

卧式螺旋离心机是高效的固液分离设备,具有分离因数高、生产能力强、结构紧凑且能够连续自动化生产等优点,广泛应用于矿业、化工、污水处理等行业中[1]. 卧螺离心机工作环境和载荷多变、激励复杂、工作振动大,需要布置合理的减振措施并预防共振,以确保机器的稳定运行. 因此,准确的振动特性分析成为重点关注和研究方向[2]. 由于现场试验代价高、难度大,一般在有限元虚拟样机中对卧螺离心机进行深入的结构动力学分析. 卧螺离心机作为典型的双转子结构机械,内转子、外转子、差速器及各工作附件间通过螺栓连接、焊接、轴承和花键等多种形式进行连接,装配结构复杂. 不合理的简化和忽略可能导致有限元仿真结果与真实结果偏差较大,甚至可能得出错误的结论. 因此,建立准确的离心机有限元模型成为准确预测结构模态和振动响应的关键.
近年来,对卧螺离心机的有限元建模及基于模型的仿真、优化等已经有了广泛研究. 杨钊等[3]在SolidWorks中对内螺旋转子进行三维建模,研究大长径比卧螺离心机内转子的强度和刚度;张志新等[4]和张国良等[5]在ANSYS中使用梁单元构建离心机一维双转子模型,并以此为基础分析离心机各阶临界转速及提高临界转速的方法,在建模过程中将螺旋刮刀简化为质量点并忽略其轴向刚度;张雷[6]和杨彬等[7]在workbench中对三相卧螺离心机进行三维有限元建模,使用节点重合简化所有连接结构并研究参数对结构刚度的影响及振动情况. 综上所述,现有研究多集中在结构参数对卧螺离心机性能影响的定性分析上,且模型精度都未经过试验检验,所建模型的结构,尤其连接结构经过过多简化,与实际刚度存在较大差别,无法准确地预测不同环境、工况下的各阶模态频率及振动强度等关键信息.
模型的准确性需要以试验作为依据,因此,构建合理的有限元模型,再通过实测数据对模型的不确定参数进行模型修正,成为精确建模的有效途径[8]. 本研究以L202B型卧式螺旋离心机为研究对象,使用单输入多输出模态测试方法得到整机及内螺旋转子的各阶模态参数;在MSC.Patran有限元前处理器中对卧螺离心机的不确定性连接结构进行合理模拟,完成有限元精确建模,进而获得内转子及整机各支撑状态下的模态参数;通过灵敏度分析,分别找到对内转子及整机模态影响最大的连接参数,通过基于动力测试的模型修正方法,使用遗传算法对内螺旋转子和整机有限元模型进行修正.
1. 卧螺离心机结构及工作原理
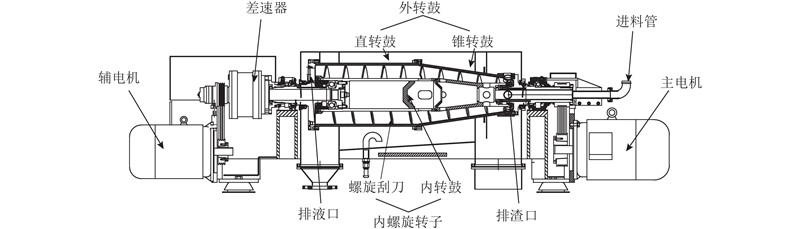
如图1所示为卧螺离心机整机结构简图. 离心机主要结构包括由直转鼓和锥转鼓组成的外转鼓、由螺旋刮刀和内转鼓组成的内螺旋转子、进料管、差速器、主电机、辅电机和机壳等. 其中,主电机通过带轮拖动外转鼓旋转,外转鼓大端盖轴与差速器通过法兰连接同步旋转,行星差速器输出轴与内螺旋转子通过花键联接,带动内螺旋转子相对外转鼓以微差速旋转. 工作时,固液混合物料经进料管进入内转鼓中,在离心力作用下从内转鼓出料口进入外转鼓,其中密度较大的固相发生沉淀并在螺旋刮刀的推动下沿着锥转鼓上行脱水,至排渣口排出,密度较小的澄清液则从外转鼓大端的排液口排出.
