在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] 。其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] 。自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定。因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求。这2个问题将直接影响振动系统的响应。
自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动。进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中。近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究。与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究。Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应。Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究。黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究。张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究。
然而,上述文献的研究对象主要是激振电机安装在同一质体上的振动系统,而较少涉及激振电机安装在不同质体上的振动系统。为了减小地基载荷、占地面积以及实现对物料的多级筛分,侯勇俊等[23 ] 提出了一种激振电机(异步电机)安装在不同质体上的双质体振动系统,并对其同步性展开了研究。结果表明:一些结构参数对振动系统的同步相位差有显著影响,在部分参数条件下振动系统甚至不能实现自同步运转,这均会影响振动系统的稳态响应和工作效率。
通常当同步相位差为0或π时,双质体振动系统的激振力可以最大程度地叠加或者抵消,故0或π相位同步通常为工程应用所需的工作状态。为了进一步提升振动系统的工作性能,笔者拟采用主从控制结构和滑模控制算法对异步电机进行矢量控制,以实现0或π相位同步。当振动系统的固有频率与激振频率相近时,其振幅会快速变化。利用这一特性,在工程应用中只需更换不同刚度的弹簧而不改变其他条件即可改变质体的振幅。因此,本文主要讨论弹簧刚度对振动系统同步运动的影响以及所设计控制器对弹簧刚度不同的振动系统的同步控制效果。
1 双质体振动系统的动力学模型
双质体振动系统主要由上质体、下质体、激振电机(异步电机)、弹簧和底座等组成,其动力学模型如图1 所示。其中:弹簧是对称放置的;2个异步电机上所带的偏心块用2个偏心转子表示。当振动系统工作时,2个安装在不同质体上的异步电机产生的激振力通过中间弹簧相互传递。这样既可以减小每个质体的载荷,又能使2个质体以不同的轨迹运动。在动力学建模时,先推导振动系统的动能、势能和能量耗散函数,再代入拉格朗日方程以推导振动系统的运动微分方程。
图1
图1
双质体振动系统的动力学模型
Fig.1
Dynamics model of double-mass vibration system
图1 中:o 1 -X 1 Y 1 和o 2 -X 2 Y 2 分别为上振动体(上质体和异步电机1的装配体)和下振动体(下质体和异步电机2的装配体)的绝对坐标系;o 1 ' - X 1 ' Y 1 ' o 2 ' - X 2 ' Y 2 ' o 1 -X 1 Y 1 和o 2 -X 2 Y 2 的相对坐标系;o 1 ' - X 1 ″ Y 1 ″ o 2 ' - X 2 ″ Y 2 ″ o 1 ' - X 1 ' Y 1 ' o 2 ' - X 2 ' Y 2 ' o 1 ' o 2 ' o i ' o i ( i = 1 , 2 ) 重合;o i ″ i =1, 2)为偏心转子i 的旋转中心;li 为原点o i o i ″ φi 为偏心转子i 的角位移;βi 为连线o i o i ″ Xi 轴之间的夹角;ri 为偏心转子i 的等效半径。令Φ 1 ″ Φ 2 ″ o 1 ' - X 1 ″ Y 1 ″ o 2 ' - X 2 ″ Y 2 ″ Φ 1 Φ 2 o 1 -X 1 Y 1 和o 2 -X 2 Y 2 中的坐标,则根据图1 ,可得:
Φ 1 ″ = l 1 c o s β 1 + r 1 c o s φ 1 l 1 s i n β 1 + r 1 s i n φ 1 Φ 2 ″ = l 2 c o s β 2 + r 2 c o s φ 2 l 2 s i n β 2 + r 2 s i n φ 2
Φ 1 = Φ 1 ' + Γ 1 Φ 1 ″ , Φ 2 = Φ 2 ' + Γ 2 Φ 2 ″
Φ 1 ' = x 1 y 1
Φ 2 ' = x 2 y 2
Γ i = c o s ψ i - s i n ψ i s i n ψ i c o s ψ i
