| Mechanical Engineering |
|


|
|
|
| Robot collision detection with convolution torque observer and friction compensation |
Zhi-jing LI( ),Jing-hua YE,Hai-bin WU*() ),Jing-hua YE,Hai-bin WU*() |
| School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350116, China |
|
|
|
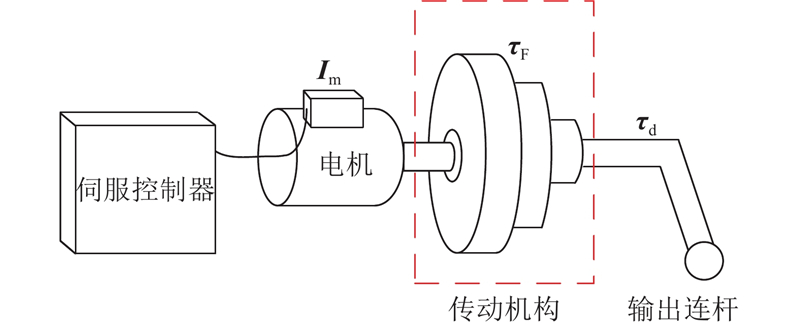
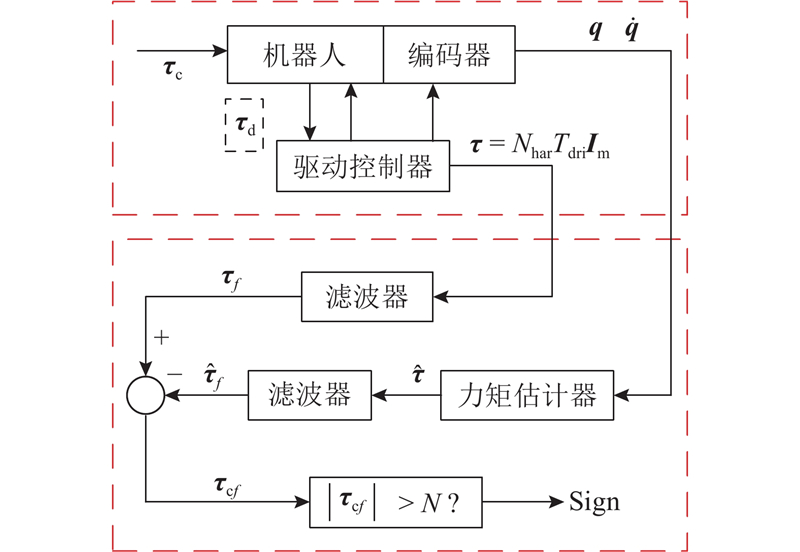
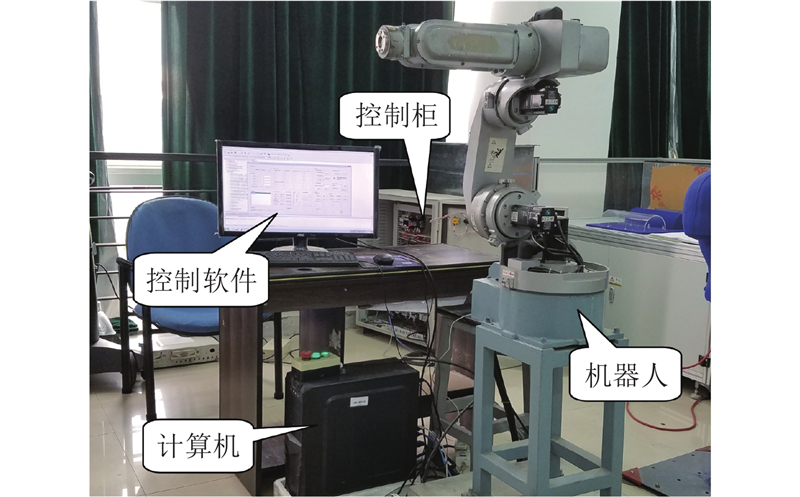
Abstract A new type of robot collision detection algorithm was proposed for the security problem that collision may occur when conventional industrial robots operate in an unknown environment. The convolution torque observer was designed. The robot collision detection was realized by real-time observation of the deviation between the joint output torque and the dynamic estimation torque. The static LuGre model was used to compensate the joint friction in order to avoid the interference of joint friction of the robot in different poses and motion states on robot collision detection. By monitoring the motion of actual industrial robots, more accurate static LuGre model parameters were identified. The collision detection algorithm does not need acceleration information, avoiding the calculation error caused by the secondary derivation of the position feedback information. The joint torque was acquired based on the current information of the joint servo drive. It is not necessary to install a special force/torque sensor. Therefore, in the case of conventional industrial robots without additional configuration, just collect the robot joint drive motor current and position information to achieve collision detection. The effectiveness of the collision detection algorithm is verified by human-robot interaction experiments.
