| Reliability and Quality Design |
|

|
|
|
| Research on speed control for vehicle wheel hub testing based on deep learning |
Hailong WANG( ),Cong YAN(),Jie LIANG ),Cong YAN(),Jie LIANG |
| School of Electromechanical Engineering, Guangdong University of Technology, Guangzhou 510006, China |
|
|
|
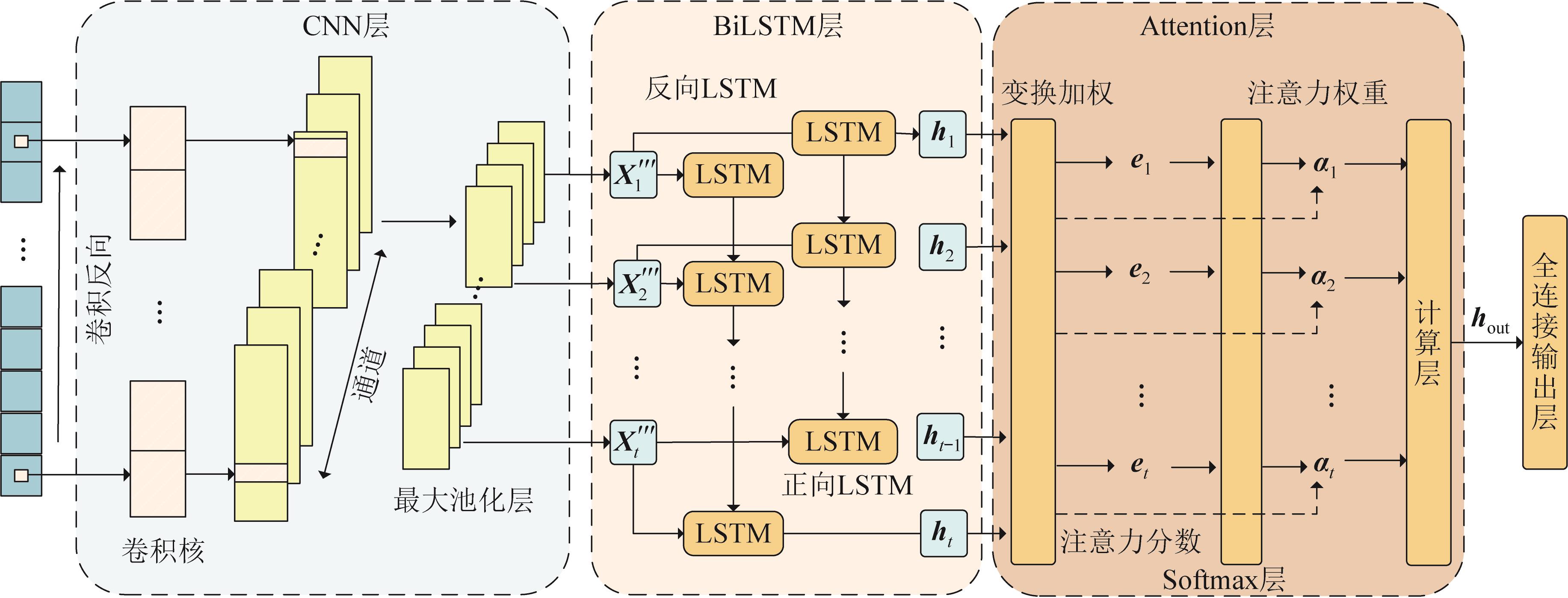
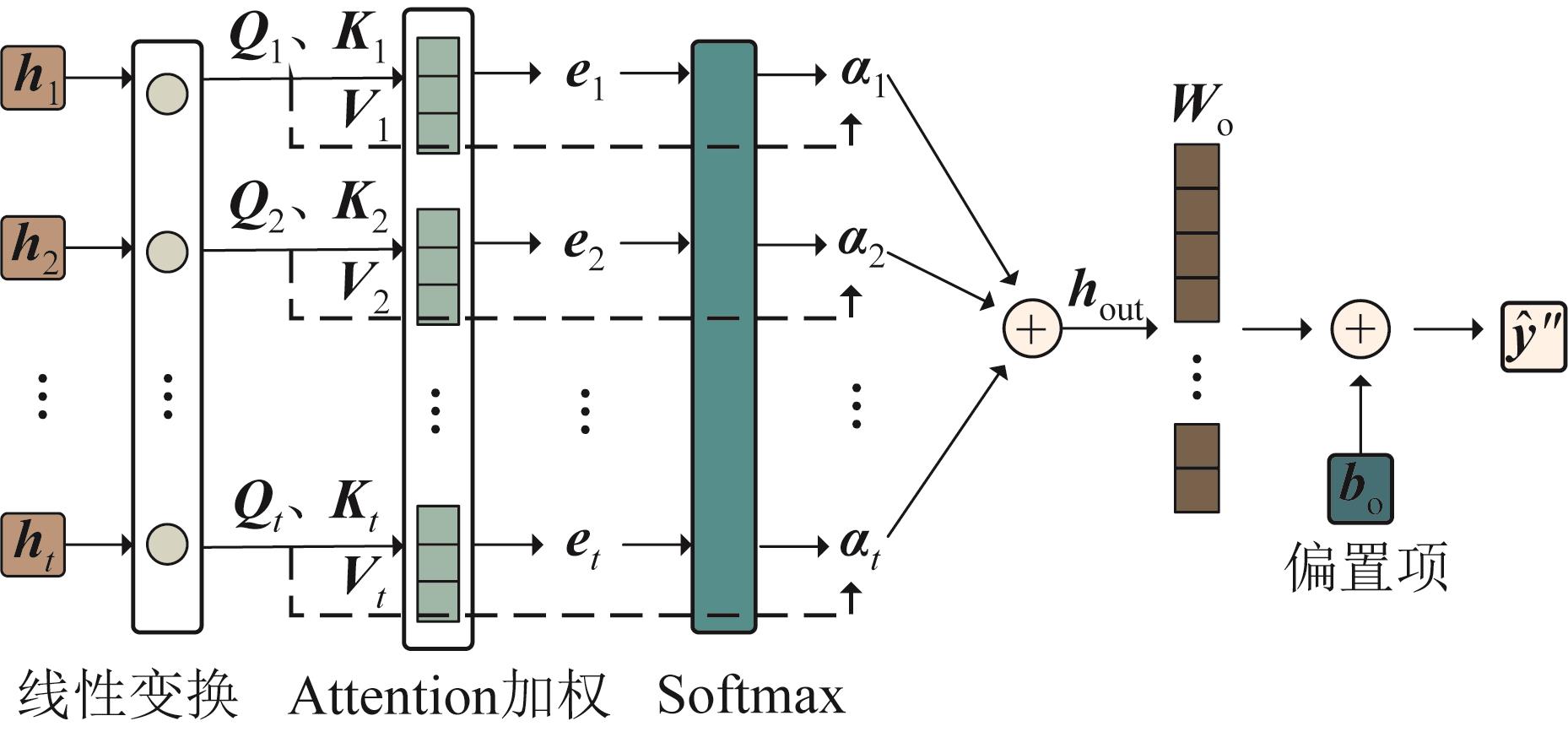
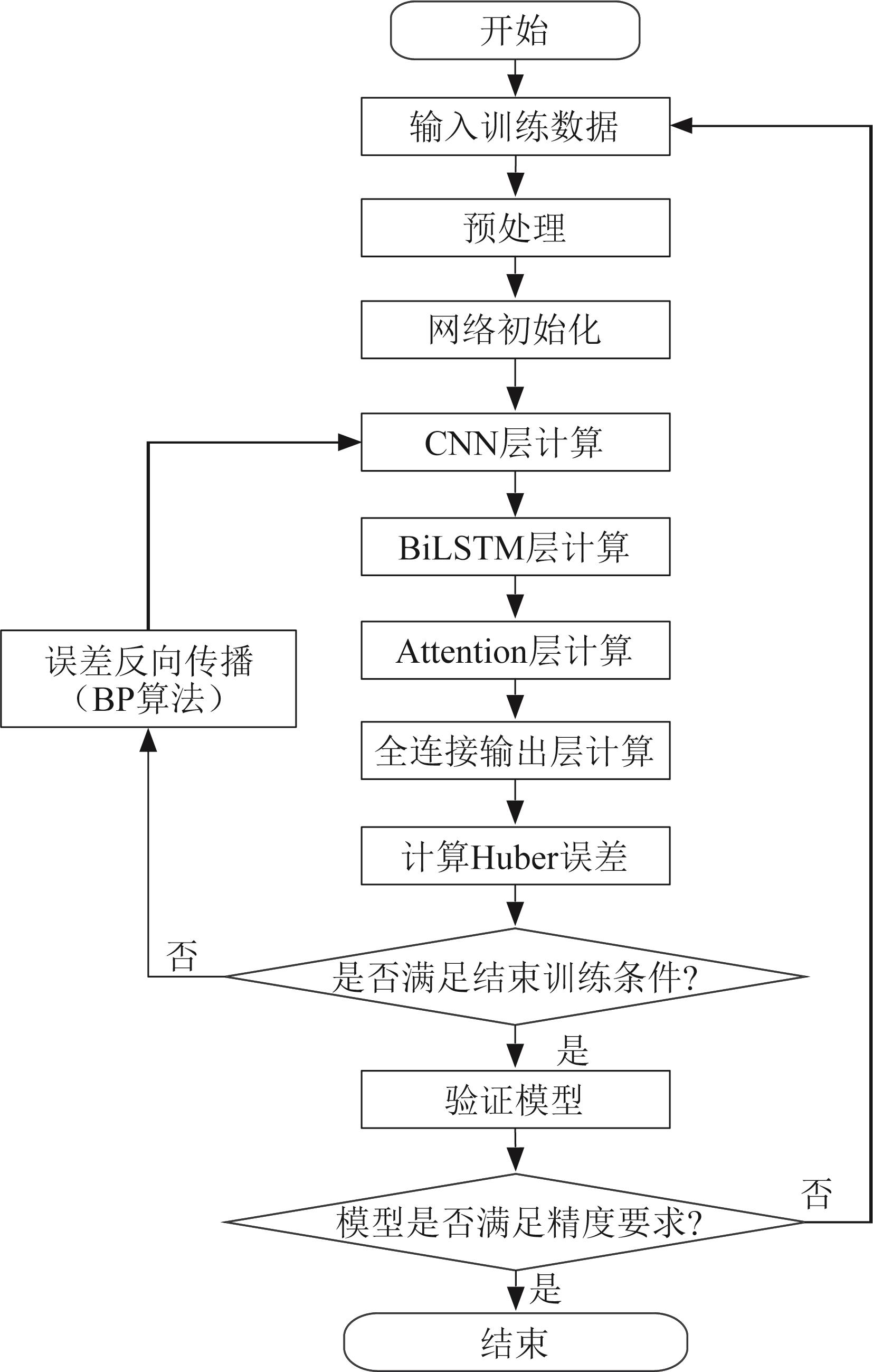
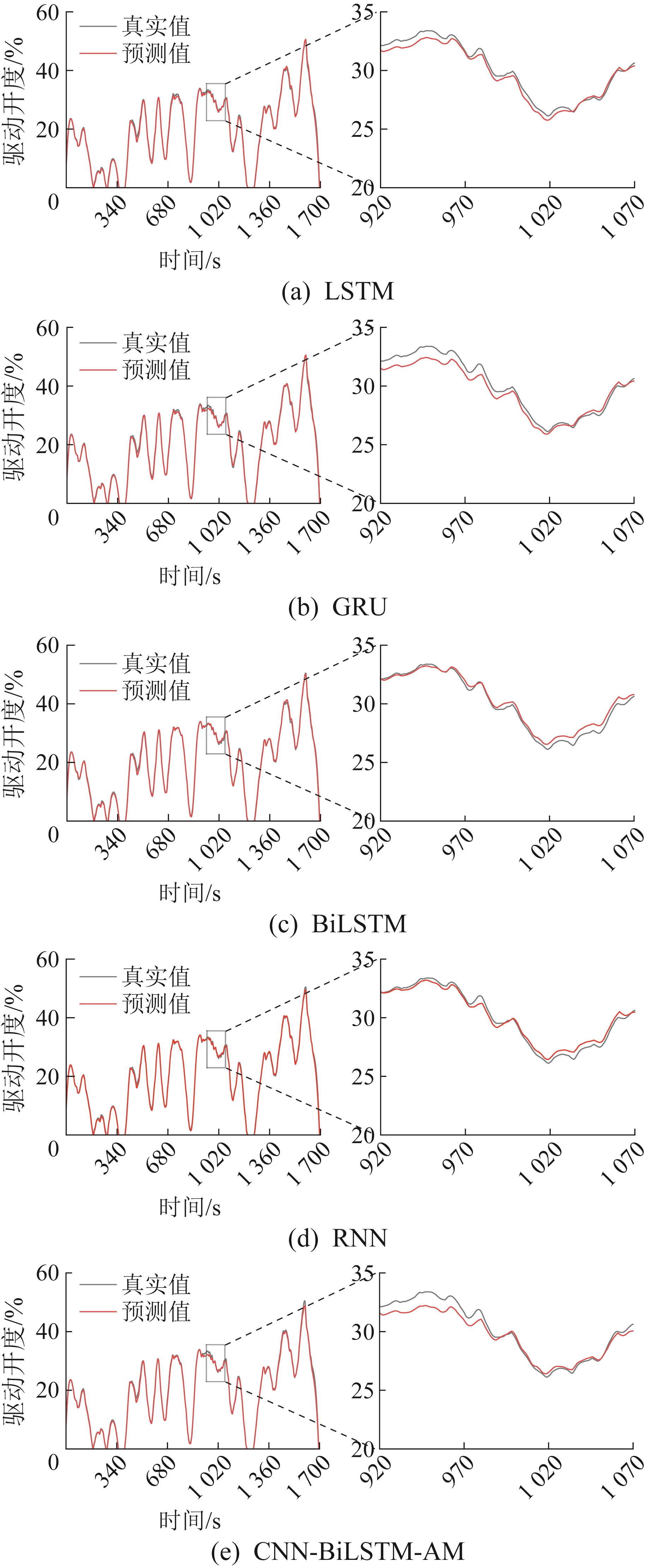
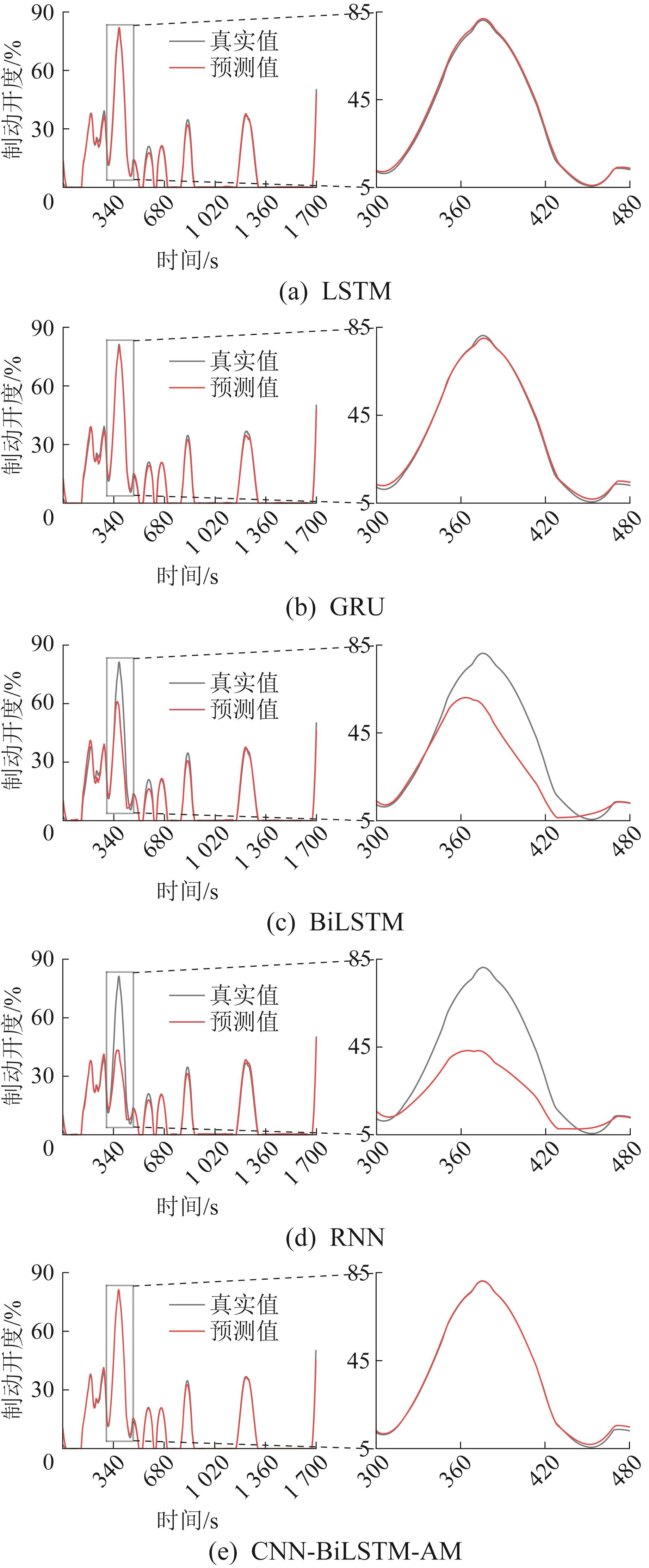
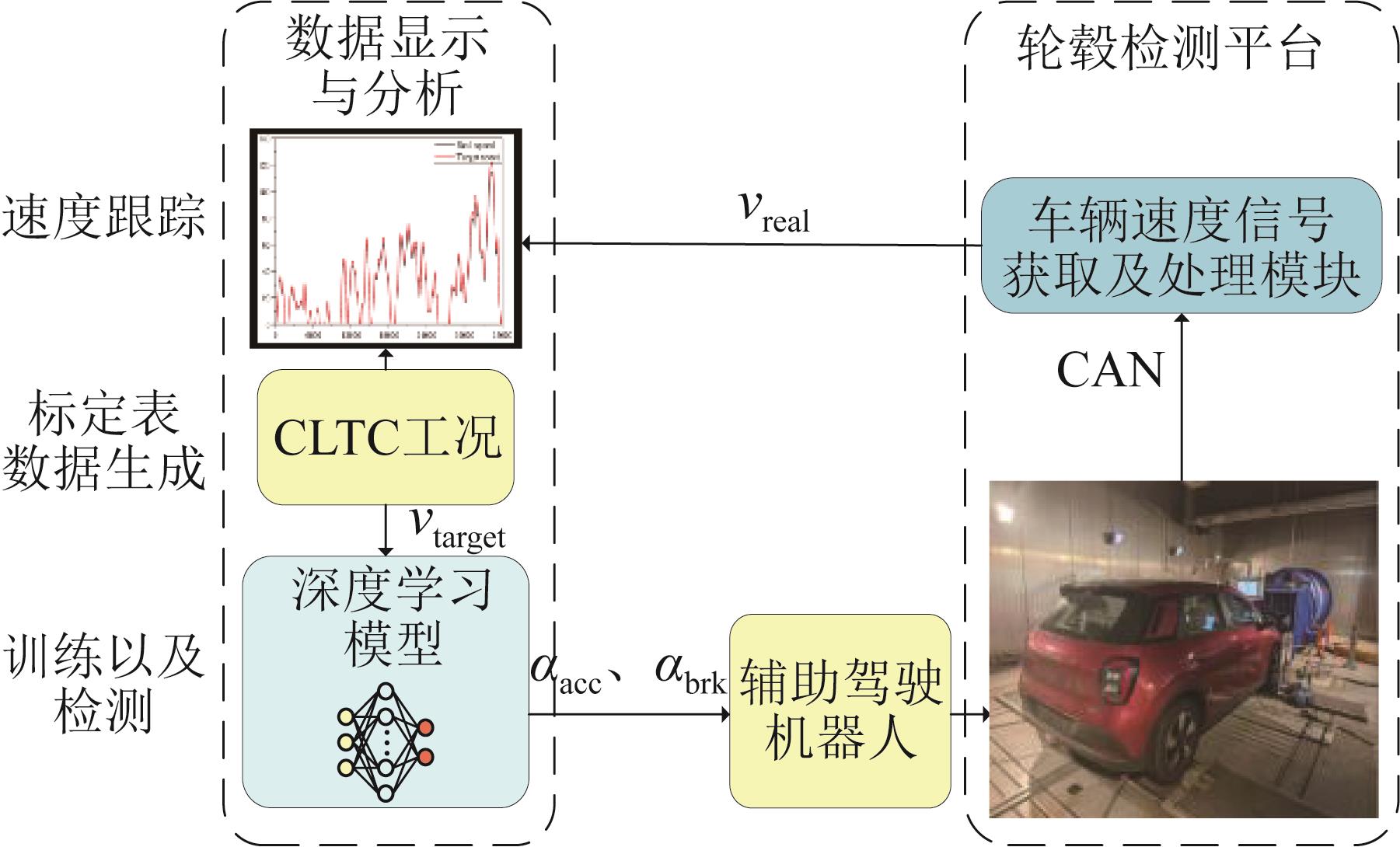
