

由于波浪的随机性和不稳定性,容易造成机械系统冲击、电能输出波动的问题,波浪能发电装备通常都采用液压传动方式[1],如英国爱丁堡OPD 公司海蛇号波浪能发电装置[2]、美国OPT公司PowerBuoy点吸收式波浪能发电装置[3]以及国内中国科学院广州能源所研制的鹰式波浪能发电装置[4]等. 虽然各种波浪能发电装置的捕能机构各有不同,但波浪能发电装置的液压能量转换机构原理有相似性,均由波浪能驱动捕能装置,推动液压缸产生液压能,带动液压马达和发电机,转换成电能输出. 随着波浪能技术的不断成熟,发电装置从单捕能机构向多捕能机构发展,如芬兰AW-ENENGY 公司的300 kW的WaveRoller,WaveRoller由 3个捕能机组通过液压管路汇集,驱动液压马达发电机[5]. 由于每个捕能机构的排布位置不同,瞬时所受的波浪力度不同,不同捕能机构的液压支路汇集时压力不同,相互间会产生干扰,直接影响捕能机构的动作和能量的转换效率. 本文提出数字式液压缸组能量转换机构,替代波浪能捕能机构中的常规单液压缸,通过高速开关阀控制进行压力匹配,减少不同液压支路的压力不平衡,实现各捕能机构正常吸收波浪能并对液压缸组做功.
1. 基于数字液压缸组的波浪能装置分布式捕能-集中发电原理
1.1. 数字液压缸组工作原理
图 1
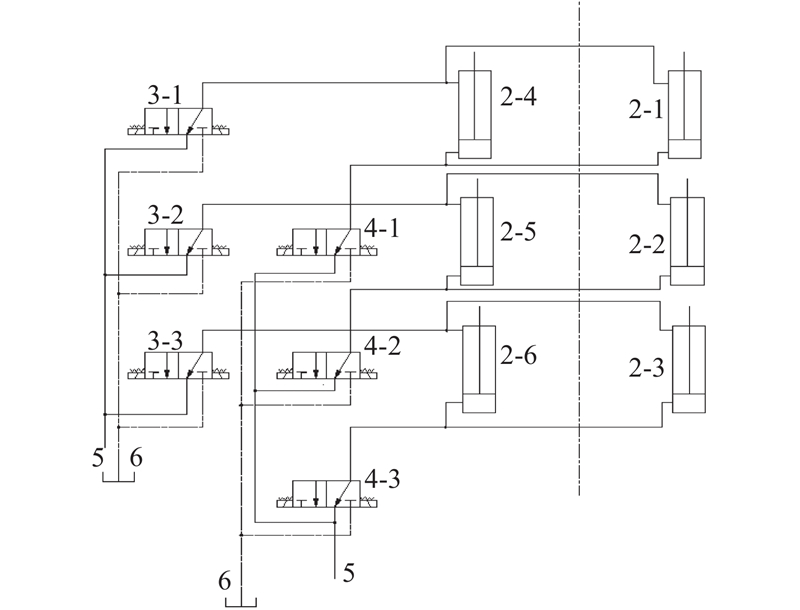
表 1 不同状态下数字液压缸组的编码
Tab.1
| 控制量 | 活塞总面 积状态 | 数字控 制编码 | ||
| 活塞面积 大(2-1 & 2-4) | 活塞面积 中(2-2 & 2-5) | 活塞面积 小(2-3 & 2-6) | ||
| 0 | 0 | 0 | 无效状态 | 000 |
| 0 | 0 | 1 | 小 | 001 |
| 0 | 1 | 0 | 中 | 010 |
| 1 | 0 | 0 | 大 | 100 |
| 0 | 1 | 1 | 小+中 | 011 |
| 1 | 0 | 1 | 小+大 | 101 |
| 1 | 1 | 0 | 中+大 | 110 |
| 1 | 1 | 1 | 小+中+大 | 111 |
1.2. 二级波浪能分散捕能集中发电
以摆式波浪能发电装置为例,分布式捕能-集中发电如图2所示,各浮力摆连接数字液压缸组,通过单向阀组和液压管路,将来自不同浮力摆液压支路的压力油汇集驱动液压马达转动,带动发电机输出电能. 由于浮力摆所处的位置不同,所承受的波浪力不同,若浮力摆连接的是常规的液压缸,则多台捕能机构由于所处位置不同,捕获能量输入会不同,汇集时,彼此间产生的能量、压力不同;若简单地直接连接,则会相互干扰,甚至一台会成为另一台的负载. 当采用图2所示的数字液压缸组时,由数字式液压缸组中每个高速开关阀的控制可以完成类似变量泵的排量调节,在波浪力小的情况下,少量的液压缸切入系统,接入系统的活塞面积减小,可以在小波浪力的情况下,保持较高的压力;在波浪力大的情况下,较多的液压缸切入,接入系统的活塞面积增大,油压可以维持在规定压力范围内,实现不同捕能机构间的压力协调.
