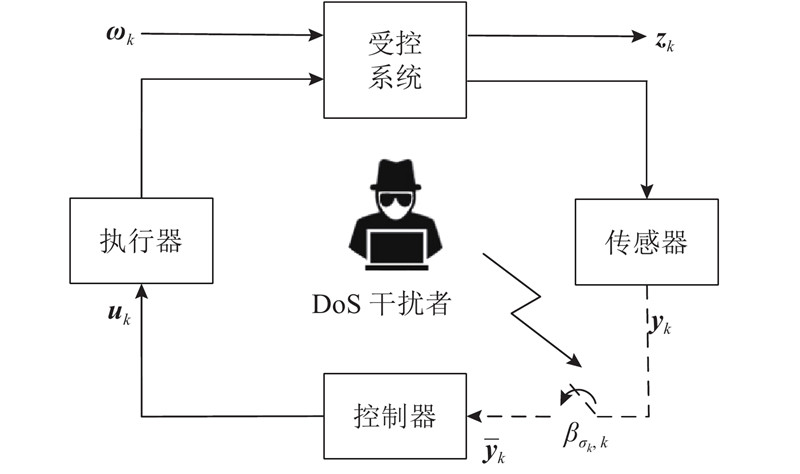
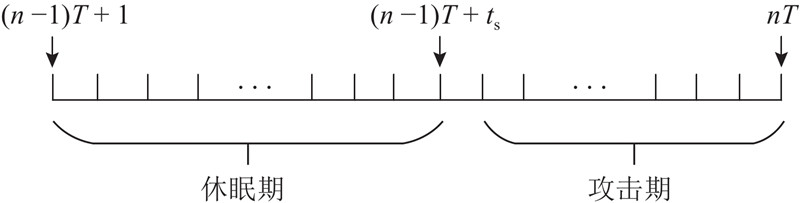
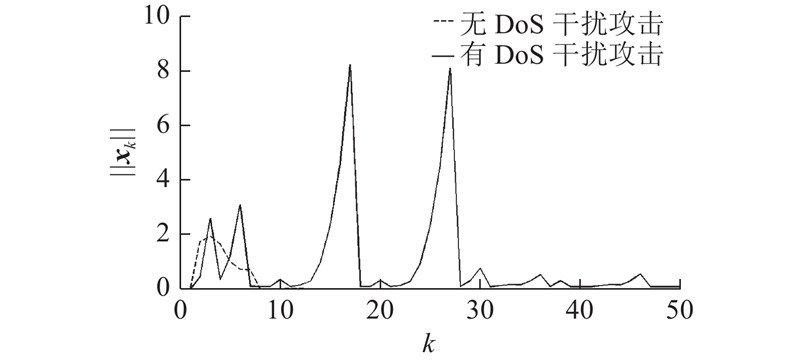
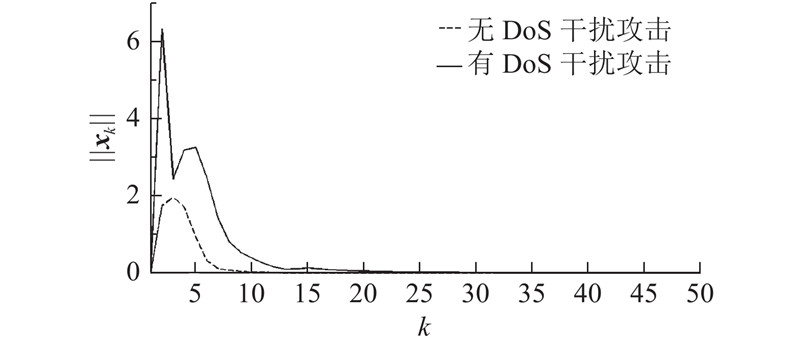
The H∞ control problem of a class of cyber-physical system (CPS) under malicious denial-of-service (DoS) jamming attack was researched, aiming at the influence of the DoS jamming attack on the CPS. An energy constrained DoS jammer with periodic attack strategy attacks the wireless channel in the CPS, decreasing the communication quality. Random packet dropouts caused by inherent factors exist in the wireless channel, and the DoS jammer’s attack strategy is unknown due to that DoS jamming attacks have the characteristics of suddenness and concealment. By expressing the influence of malicious DoS jamming attacks and the inherent factors in the wireless channel into a unified form and establishing an attack tolerance mechanism and an observer-based control strategy, sufficient conditions were obtained to guarantee the exponential mean square stability of the attacked CPS without knowing DoS jammer’s concrete attack strategy, and the prescribed H∞ performance index can be achieved simultaneously. The design of the H∞ controller is transformed into the solving of a convex optimization problem. Numerical simulations were used to demonstrate the correctness and effectiveness of the control strategy.
