|
|
|
| Free-force control of flexible robot joint system without sensors on link side |
Jian-ming XU( ),Zhi-peng ZHAO,Jian-wei DONG ),Zhi-peng ZHAO,Jian-wei DONG |
| College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China |
|
|
|
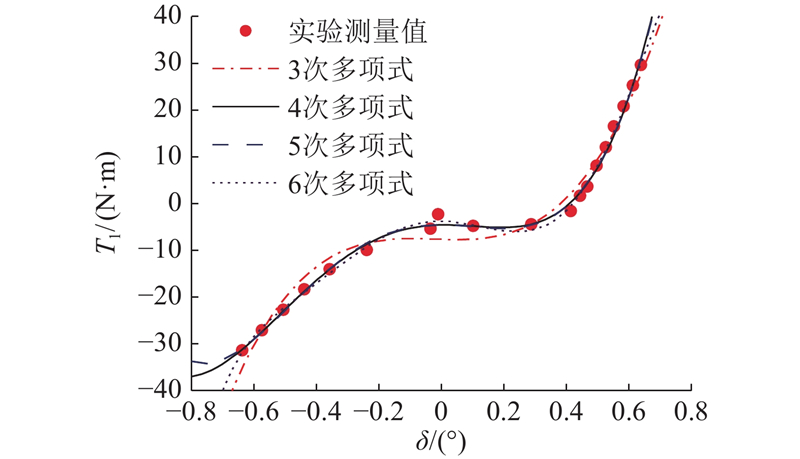
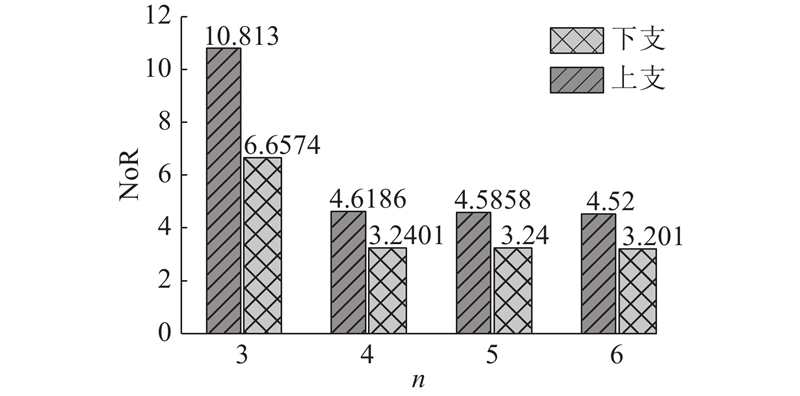
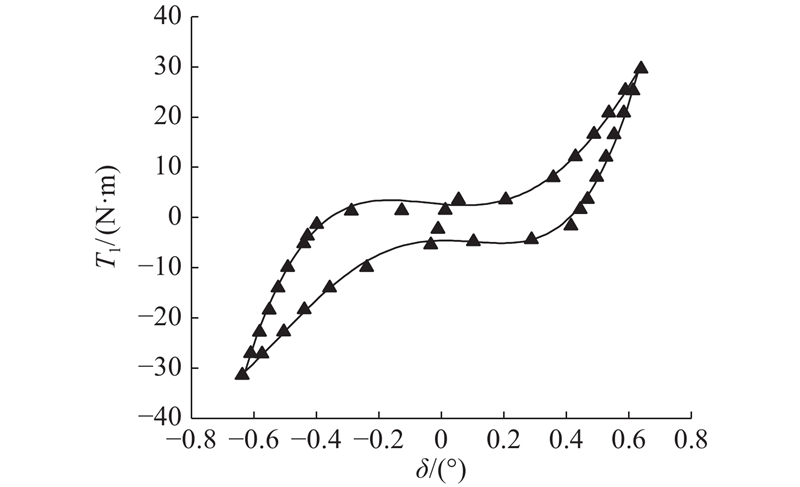
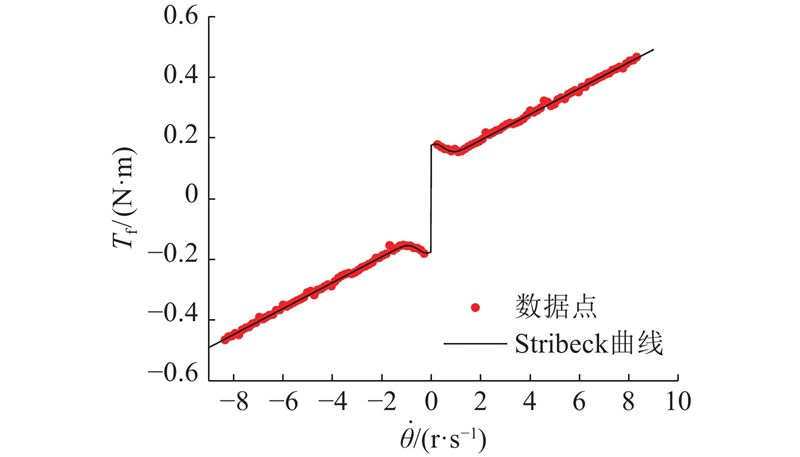
Abstract A free-force control method of the flexible robot joint system without sensors on link side was proposed aiming at the application of robot direct teaching. The dynamic LuGre model was introduced to estimate the joint friction. Two-segment quartic polynomial was adopted to describe the stiffness of the flexible robot joint system. The joint torque was observed based on the generalized momenta. The torsional displacement of the harmonic drive was estimated through the inverse stiffness model and the joint torque among the algorithm. The gravity and angle on link side were figured out by combining torsional angle with motion transmission characteristics. The contact torque was obtained by utilizing the kinetic equation on link side. Then a desired motor driving torque was constructed comprising the gravity, joint friction and the contact torque. The free-force control was realized by tracking this desired motor torque. The experiments were conducted on the laboratory setup of the flexible robot joint system. The experimental results show that the contact torque is about 1.8 N·m when accomplishing the same drag teaching process. The free-force control method based on the compensation of gravity and friction requires a contact torque of about 3.4 N·m. The contact torque required for the power stage off teaching is approximately 14 N·m. The experimental results verify that the proposed method has a practical effect.
|
|
Received: 17 January 2020
Published: 05 July 2020
|
|
|
连杆侧无传感器下机器人柔性关节系统的零力控制