式中:Φ 1 ' Φ 2 ' xi 、yi 分别为振动体质心沿Xi 、Yi 方向的位移;ψi 为振动体质心旋转的角位移。
T = 1 2 ∑ i = 1 2 M i x ˙ i 2 + y ˙ i 2 + 1 2 ∑ i = 1 2 J z i ψ ˙ i 2 + 1 2 ∑ i = 1 2 J o i + m o i r i 2 φ ˙ i 2 + 1 2 ∑ i = 1 2 m o i Φ ˙ i T Φ ˙ i
式中:M 1 、M 2 分别为上、下振动体的质量;m o i i 的质量;J z1 、J z2 分别为上、下振动体的转动惯量;J o i i 的转轴的转动惯量。
E = 1 2 k x 2 x 2 2 + 1 2 k y 2 y 2 2 + 1 2 k ψ 2 ψ 2 2 + 1 2 k x 1 x 2 - x 1 2 + 1 2 k y 1 y 2 - y 1 2 + 1 2 k ψ 1 ψ 2 - ψ 1 2
式中:kxi 、kyi 、kψi 分别为沿Xi 、Yi 和质心旋转方向的弹簧刚度,其中k x i = k y i / 3
D = 1 2 f x 2 x ˙ 2 2 + 1 2 f y 2 y ˙ 2 2 + 1 2 f ψ 2 ψ ˙ 2 2 + 1 2 f 1 φ ˙ 1 2 + 1 2 f 2 φ ˙ 2 2 + 1 2 f x 1 x ˙ 2 - x ˙ 1 2 + 1 2 f y 1 y ˙ 2 - y ˙ 1 2 + 1 2 f ψ 1 ψ ˙ 2 - ψ ˙ 1 2
式中:fxi 、fyi 、fψi 分别为沿Xi 、Yi 和质心旋转方向的弹簧阻尼,其中f x i = 0.001 k x i f y i = 0.001 k y i fi 为异步电机i 的转轴的阻尼。
Q = 0 0 0 0 0 0 T e 1 T e 2 T
式中:T e1 、T e2 分别为异步电机1,2的电磁转矩。
d d t ∂ T ∂ q ˙ - ∂ T ∂ q + ∂ E ∂ q + ∂ D ∂ q ˙ = Q
q = x 1 x 2 y 1 y 2 ψ 1 ψ 2 φ 1 φ 2 T
将式(3)至式(6)代入式(7),即可得振动系统的运动微分方程:
M 1 x ¨ 1 - f x 1 x ˙ 2 - x ˙ 1 - k x 1 x 2 - x 1 = m o 1 r 1 φ ¨ 1 s i n φ 1 + φ ˙ 1 2 c o s φ 1 M 2 x ¨ 2 + f x 2 x ˙ 2 + f x 1 x ˙ 2 - x ˙ 1 + k x 2 x 2 + k x 1 x 2 - x 1 = m o 2 r 2 φ ¨ 2 s i n φ 2 + φ ˙ 2 2 c o s φ 2 M 1 y ¨ 1 - f y 1 y ˙ 2 - y ˙ 1 - k y 1 y 2 - y 1 = m o 1 r 1 - φ ¨ 1 c o s φ 1 + φ ˙ 1 2 s i n φ 1 M 2 y ¨ 2 + f y 2 y ˙ 2 + f y 1 y ˙ 2 - y ˙ 1 + k y 2 y 2 + k y 1 y 2 - y 1 = m o 2 r 2 - φ ¨ 2 c o s φ 2 + φ ˙ 2 2 s i n φ 2 J z 1 ψ ¨ 1 - f ψ 1 ψ ˙ 2 - ψ ˙ 1 - k ψ 1 ψ 2 - ψ 1 = m o 1 r 1 l 1 - φ ¨ 1 c o s φ 1 - β 1 + φ ˙ 1 2 s i n φ 1 - β 1 J z 2 ψ ¨ 2 + f ψ 2 ψ ˙ 2 + f ψ 1 ψ ˙ 2 - ψ ˙ 1 + k ψ 2 ψ 2 + k ψ 1 ψ 2 - ψ 1 = m o 2 r 2 l 2 - φ ¨ 2 c o s φ 2 - β 2 + φ ˙ 2 2 s i n φ 2 - β 2 J o 1 + m o 1 r 1 2 φ ¨ 1 + f 1 φ ˙ 1 = T e 1 + T L 1 J o 2 + m o 2 r 2 2 φ ¨ 2 + f 2 φ ˙ 2 = T e 2 + T L 2
T L 1 = m o 1 r 1 x ¨ 1 s i n φ 1 - y ¨ 1 c o s φ 1 - m o 1 l 1 r 1 ψ ¨ 1 c o s φ 1 - β 1 + ψ ˙ 1 2 s i n φ 1 - β 1 T L 2 = m o 2 r 2 x ¨ 2 s i n φ 2 - y ¨ 2 c o s φ 2 - m o 2 l 2 r 2 ψ ¨ 2 c o s φ 2 - β 2 + ψ ˙ 2 2 s i n φ 2 - β 2
式中:T L 1 T L 2
2 双质体振动系统的固有频率
对式(8)的前2个方程进行Laplace变换,可得:
M 1 S 2 x ¯ 1 S - f x 1 S x ¯ 2 S + f x 1 S x ¯ 1 S - k x 1 x ¯ 2 S + k x 1 x ¯ 1 S = f ¯ 1 S M 2 S 2 x ¯ 2 S + f x 2 S x ¯ 2 S + f x 1 S x ¯ 2 S - f x 1 S x ¯ 1 S + k x 2 x ¯ 2 S + k x 1 x ¯ 2 S - k x 1 x ¯ 1 S = f ¯ 2 S
