本文链接 :https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2024.03.216
近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注。通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等。折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计。Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成。Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载。杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性。Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手。
传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力。若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] 。为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手。Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取。Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性。Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务。Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体。Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体。
然而,上述机器人手仍无法实现完全不依赖于驱动器提供的扭矩或力。为此,本文提出了一种基于折纸的被动触发双稳态机器人手。该机器人手的核心结构为基于折纸的单自由度抓握机构和具有双稳态特性的驱动机构,其可通过调整扭转弹簧的刚度参数实现对能量壁垒的灵活调整。首先,通过对抓握机构和驱动机构进行运动学建模,开展机器人手结构设计。然后,搭建机器人手样机并开展跌落捕获实验,以验证所设计机器人手的双稳态特性及抓握性能,旨在为后续机器人手的设计提供新思路。
1 基于折纸的抓握机构设计与运动学分析
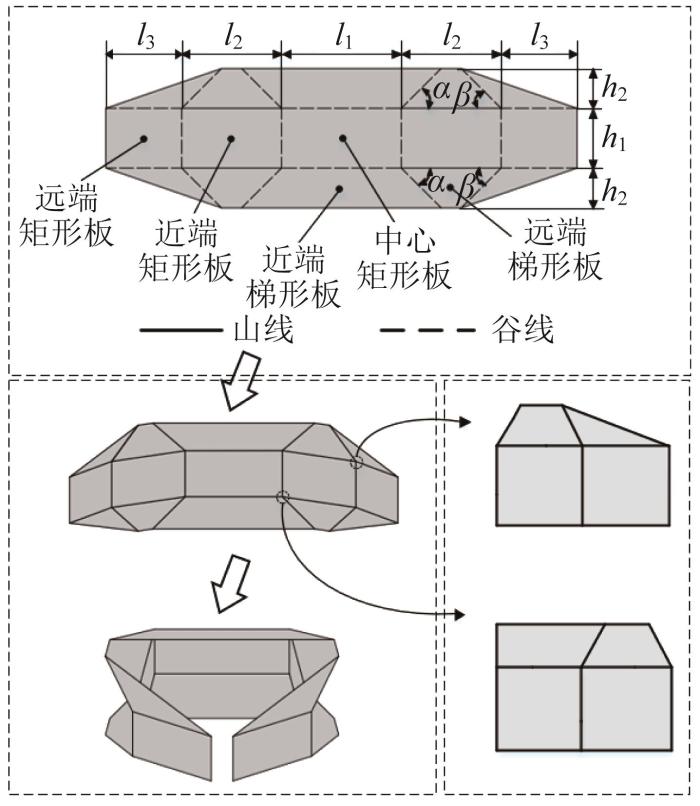
本文基于钻石折纸图案[24 -25 ] 提出了一种高度对称且具有抓握运动功能的单自由度折纸图案,如图1 所示。抓握折纸图案由5块矩形板、6块梯形板和4块三角形板组成。其中,矩形板可充当机器人手的手掌和指段,梯形板和三角形板起传动作用;与中心矩形板连接的为近端梯形板,与近端矩形板连接的为远端梯形板。在本文中,将中心矩形板视为机器人手的手掌,将近端矩形板和远端矩形板分别视为机器人手的第一指段和第二指段。图1 中:l 1 l 2 l 3 h 1 h 2 α β α , β ∈ 0 , π / 2
图1
图1
抓握折纸图案示意
Fig.1
Schematic of grasping origami pattern
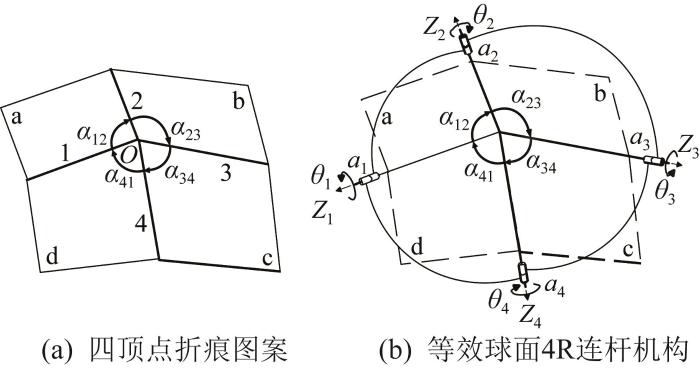
本文所提出的抓握折纸图案为四顶点折痕图案,其运动学模型可通过D-H法[26 -28 ] 来构建。一般情况下,四顶点折痕图案包括4个面板(标记为a,b,c,d)和4条折痕(标记为1,2,3,4);4条折痕在公共点O 处相交,如图2 (a)所示。其中,相邻折痕之间的扇形角分别为α 12 α 23 α 34 α 41 图2 (b)所示。
图2
图2
四顶点折痕图案及其等效球面4R 连杆机构
Fig.2
Four-vertex crease pattern and its equivalent spherical 4R linkage mechanism
如图2 所示,在等效球面4R连杆机构中,以公共点O 为原点,建立坐标系O - X i Z i Z i i X i i -1与转动关节i Z α i ( i + 1 ) Z i Z i + 1 i 的扭转角),沿X i + 1 θ i X i - 1 X i i 的旋转角),沿Z i a i ( i + 1 ) d i 满足 a 12 = a 23 = a 34 = a 41 = 0 d 1 = d 2 = d 3 = d 4 = 0