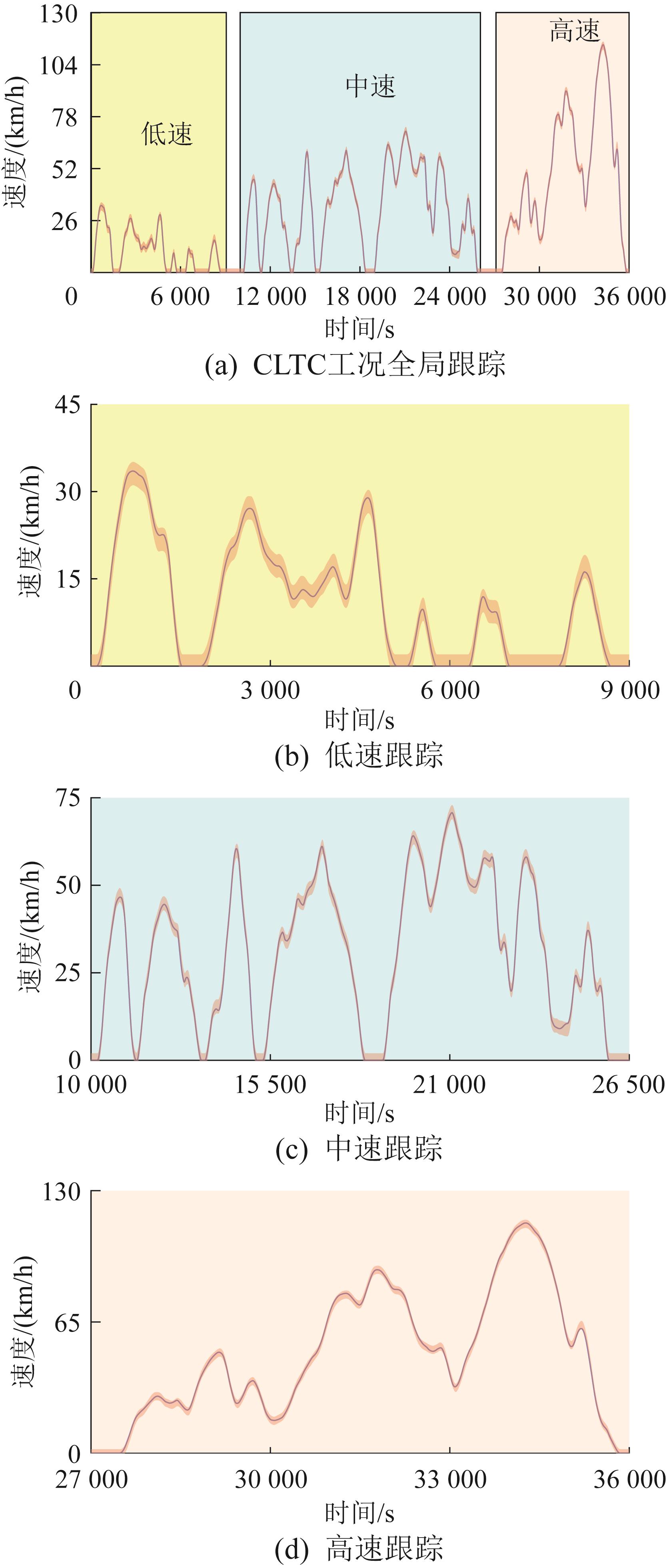
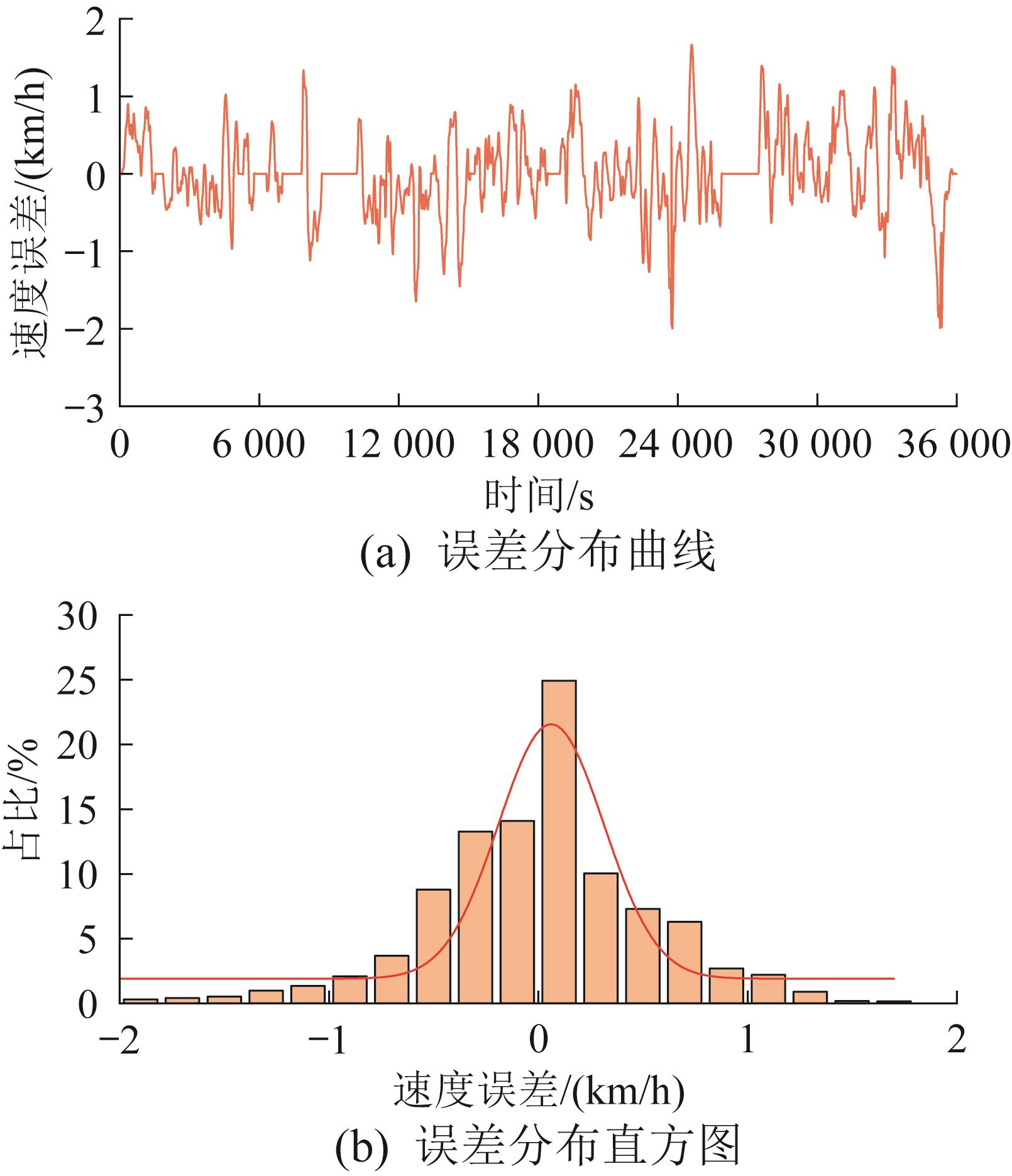
Abstract With the accelerated intelligent transformation of the automotive industry, the wheel hubs, as the core safety components of vehicles, have increasingly higher requirements for detection accuracy and efficiency. However, the existing wheel hub detection methods are longer able to meet the demands for efficient and high-precision automatic detection. To address the shortcomings of high cost, low efficiency, and insufficient accuracy in existing wheel hub