


李栋[4-5]介绍了基于模块化设计思路研制的ZDY3500T型分体式和ZDY3500LT型履带式煤矿用探放水钻机。梁春苗等[6]针对探放水工艺施工的特殊条件,研制了ZDY1300L型浅孔探放水钻机及其配套装置和液压系统。李旺年[7]研发了与掘锚一体机配套使用的机载锚杆钻机,并对钻机的给进装置、回转器及液压系统三个关键部分进行了设计。目前,综掘工作面前探设备普遍采用相对独立的煤矿用液压钻机。钻探时,由人工将液压钻机各组成部件运送至迎头进行组装,组装完成后开始探测工作。钻探过程全由人工完成,探测完成后液压钻机各部件被拆解并搬运至掘进机后方放置[8-10]。整个钻探工作流程复杂,反复装拆、搬运部件的时间多,工人的劳动强度较大,所需人工也较多,这严重影响了掘进工作效率[11-12]。因此,作者设计了一种掘锚一体机机载式探放水钻机。为了全方位了解探放水钻机的工作状态,提高探放水钻机的智能化水平,设计了钻机的远程控制系统,以期为实现自动化、可靠钻进提供有力保障。
1 探放水钻机控制系统总体设计
1.1 探放水钻机介绍
图1
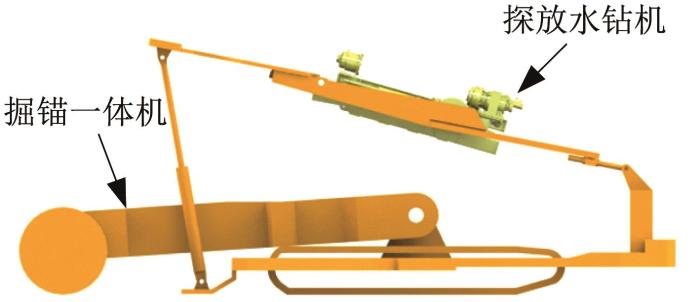
图1
探放水钻机安装位置示意
Fig.1
Schematic of installation position of water exploration and drainage drilling rig
图2

探放水钻机主要由连接平台、框架、动力头、动力头推进油缸、动力头推进轨道、垂直旋转回转驱动、水平回转驱动、支撑立柱、支撑立柱回转驱动和液压夹持器等组成。支撑立柱在探放水钻机不工作时是水平放置的,在探放水钻机工作时由其回转驱动带动至垂直放置,用来支撑钻机,提高钻机作业时的稳定性。
1.2 控制系统结构
探放水钻机自动电控系统的总体架构如图3所示。其主要包括探放水钻机状态自动感知单元、钻机作业自动控制单元、钻机作业执行机构单元和人机界面单元等。
图3
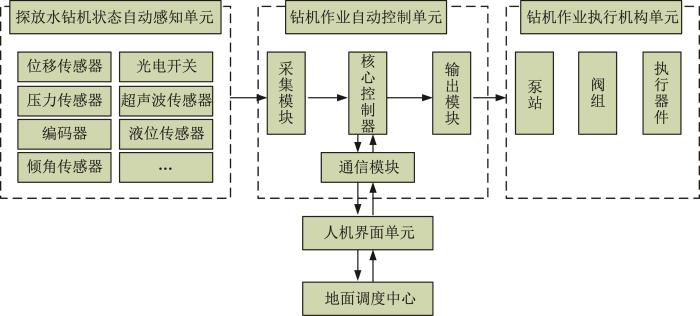
图3
探放水钻机自动电控系统总体架构
Fig.3
General structure of automatic electric control system for water exploration and drainage drilling rig
2 探放水钻机控制系统硬件设计
表1 探放水钻机控制系统主要监测传感器的型号及量程
Table 1
| 序号 | 监测量 | 传感器类型 | 型号 | 量程 |
|---|---|---|---|---|
| 1 | 一级伸缩油缸位移 | 位移传感器 | 1 200 mm | |
| 2 | 二级伸缩油缸位移 | GUC1200B | ||
| 3 | 钻机进给油缸位移 | |||
| 4 | 垂直旋转回转驱动所调节的整机倾角 | 矿用本安型倾角传感器 | GUD90(A) | -45°~45° |
| 5 | 水平回转驱动所调节的整机水平转角 | 矿用本安型编码器 | BQH24 | |