式中:S 为Laplace算子;x ¯ i S x i f ¯ i S m o i r i φ ¨ i s i n φ i + φ ˙ i 2 c o s φ i
X ( S ) x ¯ 1 S x ¯ 2 S = f ¯ 1 S f ¯ 2 S
X ( S ) = M 1 S 2 + f x 1 S + k x 1 - f x 1 S - k x 1 - f x 1 S - k x 1 M 2 S 2 + f x 2 S + f x 1 S + k x 2 + k x 1 = M 1 M 2 S 4 + M 2 f x 1 + M 1 f x 1 + f x 2 S 3 + M 2 k x 1 + M 1 k x 1 + k x 2 + f x 1 f x 2 S 2 + f x 1 k x 2 + f x 2 k x 1 S + k x 1 k x 2
S 11 = - a 1 + j ω x r 1 , S 12 = - a 1 - j ω x r 1 S 21 = - a 2 + j ω x r 2 , S 22 = - a 2 - j ω x r 2
式中:a 1 、a 2 为衰减系数;ωx r1 、ω xr2 为振动系统X 方向的固有频率。
同理,可得振动系统Y 方向的固有频率ωy r1 和ωy r2 。由于在实际工程应用中通常要求振动体上每个点的轨迹相同,因此异步电机的旋转中心与振动体的质心重合(即l 1 = l 2 = 0 m
本文双质体振动系统选用2个相同的异步电机,振动系统和异步电机的参数分别如表1 和表2 所示。根据表2 中异步电机的参数,可得其角频率(即激振频率)为157 rad/s。将表1 中振动系统的参数代入式(12),可计算得到当ky 1 =1 062 kN/m时,振动系统X 方向的固有频率与激振频率相同;当ky 1 =443 kN/m时,振动系统Y 方向的固有频率与激振频率相同。
3 双质体振动系统的控制器设计
交流异步电机的数学模型为非线性高阶系统,其在d -q 坐标系下的电压、磁链方程[24 ] 如下:
U s d U s q U r d U r q = R s + p L s - ω T L s p L m - ω T L m ω T L s R s + p L s ω T L m p L m p L m - ω s L m R r + p L r - ω s L r ω s L m p L m ω s L r R r + p L r I s d I s q I r d I r q
ϕ s d ϕ s q ϕ r d ϕ r q = L s 0 L m 0 0 L s 0 L m L m 0 L r 0 0 L m 0 L r I s d I s q I r d I r q
式中:R s R r L m L s L r ω T ω s U 、I 、ϕ t 。
T e = 3 2 n p L m I s q ϕ r / L r
根据式(15),将式(8)的后2个公式改写成如下形式:
J o 1 + m o 1 r 1 2 φ ¨ 1 + f 1 φ ˙ 1 = K T 1 u 1 + T L 1 J o 2 + m o 2 r 2 2 φ ¨ 2 + f 2 φ ˙ 2 = K T 2 u 2 + T L 2
K T 1 = K T 2 = 3 2 n p L m ϕ r / L r
本文通过对2个异步电机进行矢量控制来实现其同步运转。异步电机的矢量控制原理如图2 所示。参照文献[16 -18 ],采用主从控制结构和滑模控制算法分别设计2个异步电机的控制器:对于电机1,只控制其转速;对于电机2,只控制其与电机1之间的相位差。由此可实现2个异步电机的0或π相位差同步运转。
图2
图2
异步电机的矢量控制原理
Fig.2
Vector control principle for asynchronous motor
3.1 主电机转速控制
设异步电机1(主电机)的目标转速为ω d ω 1 ω 2 e 1 为:
e 1 = ω 1 - ω d (17)
对式(17)求导,并将式(16)中的第1个方程代入,则可得:
e ˙ 1 = 1 J o 1 + m o 1 r 1 2 K T 1 u 1 - f 1 ω 1 + T L 1 - ω ˙ d (18)
s 1 = e 1 + c 1 ∫ 0 t e 1 τ d τ (19)
对s 1 [16 -18 ] :
s ˙ 1 = 1 J o 1 + m o 1 r 1 2 K T 1 u 1 - f 1 ω 1 + T L 1 - ω ˙ d + c 1 e 1 (20)
假设s ˙ 1 = 0 T L 1 u e1 可表示为:
u e 1 = 1 K T 1 J o 1 + m o 1 r 1 2 ω ˙ d - c 1 e 1 + 1 K T 1 f 1 ω 1 (21)
u h 1 = - 1 K T 1 J o 1 + m o 1 r 1 2 ε 1 s g n s 1 (22)
s g n s 1 = 1 , s 1 > 0 0 , s 1 = 0 - 1 , s 1 < 0
