


近年来,机器人技术已在服务业、工业等领域得到了广泛应用,并逐渐开始在医疗领域崭露头角。随着机器人技术的不断发展,支气管镜机器人逐渐成为医疗领域的研究热点。Graetzel等人[1]基于肺模型、活体动物及人体实验对Auris Monarch平台进行了开发、优化和临床测试。美国Intuitive Surgical公司设计的用于微创活检和支气管镜检查的系统——Ion™机器人具有极高的操作灵活性[2]。四川大学华西医院于2022年完成了我国首例国产机器人辅助支气管镜的肺结节活检手术[3]。同年,诺亚医学公司研发的支气管镜软体机器人Calaxy于2023年获美国FDA(Food and Drug Administration,食品药品监督管理局)批准上市,成为支气管镜手术机器人领域的后起之秀。目前,朗合医疗联合清华大学和广州呼吸健康研究院自主研发了国内首台肺部柔性内窥镜手术机器人——Unicorn麒麟TM系统。
1 经支气管诊疗机器人机构设计
图1
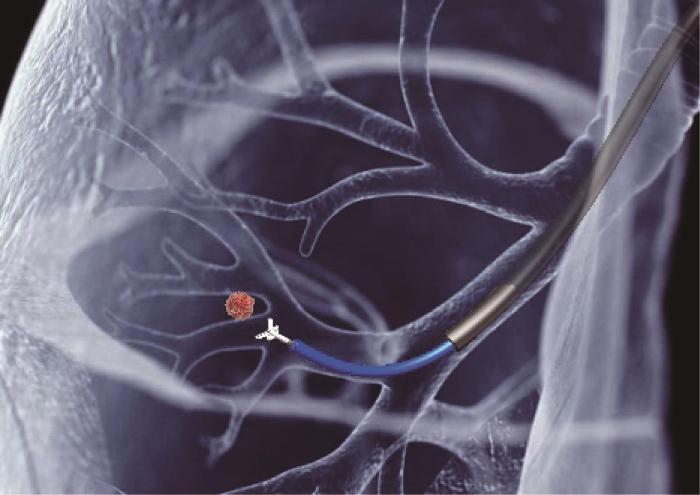
图1
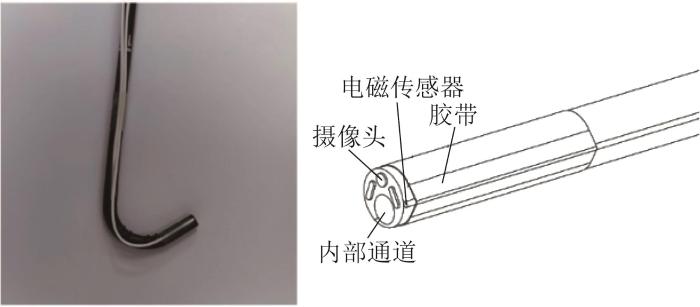
经支气管诊疗机器人的柔性末端执行器
Fig.1
Flexible end-effector of transbronchial diagnosis robot
根据支气管镜辅助肺部检查手术的规范,对支气管镜及活检钳的功能进行详细分析,得到经支气管诊疗机器人的基本执行方式及所需行程,如表1所示。同时,设计对应的机器人机械结构,以实现支气管镜的推进、旋转、控弯以及活检钳的导入、夹取等动作。
表1 经支气管诊疗机器人的功能分析
Table 1
| 末端执行器 | 功能 | 自由度 | 执行方式 | 行程 |
|---|---|---|---|---|
| 支气管镜 | 视觉 导航 | 3 | 轴向移动 | (600±25)mm |
| 径向旋转 | ±180° | |||
| 绳驱控弯 | -130°~160° | |||
| 活检钳 | 夹取病理样本 | 2 | 递送、撤出 | ≤2 300 mm |
| 张开、夹持 | 0~15 mm | |||
螺旋盘绕 (被动) | 6.5×360° |
图2
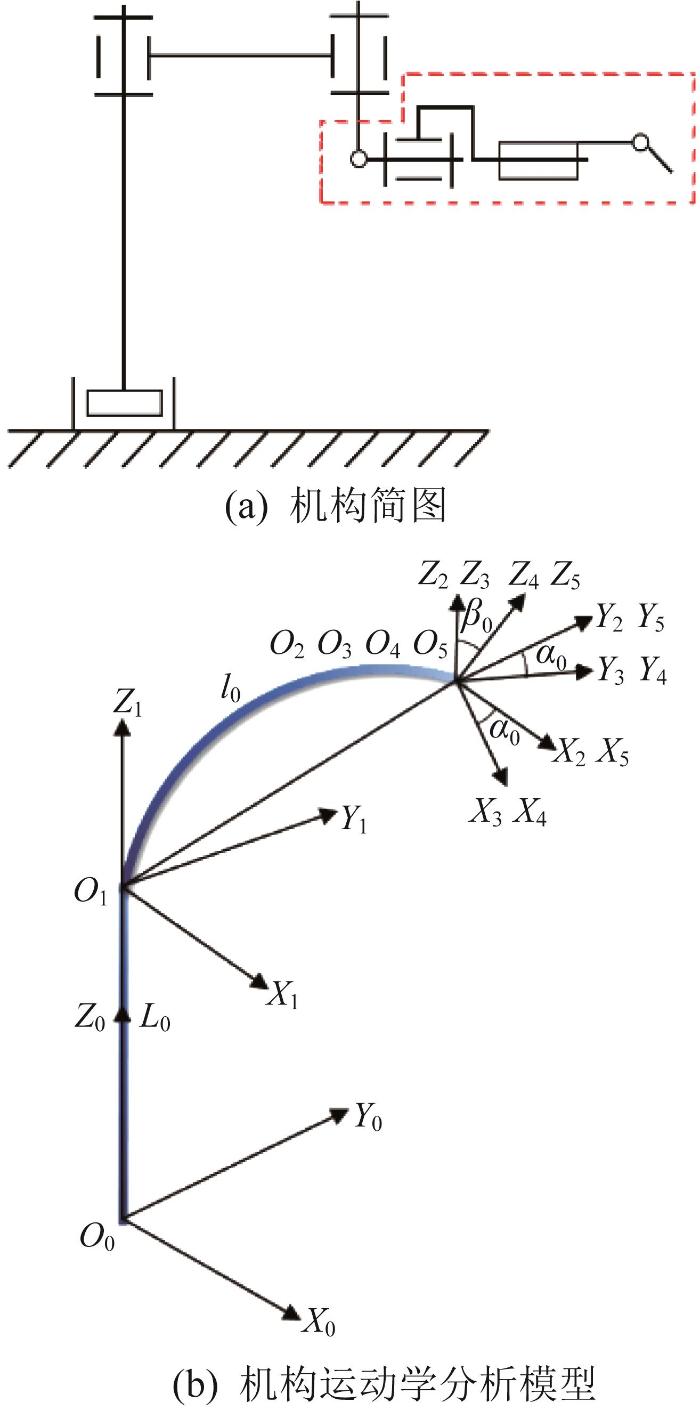
图2
经支气管诊疗机器人机构设计与运动学分析
Fig.2
Mechanism design and kinematics analysis of transbronchial diagnosis robot
根据图2,该机器人机构的运动学变换可分5步实现,变换矩阵如下:
式中: T 为各坐标系之间的齐次变换矩阵,
联立
根据
由此可知,图2(a)所示机构满足经支气管诊疗机器人主体机构的基本运动需求,即可完成推拉、旋转以及柔性末端执行器控弯等基本诊疗动作。
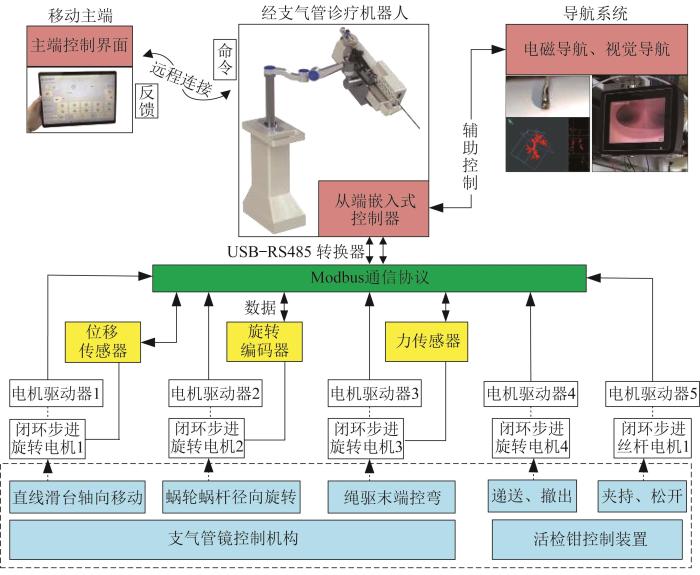
本文设计的经支气管诊疗机器人的整体系统框图如图3所示,包括诊疗机器人(由主体机构、台车、把持被动机械臂和控制硬件组成)、移动主端控制器和导航系统(电磁导航定位系统与视觉导航系统)等。该机器人系统基于主从协同操作,其中:主端控制器为利用Python程序开发的主端控制软件,安装在微软Surface Pro平板电脑中。操作人员通过操纵主端控制器将运动指令发送到从端嵌入式控制器;从端控制器接收到主端发送的运动指令后,通过驱动器控制从端的机器人机构完成相应动作。与此同时,通过视觉导航系统(支气管镜末端摄像头)实时显示支气管腔道图像,并通过电磁导航定位系统同步跟踪电磁传感器的位置和方向。本方案采用NDI公司的Aurora电磁跟踪系统。