R 12 R 23 R 34 R 41 = I
R i ( i + 1 ) = c o s θ i s i n θ i 0 - c o s α i ( i + 1 ) s i n θ i c o s α i ( i + 1 ) c o s θ i s i n α i ( i + 1 ) s i n α i ( i + 1 ) s i n θ i - s i n α i ( i + 1 ) s i n θ i c o s α i ( i + 1 )
式中: I R i ( i + 1 )
由此可知,相邻关节的旋转角θ i θ i + 1
c o s θ i s i n α i ( i + 1 ) c o s α ( i + 1 ) ( i + 2 ) s i n α ( i + 3 ) ( i + 4 ) + c o s θ i + 1 s i n α i ( i + 1 ) s i n α ( i + 1 ) ( i + 2 ) c o s α ( i + 3 ) ( i + 4 ) + c o s θ i c o s θ i + 1 c o s α i ( i + 1 ) s i n α ( i + 1 ) ( i + 2 ) s i n α ( i + 3 ) ( i + 4 ) - c o s α i ( i + 1 ) c o s α ( i + 1 ) ( i + 2 ) c o s α ( i + 3 ) ( i + 4 ) - s i n θ i s i n θ i + 1 s i n α ( i + 1 ) ( i + 2 ) s i n α ( i + 3 ) ( i + 4 ) + c o s α ( i + 2 ) ( i + 3 ) = 0
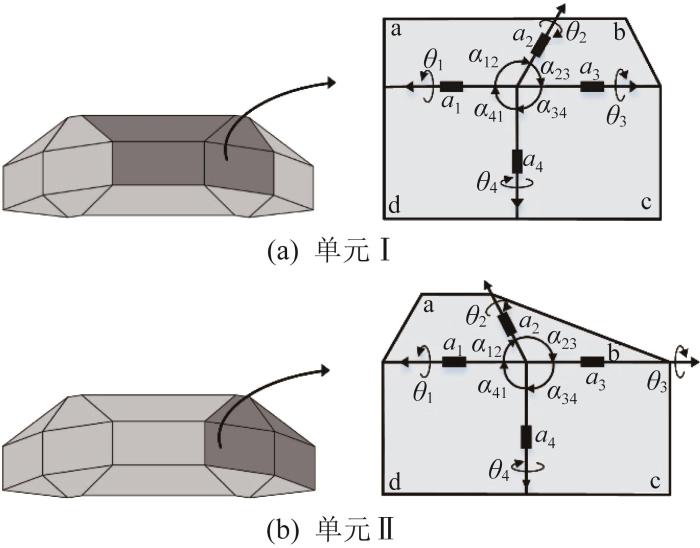
图1 所示的抓握折纸图案包含2种类型的四顶点折痕图案。将由中心矩形板、近端矩形板、近端梯形板和远端梯形板组成的四顶点折痕图案称为单元I;将由近端矩形板、远端矩形板、远端梯形板和三角形板组成的四顶点折痕图案称为单元II。这2种四顶点折痕图案的等效球面4R连杆机构如图3 所示。
图3
图3
抓握折纸图案的等效球面4R 连杆机构
Fig.3
Equivalent spherical 4R linkage mechanism of grasping origami pattern
根据面板的几何形状,抓握折纸图案的2种等效连杆机构存在以下关系:
α 12 Ⅰ = π - α α 23 Ⅰ = α α 34 Ⅰ = α 41 Ⅰ = π 2
α 12 Ⅱ = β α 23 Ⅱ = π - β α 34 Ⅱ = α 41 Ⅱ = π 2
式中:α ⅈ ⅈ + 1 I a ⅈ ⅈ + 1 I I
将式(4)代入式(3),得到单元I中各关节旋转角θ i I
c o s θ 1 Ⅰ = 2 s i n 2 α c o s 2 θ 2 Ⅰ 2 - 1 t a n θ 3 Ⅰ = - c o s α c o t θ 2 Ⅰ 2 s i n θ 4 Ⅰ = c o s θ 2 Ⅰ s i n θ 3 Ⅰ - c o s α s i n θ 3 Ⅰ s i n θ 2 Ⅰ
同理,将式(5)代入式(3),得到单元II中各关节旋转角θ ⅈ I I
c o s θ 1 Ⅱ = 2 s i n 2 β c o s 2 θ 2 Ⅱ 2 - 1 t a n θ 3 Ⅱ = - c o s β c o t θ 2 Ⅱ 2 s i n θ 4 Ⅱ = c o s θ 2 Ⅱ s i n θ 3 Ⅱ - c o s α s i n θ 3 Ⅱ s i n θ 2 Ⅱ
研究表明,双球面4R连杆机构装配体的运动为单自由度[29 ] 。假设θ 2 I a 3 I a 1 I I 式(6)和式(7),可得基于折纸的抓握机构的运动学方程:
c o s θ 1 Ⅰ = 2 s i n 2 α c o s 2 θ 2 Ⅰ 2 - 1 t a n θ 3 Ⅰ = t a n θ 1 Ⅱ = - c o s α c o t θ 2 Ⅰ 2 s i n θ 4 Ⅰ = c o s θ 2 Ⅰ s i n θ 3 Ⅰ - c o s α s i n θ 3 Ⅰ s i n θ 2 Ⅰ c o t θ 2 Ⅱ 2 = c o s α c o s β c o t θ 2 Ⅰ 2 t a n θ 3 Ⅱ = - c o s β c o t θ 2 Ⅱ 2 s i n θ 4 Ⅱ = c o s θ 2 Ⅱ s i n θ 3 Ⅱ - c o s α s i n θ 3 Ⅱ s i n θ 2 Ⅱ