根据式(21)和式(22),异步电机1的转速滑模控制器u 1 为:
u 1 = 1 K T 1 J o 1 + m o 1 r 1 2 ω ˙ d - c 1 e 1 + 1 K T 1 f 1 ω 1 - 1 K T 1 J o 1 + m o 1 r 1 2 ε 1 s g n s 1 (23)
s ˙ 1 = - ε 1 s g n s 1 + T L 1 J o 1 + m o 1 r 1 2 (24)
V 1 = s 1 2 2 (25)
由式(25)可知,当V 1 = 0 s 1 = 0 V 1 > 0 s 1 ≠ 0 式(25)求导,可得:
V ˙ 1 = s 1 s ˙ 1 = s 1 - ε 1 s g n s 1 + T L 1 J o 1 + m o 1 r 1 2 = - ε 1 s 1 + s 1 T L 1 J o 1 + m o 1 r 1 2 ≤ - ε 1 - T L 1 J o 1 + m o 1 r 1 2 s 1 (26)
由式(26)可知,当ε 1 > T L 1 / J o 1 + m o 1 r 1 2 V ˙ 1 ≤ 0 l i m t → ∞ s 1 t = 0
e ˙ 1 + c 1 e 1 = 0 (27)
3.2 从电机相位控制
异步电机1和异步电机2之间相位差的追踪误差e 2 可表示为:
e 2 = Δ φ - Δ φ d (28)
式中:Δ φ Δ φ = φ 1 - φ 2 Δ φ d
e ¨ 2 + f 1 J o 1 + m o 1 r 1 2 φ ˙ 1 - f 2 J o 2 + m o 2 r 2 2 φ ˙ 2 = K T 1 J o 1 + m o 1 r 1 2 u 1 + T L 1 J o 1 + m o 1 r 1 2 - K T 2 J o 2 + m o 2 r 2 2 u 2 - T L 2 J o 2 + m o 2 r 2 2 (29)
s 2 = c 2 e 2 + e ˙ 2 (30)
令s ˙ 2 = 0 式(28)和式(29),则异步电机2的等效控制器u e2 可表示为:
u e 2 = K T 1 J o 1 + m o 1 r 1 2 u 1 + T L 1 J o 1 + m o 1 r 1 2 - T L 2 J o 2 + m o 2 r 2 2 - f 1 J o 1 + m o 1 r 1 2 φ ˙ 1 + f 2 J o 2 + m o 2 r 2 2 φ ˙ 2 + c 2 φ ˙ 1 - φ ˙ 2 J o 2 + m o 2 r 2 2 K T 2 (31)
同理,为了增强振动系统的稳定性,设计鲁棒控制器u h2 [25 ] :
u h 2 = 1 K T 2 J o 2 + m o 2 r 2 2 f e 2 s g n s 2 (32)
f e 2 = λ ε 2 , λ e 2 e 2 + 1 , e 2 > δ e 2 ≤ δ
0 < ε 2 < 1 δ > 0 λ > 0
根据式(31)和式(32),异步电机2的相位差滑模控制器u 2 为:
u 2 = K T 1 J o 1 + m o 1 r 1 2 u 1 + T L 1 J o 1 + m o 1 r 1 2 - T L 2 J o 2 + m o 2 r 2 2 - f 1 J o 1 + m o 1 r 1 2 φ ˙ 1 + f 2 J o 2 + m o 2 r 2 2 φ ˙ 2 + c 2 φ ˙ 1 - φ ˙ 2 J o 2 + m o 2 r 2 2 K T 2 + 1 K T 2 J o 2 + m o 2 r 2 2 f e 2 s g n s 2 (33)
s ˙ 2 = - f e 2 s g n s 2 (34)
V 2 = s 2 2 2 (35)
由式(35)可知,当V 2 = 0 s 2 = 0 V 2 > 0 s 2 ≠ 0 式(35)求导,可得:
V ˙ 2 = s 2 s ˙ 2 = - s 2 f e 2 s g n s 2 = - f e 2 s 2 (36)
显然,可得V ˙ 2 ≤ 0 l i m t → ∞ s 2 t = 0 式(30)可得:
c 2 e 2 + e ˙ 2 = 0 (37)
4 双质体振动系统同步仿真分析
根据双质体振动系统的运动微分方程、所设计的控制器以及电源-电机模块,在MATLAB/Simulink环境中建立振动系统的机电-控制仿真模型。为了检验所设计控制器的可行性和鲁棒性,首先,讨论在自同步状态(即控制器不介入)下弹簧刚度对振动系统同步特性的影响;然后,对自同步状态下不能同步以及同步相位差不能实现0或π的工况进行控制同步仿真;最后,对比自同步仿真与控制同步仿真的结果。双质体振动系统和异步电机的参数设置参见表1 和表2 。
4.1 自同步仿真分析
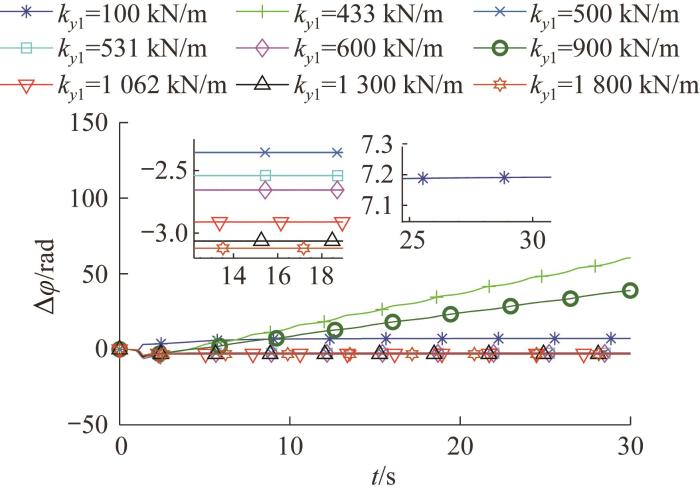