图 1
2. 卧螺离心机模态试验及结果
卧式螺旋离心机模态试验采用单输入多输出(single input/multiple output,SIMO)测试方法,当测试对象可以理想化为线弹性结构时,其传递函数只有一行或者一列独立,因此在模态测试中,SIMO法非常有效[9]. 用于测试的卧螺离心机整机为双转子结构,模态试验主要关注转子的弯曲模态频率、振型等模态参数. 试验设备采用八通道OROS动态信号分析仪及Nmodel模态分析软件,激振及信号采集分别使用PCB力锤和单相加速度传感器. 在试验过程采用从整体到局部的测试方法,分别对机械轴承支撑下的整机(见图2(a))、橡胶弹垫支撑下的整机(见图2(b))(模拟自由支撑状态)以及橡胶弹垫支撑下的内螺旋转子(见图2(c))进行模态试验. 对试验得到的各测点频响信号进行处理,获得整机及内转子各支撑条件下前3阶弯曲模态参数,对应的模态振型如图3所示. 图中,Δx为各测点的相对位移.
图 2
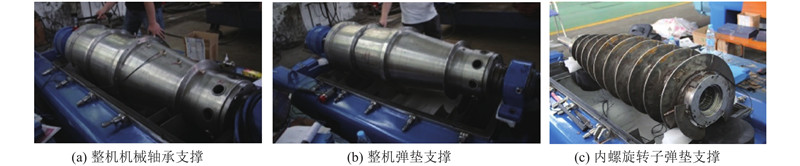
图 3
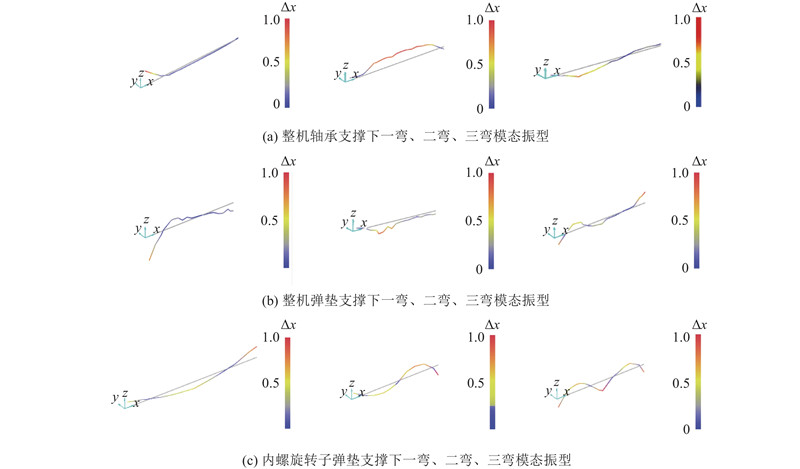
图 3 模态试验前3阶弯曲模态振型辨识结果
Fig.3 Identification of first three bending mode shapes in each modal test
3. 卧螺离心机整机有限元建模及双转子模态分析
依据装配图纸对卧螺离心机各子结构进行三维建模并导入Hypermesh软件中对各子结构进行网格划分. 外转鼓形状规则,全部采用六面体网格划分,内螺旋转子由于形状复杂,采用四面体网格划分.
图 4

图 4 整机有限元模型及装配连接结构建模示意图
Fig.4 Sketch map of decanter centrifuge finite element model and connecting structures
表 1 卧螺离心机各部分轴承支撑刚度
Tab.1
| 轴承位置 | 轴承型号 | F/N | K/(N·m−1) |
| 内螺旋大端 | SKF NU216 | 768 | 1.090×109 |
| 内螺旋小端 | NKI 85/26 | 506 | 1.780×109 |
| 外转鼓大端 | SKF NU1020M/C3 | 3 195 | 1.468×109 |
| 外转鼓小端 | SKF 6218MC4 | 1 852 | 1.974×108 |
完成有限元模型前处理后,分别对3种试验状态下的有限元模型进行模态分析. 内螺旋转子由于是单个零件,其内筒的三阶弯曲振型随频率升高依次排列. 而对于双转子结构旋转机械,其内外转子间通过中介轴承连接,因此整机振型为内外转子振型的叠加,具体表现为其中1根转子刚好达到共振点并呈现出完整模态振型,而另1根转子则会呈现出其某阶模态振型的分量.