detection methods, a hybrid deep learning model (CNN-BiLSTM-AM) combining convolutional neural network (CNN), bidirectional long short-term memory (BiLSTM), and attention mechanism (AM) was proposed. A vehicle longitudinal control model was constructed to realize speed tracking, thereby achieving efficient and high-precision automatic wheel hub detection. When using BiLSTM for data modeling, this model employed CNN to suppress noise to solve the noise sensitivity defect of BiLSTM, and introduced AM to focus on critical information to avoid the issue of losing key features in simple models, thereby improving prediction accuracy. Simulation results showed that compared with traditional RNN (recurrent neural network), LSTM, GRU (gated recurrent unit), the CNN-BiLSTM-AM model achieved an average improvement of 3.17% in determination coefficient R2 and an average reduction of 29.76% in MAE (mean absolute error) in the overall prediction task. Bench test results indicated that the proposed method could effectively complete wheel hub performance detection, achieving high-precision speed tracking while improving detection efficiency. This method provides an efficient solution for the automatic detection of vehicle wheel hubs.
|
|
Received: 18 August 2025
Published: 27 June 2026
|
|
|
|
Corresponding Authors:
Cong YAN
E-mail: wanghl@gdut.edu.cn;2112301005@mail2.gdut.edu.cn
|
基于深度学习的车辆轮毂测试速度控制研究
随着汽车行业向智能化加速转型,轮毂作为车辆的核心安全部件,对检测精度与效率的要求不断提升,现有轮毂检测方法已无法满足高效、高精度的自动化检测需求。针对现有轮毂检测方法存在的成本高、效率低和精度不足等缺陷,提出了一种结合卷积神经网络(convolutional neural network, CNN)、双向长短期记忆网络(bidirectional long short-term memory, BiLSTM)和注意力机制(attention mechanism, AM)的混合深度学习模型(CNN-BiLSTM-AM),并通过构建车辆纵向控制模型完成速度跟踪,实现高效、高精度的轮毂自动检测。