针对机器人直接示教应用场景,提出机器人柔性关节系统在连杆侧无传感器下的零力控制方法. 引入动态LuGre摩擦模型进行关节摩擦力矩估计,采用2段四次多项式建立柔性关节系统刚度模型,基于广义动量观测关节力矩. 该方法利用刚度逆模型以及关节力矩估算谐波减速器扭转位移,结合谐波减速器运动传递特性估计连杆侧角度并计算重力矩,利用连杆动力学方程估计接触力矩. 构建期望的电机驱动力矩(包含估计的重力矩、摩擦力矩与接触力矩),通过对该期望电机驱动力矩的跟踪实现零力控制. 在搭建的机器人柔性关节系统实验平台上进行实验. 实验结果表明,完成相同的拖动示教过程时,该方法所需要的接触力矩约为1.8 N·m. 基于重力矩与摩擦力矩补偿的零力控制方法需要接触力矩约为3.4 N·m. 功率级脱离示教所需要的接触力矩约为14 N·m,验证了所提方法的实际效果.
关键词:
人机交互,
零力控制,
摩擦补偿,
重力补偿,
柔性关节
|
|
| [1] |
BOWYER S A, BAENA F R Dissipative control for physical human-robot interaction[J]. IEEE Transactions on Robotics, 2015, 31 (6): 1281- 1293
doi: 10.1109/TRO.2015.2477956
|
|
|
| [2] |
KIM Y M, KOO S Y, LIM J G, et al A robust online touch pattern recognition for dynamic human-robot interaction[J]. IEEE Transactions on Consumer Electronics, 2010, 56 (3): 1979- 1987
doi: 10.1109/TCE.2010.5606355
|
|
|
| [3] |
STIEFELHAGEN R, EKENEL H K, FUGEN C, et al Enabling multimodal human–robot interaction for the karlsruhe humanoid robot[J]. IEEE Transactions on Robotics, 2007, 23 (5): 840- 851
doi: 10.1109/TRO.2007.907484
|
|
|
| [4] |
YU H, HUANG S, CHEN G, et al Human–robot interaction control of rehabilitation robots with series elastic actuators[J]. IEEE Transactions on Robotics, 2015, 31 (5): 1089- 1100
doi: 10.1109/TRO.2015.2457314
|
|
|
| [5] |
ZHANG J, CHEAH C C Passivity and stability of human–robot interaction control for upper-limb rehabilitation robots[J]. IEEE Transactions on Robotics, 2015, 31 (2): 233- 245
doi: 10.1109/TRO.2015.2392451
|
|
|
| [6] |
孙月, 刘景泰 基于RGB-D传感器的室内服务机器人舒适跟随方法[J]. 机器人, 2019, 41 (6): 823- 833
SUN Yue, LIU Jing-tai RGB-D sensor based human comfortable following behavior for service robots in indoor environments[J]. Robot, 2019, 41 (6): 823- 833
|
|
|
| [7] |
BERGELES C, YANG G Z From passive tool holders to microsurgeons: safer, smaller, smarter surgical robots[J]. Transactions on Biomedical Engineering, 2013, 61 (5): 1565- 1576
|
|
|
| [8] |
DU G, CHEN M, LIU C, et al Online robot teaching with natural human–robot interaction[J]. IEEE Transactions on Industrial Electronics, 2018, 65 (12): 9571- 9581
doi: 10.1109/TIE.2018.2823667
|
|
|
| [9] |
SADRFARIDPOUR B, WANG Y Collaborative assembly in hybrid manufacturing cells: an integrated framework for human–robot interaction[J]. IEEE Transactions on Automation Science Engineering, 2017, 15 (3): 1178- 1192