由于面板与面板之间无法互相穿透,因此关节旋转角θ i ∈ [ - π , π ] θ i ∈ [ 0 , π ] a i θ i ∈ [ - π , 0 ] a i φ i θ i θ i ∈ [ 0 , π ] θ i = π - φ i θ i ∈ [ - π , 0 ] θ i = π + φ i 图1 所示抓握折纸图案中山线与谷线的分布情况,可得到基于折纸的抓握机构中二面角的关系式:
c o s φ 1 Ⅰ = 1 - 2 s i n 2 α s i n 2 φ 2 Ⅰ 2 t a n φ 3 Ⅰ = t a n φ 1 Ⅱ = - c o s α t a n φ 2 Ⅰ 2 s i n φ 4 Ⅰ = c o s α s i n φ 2 Ⅰ s i n φ 3 Ⅰ - s i n φ 3 Ⅰ c o s φ 2 Ⅰ t a n φ 2 Ⅱ 2 = c o s α c o s β t a n φ 2 Ⅰ 2 c o s φ 3 Ⅱ = 1 - 2 s i n 2 α s i n 2 φ 2 Ⅱ 2 s i n φ 4 Ⅱ = c o s α s i n φ 2 Ⅱ s i n φ 3 Ⅱ - s i n φ 2 Ⅱ c o s φ 3 Ⅱ
2 双稳态驱动机构设计与运动学分析
2.1 基于Sarrus 机构的驱动机构设计
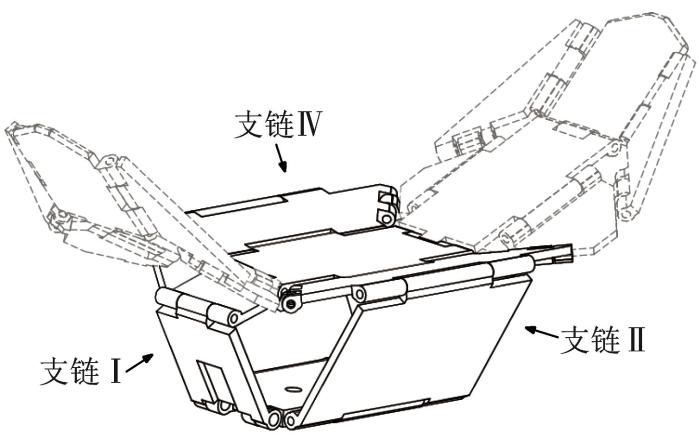
为保证能够均匀地分配驱动力,考虑到抓握机构的对称性,驱动机构同样保持对称性。为此,采用四支链的Sarrus机构作为机器人手抓握机构的驱动机构。驱动机构与抓握机构共用1块中心矩形板和2块近端梯形板,如图4 所示。根据Sarrus机构的特性[30 ] ,当下平台板固定时,上平台板作直线运动,则近端矩形板与上平台板之间的角度相应改变,从而带动抓握机构作抓握运动。
图4
图4
抓握运动的驱动机构
Fig.4
Driving mechanism for grasping motion
2.2 驱动机构中支链I 和支链III 的运动学分析
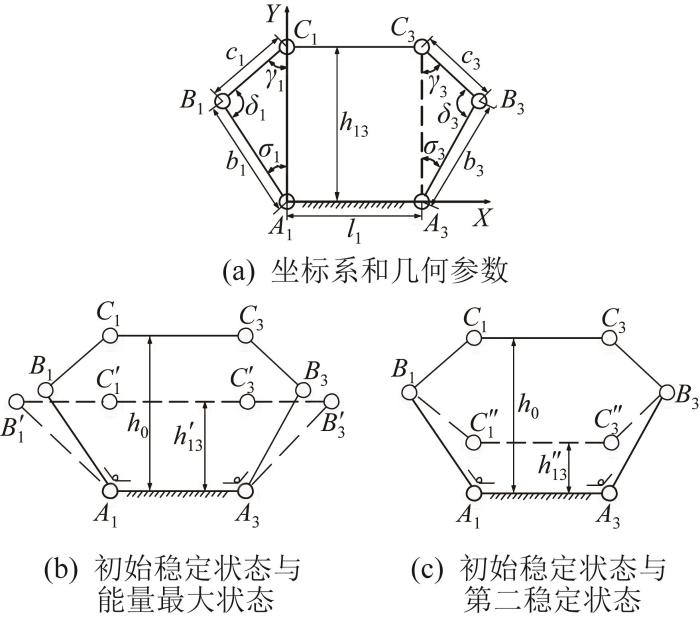
考虑到驱动机构包含2种连杆参数不同的支链,对每种支链进行独立的运动学分析。对于支链I和支链III,以铰链A 1 为原点建立坐标系,如图5 所示。
图5
图5
驱动机构中支链I 和支链III 的运动简图
Fig.5
Kinematic diagram of limb Ⅰ and limb Ⅲ in driving mechanism
为方便推导,假定下平台板A 1 A 3 C 1 C 3 A 1 A 3 = C 1 C 3 = l 1 A 1 B 1 = A 3 B 3 = b 1 = b 3 B 1 C 1 = B 3 C 3 = c 1 = c 3 A 1 C 1 = A 3 C 3 = h 13 A 1 = ( 0 , 0 ) B 1 = ( - b 1 s i n σ 1 , b 1 c o s σ 1 ) C 1 = ( 0 , b 1 c o s σ 1 + c 1 c o s γ 1 ) A 3 = ( l 1 , 0 ) B 3 = ( l 1 + b 3 s i n σ 3 , b 3 c o s σ 3 ) C 3 = ( l 1 , b 3 c o s σ 3 + c 3 c o s γ 3 ) σ 1 、 σ 3 γ 1 、 γ 3 A 1 B 1 、A 3 B 3 、B 1 C 1 、B 3 C 3 与Y 方向的夹角。根据余弦定理,可得:
σ 1 = σ 3 = a r c c o s b 1 2 + h 13 2 - c 1 2 2 b 1 h 13 = a r c c o s b 3 2 + h 13 2 - c 3 2 2 b 3 h 13 γ 1 = γ 3 = a r c c o s c 1 2 + h 13 2 - b 1 2 2 c 1 h 13 = a r c c o s c 3 2 + h 13 2 - b 3 2 2 c 3 h 13 (10)
假设上平台板与下平台板的距离h 13 = h 0 C 1 C 3 [31 ] 。本文在铰链A 1 A 3 k E m i n = 0
当扭转弹簧变形时,支链I和支链III的弹性势能E 可表示为:
E = 1 2 k Δ σ 1 2 + 1 2 k Δ σ 3 2 = k a r c c o s b 1 2 + h 13 2 - c 1 2 2 b 1 h 13 - a r c c o s b 1 2 + h 0 2 - c 1 2 2 b 1 h 0 (11)