图3 所示为自同步状态下弹簧刚度不同时双质体振动系统的相位差随时间的变化曲线,图中曲线最终收敛说明振动系统实现了自同步运动。从图3 中可以看出,该振动系统的运动呈现3种状态:1)相位差Δ φ = 0 . 91 r a d - 3.12 ≤ Δ φ ≤ - 2 . 35 r a d k y 1 ky 1 =443 kN/m时,相位差曲线发散,根据式(12),此时Y 方向的固有频率与激振频率相同,均为157 rad/s;当ky 1 =900 kN/m时,相位差曲线也发散,此时X 方向的固有频率为146.3 rad/s,略小于激振频率157 rad/s;当ky 1 =1 062 kN/m,相位差曲线收敛,此时X 方向的固有频率与激振频率相同。结果表明,当X 方向共振时,双质体振动系统可以实现同步运动,此时其相位差Δ φ = - 2 . 90 r a d
图3
图3
不同弹簧刚度下双质体振动系统的相位差仿真结果
Fig.3
Phase difference simulation results of double-mass vibration system under different spring stiffness
通过仿真得到ky 1 =443 kN/m和ky 1 =1 062 kN/m时双质体振动系统的响应和异步电机的转速,结果分别如图4 和图5 所示。由图可知,当ky 1 =443 kN/m时,异步电机不能以恒定的转速运转,其转速在149.4 ~ 158 . 1 r a d / s ky 1 =1 062 kN/m时,异步电机的转速在151.4 ~ 152 . 4 r a d / s
图4
图4
ky 1 =443 kN/m时双质体振动系统的自同步仿真结果
Fig.4
Self-synchronization simulation results of double-mass vibration system with ky 1 =443 kN/m
图5
图5
ky 1 =1 062 kN/m时双质体振动系统的自同步仿真结果
Fig.5
Self-synchronization simulation results of double-mass vibration system with ky 1 =1 062 kN/m
4.2 控制同步仿真
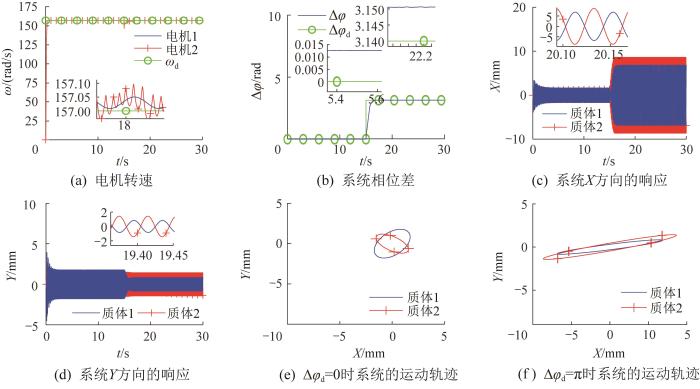
分别采用图4 和图5 对应的参数对双质体振动系统的异步电机进行滑模矢量控制,得到ky 1 =443 kN/m和ky 1 =1 062 kN/m时振动系统的控制同步仿真结果,分别如图6 和图7 所示。其中:主电机的目标转速ω d = 157 r a d / s Δ φ d = 0 t =15 s时目标相位差Δ φ d = π 图6 和图7 可知,相位差曲线最终趋于收敛,双质体振动系统各个方向的振幅恒定,说明其处于稳定的同步运转状态。根据图6 (a)、(b)和图7 (a)、(b),可知所设计的控制器的跟踪效果良好。
图6
图6
ky 1 =443 kN/m时双质体振动系统的控制同步仿真结果
Fig.6
Control synchronization simulation results of double-mass vibration system with ky 1 =443 kN/m
图7
图7
ky 1 =1 062 kN/m时双质体振动系统的控制同步仿真结果
Fig.7
Control synchronization simulation results of double-mass vibration system with ky 1 =1 062 kN/m
对比图4 和图6 可知,通过对异步电机进行滑模矢量控制可使原本不能同步运转的双质体振动系统同步运转且可以调节相位差。对比图6 (e)和图6 (f)所示的振动系统的稳定运动轨迹可知,当目标相位差为π时振动系统的Y 方向响应显著增大,上、下质体的运动轨迹均为与水平方向夹角大约为60°的椭圆轨迹。
对比图5 和图7 可知,通过对异步电机进行滑模矢量控制可以改变双质体振动系统的相位差。在自同步运转时,振动系统的相位差为-2.90 rad;在控制同步运转时,振动系统的相位差可以为0或π。对比7(e)和图7 (f)可知,当目标相位差为π时,振动系统的X 方向响应显著增大,上、下质体的运动轨迹均为与水平方向夹角大约为10°的椭圆轨迹。
5 结 论
1)本文采用主从控制结构和滑模控制算法分别设计了双质体振动系统的2个异步电机的控制器。同时,在MATLAB/Simulink环境中建立了振动系统的机电-控制仿真模型,并进行了自同步和控制同步仿真。通过对比自同步和控制同步的仿真结果,验证了所设计控制器的可行性和鲁棒性。
2)当Y 方向共振时,双质体振动系统不能实现自同步运动;当X 方向共振时,该振动系统可以实现相位差为- 2 . 90 r a d X 方向的固有频率略小于激振频率(即k y 1 = 900 k N / m
3)所设计的控制器可以使双质体振动系统实现0或π相位差的同步运转。当X 方向和Y 方向共振(即k y 1 = 443 k N / m k y 1 = 1 062 k N / m π
4)X 方向共振的双质体振动系统可用于设计振动运输设备;Y 方向共振的系统可用于设计振动筛分设备。
参考文献
View Option
[2]
闻邦椿 ,刘树英 ,何勍 振动机械的理论与动态设计方法 [M].北京 :机械工业出版社 ,2001 :307 -312 .