图3
在设计经支气管诊疗机器人机构过程中,除了需要对标准件和非标零件进行选型和加工外,还需要根据机器人运行过程中的载荷情况对驱动电机及其配套硬件进行选型。图4所示为经支气管诊疗机器人电控元器件的选型与布局。
图4
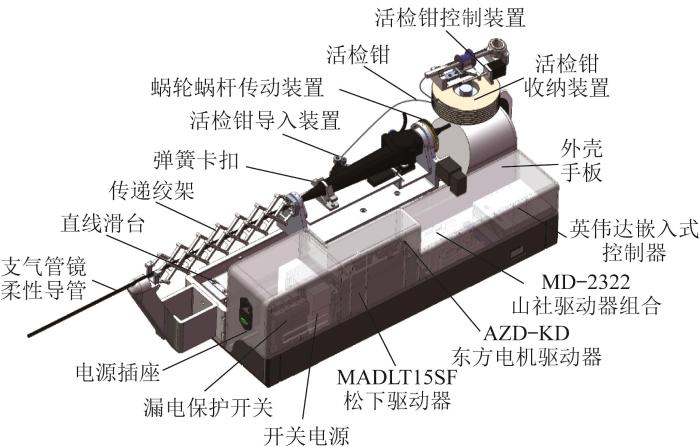
图4
经支气管诊疗机器人电控元器件的选型与布局
Fig.4
Selection and layout of electronic control components for transbronchial diagnosis robot
2 基于Cosserat杆理论的柔性末端执行器位姿分析
2.1 柔性末端执行器的结构
本文设计的经支气管诊疗机器人的柔性末端执行器主要为内部带有活检通道的支气管镜柔性导管。支气管镜柔性导管弯曲段的内部结构如图5所示。基于支气管镜柔性导管的结构和驱动原理,开展柔性末端执行器位姿分析。
图5
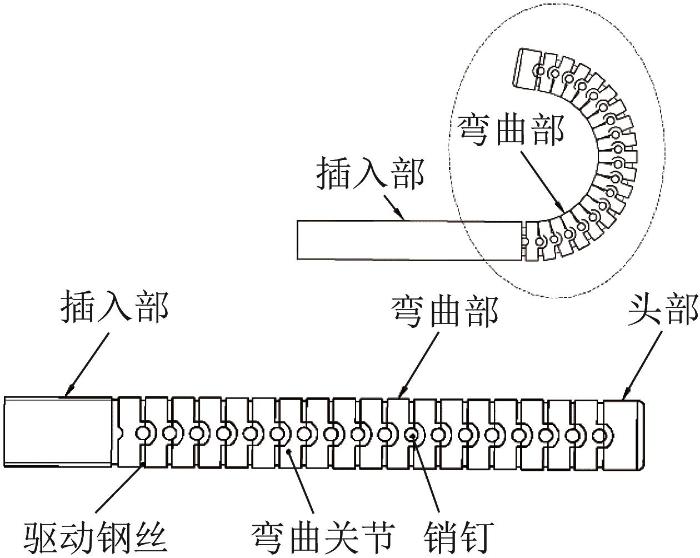
图5
支气管镜柔性导管弯曲段的内部结构
Fig.5
Internal structure of flexible catheter bending section of bronchoscope
2.2 柔性末端执行器位姿分析
基于Cosserat杆理论中的本构方程,对柔性末端执行器的位姿进行分析,即:根据每个横截面需满足动量平衡法则,通过平衡每个横截面的线性动量和角动量来推演Cosserat杆的动力学方程,并通过数值求解得到其在平衡状态下的位姿。在给定外力
式中:ρ为密度,A为横截面积,
根据上述方程及适当的边界条件,对单根Cosserat杆进行动力学建模。为了求解线性动量平衡方程,需定义相应的弯曲刚度矩阵 B 和剪切刚度矩阵 S。对于弹性杆, B 和 S 均为3
式中:E为弹性杨氏模量,G为剪切模量,Ii (i=1, 2, 3)为截面二次惯性矩,ac为常数。
此外,根据线性弹性假设,定义载荷—应变关系以及扭矩—曲率关系满足本构定律。载荷—应变的关系式和扭矩—曲率的关系式分别表示为:
式中: n 为内部载荷, τ 为内部扭矩, σ0、 κ0为 σ 、 κ 的参考值。
根据弹性杆的初始条件与边界条件,推导出Cosserat杆的动力学控制方程。在全局参考系下求得Cosserat杆的线速度及线性动量平衡方程;在局部参考系下求得Cosserat杆中心线上每一点的角速度及角动量平衡方程。
3 柔性末端执行器位姿及工作空间仿真求解
3.1 仿真模型搭建
利用MATLAB软件中的SoRoSim工具箱[11-12]对经支气管诊疗机器人柔性末端执行器的能量转化、力-位映射关系及工作空间进行仿真分析。仿真实验框架如图6所示,主要包括以下3个方面。1)能量平衡仿真,目的是验证柔性末端执行器的弹性阻尼。由于柔性末端执行器为刚柔耦合结构,其属性是通过测试得到的,可能会存在一定偏差,因此在能量平衡仿真时分别在有/无弹性阻尼两种情况下对柔性末端执行器施加驱动力,并观察其能量转化情况。2)力-位映射关系仿真,当支气管镜与活检钳共同应用时,柔性末端执行器的刚度会影响手术安全性,故需通过力-位映射关系仿真来预测柔性末端执行器在组织力作用下的被动形变量。3)工作空间仿真,通过预测柔性末端执行器的工作空间以及工作空间内随机点的分布概率来分析机器人机构功能的可行性。