当作用在驱动机构上平台板C 1 C 3 σ 1 σ 3 C 1 C 3 B 1 C 1 B 3 C 3
E m a x = k a r c c o s b 1 2 + h 0 - c 1 c o s γ 10 2 - c 1 2 2 b 1 h 0 - c 1 c o s γ 10 - k a r c c o s b 1 2 + h 0 2 - c 1 2 2 b 1 h 0 (12)
式中:γ 10 表示初始稳定状态下B 1 C 1 与Y 方向的夹角。
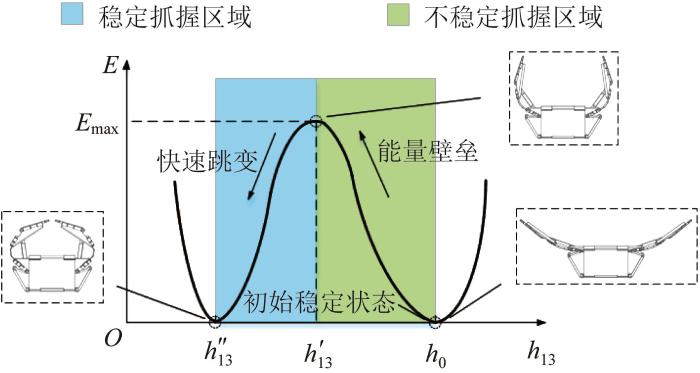
若上平台板C 1 C 3 σ 1 σ 3 h 13 = h 0 - 2 c 1 c o s γ 10 E 与驱动机构上、下平台板的距离h 13 图6 所示。由图可知,在h 13 < h 13 '
图6
图6
支链I 和支链III 的弹性势能变化曲线
Fig.6
Variation curve of elastic energy of limb Ⅰ and limb Ⅲ
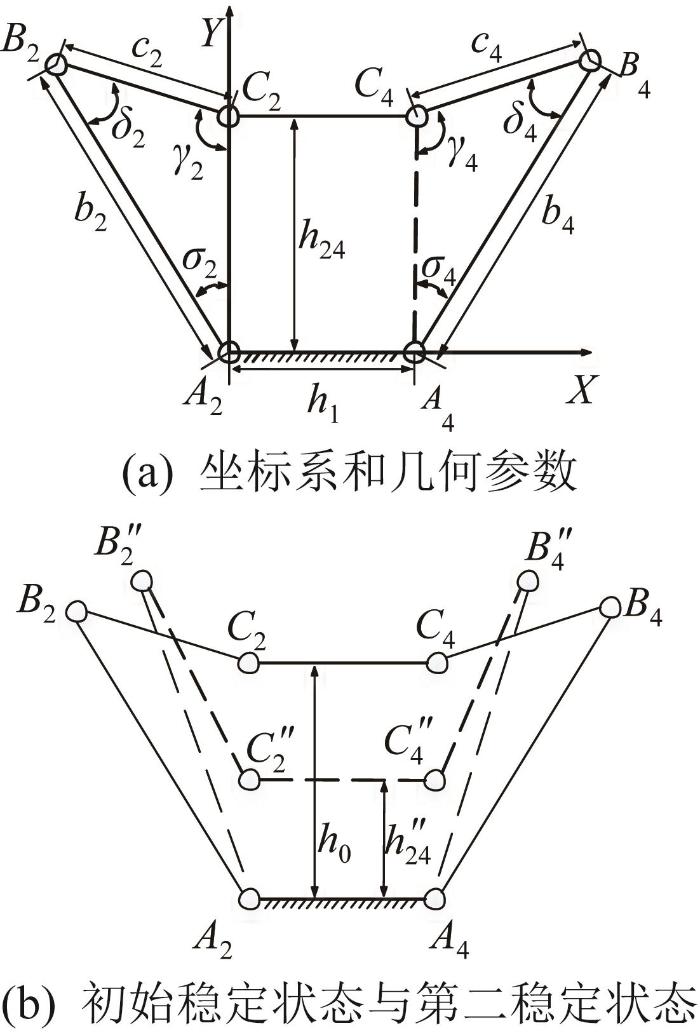
2.3 驱动机构中支链II 和支链IV 的运动学分析
同理,对驱动机构的支链II和支链IV进行运动学分析,如图7 所示。
图7
图7
驱动机构中支链II 和支链IV 的运动简图
Fig.7
Kinematic diagram of limb Ⅱ and limb Ⅳ in driving mechanism
根据2.2节的推导过程,可以观察到上平台板C 1 C 3 2 c 1 c o s γ 1 C 2 C 4 C 1 C 3
Δ h 24 = Δ h 13 = 2 c 1 c o s γ 10 (13)
由此可得到支链II和支链IV对应的2个零能量状态的角度:
γ 20 = γ 40 = a r c c o s c 2 2 + h 0 2 - b 2 2 2 c 2 h 0 γ 2 ″ = γ 4 ″ = a r c c o s c 2 2 + h 0 - Δ h 24 2 - b 2 2 2 c 2 h 0 - Δ h 24 2 (14)
驱动机构与抓握机构共用结构,故支链II和支链IV中的γ 2 γ 4
3 机器人手的结构参数确定
为实现机器人手良好的抓握性能,需确定其结构参数,具体步骤如下。
步骤1 确定参数α β α β α = β = 45 °
步骤2 确定参数l 1 l 2 l 3 h 1 h 2 l 1 l 2 l 3 h 1 h 2 l 1 = 60 m m l 2 = 50 m m l 3 = 38 m m h 1 = 30 m m h 2 = 20 m m
步骤3 确定零能量状态下的φ 1 I φ 1 I φ 1 I φ 1 I φ 1 I = 170 ° φ 1 I = 120 ° γ 20 = γ 40 = 100 ° γ 1 ″ = γ 4 ″ = 150 °
步骤4 确定参数b 2 b 4 h 24 ' h 0 b 2 b 4 b 2 = b 4 = 40 m m b 2 b 4 h 2 式(14)可得:h 0 = 31.31 m m h 24 ″ = 21.41 m m
步骤5 确定参数σ 1 σ 3 σ 1 σ 3 σ 10 = σ 30 = 30 °
c o s σ 10 = ( h 0 - h 13 ' ) / 2 + h 13 ' b 1 c o s σ 10 = b 1 2 + h 0 2 - c 1 2 2 b 1 h 0
将h 0 σ 1 式(15),解得b 1 = 30.46 m m c 1 = 16.02 m m
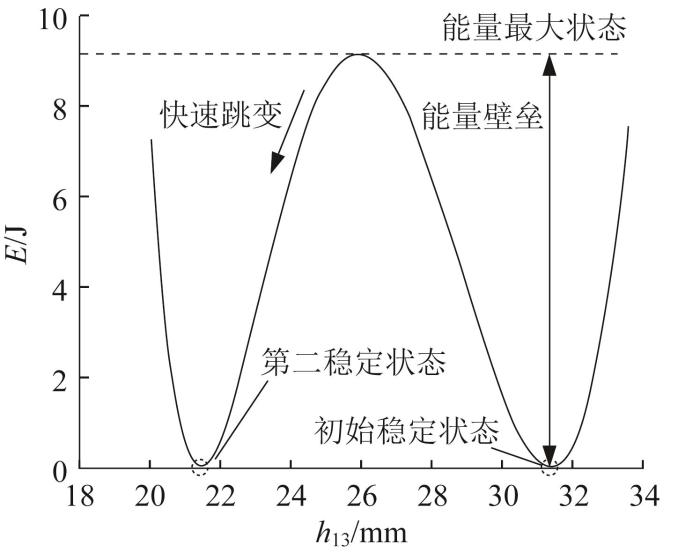
步骤6 根据能量最大状态和零能量状态之间的能量壁垒,确定扭转弹簧的刚度。本文将能量壁垒设置为9 J,将所有已知参数代入式(11),可得扭转弹簧刚度k =298 Nm/rad。
在该设计案例下,机器人手的弹性势能E 与驱动机构上、下平台板的距离h 13 的关系如图8 所示。
图8
图8
设计案例中机器人手弹性势能的变化曲线
Fig.8
Variation curve of elastic energy of robotic hand in the design case
4 机器人手样机制作及实验测试
4.1 机器人手样机制作
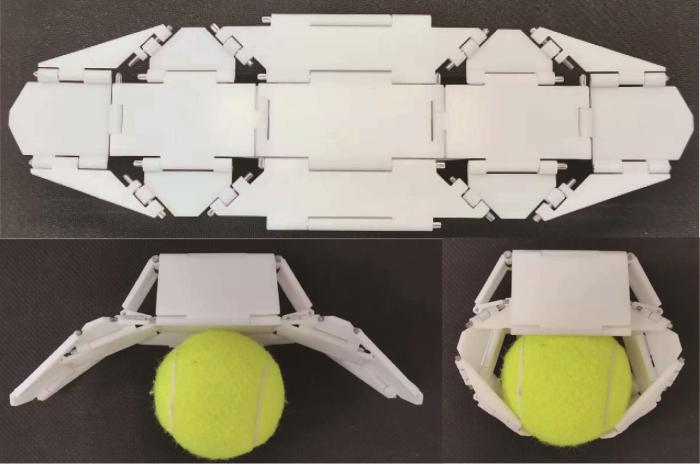
