Front. Inform. Technol. Electron. Eng.
2016, 17 (
):
55-66.
(1392KB)
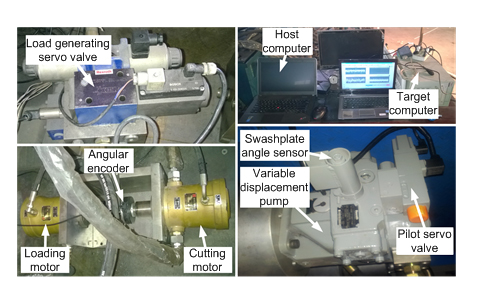
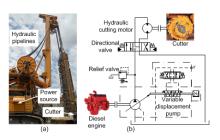
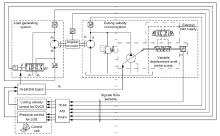
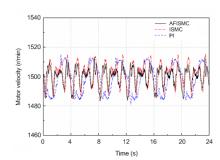
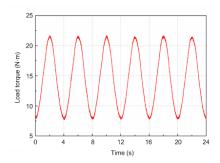
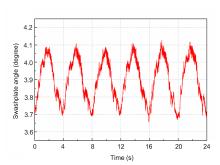
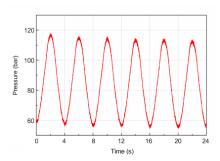
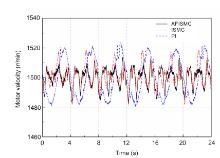
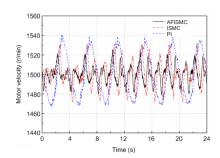
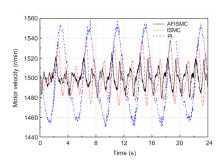
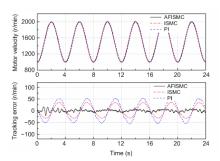
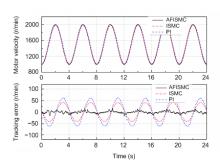
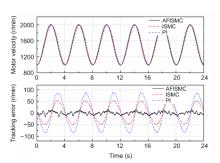
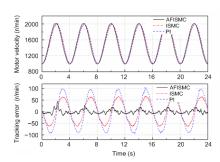
This paper presents a velocity controller for the cutting system of a trench cutter (TC). The cutting velocity of a cutting system is affected by the unknown load characteristics of rock and soil. In addition, geological conditions vary with time. Due to the complex load characteristics of rock and soil, the cutting load torque of a cutter is related to the geological conditions and the feeding velocity of the cutter. Moreover, a cutter’s dynamic model is subjected to uncertainties with unknown effects on its function. In this study, to deal with the particular characteristics of a cutting system, a novel adaptive fuzzy integral sliding mode control (AFISMC) is designed for controlling cutting velocity. The model combines the robust characteristics of an integral sliding mode controller with the adaptive adjusting characteristics of an adaptive fuzzy controller. The AFISMC cutting velocity controller is synthesized using the backstepping technique. The stability of the whole system including the fuzzy inference system, integral sliding mode controller, and the cutting system is proven using the Lyapunov theory. Experiments have been conducted on a TC test bench with the AFISMC under different operating conditions. The experimental results demonstrate that the proposed AFISMC cutting velocity controller gives a superior and robust velocity tracking performance.

{kind=link}