图6
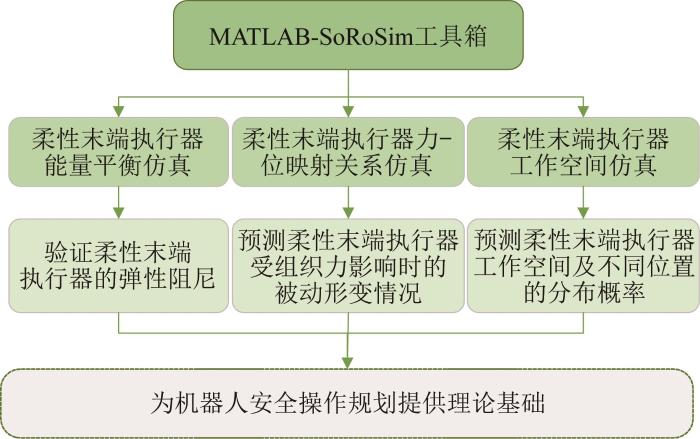
图6
柔性末端执行器仿真实验框架
Fig.6
Simulation experiment framework for flexible end-effector
在SoRoSim工具箱中,基于对柔性末端执行器的受力分析,构建对应的仿真模型,如图7所示。
图7
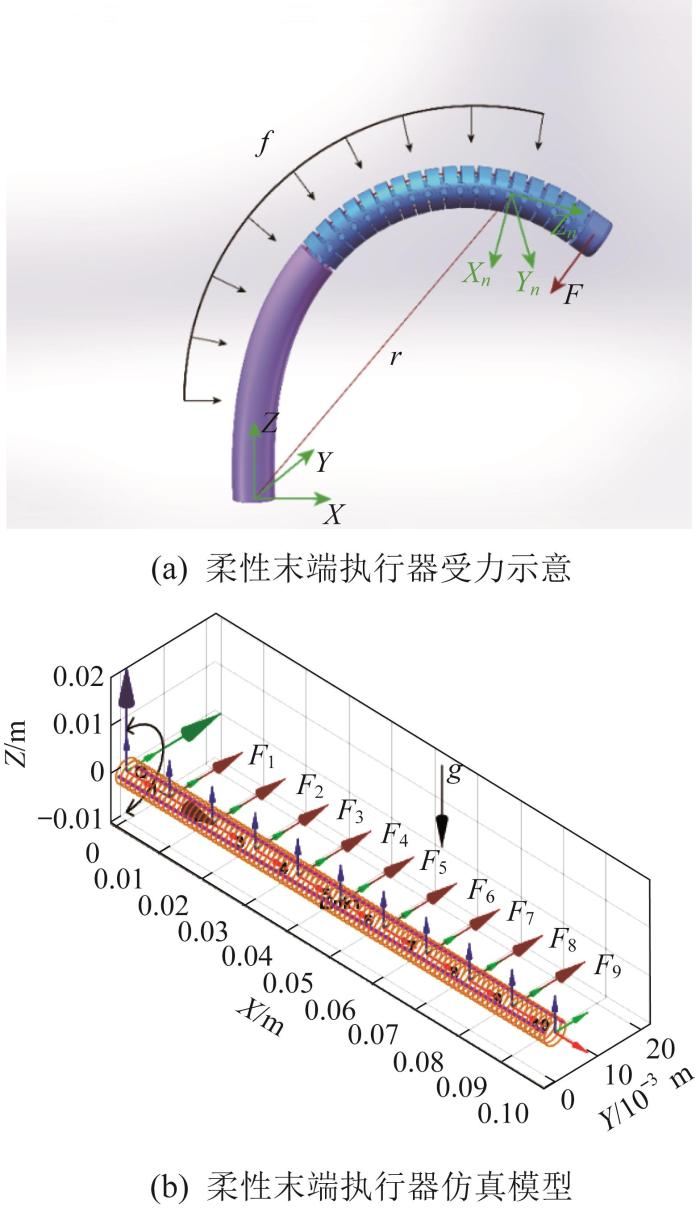
图7
柔性末端执行器的受力分析及其仿真模型
Fig.7
Force analysis and simulation model of flexible end-effector
3.2 仿真结果与分析
1)基于Cosserat杆理论的能量平衡仿真。
为了实现对经支气管诊疗机器人柔性末端执行器位姿变化的准确仿真,基于Cosserat杆理论中的能量平衡方程来验证复杂结构杆的弹性阻尼等参数的有效性。通过更改弹性杆的弹性阻尼,分别在有阻尼与无阻尼情况下通过施加驱动力来使柔性末端执行器偏转,随后逐渐释放驱动力并记录柔性末端执行器在重力作用下的能量转化情况(10 s内)。在能量平衡仿真中,沿X轴方向建立一根长度为50 mm、直径为5.2 mm的圆柱形弹性杆,通过绳驱控弯使其偏转至单侧最大限度130°,释放驱动力后动态回弹。为了实现真实的模拟状态,采用近似三次多项式应变模式(即允许围绕Y轴和Z轴的扭转和旋转),释放驱动力后可得到柔性末端执行器的能量变化情况。图8所示为0—5 s内柔性末端执行器的运动状态(运动状态视频的定格记录)。
图8
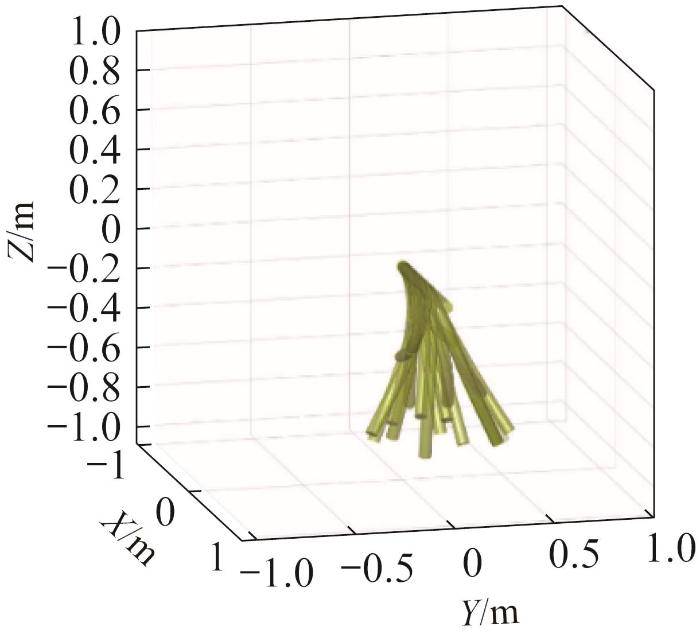
图8
柔性末端执行器运动状态的仿真结果(0—5 s)
Fig.8
Simulation result of movement state of flexible end-effector (0-5 s)
图9
图9
柔性末端执行器能量转化仿真结果
Fig.9
Simulation results of energy conversion of flexible end-effector
从图9中可以看出,在有阻尼情况下,柔性末端执行器的总能量呈衰减趋势;而在无阻尼情况下,柔性末端执行器的总能量保持为与初始应变能相对应的非零正常数。由于Cosserat杆理论中的参数由MATLAB软件计算并进行后处理,能量守恒的任何偏差均归因于数值积分(时间和空间)中的误差。上述仿真结果验证了弹性杆的阻尼参数的有效性,这可为后续的柔性末端执行器的力-位映射关系仿真和工作空间仿真提供理论依据。
2)柔性末端执行器的力-位映射关系仿真。
在SoRoSim工具箱中,模拟柔性末端执行器的弯曲行为。通过构建长度为50 mm、直径为5.2 mm的主动绳驱控弯圆柱体并在末端施加随动力,来模拟支气管镜柔性导管的弯曲部。设置弹性杨氏模量E=19 GPa以及绕Y轴的四阶弯曲应变,以模拟柔性末端执行器在受到随动力时的偏转情况;随动力在0~0.2 N之间线性递增。当柔性末端执行器的形变呈静止或负增长时,认为达到平衡状态,停止施加力并停止仿真。图10所示为柔性末端执行器的力-位映射关系仿真结果。其中:图10(a)所示为竖直面上偏转(偏转0°、向上偏转30°、向上偏转60°、向下偏转30°、向下偏转60°)时的力-位映射关系;图10(b)所示为水平面上偏转(偏转0°、单侧偏转30°、单侧偏转60°)时的力-位映射关系,由于水平偏转时左右偏转对竖直向下的作用力无影响,因此无需设置对称的偏转角度进行重复仿真。