图 2
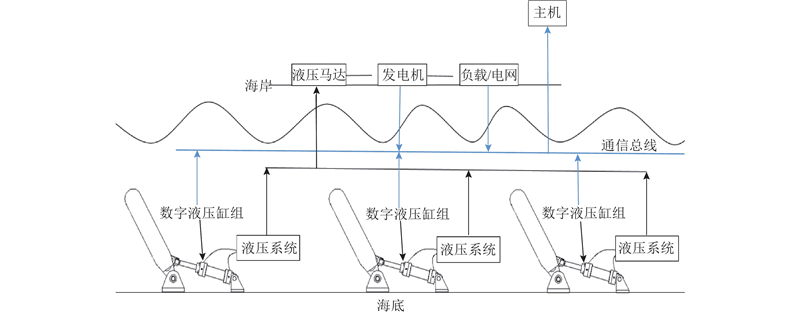
图 2 波浪能分散捕能集中发电示意图
Fig.2 Schematic of distributed wave energy capture and integrated power generation
2. 分布式波浪能系统建模仿真
图 3

图 3 数字液压缸组及发电系统仿真模型
Fig.3 Simulation model of digital hydraulic cylinder group and power generation system
图 4
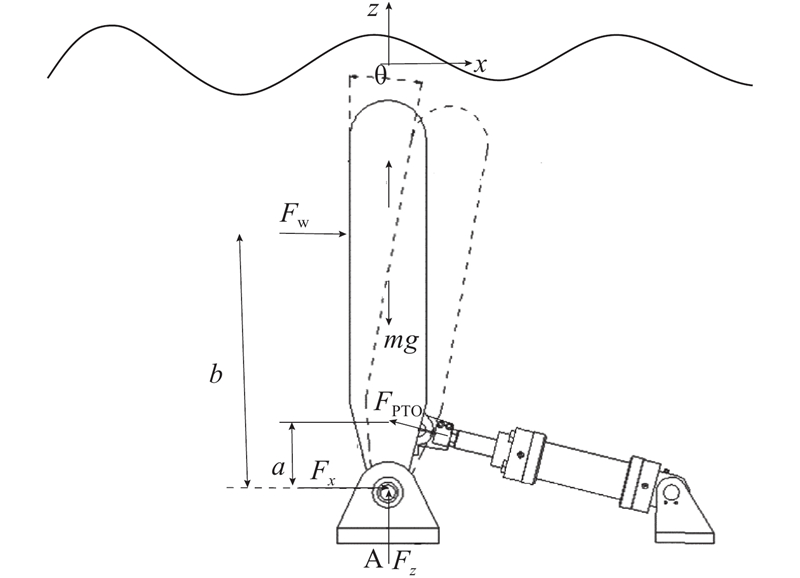
图 4 浮力摆波浪捕能装置结构动力分析
Fig.4 Structural dynamics analysis of oscillating surge wave energy convertor
得到压力场分布后,可以通过对摆面的积分求得波浪作用在摆板上的波浪力大小:
式中:
以摆波能机构运用在浅水区域为例,液压缸铰链可以直接安装在海底固定板上,所以
图 5
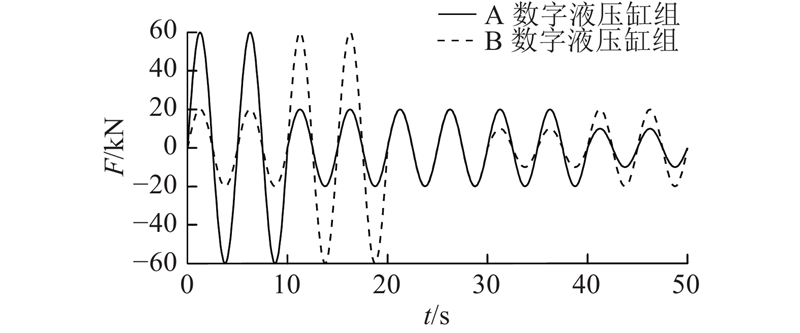
图 5 浮力摆上的模拟波浪作用力
Fig.5 Simulated wave force on flap of oscillating surge wave energy convertor
图 6

图 6 不同控制策略下的仿真结果对比图
Fig.6 Comparison of simulation results under different control strategies
当液压缸活塞接入系统的面积固定时,在较大的波浪力例如60 kN的驱动下,A、B液压缸组的活塞均可以走完20 cm的最大行程,但是在较小波浪力例如20 kN的驱动下,A、B液压缸组活塞最大行程仅有6 cm,吸收的机械能功率约为1 200 W,能量捕获效率较低,此处仿真暂未考虑铰链处的摩擦和缸体内泄漏这2个次要因素. 若液压缸活塞接入系统的面积可以根据外界的波浪驱动力进行调节,则A、B液压缸的活塞在较小的波浪力下可以走完20 cm的行程并且保持8 MPa以上的系统压力,相同驱动下吸收的机械能功率约为4 000 W. 根据不同的波浪驱动力合理调节活塞接入面积的捕能策略,可以捕获更大的能量.