|
|
|
| [10] |
SHENG W, THOBBI A, GU Y An integrated framework for human–robot collaborative manipulation[J]. IEEE Transactions on Cybernetics, 2014, 45 (10): 2030- 2041
|
|
|
| [11] |
STILLI A, DIMITRAKAKIS E, D'ETTORRE C, et al Pneumatically attachable flexible rails for track-guided ultrasound scanning in robotic-assisted partial nephrectomy: a preliminary design study[J]. IEEE Robotics and Automation Letters, 2019, 4 (2): 1208- 1215
doi: 10.1109/LRA.2019.2894499
|
|
|
| [12] |
侯澈, 王争, 赵忆文, 等 面向直接示教的机器人负载自适应零力控制[J]. 机器人, 2017, 39 (4): 439- 448
HOU Che, WANG Zheng, ZHAO Yi-wen, et al Load adaptive force-free control for the direct teaching of robots[J]. Robot, 2017, 39 (4): 439- 448
|
|
|
| [13] |
游有鹏, 张宇, 李成刚 面向直接示教的机器人零力控制[J]. 机械工程学报, 2014, 50 (3): 10- 17
YOU You-peng, ZHANG Yu, LI Cheng-gang Force-free control for the direct teaching of robots[J]. Journal of Mechanical Engineering, 2014, 50 (3): 10- 17
doi: 10.3901/JME.2014.03.010
|
|
|
| [14] |
张铁, 洪景东, 刘晓刚 基于弹性摩擦模型的机器人免力矩传感器拖动示教方法[J]. 农业机械学报, 2019, 50 (1): 419- 427
ZHANG Tie, HONG Jing-dong, LIU Xiao-gang Dragging teaching method without torque sensor for robot based on elastic friction model[J]. Transactions of the Chinese Society of Agricultural Machinery, 2019, 50 (1): 419- 427
|
|
|
| [15] |
YUAN J, WANG S, WAN W, et al Direct teaching of industrial manipulators using current sensors[J]. Assembly Automation, 2018, 38 (2): 216- 225
doi: 10.1108/AA-02-2017-027
|
|
|
| [16] |
PARK C, KYUNG J H, DO H M, et al. Development of direct teaching robot system [C] // 2011 8th International Conference on Ubiquitous Robots and Ambient Intelligence. Incheon: IEEE, 2011: 730-732.
|
|
|
| [17] |
PARK D I, PARK C, KYUNG J H. Design and analysis of direct teaching robot for human-robot cooperation [C] // 2009 IEEE International Symposium on Assembly and Manufacturing. Suwon: IEEE, 2009: 220-224.
|
|
|
| [18] |
PARK D I, PARK C, KYUNG J H. Signal processing of direct teaching data for human-robot cooperation [C] // 2010 IEEE International Symposium on Industrial Electronics. Bari: IEEE, 2010: 1956-1960.