由图10(a)可知,在竖直面上偏转0°、向上偏转30°、向上偏转60°时,柔性末端执行器所受的作用力变化明显,且其形变量与作用力呈线性变化;在竖直面上向下偏转30°、向下偏转60°时,柔性末端执行器的形变量变化明显且持续增大,其所受的作用力先快速增大后缓慢增大。由图10(b)可知,不同偏转角度下柔性末端执行器的力-位映射关系曲线的变化趋势较为相似,在刚接触到障碍物时,柔性末端执行器的形变量较不明显,随着所受作用力逐渐增大,其形变量逐渐增大;在偏转0°的情况下,柔性末端执行器的形变量随作用力的变化呈先慢后快的增长趋势。
图10
图10
柔性末端执行器力-位映射关系的仿真结果
Fig.10
Simulation results of force-position mapping relationship of flexible end-effector
综上所述,在不同偏转情况下,柔性末端执行器所受的作用力均未超过0.2 N,由此可预测在安全力值范围内均能够使柔性末端执行器产生1.1 mm以上的弹性形变量,从而保护支气管腔道不被划伤。此外,在柔性末端执行器触碰或撞击支气管腔道内壁前,提前控制支气管镜柔性末端做出预弯,可以大幅度降低其直接接触支气管内壁所造成的风险。基于柔性末端执行器的力-位映射关系预测其安全操作方式,可为经支气管诊疗手术提供理论基础。
3)柔性末端执行器工作空间仿真。
经支气管诊疗机器人的功能是驱动柔性末端执行器经呼吸腔道逐级进入支气管,并为活检钳提供一条单向通道,以实现活检钳在支气管镜末端可视范围内完成活检诊疗动作。因此,分析柔性末端执行器(支气管镜柔性导管与活检钳尖端)的位姿和工作空间尤为重要。支气管镜柔性导管包括弯曲段和被动跟随段,起主要导向作用的为前端弯曲段,因此只要分析弯曲段的位姿,即可推导出整个柔性导管的工作空间。
图11
图11
柔性末端执行器运动轨迹动态仿真结果
Fig.11
Dynamic simulation results of flexible end-effector motion trajectory
在仿真过程中,通过更改轴向移动、径向旋转、绳驱控弯的驱动参数与被动阻力,可得到机器人柔性末端执行器的三维空间位置数据集。采用蒙特卡洛采样方法进行抽样处理并绘制柔性末端执行器工作空间的散点图及其分布概率,结果如图12所示。
图12
图12
柔性末端执行器的工作空间及其分布概率
Fig.12
Workspace and its distribution probability of flexible end-effector
4 实验验证
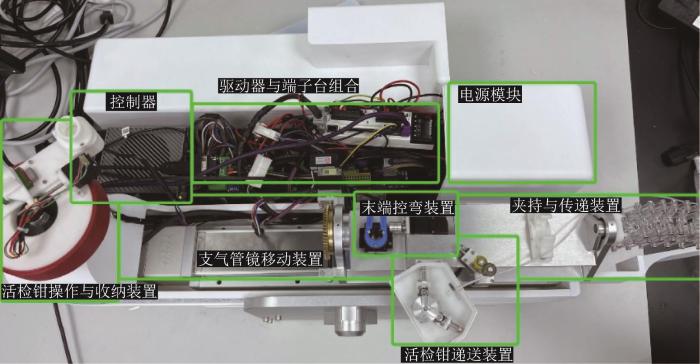
经支气管诊疗机器人实物图如图13所示,其电控元器件主要包括英伟达嵌入式控制器、适配驱动器及端子台组合及电源模块等。机器人控制部分与执行部分左右并排分布,执行部分主要包括活检钳操作与收纳装置、活检钳递送装置、支气管镜移动与旋转装置、末端控弯装置及夹持与传递装置。
图13
4.1 柔性末端执行器力-位映射关系测试实验
为验证机器人柔性末端执行器的导向安全性,开展力-位映射关系实验验证。机器人自身具有轴向移动、径向旋转以及绳驱控弯结构。除了上述主动工作状态外,机器人柔性末端执行器前端的细长柔性导管可借助支气管腔道内壁走向被动地跟随进入,因此可根据组织内壁所施加的轴侧力来辅助柔性导管的位姿变换[13]。