基于上述设计方案,制作双稳态机器人手样机,如图9 所示。其中:抓握机构和驱动机构的面板采用3D打印方式制作,材料为光敏树脂,厚度为3~4 mm;相邻面板通过刚性铰链连接。安装在驱动机构中的弹簧为圈数为3、线径为1 mm、内径为4 mm的扭转弹簧,其刚度为282 Nm/rad。扭转弹簧的初始角度为120°,这决定了机器人手初始稳定状态对应的位置。双稳态机器人手的完全伸展尺寸为231 mm×74 mm×35 mm。在初始稳定状态和第二稳定状态下,机器人手的尺寸分别为195 mm×72 mm×76 mm和101 mm×52 mm×88 mm。
图9
图9
双稳态机器人手样机
Fig.9
Bistable robotic hand prototype
4.2 跌落捕获实验
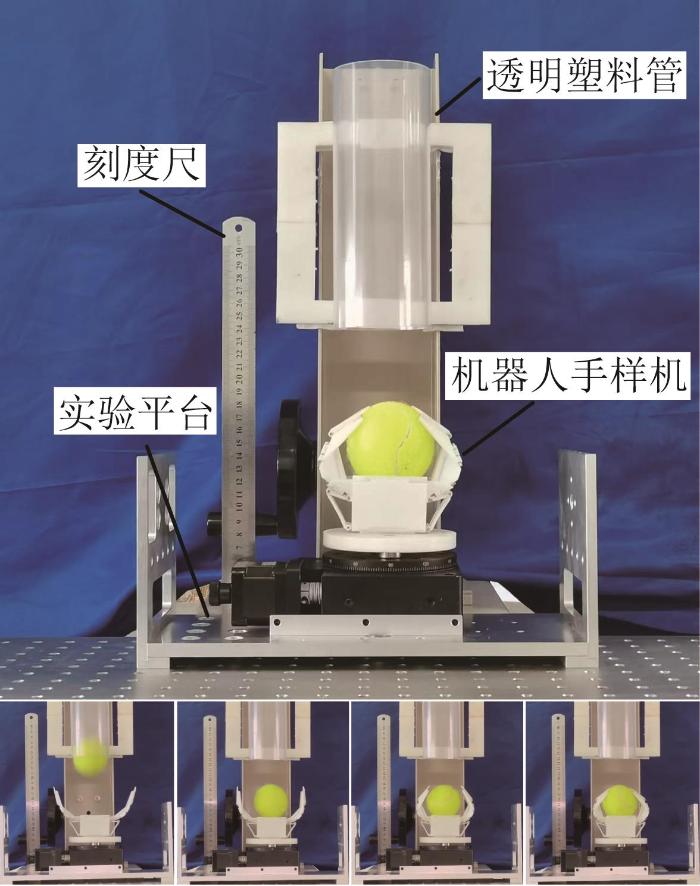
为验证所设计机器人手的抓握性能,开展跌落捕获实验,实验装置如图10 所示。在机器人手样机顶部安装1根内径为67 mm、长度为200 mm的透明塑料管,其下端相对于机器人手的高度可自由调节。同时,在机器人手样机的前面安装1台摄像机,用于观察机器人手的抓握动作。跌落的物体为质量为57.7 g、直径为65 mm的网球。网球在透明塑料管顶部释放,在自由落体运动后击中机器人手。
图10
图10
双稳态机器人手跌落捕获实验装置
Fig.10
Drop capture experimental device for bistable robotic hand
分别在跌落高度为400,440,480 mm时开展跌落捕获实验。实验结果显示:当跌落高度为400 mm时,机器人手的抓握运动没有被触发;当跌落高度为440 mm时,机器人手成功抓握目标网球;当跌落高度为480 mm时,机器人手的抓握运动虽被触发,但未能抓住网球。由此可知,机器人手的抓握运动是由冲击动能触发的。若物体跌落高度低于对应能量壁垒的高度阈值,则无法触发机器人手的抓握运动。此外,若冲击动能过大,则机器人手的抓握运动无法抵抗物体的反弹。跌落捕获实验结果验证了所设计的机器人手在有限撞击范围内抓取目标物体的可行性,证明了基于能量壁垒的可调性实现自适应抓取的潜力。
5 结 论
本文设计了一种基于折纸的被动触发双稳态机器人手,其能够在无外部驱动器的情况下稳定抓取特定大小的物体。首先,提出并分析了基于折纸的单自由度抓握机构。其次,根据机器人手抓握机构的特点,对其驱动机构进行了设计和分析,并引入了双稳态特性。最后,制作机器人手样机并开展了3种不同高度下的跌落捕获实验,验证了所设计的机器人手的双稳态特性和抓握性能。结果表明,本文所设计的机器人手的双稳态特性可通过调整扭转弹簧的刚度参数来灵活调节,并可针对特定的抓握任务进行设计,这在被动式和自适应机器人中具有潜在应用前景。基于折纸的被动触发双稳态机器人手要想实现更加稳定可靠的抓握运动,后续还应进一步研究抓握物体时所需突破的能量壁垒的大小与突破稳定抓取能量之间的比例。
参考文献
View Option
[1]
苏靖惟 ,张文增 单链传动双齿条平夹间接自适应机器人手研制
[J].机械传动 ,2019 ,43 (2 ):154 -161 .
[本文引用: 1]
SU J W ZHANG W Z Development of a parallel and indirectly self-adaptive robot hand with single-chain transmission of double-rack mechanism
[J]. Journal of Mechanical Transmission , 2019 , 43 (2 ): 154 -161 .
[本文引用: 1]
[2]
马涛 ,杨冬 ,赵海文 ,等 一种新型欠驱动机械手爪的抓取分析和优化设计
[J].机器人 ,2020 ,42 (3 ):354 -364 .
[本文引用: 1]
MA T YANG D ZHAO H W et al Grasp analysis and optimal design of a new underactuated manipulator
[J]. Robot , 2020 , 42 (3 ): 354 -364 .
[本文引用: 1]
[3]
CHEN W R XIONG C H WANG Y N Analysis and synthesis of underactuated compliant mechanisms based on transmission properties of motion and force
[J]. IEEE Transactions on Robotics , 2020 , 36 (3 ): 773 -788 .