该模型在采用BiLSTM对数据进行建模时,利用CNN抑制噪声以解决BiLSTM对噪声敏感的问题,同时引入AM聚焦关键信息以避免简单模型中关键特征易丢失的问题,从而提高预测精度。仿真结果显示,与传统的RNN(recurrent neural network,循环神经网络)、LSTM、GRU(gated recurrent unit,门控循环单元)等模型相比,CNN-BiLSTM-AM模型在整体预测任务中的决定系数R2平均提升了3.17%,MAE(mean absolute error,平均绝对误差)平均降低了29.76%。台架试验结果表明,所提出的方法可有效完成轮毂性能检测,在实现高精度速度跟踪的同时提高了检测效率,这可为车辆轮毂的自动化检测提供高效的解决方案。
关键词:
轮毂检测,
混合深度学习模型,
纵向控制模型,
台架试验,
速度跟踪
|
|
| [[1]] |
ZHU W T, MIAO J, HU J B, et al. Vehicle detection in driving simulation using extreme learning machine[J]. Neurocomputing, 2014, 128: 160-165.
|
|
|
| [[2]] |
张煜焜, 赵早君, 蒋琦峰, 等. 橡胶改性酚醛树脂基摩擦片性能研究[J]. 工程设计学报, 2025, 32(4): 569-578.
ZHANG Y K, ZHAO Z J, JIANG Q F, et al. Research on performance of rubber modified phenolic resin matrix friction plates[J]. Chinese Journal of Engineering Design, 2025, 32(4): 569-578.
|
|
|
| [[3]] |
SHELTON P H, WADLEY H N G. A high temperature engine materials test facility[J]. Review of Scientific Instruments, 2024, 95(4): 045119.
|
|
|
| [[4]] |
徐玉梁, 刘为, 王振, 等. 发动机振动对排气歧管低周疲劳寿命影响研究[J]. 工程设计学报, 2018, 25(3): 330-337.