图14
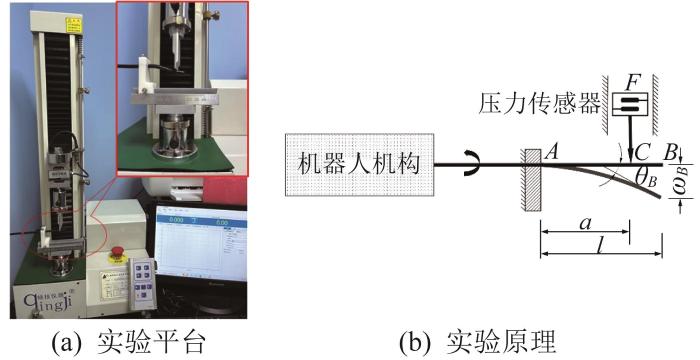
图14
柔性末端执行器力-位映射关系测试实验平台及原理
Fig.14
Experimental platform and principle of force-position mapping relationship test for flexible end-effector
1)压力机施压至目标力值0.2 N,柔性末端执行器位移不改变,即刚度过大,表明是危险的;
2)压力机施压至无限趋近于目标力值0.2 N,柔性末端执行器位移持续改变,表明是安全的;
3)柔性末端执行器位移变化明显,压力机施压值变化微小,且力值远小于0.2 N,表明是安全的。
图15
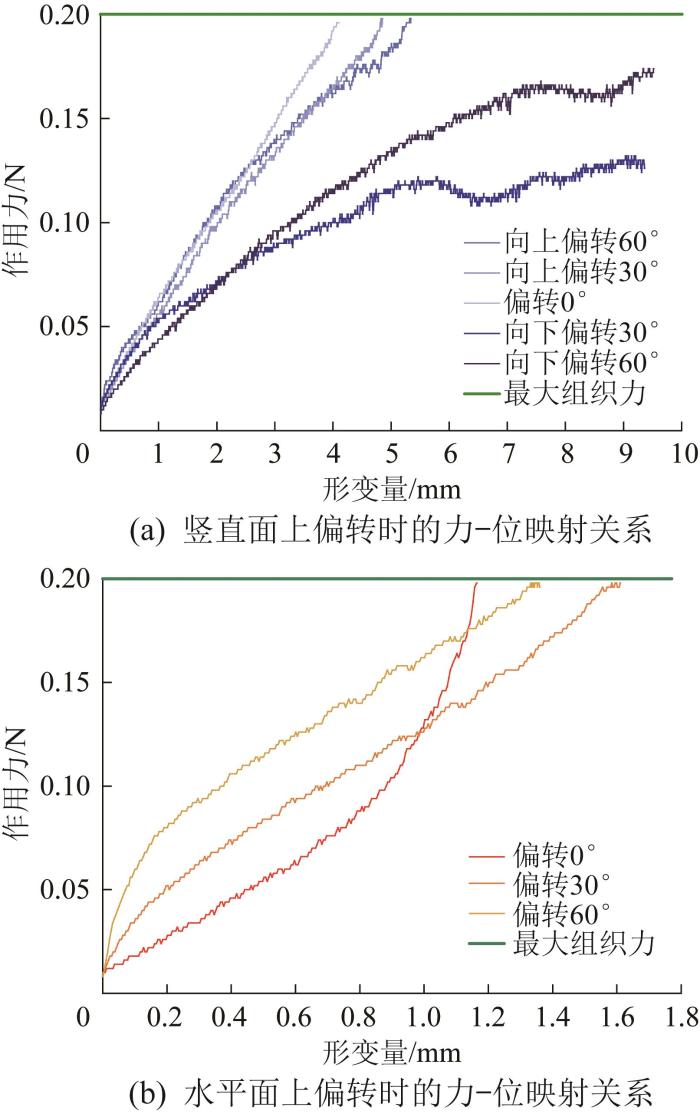
图15
柔性末端执行器力-位映射关系的实验结果
Fig.15
Experimental results of force-position mapping relationship of flexible end-effector
由图15(a)可以看出,当柔性末端执行器在竖直面上偏转0°、向上偏转30°、向上偏转60°时,其所受的作用力变化明显,形变量与力值呈线性关系;在竖直面上向下偏转30°、向下偏转60°时,其形变量变化明显且持续增大,所受的作用力先快速增大后缓慢增大。结果表明,柔性末端执行器在不偏转或与组织壁同向偏转时,其受力、形变量较小,但在小于0.2 N的作用力下可产生超过4 mm的形变量;在与组织壁反向偏转时,柔性末端执行器的随动性较好,几乎无安全风险。由图15(b)可以看出,柔性末端执行器在水平面上单侧偏转30°与单侧偏转60°时的力-位映射关系曲线的变化趋势较为相似,即在刚接触到障碍物时变化较不明显,随着力值逐渐接近组织壁最大力值0.2 N,形变量逐渐增大,最终力值平稳后形变量持续增大;在不偏转的情况下,柔性末端执行器的形变量随所受的作用力呈先慢后快的增长趋势,这与其内部结构有一定关系。结果表明,柔性末端执行器在与组织壁平行的平面上发生偏转时,对预弯角度下的形变量影响较小,形变量误差小于0.8 mm;当受到组织壁作用力后会产生形变,在小于0.2 N的作用力下可产生超过1.1 mm的形变量。
综上,在不同偏转情况下,柔性末端执行器所受的作用力均未超过0.2 N,且在安全力值范围内均能够产生1.1 mm以上的形变量,以实现被动跟随,从而保护支气管腔道不被划伤。因此,在触碰或撞击支气管腔道内壁前,提前控制支气管镜柔性导管做出预弯,可大幅度降低直接接触内壁所造成的风险。正确操控支气管镜的偏转角度,可使其尽可能远离支气管腔道组织壁,并保证其对组织壁的作用力在绝对安全范围内。
4.2 柔性末端执行器工作空间标定实验
图16
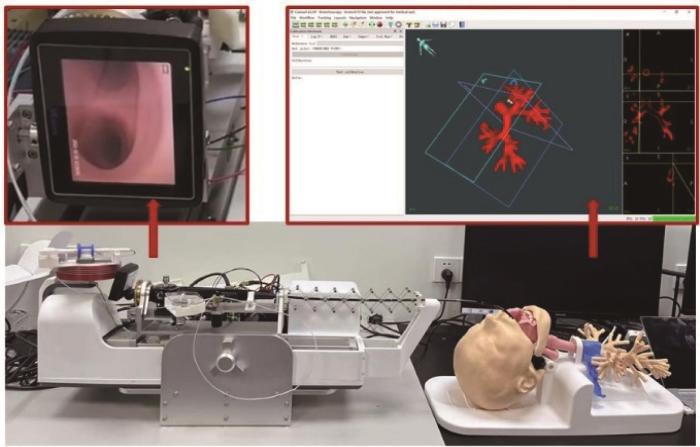
图16
柔性末端执行器位姿及工作空间标定实验平台
Fig.16
Pose and workspace calibration experiment platform for flexible end-effector
图17