有限元各阶模态频率与试验结果对比如表2所示,其中,ft为试验测试模态频率,fa为有限元计算模态频率,Δf为仿真与试验结果的相对误差. 由试验与仿真结果对比可知,内螺旋转子是单个零件,模态试验中干扰因素较少,因此其仿真与试验模态参数拟合较好. 整机的模态参数受到的影响因素较多,并且有限元所赋连接刚度与实际情况有一定误差,导致各阶模态频率与实际频率有较大偏差. 如图5所示为各状态模型的仿真模态振型,可以看出,有限元仿真的各阶模态与试验匹配较好. 其中,整机自由和轴承支撑状态下的一阶振型均为差速器点头振型. 自由支撑的二阶振型,以内转子一阶弯曲为主导,外转鼓呈现一阶分量. 自由支撑的三阶振型,以外转鼓一阶弯曲为主导,内转子呈现一阶分量. 而在整机轴承支撑状态下,外转鼓由于轴承约束,自身固有频率降低,其二、三阶模态振型与自由支撑状态下的相反. 外转鼓测试信号得到的外转鼓振型和频响峰值与有限元分析结果的对比,证明了试验模态阶次辨识的准确性.
表 2 试验模态频率与修正前有限元计算结果对比
Tab.2
| 分析对象 | 阶次 | ft / Hz | fa / Hz | Δf/% |
| 内螺旋自由-自由 | 1 | 528.6 | 514.9 | 2.59 |
| 2 | 1 211.4 | 1 146.5 | 5.36 | |
| 3 | 1 914.0 | 2 005.7 | 4.79 | |
| 整机自由-自由 | 1 | 115.6 | 105.37 | 8.85 |
| 2 | 231.6 | 239.21 | 3.29 | |
| 3 | 347.2 | 309.85 | 10.76 | |
| 整机轴承支撑 | 1 | 103.2 | 90.7 | 12.10 |
| 2 | 146.1 | 132.9 | 9.10 | |
| 3 | 290.8 | 274.3 | 5.70 |
图 5
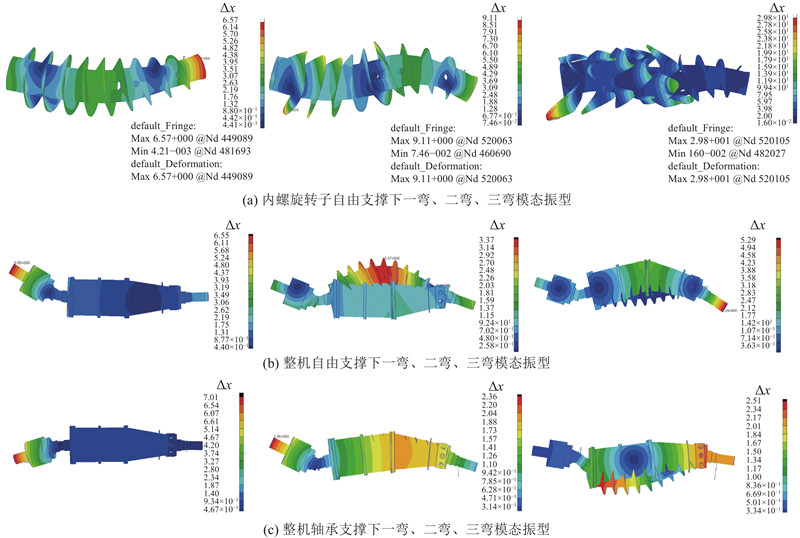
图 5 离心机内转子和整机不同状态下有限元仿真前3阶弯曲模态振型
Fig.5 First three bending mode shapes of screw conveyor and decanter centrifuge under different support conditions
4. 内转子有限元模型修正
在初始有限元理想模型中,内螺旋转子整体被赋予了相同的材料属性,而实际的内螺旋转子的螺旋刮刀与内转鼓之间为焊接结构(见图6). 焊接期间的冷热交替过程在内转鼓表面形成的热影响区对转子的弹性模量会产生一定影响,同时,焊接过程中的焊料分布不均等问题也会导致焊缝层强度不一致. 因此,需要通过修正模型对应区域的弹性模量,使内螺旋转子有限元模态参数与试验相契合.