[本文引用: 1]
[5]
TOWNSEND W The BarrettHand grasper-programmably flexible part handling and assembly
[J]. Industrial Robot , 2000 , 27 (3 ): 181 -188 .
[本文引用: 1]
[6]
LI G X ZHANG C ZHANG W Z et al Coupled and self-adaptive under-actuated finger with a novel S-coupled and secondly self-adaptive mechanism
[J]. Journal of Mechanisms and Robotics , 2014 , 6 (4 ): 041010 .
[7]
梁达尧 ,张文增 平夹自适应欠驱动手的参数优化与稳定性分析
[J].机器人 ,2017 ,39 (3 ):282 -291 .
[本文引用: 1]
LIANG D Y ZHANG W Z Parameters optimization and stability analysis for a parallel and self-adaptive underactuated hand
[J]. Robot , 2017 , 39 (3 ): 282 -291 .
[本文引用: 1]
[8]
PIAZZA C GRIOLI G CATALANO M et al A century of robotic hands
[J]. Annual Review of Control, Robotics, and Autonomous Systems , 2019 , 2 (1 ): 1 -32 .
[本文引用: 1]
[9]
TEOH Z E PHILLIPS B T BECKER K P et al Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms
[J]. Science Robotics , 2018 , 3 (20 ): eaat5276 .
[10]
[本文引用: 1]
WU L C KONG Y X LI X L Fully rotational joint underactuated finger mechanism and its kinematics analysis
[J]. Journal of Mechanical Engineering , 2017 , 53 (1 ): 47 -54 .
DOI:10.3901/jme.2017.01.047
[本文引用: 1]
[11]
EDMONDSON B J BOWEN L A GRAMES C L et al Oriceps: origami-inspired forceps
[C]//ASME 2013 Conference on Smart Materials, Adaptive Structures and Intelligent Systems . Snowbird, Utah, Sep . 16 -18 , 2013 .
[本文引用: 1]
[12]
MINTCHEV S SHINTAKE J FLOREANO D Bioinspired dual-stiffness origami
[J]. Science Robotics , 2018 , 3 (20 ): eaau0275 .
[本文引用: 1]
[13]
[本文引用: 1]
YANG M Y MA J Y LI J M et al Thick-panel origami inspired forceps for minimally invasive surgery
[J]. Journal of Mechanical Engineering , 2018 , 54 (17 ): 36 -45 .
DOI:10.3901/jme.2018.17.036
[本文引用: 1]
[14]
KAMRAVA S MOUSANEZHAD D FELTON S M et al Programmable origami strings
[J]. Advanced Materials Technologies , 2018 , 3 (3 ): 1700276 .
[本文引用: 1]
[15]
SHEPHERD R F ILIEVSKI F CHOI W et al Multigait soft robot
[J]. PNAS , 2011 , 108 (51 ): 20400 -20403 .