|
|
Received: 09 October 2018
Published: 04 March 2019
|
|
|
|
Corresponding Authors:
Hai-bin WU
E-mail: lizhijingwei@163.com;wuhb@fzu.edu.cn
|
基于卷积力矩观测器与摩擦补偿的机器人碰撞检测
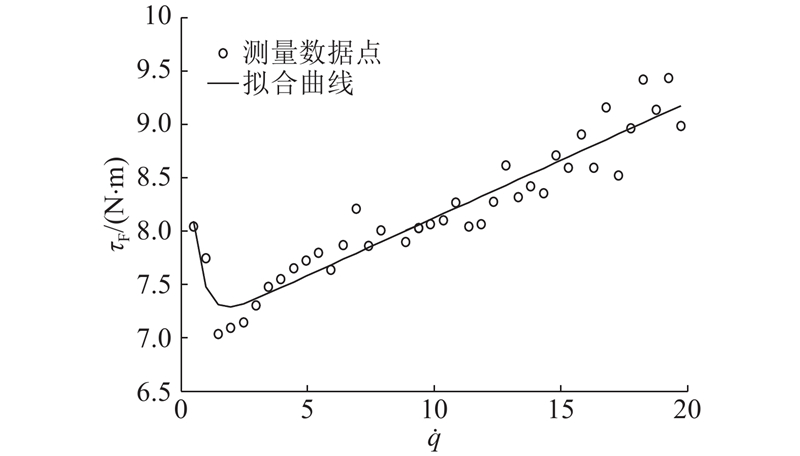
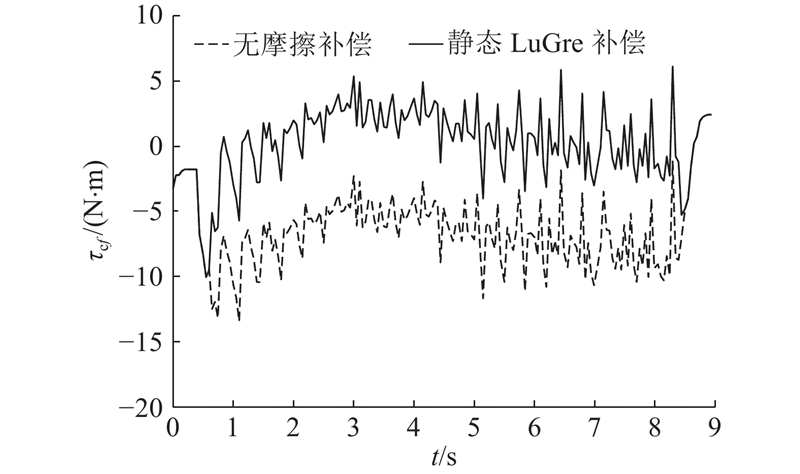
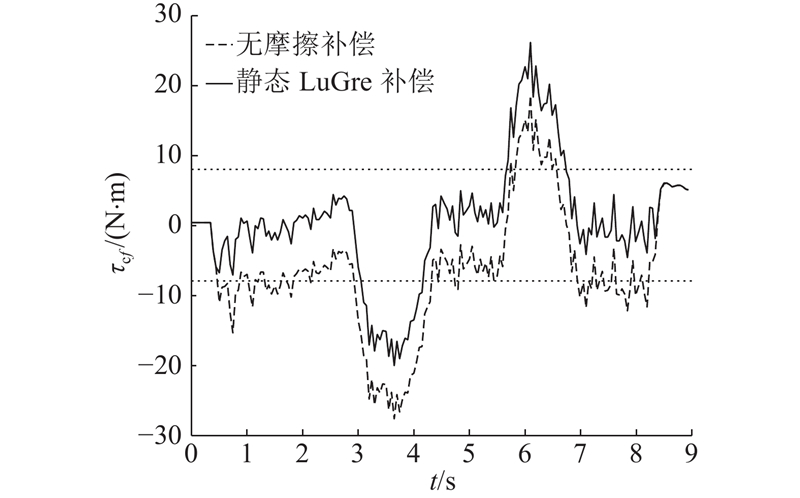
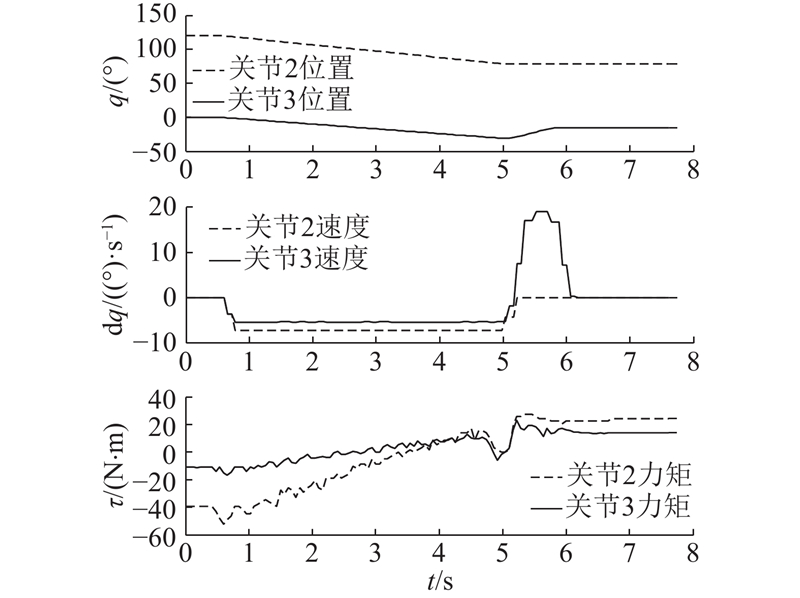
针对常规工业机器人在未知环境下运行时可能产生碰撞的安全性问题,提出一种新型的机器人碰撞检测算法. 设计卷积力矩观测器,通过实时观测关节输出力矩与动力学估计力矩的偏差实现机器人碰撞检测. 为了避免机器人处于不同位姿、运动状态等情况下关节摩擦对机器人碰撞检测的干扰,采用静态LuGre模型对关节摩擦进行补偿. 通过对实际工业机器人的运动监测,辨识出更加准确的静态LuGre模型参数. 该碰撞检测算法无需加速度信息,避免了对位置反馈信息二次求导所带来的计算误差. 关节力矩基于关节伺服驱动的电流信息获取,无需安装专门的力/力矩传感器,从而在常规工业机器人无需额外配置的情况下,只需采集机器人关节驱动电机电流和位置信息即可实现碰撞检测. 通过人与机器人交互实验验证了该碰撞检测算法的有效性.
关键词:
机器人安全,
卷积力矩观测器,
摩擦补偿,
碰撞检测,
静态LuGre模型
|
|
| [1] |
HADDADIN S, DE LUCA A, ALBU-SCHAFFER A Robot Collisions: A Survey on Detection, Isolation, and Identification[J]. IEEE Transactions on Robotics, 2017, 33 (6): 1292- 16312
doi: 10.1109/TRO.2017.2723903
|
|
|
| [2] |
MAURTUA I, IBARGUREN A, KILDAL J, et al Human-robot collaboration in industrial applications: Safety, interaction and trust[J]. International Journal of Advanced Robotic System, 2017, 14 (4): 1- 10
|
|
|
| [3] |
ZINN M, KHATIB O, ROTH B, et al Playing it safe: human-friendly robots[J]. IEEE Robotics and Automation Magazine, 2004, 11 (2): 12- 21
doi: 10.1109/MRA.2004.1310938
|
|
|
| [4] |
BUONDONNO G, DE LUCA A. Combining real and virtual sensors for measuring interaction forces and moments acting on a robot [C] // IEEE International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 794–800.