图 6

如图7所示,将螺旋刮刀依照截面尺寸变化的不同分成4段,将每段螺旋叶片底层5 mm部分设为焊接材料影响层,叶片两侧各10 mm的转子区域设置为焊接热影响层. 在Patran中为各区域单独赋予材料属性,作为待修正因子.
图 7
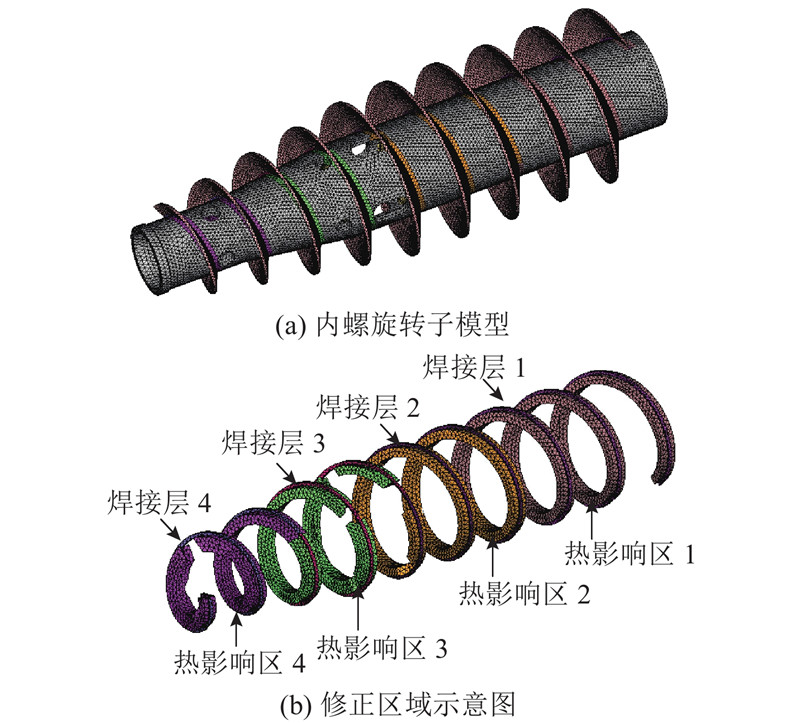
图 7 内螺旋转子模型和修正区域示意图
Fig.7 Fmite element model and updating area of screw conveyor
在对模型进行具体修正之前,需要分析各阶模态对待修正因子的灵敏度大小,以选择对修正目标影响较大的修正因子. 对于模态参数来说,可供选择的修正目标一般有模态频率、模态振型、模态置信度等[11],本研究选择各阶弯曲模态频率作为模型的修正目标,使用中心差分法计算修正目标对各修正因子的灵敏度.
忽略阻尼的影响,多自由度系统的自由振动可以表示为
式中:K为系统刚度矩阵;M为系统质量矩阵;
设Ej为第j处修正区域的弹性模量,式(1)、(2)两侧同时对Ej求导,可以得到
由式(3)、(4)可以得到固有频率的平方对待修正参数的导数即灵敏度函数:
式中:
灵敏度分析得到的内螺旋转子各阶模态参数对待修正参数的灵敏度矩阵归一化结果如图8所示. 图中,n为离心机前3个模态阶次;s为修正参数的归一化灵敏度;Eh1~Eh4为4处焊接层弹性模量,Ew1~Ew4为4处热影响区弹性模量,可见各阶模态对热影响区域弹性模量的灵敏度较大,对焊接层弹性模量的灵敏度较小,因此将4处热影响区域的弹性模量作为最终选定的修正变量.