[本文引用: 1]
[16]
MARCHESE A D KATZSCHMANN R K RUS D A recipe for soft fluidic elastomer robots
[J]. Soft Robotics , 2015 , 2 (1 ): 7 -25 .
[17]
HINES L PETERSEN K LUM G Z et al Soft actuators for small-scale robotics
[J]. Advanced Materials , 2017 , 29 (13 ): 1603483 .
[本文引用: 1]
[18]
YASUDA H JOHNSON K ARROYOS V et al Leaf-like origami with bistability for self-adaptive grasping motions
[J]. Soft Robotics , 2022 , 9 (5 ): 938 -947 .
[本文引用: 1]
[19]
JIANG Y K LI Y T LIU K et al Ultra-tunable bistable structures for universal robotic applications
[J]. Cell Reports Physical Science , 2023 , 4 (5 ): 101365 .
[本文引用: 1]
[20]
LIN Y ZHANG C TANG W et al A bioinspired stress-response strategy for high-speed soft grippers
[J]. Advanced Science , 2021 , 8 (21 ): 2102539 .
[本文引用: 1]
[21]
ZHANG Y ZHANG W GAO P et al Finger-palm synergistic soft gripper for dynamic capture via energy harvesting and dissipation
[J]. Nature Communications , 2022 , 13 (1 ): 7700 .
[本文引用: 1]
[22]
ARRIETA A F ROJAS S BOSTON D M Actuation simplification for grippers based on bioinspired spring origami
[C]//Bioinspiration, Biomimetics, and Bioreplication IX . Denver, Mar . 3 -7 , 2019 .
[本文引用: 1]
[23]
FABER J A ARRIETA A F STUDART A R Bioinspired spring origami
[J]. Science , 2018 , 359 (6382 ): 1386 -1391 .
[本文引用: 1]
[24]
MA J Y CHAI S B CHEN Y Geometric design, deformation mode, and energy absorption of patterned thin-walled structures
[J]. Mechanics of Materials , 2022 , 168 : 104269 .
[本文引用: 1]
[25]
MELONI M CAI J G ZHANG Q et al Engineering origami: a comprehensive review of recent applications, design methods, and tools
[J]. Advanced Science , 2021 , 8 (13 ): 2000636 .
[本文引用: 1]
[26]
HUANG L ZENG P YIN L R et al Design and kinematic analysis of a rigid-origami-based underwater sampler with deploying-encircling motion
[J]. Mechanism and Machine Theory , 2022 , 174 : 104886 .
[本文引用: 1]
[27]
LIU B LIAO Y M YANG Y W et al Design and analysis of reconfigurable and deployable thin-walled architectural equipment inspired by Mirror-Miura origami patterns
[J]. Engineering Structures , 2023 , 286 : 116059 .
[28]
CHEN Y FENG H J MA J Y et al Symmetric waterbomb origami
[J]. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , 2016 , 472 (2190 ): 20150846 .
[本文引用: 1]
[29]
ZHANG X CHEN Y Vertex-splitting on a diamond origami pattern
[J]. Journal of Mechanisms and Robotics , 2019 , 11 (3 ): 031014 .
[本文引用: 1]
[30]
CHEN G M ZHANG S Y LI G Multistable behaviors of compliant sarrus mechanisms
[J]. Journal of Mechanisms and Robotics , 2013 , 5 (2 ): 021005 .
[本文引用: 1]
[31]
LI Q Q ZHAN L Y HU L et al A negative stiffness structure with multi-stable characteristic
[J]. Composite Structures , 2023 , 308 : 116715 .
[本文引用: 1]
单链传动双齿条平夹间接自适应机器人手研制
1
2019
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
单链传动双齿条平夹间接自适应机器人手研制
1
2019
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
一种新型欠驱动机械手爪的抓取分析和优化设计
1
2020
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
一种新型欠驱动机械手爪的抓取分析和优化设计
1
2020
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Analysis and synthesis of underactuated compliant mechanisms based on transmission properties of motion and force
1
2020
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
变胞三指灵巧手的运动分析与控制系统设计
1
2018
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
变胞三指灵巧手的运动分析与控制系统设计
1
2018
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
The BarrettHand grasper-programmably flexible part handling and assembly
1
2000
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Coupled and self-adaptive under-actuated finger with a novel S-coupled and secondly self-adaptive mechanism
0
2014
平夹自适应欠驱动手的参数优化与稳定性分析
1
2017
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
平夹自适应欠驱动手的参数优化与稳定性分析
1
2017
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
A century of robotic hands
1
2019
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms
0
2018
全转动关节欠驱动手指机构及其运动学分析
1
2017
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
全转动关节欠驱动手指机构及其运动学分析
1
2017
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Oriceps: origami-inspired forceps
1
2013
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Bioinspired dual-stiffness origami
1
2018
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
基于厚板折纸理论的微创手术钳
1
2018
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
基于厚板折纸理论的微创手术钳
1
2018
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Programmable origami strings
1
2018
... 近年来,机器人手因具有优异的灵巧性和适应性,受到了国内外学者的广泛关注.通常情况下,机器人手具有多段指节[1 -2 ] ,其传统的传动方式包括肌腱传动[3 -4 ] 、齿轮传动[5 -7 ] 和连杆传动[8 -10 ] 等.折纸结构沿折痕和面板的分布路线具有力传动的优异特点,目前已有许多学者将其应用于机器人手的设计.Edmondson等[11 ] 设计了一种用于医疗手术的新型折纸机器人手,该机器人手通过切割和折叠扁平材料制作而成.Mintchev等[12 ] 提出了一种具有单自由度的两指折纸机器人手,该机器人手具有可变刚度特性,可避免被夹持物体过载.杨名远等[13 ] 基于厚板折纸理论设计了一种用于微创手术的新型手术钳,可提供传统手术钳1.5倍的夹持力,且具有较大的张角和较好的运动协调性.Kamrava等[14 ] 提出了一种用细长折纸带实现复杂配置的方法,并基于该方法设计了一种单自由度五指机器人手. ...