[本文引用: 2]
WEN B C LIU S Y HE Q Theory and dynamic design method of vibration machinery [M]. Beijing : China Machine Press , 2001 : 307 -312 .
[本文引用: 2]
[3]
闻邦椿 ,刘树英 ,陈照波 ,等 机械振动理论及应用 [M].北京 :高等教育出版社 ,2009 :64 -84 .
[本文引用: 2]
WEN B C LIU S Y CHEN Z B et al Theory of mechanical vibration and its applications [M]. Beijing : Higher Education Press , 2009 : 64 -84 .
[本文引用: 2]
[4]
阿尔卡季·皮科瓦夫斯基 ,迈克尔·罗森布拉姆 ,于尔根·库尔特斯 同步——非线性科学中的通用概念 [M]. 高宏,胡琦琳,张朋波,等,译.北京 :科学出版社 ,2018 :1 -20 .
[本文引用: 1]
ARKADY P MICHAEL R JÜRGEN K Synchronization: a universal concept in nonlinear sciences [M]. Translated by GAO H, HU Q L, ZHANG P B, et al. Beijing : Science Press , 2018 : 1 -20 .
[本文引用: 1]
[5]
BLEKHMAN I I FRADKOV A L NIJMEIJER H et al On self-synchronization and controlled synchronization
[J]. Systems & Control Letters , 1997 , 31 (5 ): 299 -305 .
[本文引用: 1]
[6]
BLEKHMAN I I FRADKOV A L TOMCHINA O P et al Self-synchronization and controlled synchronization: general definition and example design
[J]. Mathematics and Computers in Simulation , 2002 , 58 (4/6 ): 367 -384 .
[本文引用: 1]
[7]
ZHANG X L WEN B C ZHAO C Y Synchronization of three non-identical coupled exciters with the same rotating directions in a far-resonant vibrating system
[J]. Journal of Sound and Vibration , 2013 , 332 (9 ): 2300 -2317 .
[本文引用: 1]
[8]
ZHANG X L WEN B C ZHAO C Y Experimental investigation on synchronization of three co-rotating non-identical coupled exciters driven by three motors
[J]. Journal of Sound and Vibration , 2014 , 333 (13 ): 2898 -2908 .
[9]
ZHANG X L WEN B C ZHAO C Y Vibratory synchronization transmission of a cylindrical roller in a vibrating mechanical system excited by two exciters
[J]. Mechanical Systems and Signal Processing , 2017 , 96 : 88 -103 .
[本文引用: 1]
[10]
DJANAN A A N NBENDJO B R N Effect of two moving non-ideal sources on the dynamic of a rectangular plate
[J]. Nonlinear Dynamics , 2018 , 92 : 645 -657 .
[本文引用: 1]
[11]
DJANAN A A N NBENDJO B R N WOAFO P Effect of self-synchronization of DC motors on the amplitude of vibration of a rectangular plate
[J]. The European Physical Journal Special Topics , 2014 , 223 (4 ): 813 -825 .
[本文引用: 1]
[12]
贺斌 ,赵春雨 ,闻邦椿 双质体自同步振动系统的动力学耦合特性分析
[J].振动工程学报 ,2016 ,29 (3 ):521 -531 .
[本文引用: 1]
HE B ZHAO C Y WEN B C Analysis of dynamic coupling characteristics for self-synchronization vibrating system with dual-mass
[J]. Journal of Vibration Engineering , 2016 , 29 (3 ): 521 -531 .
[本文引用: 1]
[13]
ZHAO C Y HE B LIU J J et al Design method of dynamic parameters of a self-synchronization vibrating system with dual mass
[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics , 2018 , 232 (1 ): 3 -20 .
[本文引用: 1]
[14]
KONG X X CHEN C Z WEN B C Composite synchronization of three eccentric rotors driven by induction motors in a vibrating system
[J]. Mechanical Systems and Signal Processing , 2018 , 102 : 158 -179 .
[本文引用: 1]
[15]
KONG X X ZHANG X L CHEN X Z et al Phase and speed synchronization control of four eccentric rotors driven by induction motors in a linear vibratory feeder with unknown time-varying load torques using adaptive sliding mode control algorithm
[J]. Journal of Sound and Vibration , 2016 , 370 : 23 -42 .
[本文引用: 1]
[16]
FANG P WANG Y G HOU Y J et al Synchronous control of multi-motor coupled with pendulum in a vibration system
[J]. IEEE Access , 2020 , 8 : 51964 -51975 .
[本文引用: 4]
[17]
FANG P WANG Y G ZOU M et al Combined control strategy for synchronization control in multi-motor-pendulum vibration system
[J]. Journal of Vibration and Control , 2022 , 28 (17/18 ): 2254 -2267 .
[18]
ZOU M FANG P HOU Y J et al Synchronization analysis of two eccentric rotors with double-frequency excitation considering sliding mode control
[J]. Communications in Nonlinear Science and Numerical Simulation , 2021 , 92 : 105458 .