在柔性末端执行器工作空间标定实验中,通过机器人主端操控支气管镜完成轴向移动、径向旋转以及绳驱控弯等动作,以实现支气管镜经人体模型呼吸腔道逐一抵达3~4级支气管腔道;同时通过主端操控活检钳,以使活检钳在支气管镜通道内递送并完成开合、夹取等动作。在实验过程中,利用电磁传感器和深度相机实时采集柔性末端执行器的位姿数据。通过图像处理方法对电磁传感器采集的位姿数据进行处理,并将柔性末端执行器的位姿逐一复现到透明的人体模型中,以便在人体模型中观察位姿和工作空间。柔性末端执行器位姿及工作空间的标定结果与仿真结果的对比如图18所示(图18中从上到下依次为人体模型中的复现结果、深度相机拍摄结果以及仿真结果)。实验结果表明:该机器人的柔性末端执行器可实现4级支气管腔道内的全肺抵达,能够完成经自然腔道的远程活检诊疗手术。
图18
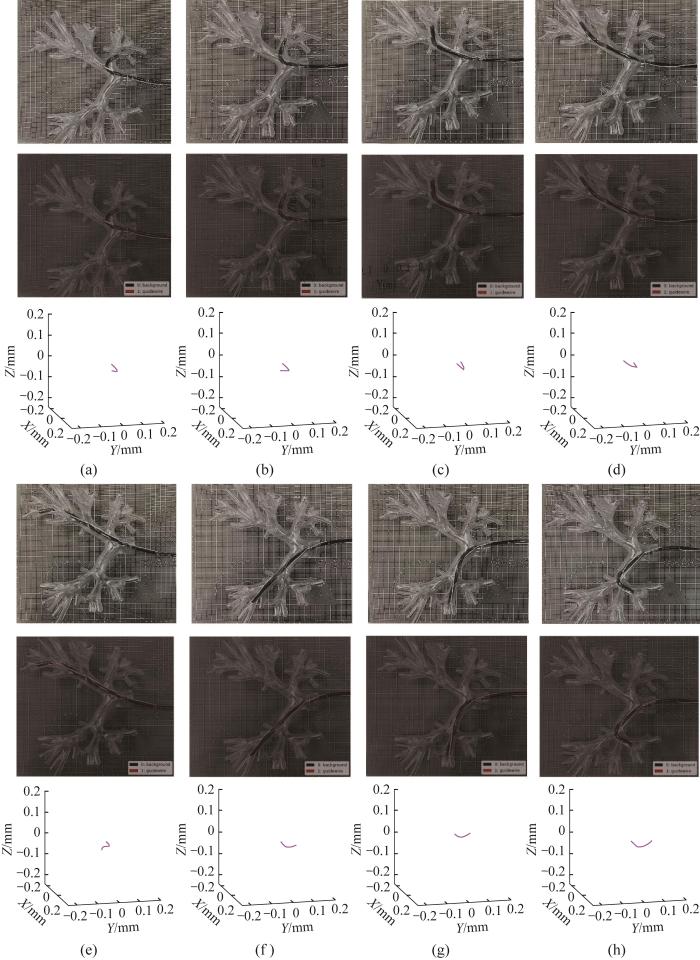
图18
柔性末端执行器位姿及工作空间的标定结果与仿真结果的对比
Fig.18
Comparison between calibration results and simulation results of pose and workspace of flexible end-effector
4.3 机器人性能验证实验
图19
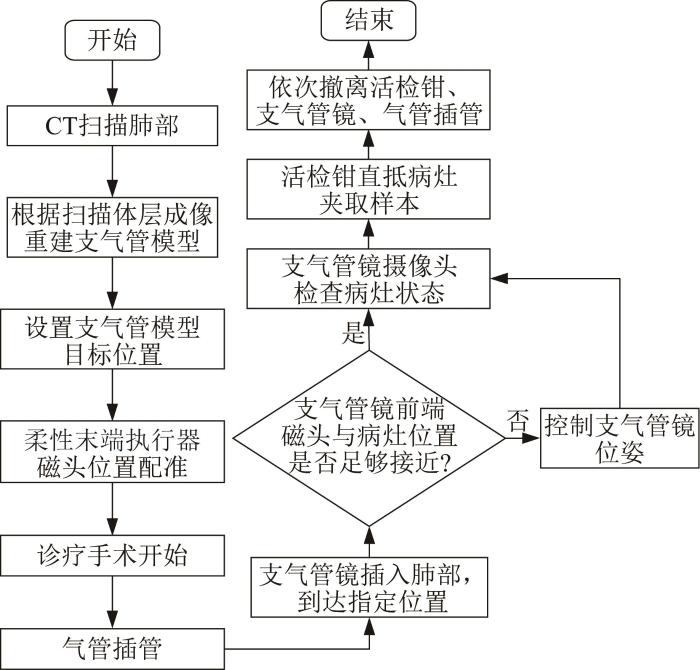
图19
经支气管诊疗机器人性能验证实验流程
Fig.19
Experimental flow for performance verification of transbronchial diagnosis robot
如图20所示,所搭建的动物实验平台主要由经支气管诊疗机器人执行机构、主端控制器以及支气管镜视频与电磁导航画面显示仪组成。借助台车及把持被动机械臂将机器人的柔性末端执行器靠近介入点,并调整至合理的介入角度,支气管镜柔性导管前端手动进入气管插管引导通道。实验对象为深度麻醉的巴马猪,全程利用监护仪监测其生命体征,并全程拍摄视频以记录实验过程。
图20
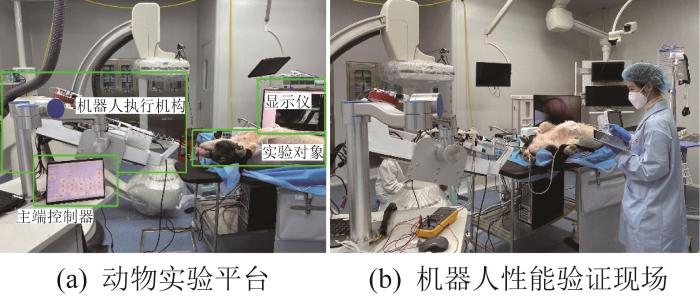
图20
经支气管诊疗机器人性能验证实验平台
Fig.20
Experimental platform for performance verification of transbronchial diagnosis robot
首先,通过实验测试机器人柔性末端执行器的径向旋转性能及传递效果。该机器人采用的径向旋转机构为蜗轮蜗杆结构,可实现360°整周旋转。采用旋转编码器实时读取旋转步进电机轴输出的运动数据,并与机器人主端控制器发出的运动命令进行对比。在实验过程中,操控机器人柔性末端执行器作0°~180°往复回转运动,每次回转均有固定时长的停歇;测试速度远大于真实手术中的运行速度。
随后,通过实验测试机器人柔性末端执行器的轴向移动性能及传递效果。通过主端控制器,控制直线滑台作往复推进运动,并逐渐推至最远距离。直线滑台的最大行程为250 mm,由于支气管镜最前端需要留有一段引导支气管镜进入气管插管的距离,因此在轴向移动性能测试时并非在0~250 mm的极限位置处开始与结束,而是从随机位置处开始与结束。在实验过程中,测试柔性末端执行器轴向推进时的主从传递性以及停顿点的精度。利用位移传感器来读取直线滑台上柔性末端执行器的实时位置,并与主端控制器发出的命令、从端机器人执行器接收的命令进行比较。
图21
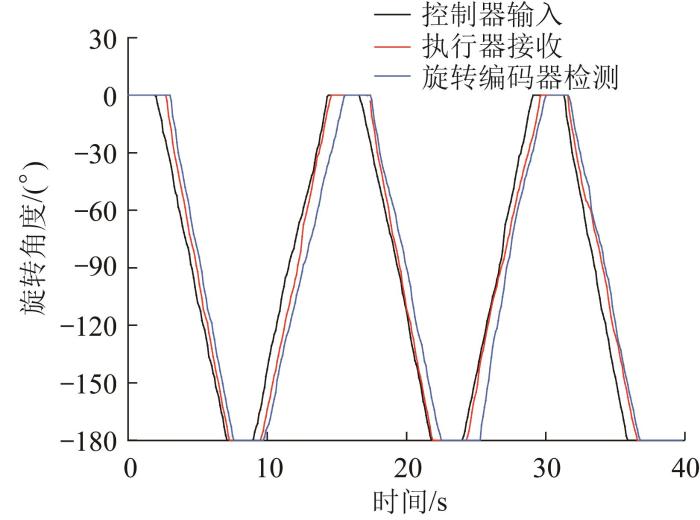
图21
柔性末端执行器的径向旋转角度—时间曲线
Fig.21
Radial rotation angle-time curve of flexible end-effector