3. 分布式波浪能半物理仿真实验
分布式波浪能半物理仿真实验台由真实的摆式波浪能发电装置和模拟波浪能作用力的液压驱动系统组成. 如图7所示,研究两浮力摆在不同波浪载荷下的液压系统运动控制情况. 每个浮力摆的一端都连接一个数字控制式液压缸组,数字控制式液压缸组输出液压油汇集,驱动液压马达,带动发电机输出电能;为了在陆上模拟波浪载荷输入,浮力摆的另一端连接驱动液压缸,依据数学模型计算得到的波浪载荷,通过两路液压回路单独控制驱动液压缸施加模拟波浪载荷. 实验驱动台有3个液压泵提供压力,其中2个较大的液压泵提供浮力摆驱动压力,另一个较小的液压泵提供补油压力,以避免实验过程中油液泄漏造成的影响. 系统压力的小范围波动可以通过蓄能器进行吸收和缓冲. 在实验中,系统压力设定为8 MPa,模拟的波浪力载荷周期为1 s,总加载时间为5 s,考虑到液压缸组中活塞和内壁的摩擦和惯性因素,不同活塞接入面积下的启动压力不同,均值约为1.1 MPa,因此驱动压力设定为10 MPa,足以产生8 MPa以上的系统压力. 变量液压马达的最大排量为54.8 mL/rev;蓄能器选用初始气压为8 MPa、体积为20 L的皮囊式蓄能器;三相异步电动机的功率为1.5 kW,转速为1 400 r/min;溢流阀压力等级为31.5 MPa.
图 7

图 8
4. 结 论
(1)研制了新型数字式液压缸组,可以通过数字开关控制切入系统的子液压缸数目,调节液压缸进入系统的输入压力.
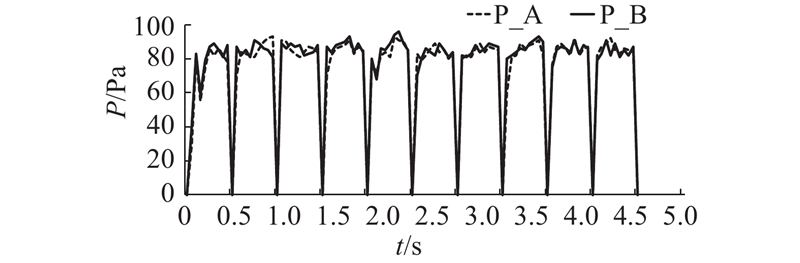
(2)通过计算机仿真和半物理仿真实验表明,各浮力摆在不同波浪载荷的作用下,通过控制数字液压缸组,能够有效减小不同液压支路压力不平衡,使得不同液压支路的液压缸输出压力均高于蓄能器压力,共同输出功率.
参考文献
Review of hydraulic transmission technologies for wave power generation
[J].
Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter
[J].DOI:10.1016/j.renene.2005.08.021 [本文引用: 1]
Modelling a point absorbing wave energy converter by the equivalent electric circuit theory: a feasibility study
[J].
鹰式波浪能发电装置发电系统研究
[J].
Research on power generation system of Eagle wave energy generating device
[J].
Simulation of oscillating buoywave energy generation system based on double-stroke hydraulic transmission
[J].
Simulation of the hydraulic hybrid system based on AMESim
[J].
Modeling of energy extraction and behavior of a flexible floating breakwater
[J].
Discrete displacement hydraulic power take-off system for the wavestar wave energy converter
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}