| 6 | 支撑立柱下段油缸压力 | 油压力传感器 | 0~30 MPa | |
| 7 | 支撑立柱上段油缸压力 | |||
| 8 | 动力头旋转载荷 | GPD60 | ||
| 9 | 动力头推进载荷 | |||
| 10 | 系统总压力 | |||
| 11 | 掘锚一体机倾角 | 矿用本安型倾角传感器 | GUD90(A) | -45°~45° |
| 12 | 掘锚一体机水平距离 | 超声波测距传感器 | GUC6 | 6 000 mm |
| 13 | 设备振动加速度 | 矿用本安型振动传感器 | GBC80(A) | -80~80 m/s2 |
| 14 | 掘锚一体机振动加速度 |
表2 电磁防爆阀组的型号和参数
Table 2
| 序号 | 功能 | 型号 | 流量/(L/min) |
|---|---|---|---|
| 进油联 | STPSV55C2C/240-3 | 200 | |
| 第1联 | 动力头旋转马达控制 | -42H100/100NN/EA2 | 100 |
| 第2联 | 动力头推进油缸控制 | ||
| 第3联 | 俯仰姿态调整马达控制 | -32H80/80NN/EA2 | 80 |
| 第4联 | 水平姿态调整马达控制 | ||
| 第5联 | 一级伸缩油缸位移控制 | ||
| 第6联 | 二级伸缩油缸位移控制 | ||
| 第7联 | 支撑立柱旋转油缸控制 | ||
| 第8联 | 支撑立柱油缸控制 | ||
| 尾联 | -E1-G24MA-10m |
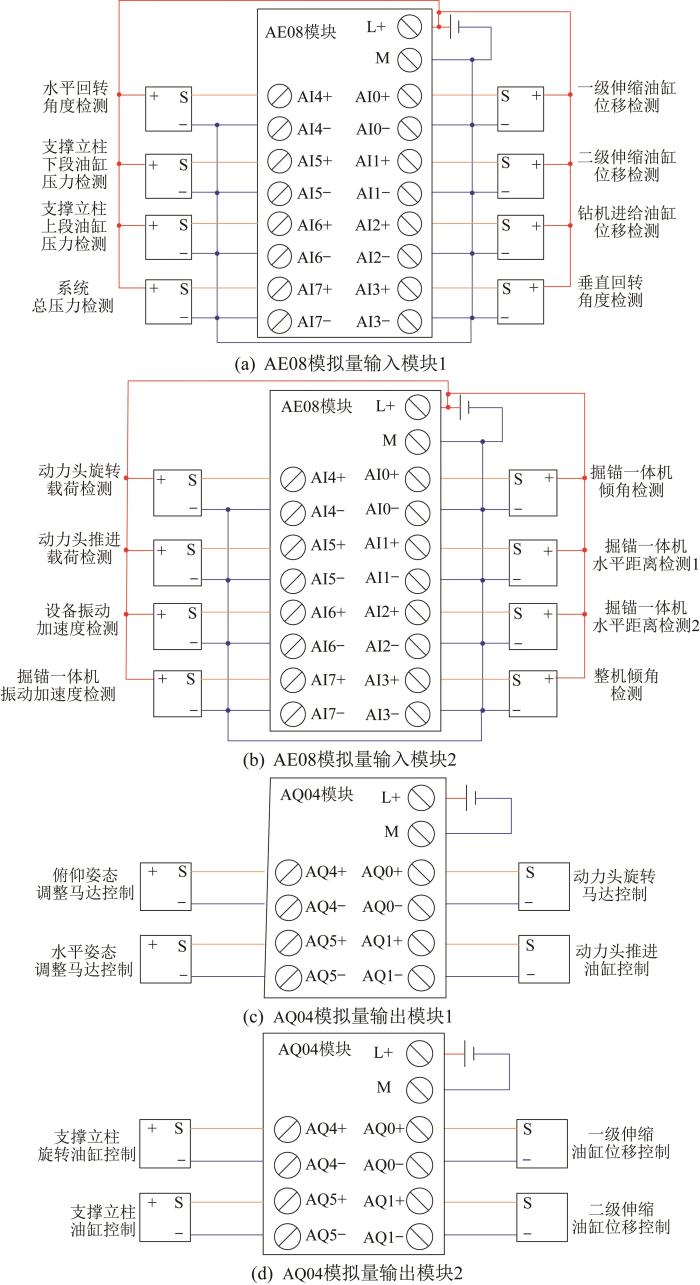
探放水钻机控制系统核心采用西门子S7-200SmartPLC。
综合以上分析,系统采用1个ST20CPU模块、1个EM DT16数字量输入/输出模块、2个EM AE08模拟量输入模块以及2个EM AQ04模拟量输出模块。PLC(programmable logic controller,可编程逻辑控制器)控制系统主要模块的接线如图4所示。
图4
3 探放水钻机控制系统工作流程
3.1 总体工作流程
钻探控制分为手动控制和自动控制两种运行模式。在手动控制模式下,操作人员在操作台手动操作电磁阀组,控制钻机姿态和钻探作业;在自动控制模式下,只需操作人员一键启动,钻机即可自动调节钻机的位置和姿态进行自动钻孔作业,在特殊情况下,可由人工进行干预,防止发生意外。钻杆的更换则需要人工。
钻探作业流程如图5所示。
图5

3.2 钻进深度和钻杆数量自动记录流程
无论是手动钻探控制还是自动钻探控制,都须对钻进深度以及煤壁中钻杆的数量进行自动计算,因此设计了钻进深度和钻杆数量自动记录子程序。自动记录流程如图6所示。
图6
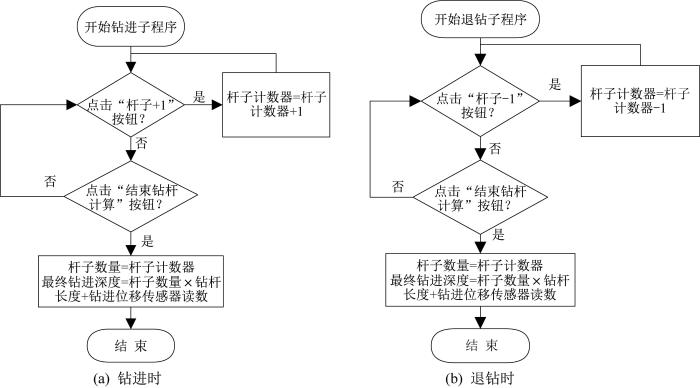
图6
钻进深度和钻杆数量自动记录流程
Fig.6
Automatic recording process of drilling depth and drill pipe quantity
