经支气管诊疗机器人设计及其柔性末端执行器位姿研究
张艳平1( ),姜洁1,2(),付治国1,姜晓宇1,王泊鸥1
),姜洁1,2(),付治国1,姜晓宇1,王泊鸥1
),姜洁1,2(),付治国1,姜晓宇1,王泊鸥1
Design of transbronchial diagnosis robot andresearch on pose of flexible end-effector
Yanping ZHANG1(),Jie JIANG1,2(),Zhiguo FU1,Xiaoyu JIANG1,Boou WANG1
),Jie JIANG1,2(),Zhiguo FU1,Xiaoyu JIANG1,Boou WANG1
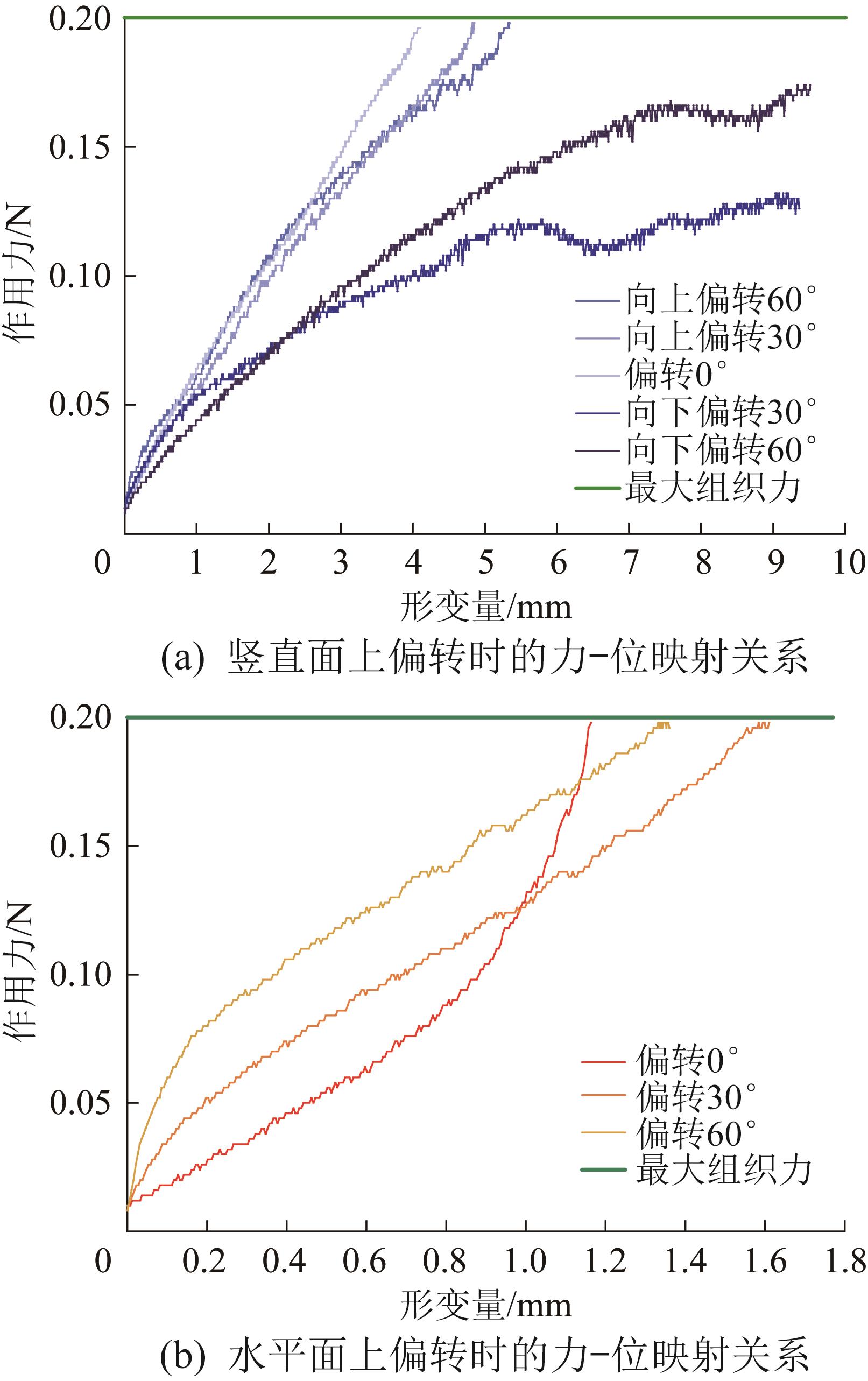
图15. 柔性末端执行器力-位映射关系的实验结果
Fig.15. Experimental results of force-position mapping relationship of flexible end-effector