|
|
|
| [19] |
胡建元, 黄心汉, 陈锦江 Movemaster-EX机器人零力跟踪控制[J]. 华中理工大学学报, 1993, 21 (6): 135- 139
HU Jian-yuan, HUANG Xin-han, CHEN Jin-jiang Zero-force control for a type movemaster-EX robot[J]. Journal of Huazhong University of Science and Technology, 1993, 21 (6): 135- 139
|
|
|
| [20] |
TJAHJOWIDODO T, AL-BENDER F, VAN BRUSSEL H Theoretical modelling and experimental identification of nonlinear torsional behaviour in harmonic drives[J]. Mechatronics, 2013, 23 (5): 497- 504
doi: 10.1016/j.mechatronics.2013.04.002
|
|
|
| [21] |
TUTTLE T D, SEERING W P A nonlinear model of a harmonic drive gear transmission[J]. IEEE Transactions on Robotics and Automation, 1996, 12 (3): 368- 374
doi: 10.1109/70.499819
|
|
|
| [22] |
RUDERMAN M, IWASAKI M Sensorless torsion control of elastic-joint robots with hysteresis and friction[J]. IEEE Transactions on Industrial Electronics, 2015, 63 (3): 1889- 1899
|
|
|
| [23] |
BITTENCOURT A C, GUNNARSSON S Static friction in a robot joint: modeling and identification of load and temperature effects[J]. Journal of Dynamic Systems, Measurement and Control, 2012, 134 (5): 1581- 1589
|
|
|
| [24] |
KENNEDY C W, DESAI J P Modeling and control of the Mitsubishi PA-10 robot arm harmonic drive system[J]. IEEE/ASME Transactions on Mechatronics, 2005, 10 (3): 263- 274
doi: 10.1109/TMECH.2005.848290
|
|
|
| [25] |
JOHANASTROM K, CANUDAS C Revisiting the LuGre friction model[J]. IEEE Control Systems, 2009, 28 (6): 101- 114
|
|
|
| [26] |
ZHANG Q, LIU G Precise control of elastic joint robot using an interconnection and damping assignment passivity-based approach[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21 (6): 2728- 2736
doi: 10.1109/TMECH.2016.2578287
|
|
|
| [27] |
WU Z Adaptive block compensation trajectory tracking control based on LuGre friction model[J]. International Journal of Advanced Robotic Systems, 2019, 16 (5): 1- 10
|
|
|
| [28] |
李智靖, 叶锦华, 吴海彬 基于卷积力矩观测器与摩擦补偿的机器人碰撞检测[J]. 浙江大学学报: 工学版, 2019, 53 (3): 427- 434
LI Zhi-jing, YE Jin-hua, WU Hai-bin Robot collision detection with convolution torque observer and friction compensation[J]. Journal of ZheJiang University: Engineering Science, 2019, 53 (3): 427- 434
|
|
|
| [29] |
OLSSON H. Control systems with friction [D]. Sweden: Lund Institute of Technology, 1996.
|
|
|
| [30] |
RUDERMAN M, BERTRAM T, IWASAKI M Modeling, observation, and control of hysteresis torsion in elastic robot joints[J]. Mechatronics, 2014, 24 (5): 407- 415
doi: 10.1016/j.mechatronics.2014.02.009
|
|
|
| [31] |
李智靖, 叶锦华, 吴海彬 机器人带未知负载条件下的碰撞检测算法[J]. 机器人, 2020, 42 (1): 29- 38
LI Zhi-jing, YE Jin-hua, WU Hai-bin Collision detection algorithm for robots with unknown payload[J]. Robot, 2020, 42 (1): 29- 38
|
|
|
| [32] |
钟琮玮, 项基, 韦巍, 等 基于扰动观测器的机械手碰撞检测与安全响应[J]. 浙江大学学报: 工学版, 2012, 46 (6): 1115- 1121
ZHONG Cong-wei, XIANG Ji, WEI Wei, et al Collision detection and safe reaction of manipulator based on disturbance observer[J]. Journal of Zhejiang University: Engineering Science, 2012, 46 (6): 1115- 1121
|
|
|
| [33] |
DE LUCA A, MATTONE R. Actuator failure detection and isolation using generalized momenta [C] // 2003 IEEE International Conference on Robotics and Automation. Taipei: IEEE, 2003: 634-639.
|
|
|
| [34] |
PERSIS C D, ISIDORI A A geometric approach to nonlinear fault detection and isolation[J]. Transactions on Automatic Control, 2001, 46 (6): 853- 865
|
|
|
| [35] |
ZHANG H, AHMAD S, LIU G Torque estimation for robotic joint with harmonic drive transmission based on position measurements[J]. IEEE Transactions on Robotics, 2015, 31 (2): 322- 330
doi: 10.1109/TRO.2015.2402511
|
|
|
| [36] |
LEE W, LEE C Y, JEONG Y H, et al Distributed component friction model for precision control of a feed drive system[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20 (4): 1966- 1974
doi: 10.1109/TMECH.2014.2365958
|
|
|
| [37] |
廖洪波, 范世珣, 黑墨, 等 光电稳定平台伺服系统动力学建模与参数辨识[J]. 光学精密工程, 2015, 23 (2): 477- 484
LIAO Hong-bo, FAN Shi-xun, HEI Mo, et al Modeling and parameter identification for electro-optical stabilized platform servo systems[J]. Optics and Precision Engineering, 2015, 23 (2): 477- 484
doi: 10.3788/OPE.20152302.0477
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|