图22
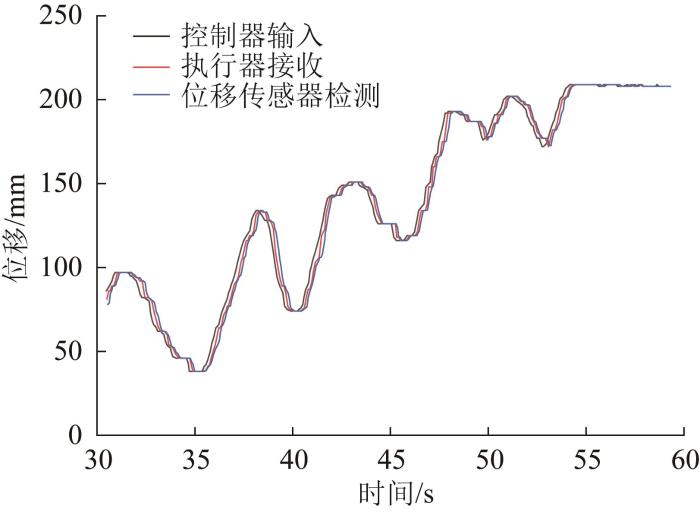
图22
柔性末端执行器的轴向位移—时间曲线
Fig.22
Axial displacement-time curve of flexible end-effector
表2 经支气管诊疗机器人性能测试结果
Table 2
| 参数 | 测试结果 | |
|---|---|---|
| 径向旋转 | 轴向移动 | |
| 运动形式 | 往复回转 | 往复推进 |
| 测试时间 | 40 s | 30 s |
| 行程 | 180° | 210 mm |
| 误差 | -0.472°~0.365° | -0.06~0.06 mm |
5 结 论
本文设计了一种新型的经支气管诊疗机器人,并研究了双器械协同控制下其柔性末端执行器的位姿。基于Cosserat杆理论建立了柔性末端执行器的力学模型,并利用MATLAB软件中的SoRoSim工具箱对柔性末端执行器的力-位映射关系、位姿和工作空间进行了仿真求解,最后通过实验对柔性末端执行器的位姿以及机器人的运行效果进行了测试。所得结论如下。
1)机器人的柔性末端执行器可视作柔性连续体结构,由基于Cosserat杆理论的位姿分析可知,柔性末端执行器在不同程度支气管腔道内壁组织力的作用下会产生微小被动形变。基于力-位映射关系预测柔性末端执行器的安全操作方式,可为经支气管诊疗手术提供理论基础。
2)机器人的主从式远程操作方式存在一定的控制延时现象。当径向旋转角度或轴向位移较大时,机器人存在微小的跟随误差。结合实际使用场景,机器人通常处于较小导程且缓慢运行的状态,故较小的延迟误差不会影响其位置精度,可通过远程实时控制来实现机器人柔性末端执行器位姿的调整。研究结果可为经自然腔道活检术的多器械协同控制提供理论基础。
参考文献
Robotic bronchoscopy drive mode of the Auris Monarch platform
[C]//
A historical review of medical robotic platforms
[J].
华西医院完成全国首例国产机器人辅助经支气管镜肺结节活检术
[J].DOI:10.3969/j.issn.1005-8257.2022.08.005 [本文引用: 1]
West China Hospital completed the first domestic robot-assisted transbronchoscopic lung nodule biopsy in China
[J].DOI:10.3969/j.issn.1005-8257.2022.08.005 [本文引用: 1]
支气管镜新技术在肺小结节诊断中的应用
[J].
Application of new technology of bronchoscopy in the diagnosis of small pulmonary nodules
[J].
机器人支气管镜技术在肺结节诊断中的应用
[J].DOI:10.3760/cma.j.cn112147-20210827-00596 [本文引用: 1]
Application of robotic-assisted bronchoscopy in the diagnosis of peripheral lung lesions
[J].DOI:10.3760/cma.j.cn112147-20210827-00596 [本文引用: 1]