图 8
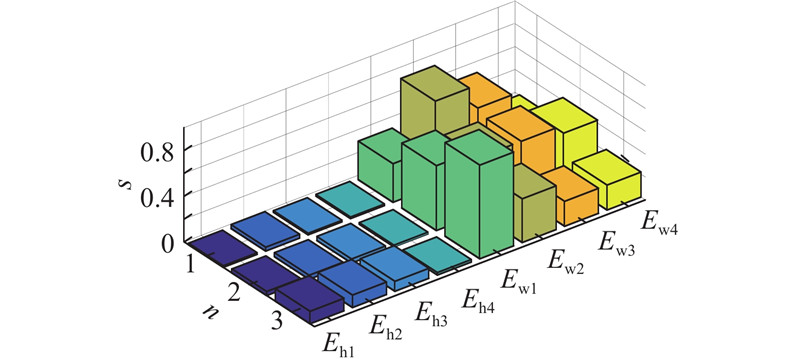
图 8 内转子各阶模态对所选待修正参数的灵敏度分析
Fig.8 Sensitivity analysis of selected updating factors for each modal parameter of screw conveyor
模型修正的目标即通过改变自变量的数值使得模型的动力学参数趋近于真实值,本研究选择遗传算法对仿真模型的模态参数进行修正. 遗传算法是效仿生物界“物竞天择、适者生存”演化法则的进化算法,具有较好的全局搜索能力和强鲁棒性. 在修正过程中,将试验各阶模态频率与仿真频率之差的总和作为遗传算法的适应度函数. 离心机主要工作于一阶频率以下,因此保证模型低频仿真结果的准确性最为重要,给一阶频率误差赋予较大的权值.
综上,将模型修正问题转化为如式(8)所示的求适应度函数最小值的问题:
式中:S为遗传算法适应度函数,为各阶次模态频率差的加权和;k1=4,k2=2,k3=1为各阶次频率误差的计算权值;fai为第i阶计算模态频率;fti为第i阶测试频率;pi为第i个修正区域的弹性模量.
图 9
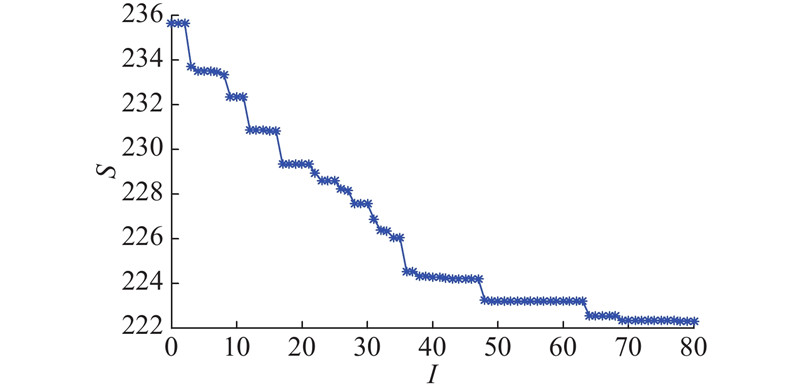
表 3 热影响区弹性模量修正前后对比
Tab.3
| 参数 | Ew1 | Ew2 | Ew3 | Ew4 |
| 修正前 | 193 | 193 | 193 | 193 |
| 修正后 | 320 | 217 | 283 | 320 |
内转子模型修正前后各阶频率与试验结果的对比如表4所示. 其中,foa、Δf1分别为初始有限元模型仿真结果及其与试验结果的差值,fua、Δf2分别为修正后有限元模型仿真结果及其与试验结果的差值. 由于对一阶和二阶模态误差赋予了较高的权重比,修正后前2阶模态误差明显降低,第3阶模态误差有所上升但不影响对工作频段动力学性能的分析.
表 4 内转子模型修前后各阶频率与试验对比结果
Tab.4
| 阶次 | ft/Hz | foa/Hz | Δf1/% | fua/Hz | Δf2/% | |
| 1 | 528.6 | 514.9 | 2.59 | 529.5 | 0.17 | |
| 2 | 1 211.4 | 1 146.5 | 5.36 | 1 185.4 | 2.15 | |
| 3 | 1 914.0 | 2 005.7 | 4.79 | 2 051.6 | 7.19 | |
将模态测试获得的结构阻尼比C1=0.74%,C2=0.53%,C3=0.32%换算成结构阻尼系数代入修正后的有限元模型,计算得到试验测试第15测点与修正前后内转子模型对应测点的频响函数(frequency response function,FRF)如图10所示,可见修正后模型的频响曲线在低频段已经能够较好地拟合试验结果,可以较准确地反映结构的动力学特征.