[本文引用: 4]
[19]
黄志龙 ,张众超 ,楚树坡 ,等 四激振器激励下振动机械-物料系统同步控制
[J].振动、测试与诊断 ,2021 ,41 (3 ):462 -469 .
[本文引用: 1]
HUANG Z L ZHANG Z C CHU S P et al Synchronous control of vibrating machinery–material system under excitation of four exciters
[J]. Journal of Vibration , Measurement & Diagnosis, 2021 , 41 (3 ): 462 -469 .
[本文引用: 1]
[20]
HUANG Z L SONG G Q LI Y M et al Synchronous control of two counter-rotating eccentric rotors in nonlinear coupling vibration system
[J]. Mechanical Systems and Signal Processing , 2019 , 114 : 68 -83 .
[本文引用: 1]
[21]
张康 ,王丽梅 ,方馨 基于耦合参数辨识的直驱H型平台反馈线性化解耦同步控制
[J].中国电机工程学报 ,2022 ,42 (5 ):1992 -2000 .
[本文引用: 1]
ZHANG K WANG L M FANG X direct drive H-type platform feedback linearization decoupling synchronous control based on coupling parameter identification
[J]. Proceedings of the CSEE , 2022 , 42 (5 ): 1992 -2000 .
[本文引用: 1]
[22]
张康 ,王丽梅 基于反馈线性化的永磁直线同步电机自适应动态滑模控制
[J].电工技术学报 ,2021 ,36 (19 ):4016 -4024 .
[本文引用: 1]
ZHANG K WANG L M Adaptive dynamic sliding mode control of permanent magnet linear synchronous motor based on feedback linearization
[J]. Transactions of China Electrotechnical Society , 2021 , 36 (19 ): 4016 -4024 .
[本文引用: 1]
[23]
侯勇俊 ,余乐 ,方潘 ,等 双质体三机驱动振动系统同步特性数值模拟
[J].系统仿真学报 ,2016 ,28 (12 ):3066 -3072 .
[本文引用: 1]
HOU Y J YU L FANG P et al Numerical simulation on self-synchronization of double mass vibrating system with tri-exciter
[J]. Journal of System Simulation , 2016 , 28 (12 ): 3066 -3072 .
[本文引用: 1]
[24]
陈坚 交流电机数学模型及调速系统 [M].北京 :国防工业出版社 ,1989 :40 -114 .
[本文引用: 1]
CHEN J Mathematical model and speed adjustment system of alternating motors [M]. Beijing : National Defense Industry Press , 1989 : 40 -114 .
[本文引用: 1]
[25]
[本文引用: 1]
ZHAO F LUO W GAO F Y et al An improved sliding mode control for pmsm considering sliding mode chattering and disturbance compensation
[J]. Journal of Xi’an Jiaotong University , 2020 , 54 (6 ): 28 -35 .
DOI:10.7652/xjtuxb202006004
[本文引用: 1]
2
2001
... 在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] .其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] .自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定.因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求.这2个问题将直接影响振动系统的响应. ...
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
2
2001
... 在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] .其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] .自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定.因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求.这2个问题将直接影响振动系统的响应. ...
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
2
2009
... 在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] .其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] .自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定.因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求.这2个问题将直接影响振动系统的响应. ...
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
2
2009
... 在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] .其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] .自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定.因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求.这2个问题将直接影响振动系统的响应. ...
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
1
2018
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
1
2018
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
On self-synchronization and controlled synchronization
1
1997
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Self-synchronization and controlled synchronization: general definition and example design
1
2002
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Synchronization of three non-identical coupled exciters with the same rotating directions in a far-resonant vibrating system
1
2013
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Experimental investigation on synchronization of three co-rotating non-identical coupled exciters driven by three motors
0
2014
Vibratory synchronization transmission of a cylindrical roller in a vibrating mechanical system excited by two exciters
1
2017
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Effect of two moving non-ideal sources on the dynamic of a rectangular plate
1
2018
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
聚氨酯高频振动筛的研制
1
2003
... 在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] .其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] .自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定.因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求.这2个问题将直接影响振动系统的响应. ...
聚氨酯高频振动筛的研制
1
2003
... 在煤炭、化工、建筑和粮食等领域,振动机械常被用于输送、筛分、干燥物料[1 ] .其中,自同步振动筛因结构简单、维护方便而被广泛应用[2 -3 ] .自同步是指2个或多个偏心转子无需刚性连接即可实现同转速运转,即转子间的相位差保持恒定.因此,在利用同步现象之前必须解决2个问题:一个是振动系统能否实现同步运动,另一个是在同步运动过程中的相位差是否满足要求.这2个问题将直接影响振动系统的响应. ...
Effect of self-synchronization of DC motors on the amplitude of vibration of a rectangular plate
1
2014
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
双质体自同步振动系统的动力学耦合特性分析
1
2016
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
双质体自同步振动系统的动力学耦合特性分析
1
2016
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Design method of dynamic parameters of a self-synchronization vibrating system with dual mass
1
2018
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Composite synchronization of three eccentric rotors driven by induction motors in a vibrating system
1
2018
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Phase and speed synchronization control of four eccentric rotors driven by induction motors in a linear vibratory feeder with unknown time-varying load torques using adaptive sliding mode control algorithm
1
2016
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Synchronous control of multi-motor coupled with pendulum in a vibration system
4
2020
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
... 本文通过对2个异步电机进行矢量控制来实现其同步运转.异步电机的矢量控制原理如图2 所示.参照文献[16 -18 ],采用主从控制结构和滑模控制算法分别设计2个异步电机的控制器:对于电机1,只控制其转速;对于电机2,只控制其与电机1之间的相位差.由此可实现2个异步电机的0或π相位差同步运转. ...
