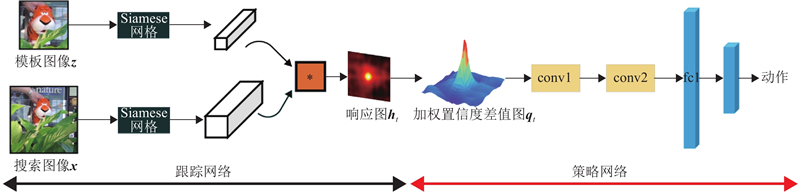
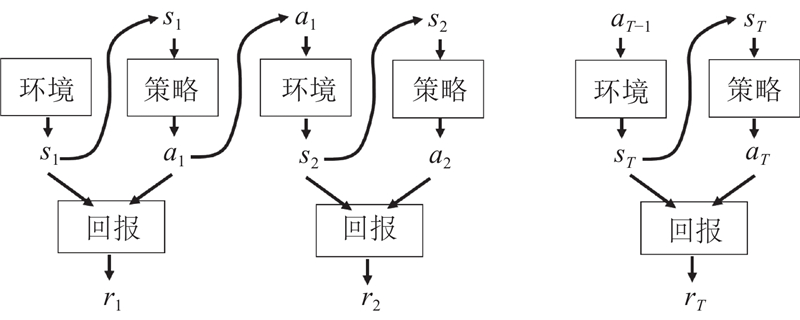
An object tracking method based on policy gradient was proposed aiming at the problems of occlusion, deformation and fast motion in the process of object tracking. The policy gradient algorithm was used to train the policy network. The policy network can make action decisions founded on the reliability of current tracking results to avoid the incorrect template update or re-detect the missing targets. During the decision-making process, the robustness and accuracy of the current tracking result were both analyzed by calculating the weighted confidence margin, which helped the policy network to evaluate the tracking results more accurately. During the re-detection process, an efficient re-detection method was proposed to filter a large number of searching areas, which greatly improved the search efficiency. The decision-making module was utilized to examine the re-detected result, which ensured the accuracy of the re-detected results. The proposed algorithm was evaluated on OTB dataset and LaSOT dataset. The experimental results show that the proposed tracking algorithm improves performance by 2.5%-4.0% based on the original algorithm.
Kang-hao WANG,Hai-bing YIN,Xiao-feng HUANG. Visual object tracking based on policy gradient. Journal of ZheJiang University (Engineering Science), 2020, 54(10): 1923-1928.
Fig.3OPE result comparison on OTB benchmark dataset
设定
LaSOT结果
OTB100结果
平均速度/(帧·s?1)
DP
OP
DP
OP
Never update (Baseline)
42.5%
0.363
74.2%
0.567
67
Always update (Baseline)
38.1%
0.337
75.8%
0.571
50
Adaptive update without re-detection
40.8%
0.359
78.0%
0.587
46
Response map based
43.8%
0.366
77.8%
0.587
33
Weighted confidence margin map based
44.2%
0.368
78.5%
0.592
32
Tab.1Performance of proposed algorithm with different settings
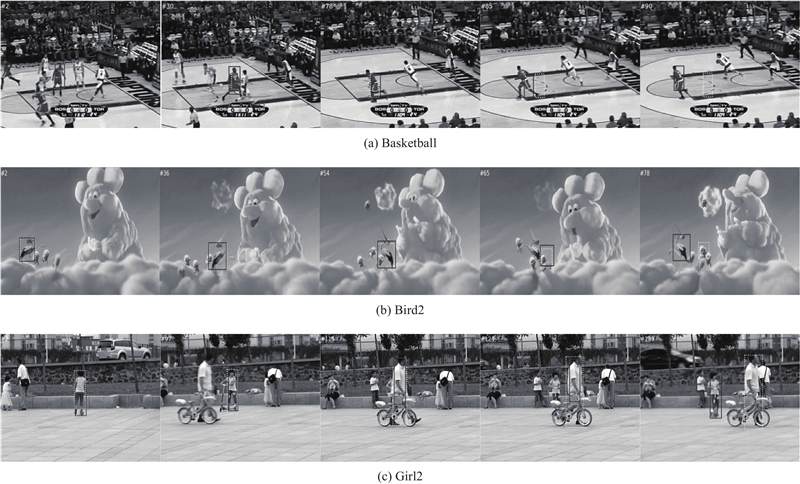
Fig.4Tracking results of video sequences
[1]
熊昌镇, 王润玲, 邹建成 基于多高斯相关滤波的实时跟踪算法[J]. 浙江大学学报: 工学版, 2019, 53 (8): 1488- 1495 XIONG Chang-zhen, WANG Run-ling, ZOU Jian-cheng Real time tracking algorithm based on multi Gaussian correlation filtering[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (8): 1488- 1495
[2]
WANG N, ZHOU W, LI H Reliable re-detection for long-term tracking[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2019, 29 (3): 730- 743
doi: 10.1109/TCSVT.2018.2816570
[3]
MA C, YANG X, ZHANG C, et al. Long-term correlation tracking [C]// Proceedings of CVPR. Boston: IEEE, 2015: 5388-5396.