图 10
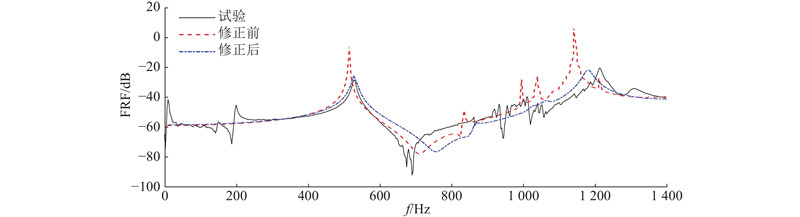
图 10 内转子修正前后仿真频响与试验结果对比
Fig.10 Comparison of frequency response of screw conveyor between test and finite element calculation before and after updating
5. 整机有限元模型修正
将修正后的内螺旋转子代入整机有限元模型中对整机的模态参数进行修正. 与实际离心机相比,整机有限元模型主要在螺栓连接、轴承连接和花键联接处做了简化,使用bush弹簧单元代替实际的连接/支撑结构,因此需要对卧螺机外转子中各连接处的刚度进行修正. 卧螺机外转子模型中的不确定性连接有差速器与端盖轴连接刚度K1、大端盖与直筒段连接刚度K2、直筒段与锥筒段连接刚度K3、锥筒段与小端盖连接刚度K4这4处螺栓连接以及内转子与差速器花键联接刚度K5. 基于文献[12]、[13]中对螺栓连接和花键联接刚度的统计分析结果,对螺栓连接刚度的分析范围设计为1×108~7×109 N/m;花键联接刚度的分析范围设计为1×109~5×109 N/m. 整机自由支撑下各阶弯曲模态对上述修正参数的归一化灵敏度如图11所示. 由于一阶弯曲模态主要表现为差速器轴段点头振动,其模态频率对差速器和端盖轴间的连接刚度灵敏度最大,对其他连接刚度灵敏度较小;整机二阶模态振型主要由内转子一弯振型主导,对外转子轴向螺栓连接刚度变化并不敏感;整机三阶模态振型以外转鼓一阶弯曲为主导,因此其对直筒段与锥筒段的连接刚度变化较为敏感.
图 11

图 11 整机各阶模态频率对各连接刚度的灵敏度分析
Fig.11 Sensitivity analysis of connection stiffness for each modal frequency of decanter centrifuge
基于灵敏度分析结果,对各阶模态频率灵敏度最大的2个设计变量进行相关性分析,分析结果如图12所示. 其中,fi为第i阶弯曲模态频率,K1(K2min)、K1(K2max)分别为当K2取最小值和最大值时,K1与一阶固有频率的关系. 可见连接刚度在1×108~3×109 N/m时自变量之间普遍存在交互效应,随着频率继续增加,交互效应逐渐减弱. 因此三阶模态频率的修正不可分步独立进行,需要在整体优化设计中统一完成.