XU Y L, LIU W, WANG Z, et al. Study on the effect of engine vibration on low cycle fatigue life of exhaust manifold[J]. Chinese Journal of Engineering Design, 2018, 25(3): 330-337.
|
|
|
| [[5]] |
SOLAZZI L, MAZZONI A, CIMA M. Development of an innovative test machine for tyre, wheel and suspension systems for automotive and industrial vehicles[J]. U. Porto Journal of Engineering, 2023, 9(3): 102-120.
|
|
|
| [[6]] |
王恒, 孙小明, 邵彦, 等. 基于试验台架的轮胎测温系统研究[J]. 工程设计学报, 2018, 25(5): 590-596.
WANG H, SUN X M, SHAO Y, et al. Research on tire temperature measurement system based on test bench[J]. Chinese Journal of Engineering Design, 2018, 25(5): 590-596.
|
|
|
| [[7]] |
GAO Y K, HAN J P, FANG J G, et al. Programmed load spectrum for fatigue bench test of a vehicle body[J]. SAE International Journal of Materials and Manufacturing, 2016, 9(3): 605-613.
|
|
|
| [[8]] |
ZHANG J P, YANG H, ZHANG K P, et al. Tracking control for high-speed train with coupler constraints[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(10): 14654-14668.
|
|
|
| [[9]] |
CHEN S P, XIONG G M, CHEN H Y, et al. MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel[J]. Journal of Central South University, 2020, 27(12): 3702-3720.
|
|
|
| [[10]] |
MA Y, DUAN P, SUN Y S, et al. Equalization of lithium-ion battery pack based on fuzzy logic control in electric vehicle[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6762-6771.
|
|
|
| [[11]] |
CHOI A, AHN H, CHUNG Y, et al. Sliding mode control for sensorless speed tracking of PMSM with whale optimization algorithm and extended Kalman filter[J]. Machines, 2023, 11(9): 851.
|
|
|
| [[12]] |
LI Y T, FAN C, QIN H F, et al. Deep reinforcement learning-based feature extraction and encoding for finger-vein verification[J]. IEEE Transactions on Emerging Topics in Computational Intelligence, 2025, 9(1): 522-536.
|
|
|
| [[13]] |
VACHEVA G, STANEV R, HINOV N. Physical model of an electric vehicle for research of dynamic operating modes[C]//2017 15th International Conference on Electrical Machines, Drives and Power Systems. Sofia, Jun. 1-3, 2017.
|
|
|
| [[14]] |
FENG S S, HANG Y, WANG J, et al. Vehicle speed tracking in bench test based on DDPG[C]//2022 6th CAA International Conference on Vehicular Control and Intelligence. Nanjing, Oct. 28-30, 2022.
|
|
|
| [[15]] |
CHENG Y T, LI X J. A compute-intensive service migration strategy based on deep reinforcement learning algorithm[C]//2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference. Chongqing, Jun. 12-14, 2020.
|
|
|
| [[16]] |
TRASK A W. Grokking deep learning[M]. New York: Manning Publications, 2019.
|
|
|
| [[17]] |
SHANTAL M, OTHMAN Z, BAKAR A ABU. A novel approach for data feature weighting using correlation coefficients and Min-Max normalization[J]. Symmetry, 2023, 15(12): 2185.
|
|
|
| [[18]] |
LU W J, LI J Z, WANG J Y, et al. A CNN-BiLSTM-AM method for stock price prediction[J]. Neural Computing and Applications, 2021, 33(10): 4741-4753.
|
|
|
| [[19]] |
王开松, 魏一鸣, 唐威, 等. 基于CNN-LSTM-Attention模型的湿喷台车泵送系统堵管故障预测方法[J]. 工程设计学报, 2025, 32(6): 759-768.
WANG K S, WEI Y M, TANG W, et al. Fault prediction method of pipeline blockage in wet spray trolley pumping system based on CNN-LSTM-Attention model[J]. Chinese Journal of Engineering Design, 2025, 32(6): 759-768.
|
|
|
| [[20]] |
宋彦, 汪小中, 赵磊, 等. 基于近红外光谱技术的眉茶拼配比例预测方法[J]. 农业工程学报, 2022, 38(2): 307-315.
SONG Y, WANG X Z, ZHAO L, et al. Predicting the blending ratio of Mee Tea based on near infrared spectroscopy[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(2): 307-315.
|
|
|
| [[21]] |
闫政旭, 秦超, 宋刚. 基于Pearson特征选择的随机森林模型股票价格预测[J]. 计算机工程与应用, 2021, 57(15): 286-296.
YAN Z X, QIN C, SONG G. Random forest model stock price prediction based on Pearson feature selection[J]. Computer Engineering and Applications, 2021, 57(15): 286-296.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|