|
|
|
| [5] |
ALBU-SCHAFFER A, HADDADIN S, OTT C, et al The DLR lightweight robot: design and control concepts for robots in human environments[J]. Industrial Robot, 2007, 34 (5): 376- 385
doi: 10.1108/01439910710774386
|
|
|
| [6] |
DE LUCA A, ALBU-SCHAFFER A, HADDADIN S, et al. Collision detection and safe reaction with the DLR-III lightweight manipulator arm [C] // IEEE International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006: 1623–1630.
|
|
|
| [7] |
SANTIS A D, SICILIANO B, DE LUCA A, et al An atlas of physical human-robot interaction[J]. Mechanism and Machine Theory, 2008, 43 (3): 253- 270
doi: 10.1016/j.mechmachtheory.2007.03.003
|
|
|
| [8] |
VILLANI V, PINI F, LEALI F, et al Survey on human–robot collaboration in industrial settings: safety, intuitive interfaces and applications[J]. Mechatronics, 2018, 55: 248- 266
|
|
|
| [9] |
LI Z J, WU H B, YANG J M, et al A position and torque switching control method for robot collision safety[J]. International Journal of Automation and Computing, 2018, 15 (2): 156- 168
doi: 10.1007/s11633-017-1104-9
|
|
|
| [10] |
INDRI M, TRAPANI S, LAZZERO I Development of a virtual collision sensor for industrial robots[J]. Sensor, 2017, 17 (5): 1148
doi: 10.3390/s17051148
|
|
|
| [11] |
钟琮玮, 项基, 韦巍, 等 基于扰动观测器的机械手碰撞检测与安全响应[J]. 浙江大学学报: 工学版, 2012, 46 (6): 1115- 1121
ZHONG Cong-wei, XIANG Ji, WEI Wei, et al Collision detection and safe reaction of manipulator based on disturbance observer[J]. Journal of Zhejiang University: Engineering Science, 2012, 46 (6): 1115- 1121
|
|
|
| [12] |
吴海彬, 李实懿, 吴国魁 基于动量偏差观测器的机器人碰撞检测算法[J]. 电机与控制学报, 2015, 19 (5): 97- 104
WU Hai-bin, LI Shi-yi, WU Guo-kui Collision detection algorithm for robot manipulator based on momentum deviation observer[J]. Electric Machines and Control, 2015, 19 (5): 97- 104
|
|
|
| [13] |
KERMANI M R, PATEL R V, MOALLEM M Friction identification and compensation in robotic manipulators[J]. IEEE Transactions on Instrumention and Measurement, 2007, 56 (6): 2346- 2353
doi: 10.1109/TIM.2007.907957
|
|
|
| [14] |
CHEN S X, LUO M Z, HE F A universal algorithm for sensorless collision detection of robot actuator[J]. Advances in Mechanical Engineering, 2017, 10 (1): 1- 10
|
|
|
| [15] |
LEE S D, KIM M C, SONG J B. Sensorless collision detection for safe human-robot collaboration [C] // IEEE International Conference on Intelligant Robots and Systems. Hamburg: IEEE, 2015: 2392–2397.
|
|
|
| [16] |
LEE S D, SONG J B Sensorless collision based on friction model for a robot manipulator[J]. International Journal of Precision Engineering and Manufacturing, 2016, 17 (1): 11- 17
doi: 10.1007/s12541-016-0002-3
|
|
|
| [17] |
DIXON W E, WALKER I D, DAWSON D M, et al Fault detection for robot manipulators with parametric uncertainty: a prediction-error-based approach[J]. IEEE Transactions on Robotics and Automation, 2000, 16 (6): 689- 699
doi: 10.1109/70.897780
|
|
|
| [18] |
DAMME M V, BEYL P, VANDERBORGHT B, et al. Estimating robot end-effector force from noisy actuator torque measurements [C] // IEEE International Conference on Intelligent Robots and Automation. Shanghai: IEEE, 2011: 1108–1113.
|
|
|
| [19] |
BITTENCOURT A C, GUNNARSSON S Static Friction in a robot joint: modeling and identification of load and temperature effects[J]. Journal of Dynamic Systems Measurement and Control, 2012, 134 (5): 1581- 1589
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|