图 12
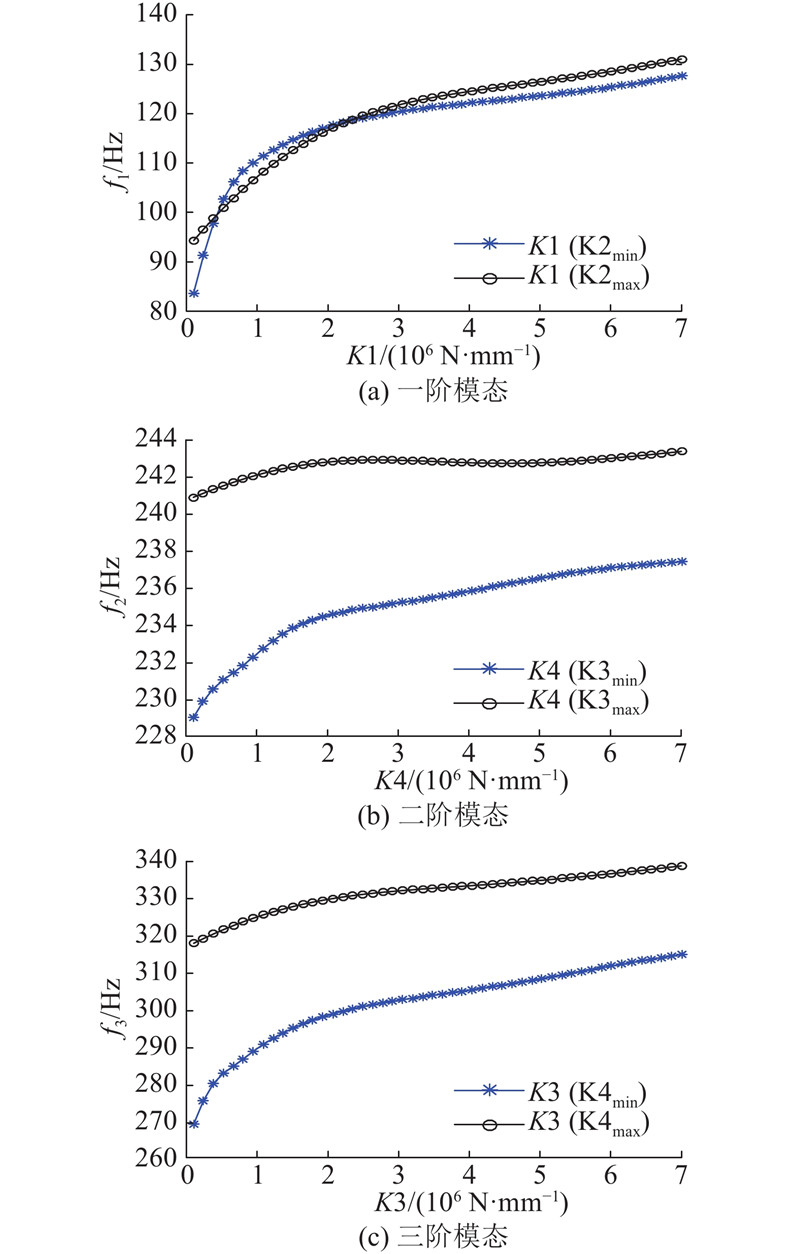
图 12 各阶模态频率灵敏度最大的2个连接刚度交互效应分析
Fig.12 Correlation analysis of first two sensitive connection stiffness in each modal frequency
各段螺栓连接刚度的修正结果如表5所示. 可见,在实际模型中,由于各法兰螺栓预紧力不同等因素的影响,差速器与端盖轴、大端盖与直筒段、直筒段与锥筒段、锥筒与小端盖的螺栓连接刚度较预设值均有不同程度提高,修正结果如表6所示,整机自由模态一阶、三阶模态频率误差大为降低. 将修正结果代入轴承支撑的整机有限元模型中,结果如表7所示. 可见离心机整机轴承支撑下的三阶弯曲模态频率误差均已降低到5%以下,与试验结果的拟合程度可以满足动力学分析的精度要求. 试验激振及响应检测均只在外转子进行,未能对内转子在整机装配中的模态响应进行检测,因此整机自由状态下以内转子为主振型的模态频率即二阶频率误差较大. 对于更高阶次的整机频率识别,为保证不出现阶次误判,需要首先对选用的机械轴承进行进一步的支撑刚度辨识试验.