基于 3-RSR 并联机构的蛇形机器人本体构型设计与运动性能研究
[J].DOI:10.3901/JME.2021.23.021 [本文引用: 1]
Body configuration design and kinematic performance research of snake-like robot based on 3-RSR parallel mechanism
[J].DOI:10.3901/JME.2021.23.021 [本文引用: 1]
并联机器人逆动力学建模的几何代数方法
[J].DOI:10.3901/jme.2022.07.001 [本文引用: 1]
Geometric algebra-based method for inverse dynamic modeling of parallel robots
[J].DOI:10.3901/jme.2022.07.001 [本文引用: 1]
Cosserat rod-based dynamic modeling of tendon-driven continuum robots: a tutorial
[J].
Real-time dynamics of soft and continuum robots based on Cosserat rod models
[J].
Robust control of continuum robots using Cosserat rod theory
[J].
SoRoSim: a MATLAB toolbox for soft robotics based on the geometric variable-strain approach
[J].
Model based control of soft robots: a survey of the state of the art and open challenges
[EB/OL]. (
主从遥操作机器人位姿态误差分析及力位补偿研究
[D].
Position and attitude error analysis and force position compensation research of master-slave teleoperation robot
[D].
形状记忆合金悬臂梁变形特性分析
[J].
Shape memory alloy cantilever beam deformation characteristics
[J].
Magnetic continuum device with variable stiffness for minimally invasive surgery
[J].
Preliminary analysis of a lightweight and deployable soft robot for space applications
[J].
非线性本构关系下圆板的大挠度问题
[J].
Large deflection of circular plate under nonlinear constitutive relations
[J].
Data-driven disturbance observers for estimating external forces on soft robots
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}