钻进时,实时钻杆数量等于PLC控制系统中钻杆计数器的数量,实时钻进深度=钻杆数量×钻杆长度+钻进位移传感器读数。退钻时,实时钻杆数量等于PLC中钻杆计数器的数量,存留钻杆长度=记录的钻进深度-钻杆数量×钻杆长度-钻进位移传感器读数。
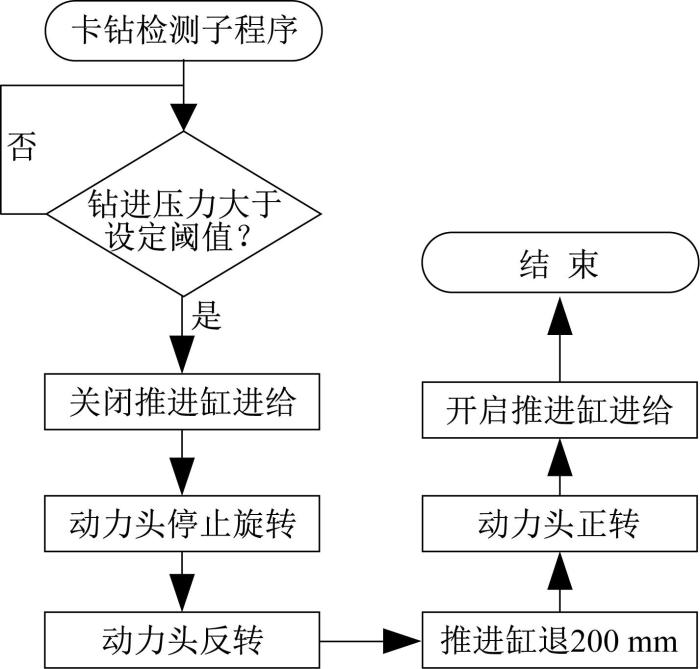
3.3 卡钻处理流程
结合现场施工经验可知,卡钻原因主要为:1)排渣不畅;2)裂隙卡钻。因此设计了卡钻处理程序,以及时解决卡钻情况。卡钻处理流程如图7所示。通过压力传感器实时检测钻进压力,当钻进压力超过设定阈值时,控制动力头反转且推进机构回退,以消除卡钻现象,防止卡钻对钻机造成损坏。待钻机回退后压力降低,再次令动力头正转,推进钻机继续进行钻探作业。
图7
4 探放水钻机控制系统的测试与分析
对所研制的掘锚一体机机载式探放水钻机及其控制系统进行出厂前的厂内功能性试验。由于采用的油缸缸径较小,采用位移传感器外置的方式对油缸行程进行实时测量。外置式油缸位移传感器的安装方式如图8所示。
图8

图8
外置式油缸位移传感器安装方式
Fig.8
Installation mode of external oil cylinder displacement sensor
掘锚一体机机载式探放水钻机的监控界面如图9所示。通过人机界面的存储功能实时记录和上传探放水钻机工作时的设备状态数据和钻进深度等。
图9

图9
掘锚一体机机载式探放水钻机监控界面
Fig.9
Monitoring interface of airborne water exploration and drainage drilling rig of excavating and anchoring all-in-one machine
在国能包头能源有限责任公司李家壕煤矿进行现场测试,得到了在不同钻进速度下钻机的钻进载荷和钻进扭矩,如图10所示。由图可知,钻进载荷和钻进扭矩均基本与钻进速度成线性关系,即钻进速度越高,钻进载荷和钻进扭矩越大。
图10

图10
掘锚一体机机载式探放水钻机现场测试结果
Fig.10
Field test results of airborne water exploration and drainage drilling rig of excavating and anchoring all-in-one machine
同时,在李家壕煤矿的31115辅运顺槽掘进工作面对机载式探放水钻机进行现场工业性试验。利用早班检修时间,进行80~100 m探放水钻孔作业,即探放水钻孔作业不占用掘进作业时间。安装在掘锚一体机上的探放水钻机用于准备工作的时间比分离的坑道探放水钻机减少80%。根据现场反馈,所研发的探放水钻机具有较好的应用和推广价值。
5 结 论
1)研制了掘锚一体机机载式探放水钻机控制系统。通过系统软硬件设计,实现了钻机作业自动化。
2)设计了钻进深度和钻杆数量自动记录程序,实现了钻进深度的自动测量,为自动装卸钻杆的设计提供了依据。
3)通过厂内和井下工业性试验验证了所设计的探放水钻机控制系统的可行性。
参考文献
双臂钻机在掘进工作面探放水钻孔施工中的应用
[J].