表 5 连接刚度修正前、后对比
Tab.5
| 修正参数 | K1 | K2 | K3 | K4 |
| 修正前 | 500 000 | 500 000 | 500 000 | 500 000 |
| 修正后 | 1 338 746 | 1 320 746 | 2 573 608 | 2 979 869 |
表 6 整机自由支撑模型修正结果
Tab.6
| 阶次 | ft/Hz | foa/Hz | Δf1/% | fua/Hz | Δf2/% |
| 1 | 115.6 | 105.37 | 8.85 | 117.63 | 1.73 |
| 2 | 231.6 | 239.21 | 3.29 | 244.06 | 5.31 |
| 3 | 347.2 | 309.85 | 10.76 | 337.87 | 2.37 |
表 7 整机支撑状态模型修正结果
Tab.7
| 阶次 | ft/Hz | foa/Hz | Δf1/% | fua/Hz | Δf2/% |
| 1 | 103.2 | 90.7 | 12.1 | 102.5 | 0.7 |
| 2 | 146.1 | 132.9 | 9.1 | 142.1 | 2.7 |
| 3 | 290.8 | 274.3 | 5.7 | 284.2 | 2.3 |
同时,由整机模态测试和有限元分析结果可知,卧螺离心机整机轴承支撑下一阶模态为差速器点头振动,频率为103 Hz,符合离心机设计规范中大于工作转速(66 Hz)1.43倍的设计要求. 另外,对于同型卧螺离心机,在符合结构强度的前提下,改进差速器和大端盖轴的连接结构,增强连接刚度,是提高工作转速、保证工作稳定性进而提高生产效率最直接有效的方法.
6. 结 语
以L202B型卧式螺旋离心机为基础,通过SIMO模态测试方法,由总体到局部分别对整机机械轴承支撑、自由支撑和内螺旋转子自由支撑状态下的模态参数进行测试并辨识出各阶模态. 在Patran有限元前处理器中研究双转子复杂装配体各连接结构的模拟方式,并分析得到试验状态下双转子结构有限元模型的各阶模态参数,其各阶振型与试验结果一致. 针对仿真模态频率与试验结果误差较大的现象,通过灵敏度分析,找出对各阶模态频率影响最大的连接结构参数;使用基于遗传算法的模型修正方法,分别对螺旋叶片与内转子间焊接热影响区弹性模量和外转子各法兰螺栓连接刚度进行修正,使内转子和整机的模态频率,尤其一阶弯曲模态频率与试验基本吻合. 修正后的卧螺离心机整机装配体有限元模型可以准确地表达离心机前3阶固有频率内的动力学特征,对分析离心机工作转速频率段的振动情况、减震提速措施及基于修正结果的结构参数优化有着重要意义,也对类似的复杂双转子装配结构的建模及修正提供了有效的借鉴方法.
参考文献
Properties of decanter centrifuges in the mining industry
[J].
大长径比卧螺离心机螺旋输送器的有限元分析
[J].DOI:10.3969/j.issn.1005-8265.2011.04.004 [本文引用: 1]
Finite element analysis of screw conveyor of horizontal screw centrifuge with large aspect ratio
[J].DOI:10.3969/j.issn.1005-8265.2011.04.004 [本文引用: 1]
高速卧螺离心机动力性能优化
[J].DOI:10.3969/j.issn.0254-6094.2015.05.018 [本文引用: 1]
Dynamic performance optimization of high-speed decanter centrifuge
[J].DOI:10.3969/j.issn.0254-6094.2015.05.018 [本文引用: 1]
卧螺离心机螺旋输送器转子系统的动力学分析
[J].DOI:10.3969/j.issn.1003-5311.2013.12.034 [本文引用: 1]
Dynamic analysis on the spiral conveyor rotor system of horizontal spiral centrifuge
[J].DOI:10.3969/j.issn.1003-5311.2013.12.034 [本文引用: 1]
基于Ansys的卧螺过滤离心机的动态特性优化
[J].
Dynamic charactrtistic optimization of horizontal worm screen centrifuge based on Ansys
[J].
基于模态频率和有效模态质量的有限元模型修正
[J].
Finite element model updating based on modal frequency and effective modal mass
[J].
Active magnetic bearing rotor model updating using resonance and MAC error
[J].
基于接触面特征的螺栓联接刚度研究
[J].DOI:10.3969/j.issn.1000-1093.2017.01.026 [本文引用: 1]
Study of bolt joint stiffness based on contact surface characteristics
[J].DOI:10.3969/j.issn.1000-1093.2017.01.026 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}