[4]
BOLME D, BEVERIDGE J, DRAPER B, et al. Visual object tracking using adaptive correlation filters [C]// Proceedings of CVPR. San Francisco: IEEE, 2010: 2544-2550.
[5]
WANG M, LIU Y, HUANG Z. Large margin object tracking with circulant feature maps [C]// Proceedings of CVPR. Hawaii: IEEE, 2017: 4021-4029.
[6]
HUANG C, LUCEY S, RAMANAN D. Learning policies for adaptive tracking with deep feature cascades [C]// Proceedings of ICCV. Venice: IEEE, 2017: 105-114.
[7]
CHOI J, KWON J, LEE K Real-time visual tracking by deep reinforced decision making[J]. Computer Vision and Image Understanding, 2018, 171 (2): 10- 19
[8]
SUPANCIC J, RAMANAN D. Tracking as online decision-making: learning a policy from streaming videos with reinforce-ment learning [C]// Proceedings of ICCV. Venice: IEEE, 2017: 322-331.
[9]
BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional Siamese networks for object tracking [C]// Proceedings of ECCV. Amsterdam: Springer, 2016: 850–865.
[10]
HAUSKNECHT M, STONE P. Deep recurrent Q-learning for partially observable MDPs [C]// Proceedings of AAAI. Austin: Springer, 2015: 29-37.
[11]
BHAT G, JOHNANDER J, DANELLJAN M, et al. Unveiling the power of deep tracking [C]// Proceedings of ECCV. Munich: Springer, 2018: 483-498.
[12]
江宝安, 卢焕章 粒子滤波器及其在目标跟踪中的应用[J]. 雷达科学与技术, 2003, (3): 170- 174 JIANG Bao-an, LU Huan-zhang Particle filter and its application in object tracking[J]. Radar Science and Technology, 2003, (3): 170- 174
doi: 10.3969/j.issn.1672-2337.2003.03.010
[13]
FAN H, LIN L, YANG F, et al. LaSOT: a high-quality benchmark for large-scale single object tracking [C]// Proceedings of CVPR. Long Beach: IEEE, 2019: 5374-5383.
[14]
WU Y, LIM J, YANG M. Online object tracking: a benchmark [C]// Proceedings of CVPR. Portland: IEEE, 2013: 2411-2418.
[15]
HENRIQUES J, CASEIRO R, MARTINS P, et al High speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (3): 583- 596
doi: 10.1109/TPAMI.2014.2345390
[16]
DANELLJAN M, HAGER G, KHAN F, et al. Accurate scale estimation for robust visual tracking [C]// Proceedings of British Machine Vision Conference. Nottingham: BMVA, 2014: 1–11.
[17]
LI Y, ZHU J. A scale adaptive kernel correlation filter tracker with feature integration [C]// Proceedings of ECCV. Heidelberg: Springer, 2014: 254–265.