... 对s 1 [16 -18 ] : ...
... 设计滑模函数s 2 [16 -18 ] : ...
Combined control strategy for synchronization control in multi-motor-pendulum vibration system
0
2022
Synchronization analysis of two eccentric rotors with double-frequency excitation considering sliding mode control
4
2021
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
... 本文通过对2个异步电机进行矢量控制来实现其同步运转.异步电机的矢量控制原理如图2 所示.参照文献[16 -18 ],采用主从控制结构和滑模控制算法分别设计2个异步电机的控制器:对于电机1,只控制其转速;对于电机2,只控制其与电机1之间的相位差.由此可实现2个异步电机的0或π相位差同步运转. ...
... 对s 1 [16 -18 ] : ...
... 设计滑模函数s 2 [16 -18 ] : ...
四激振器激励下振动机械-物料系统同步控制
1
2021
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
四激振器激励下振动机械-物料系统同步控制
1
2021
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
Synchronous control of two counter-rotating eccentric rotors in nonlinear coupling vibration system
1
2019
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
基于耦合参数辨识的直驱H型平台反馈线性化解耦同步控制
1
2022
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
基于耦合参数辨识的直驱H型平台反馈线性化解耦同步控制
1
2022
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
基于反馈线性化的永磁直线同步电机自适应动态滑模控制
1
2021
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
基于反馈线性化的永磁直线同步电机自适应动态滑模控制
1
2021
... 自同步现象最早由Huygens于1665年发现[4 ] ,他观察到2个悬挂在薄板上的钟摆在摇动一段时间后可以同步摆动.进入20世纪后,Blekhman等[5 -6 ] 对2个偏心转子的同步运动进行了研究,并提出了自同步理论;闻邦椿等[2 -3 ] 分析了振动机械的自同步特性,并将相关理论应用到工程实践中.近年来,Zhang等[7 -9 ] 采用改进的小参数方法分别对由2个和多个激振电机驱动的振动系统进行了理论和实验研究;Djanan等[10 -11 ] 研究了一种激振电机在平板上运动的振动系统的同步运动;贺斌等[12 -13 ] 对一种2个激振电机安装在同一个质体上的双质体振动系统进行了研究.与此同时,学者们纷纷开展了多电机驱动振动系统的控制同步研究.Kong等[14 -15 ] 研究了由多个激振电机驱动的振动系统的控制同步运动及其索末菲(Sommerfeld)效应.Fang等[16 -18 ] 提出了转子耦合摆振动系统,并对其自同步运动和控制同步运动进行了深入的研究.黄志龙等[19 -20 ] 在考虑物料影响的情况下,采用相邻交叉耦合控制策略对多种多电机驱动的振动系统进行了控制同步研究.张康等[21 -22 ] 采用不同的滑模控制策略对多个直线电机进行了同步控制并开展了实验研究. ...
双质体三机驱动振动系统同步特性数值模拟
1
2016
... 然而,上述文献的研究对象主要是激振电机安装在同一质体上的振动系统,而较少涉及激振电机安装在不同质体上的振动系统.为了减小地基载荷、占地面积以及实现对物料的多级筛分,侯勇俊等[23 ] 提出了一种激振电机(异步电机)安装在不同质体上的双质体振动系统,并对其同步性展开了研究.结果表明:一些结构参数对振动系统的同步相位差有显著影响,在部分参数条件下振动系统甚至不能实现自同步运转,这均会影响振动系统的稳态响应和工作效率. ...
双质体三机驱动振动系统同步特性数值模拟
1
2016
... 然而,上述文献的研究对象主要是激振电机安装在同一质体上的振动系统,而较少涉及激振电机安装在不同质体上的振动系统.为了减小地基载荷、占地面积以及实现对物料的多级筛分,侯勇俊等[23 ] 提出了一种激振电机(异步电机)安装在不同质体上的双质体振动系统,并对其同步性展开了研究.结果表明:一些结构参数对振动系统的同步相位差有显著影响,在部分参数条件下振动系统甚至不能实现自同步运转,这均会影响振动系统的稳态响应和工作效率. ...
1
1989
... 交流异步电机的数学模型为非线性高阶系统,其在d -q 坐标系下的电压、磁链方程[24 ] 如下: ...
1
1989
... 交流异步电机的数学模型为非线性高阶系统,其在d -q 坐标系下的电压、磁链方程[24 ] 如下: ...
考虑滑模抖振和扰动补偿的永磁同步电机改进滑模控制
1
2020
... 同理,为了增强振动系统的稳定性,设计鲁棒控制器u h2 [25 ] : ...
考虑滑模抖振和扰动补偿的永磁同步电机改进滑模控制
1
2020
... 同理,为了增强振动系统的稳定性,设计鲁棒控制器u h2 [25 ] : ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}