Multigait soft robot
1
2011
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
A recipe for soft fluidic elastomer robots
0
2015
Soft actuators for small-scale robotics
1
2017
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
Leaf-like origami with bistability for self-adaptive grasping motions
1
2022
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
Ultra-tunable bistable structures for universal robotic applications
1
2023
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
A bioinspired stress-response strategy for high-speed soft grippers
1
2021
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
Finger-palm synergistic soft gripper for dynamic capture via energy harvesting and dissipation
1
2022
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
Actuation simplification for grippers based on bioinspired spring origami
1
2019
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
Bioinspired spring origami
1
2018
... 传统的机器人手通常需要驱动器在抓握状态下持续地提供扭矩或力.若驱动器失效,则机器人手无法稳定地抓住物体[15 -17 ] .为避免这一限制并确保机器人手的操作安全性,有必要设计一种不依赖驱动器就能保持稳定抓握状态的机器人手.Yasuda等[18 ] 设计了一种新型叶状折纸机器人手并展示了其抓握动作,该机器人手独特的双稳态能量景观设计,使得其抓握运动可通过高可调性的方式触发,从而实现无驱动作用下的物体抓取.Jiang等[19 ] 提出了一种可调节的双稳态机器人手,其触发力可调节至最大抓取力的0.1%,高度可调的力触发能力使得该机器人手的提升重量超过其自身重量的107倍,由此验证了双稳态结构设计的可行性.Lin等[20 ] 受到应力响应策略的启发,提出了一种仿蜘蛛的气动软体夹持器,该夹持器能够完成高速动态抓握任务.Zhang等[21 ] 提出了一种结合腱绳驱动和气压驱动的软体机器人手,该机器人手具有快速收集能量和耗散能量的特性,能够在30 ms内获取和耗散几乎所有的目标动能,从而可靠地抓取高速运动的目标物体.Arrieta等[22 ] 、Faber等[23 ] 提出了一种仿生折纸夹持器,该夹持器能够利用仿蠼螋翅膀折叠的特性,以最小的传感和驱动系统抓取数倍于其重量的物体. ...
Geometric design, deformation mode, and energy absorption of patterned thin-walled structures
1
2022
... 本文基于钻石折纸图案[24 -25 ] 提出了一种高度对称且具有抓握运动功能的单自由度折纸图案,如图1 所示.抓握折纸图案由5块矩形板、6块梯形板和4块三角形板组成.其中,矩形板可充当机器人手的手掌和指段,梯形板和三角形板起传动作用;与中心矩形板连接的为近端梯形板,与近端矩形板连接的为远端梯形板.在本文中,将中心矩形板视为机器人手的手掌,将近端矩形板和远端矩形板分别视为机器人手的第一指段和第二指段.图1 中:l 1 l 2 l 3 h 1 h 2 α β α , β ∈ 0 , π / 2 . ...
Engineering origami: a comprehensive review of recent applications, design methods, and tools
1
2021
... 本文基于钻石折纸图案[24 -25 ] 提出了一种高度对称且具有抓握运动功能的单自由度折纸图案,如图1 所示.抓握折纸图案由5块矩形板、6块梯形板和4块三角形板组成.其中,矩形板可充当机器人手的手掌和指段,梯形板和三角形板起传动作用;与中心矩形板连接的为近端梯形板,与近端矩形板连接的为远端梯形板.在本文中,将中心矩形板视为机器人手的手掌,将近端矩形板和远端矩形板分别视为机器人手的第一指段和第二指段.图1 中:l 1 l 2 l 3 h 1 h 2 α β α , β ∈ 0 , π / 2 . ...
Design and kinematic analysis of a rigid-origami-based underwater sampler with deploying-encircling motion
1
2022
... 本文所提出的抓握折纸图案为四顶点折痕图案,其运动学模型可通过D-H法[26 -28 ] 来构建.一般情况下,四顶点折痕图案包括4个面板(标记为a,b,c,d)和4条折痕(标记为1,2,3,4);4条折痕在公共点O 处相交,如图2 (a)所示.其中,相邻折痕之间的扇形角分别为α 12 α 23 α 34 α 41 . 从机构学角度来看,将四顶点折痕图案中的面板和折痕视为连杆和转动关节,由此可获得等效的球面4R连杆机构,如图2 (b)所示. ...
Design and analysis of reconfigurable and deployable thin-walled architectural equipment inspired by Mirror-Miura origami patterns
0
2023
Symmetric waterbomb origami
1
2016
... 本文所提出的抓握折纸图案为四顶点折痕图案,其运动学模型可通过D-H法[26 -28 ] 来构建.一般情况下,四顶点折痕图案包括4个面板(标记为a,b,c,d)和4条折痕(标记为1,2,3,4);4条折痕在公共点O 处相交,如图2 (a)所示.其中,相邻折痕之间的扇形角分别为α 12 α 23 α 34 α 41 . 从机构学角度来看,将四顶点折痕图案中的面板和折痕视为连杆和转动关节,由此可获得等效的球面4R连杆机构,如图2 (b)所示. ...
Vertex-splitting on a diamond origami pattern
1
2019
... 研究表明,双球面4R连杆机构装配体的运动为单自由度[29 ] .假设θ 2 I a 3 I a 1 I I 式(6) 和式(7) ,可得基于折纸的抓握机构的运动学方程: ...
Multistable behaviors of compliant sarrus mechanisms
1
2013
... 为保证能够均匀地分配驱动力,考虑到抓握机构的对称性,驱动机构同样保持对称性.为此,采用四支链的Sarrus机构作为机器人手抓握机构的驱动机构.驱动机构与抓握机构共用1块中心矩形板和2块近端梯形板,如图4 所示.根据Sarrus机构的特性[30 ] ,当下平台板固定时,上平台板作直线运动,则近端矩形板与上平台板之间的角度相应改变,从而带动抓握机构作抓握运动. ...
A negative stiffness structure with multi-stable characteristic
1
2023
... 假设上平台板与下平台板的距离h 13 = h 0 C 1 C 3 [31 ] .本文在铰链A 1 A 3 k E m i n = 0 . ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}