Keywords:cyber-physical system
;
denial-of-service jamming attack
;
energy constrained
;
periodic attack strategy
;
packet dropout
;
H∞ control
WANG Mu-feng, XU Bu-gong, CHEN Li-ding. H∞ control for cyber-physical system under periodic denial-of-service jamming attack . Journal of Zhejiang University(Engineering Science)[J], 2019, 53(11): 2146-2153 doi:10.3785/j.issn.1008-973X.2019.11.012
目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题.
JAZDI N. Cyber physical system in the context of industry 4.0 [C]// Proceedings of IEEE International Conference on Automation, Quality and Testing, Robotics. Cluj-Napoca: IEEE, 2014: 1−4.
IASIELLO E. Cyber attack: a dull toll to shape foreign policy [C]// Proceedings of the International Conference on Cyber Conflict. Tallinn: IEEE, 2013: 1–18.
PETRENKO A S, PETRENKO S A, MAKOVEICHUK K A, et al. Protection model of PCS of subway from attacks type «wanna cry», «petya» and «bad rabbit» IoT [C]// Proceedings of the IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering. Moscow: IEEE, 2018: 945–949.
TEIXEIRA A, PÉREZ D, SANDBERG H, et al. Attack models and scenarios for networked control systems [C]// Proceedings of the 1st International Conference on High Conference Networked Systems. Beijing: ACM, 2012: 55–64.
CÁRDENAS A A, AMIN S, SASTRY S. Secure control: towards survivable cyber-physical systems [C]// Proceedings of the 28th International Conference on Distributed Computing Systems Workshops. Beijing: IEEE, 2008: 495–500.
LEE P, CLARK A, BUSHNELL L, et al
A passivity framework for modeling and mitigating wormhole attacks on networked control systems
FOROUSH S H, MARTĺNEZ S. On event-triggered control of linear systems under periodic denial of service attacks [C]// Proceedings of the 51st IEEE Annual Conference on Decision and Control. Maui: IEEE, 2012: 2551−2556.
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
0
A passivity framework for modeling and mitigating wormhole attacks on networked control systems
1
2014
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
Optimal denial-of-service attack scheduling with energy constraint
2
2015
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
Optimal DoS attack scheduling in wireless networked control system
1
2016
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
1
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
Input-to-state stabilizing control under denial-of-service
1
2015
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
Multi-channel transmission schedule for remote state estimation under DoS attacks
5
2017
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
SINR-based DoS attack on remote state estimation: a game-theoretic approach
3
2017
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...
Testing and defending methods against DoS attack in state estimation
2
2017
... 目前,引起CPS安全问题的恶意网络攻击主要有拒绝服务(denial-of-service,DoS)攻击、错误数据注入攻击、数据重放攻击和虫洞攻击[12-14],其中DoS攻击作为最常见的攻击方式得到了广泛研究. Zhang等[15]针对某类CPS中远程估计器的估计性能,研究了能量受限的DoS干扰攻击者的最优攻击调度. 文献[16]提出能量受限的周期型DoS攻击模型,研究该种DoS攻击在某类无线网络化控制系统中的最优攻击策略. Foroush等[17]提出具有固定周期的能量受限DoS攻击模型,假设攻击者部分信息已知,实现了DoS攻击下的闭环网络系统稳定. De Persis等[18]提出能量受限的周期性DoS攻击模型,研究在DoS攻击下网络化控制系统的输入-状态稳定,在该模型中可以通过参数设置表示DoS攻击者的能量受限、周期性、随机性等特性. Ding等[19]利用信道的信噪比(signal to noise ratio,SNR)与误码率(symbol error ratio,SER)之间的关系,基于信号与干扰加噪声比(signal to interference and noise ratio,SINR)描述DoS攻击对信道通信质量的影响,建立能量受限的DoS干扰攻击模型;基于该模型,文献[20]研究DoS攻击下远程估计的防御策略,文献[21]考虑传感器和攻击者均能量受限的情况,研究传感器发送能量与攻击能量的博弈问题. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}