Application of twin boom rig in water exploration and discharge drilling of heading face
[J].
双臂窄体分体式履带钻机研制
[J].
Development of narrow-body split crawler drilling rig with twin boom
[J].
掘进巷道超前钻探设计应用
[J].
Design and application of advanced drilling in the driving roadway
[J].DOI:10.16525/j.cnki.cn14-1167/tf.2021.03.42 [本文引用: 1]
煤矿用探放水钻机及其关键技术
[J].
Mine-used water exploration and drainage drilling rigs and key technologies
[J].DOI:10.13347/j.cnki.mkaq.2017.07.032 [本文引用: 1]
ZDY3500T型煤矿用中深孔探放水钻机的研制
[J].
Development of ZDY3500T drilling rig for water detection and drainage through medium-deep hole in coal mines
[J].DOI:10.3969/j.issn.1001-1986.2017.03.028 [本文引用: 1]
矿用浅孔探放水钻机的研制
[J].
Development of mine-used shallow hole water exploration and drainage drilling rig
[J].DOI:10.13347/j.cnki.mkaq.2015.03.025 [本文引用: 1]
掘锚一体机机载锚杆钻机的研制
[J].
Development of bolting machine on anchor excavator machine
[J].DOI:10.13347/j.cnki.mkaq.2021.07.026 [本文引用: 1]
新型探放水钻机的应用研究
[J].
Application of new drilling and discharge drilling rig
[J].
煤矿坑道双动力头钻机检测平台设计
[J].
Design of testing platform for double power head drilling rig in coal mine tunnel
[J].
煤矿探放水钻孔倾角定位的误差分析
[J].
Error analysis of dip angle location of water exploration and drainage boreholes in coal mine
[J].DOI:10.3969/j.issn.1008-3731.2019.04.012 [本文引用: 1]
煤矿用双臂探放水钻机给进机构的设计
[J].
Design of feeding mechanism of drilling rig with twin boom for water exploration and drainage in coal mine
[J].DOI:10.13436/j.mkjx.201905003 [本文引用: 1]
ZDY2-1000LF型探放水钻机的研制及应用
[J].
Development and application of ZDY2-1000LF drilling rig for water exploration and drainage
[J].DOI:10.11799/ce201904031 [本文引用: 1]
掘进机机载钻机机身设计与仿真分析
[J].
Design and simulation analysis of feeding body of drilling digs machine
[J].DOI:10.3969/j.issn.1003-0794.2011.08.001 [本文引用: 1]
大角度多层孔履带式全液压坑道钻机的研制与应用
[J].
Development and application of the track-mounted hydraulic tunnel drilling rig for wide-angle and multi-layer holes
[J].DOI:10.11799/ce201412041 [本文引用: 1]
孔‒井‒地”一体化智能钻进系统及关键技术
[J].
“Hole-well-ground” integrated intelligent drilling system and key technologies
[J].
煤矿井下智能化定向钻探发展路径与关键技术分析
[J].
Development path and key technology analysis of intelligent directional drilling in underground coal mine
[J].
ZDY4300LK 井下自动钻机在大佛寺煤矿的试验研究
[J].
Test and research on ZDY4300LK underground automatic drilling rig in Dafosi coal mine
[J].
ZYWL-4000SY 型遥控钻机设计及关键技术研究
[J].
Design and key technology research of ZYWL-4000SY remote control drilling rig
[J].
煤矿井下坑道钻机电控自动化技术研究
[J].
Research on electrically controlled automation technology of underground drill rig for coal mine
[J].DOI:10.3969/j.issn.1001-1986.2020.03.031 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}