|
|
| [[1]] |
杨晓明. 采煤工作面端头三角区岩层弱化技术研究[J]. 矿业装备, 2024(2): 41-43.
YANG X M. Study on strata weakening technology in triangle area at the end of coal mining face[J]. Mining Equipment, 2024(2): 41-43.
|
|
|
| [[2]] |
郭海军, 冯志忠, 徐朝, 等. 大采高三角区坚硬顶板治理技术研究[J]. 中国煤炭, 2023, 49(S2): 272-276.
GUO H J, FENG Z Z, XU C, et al. Study on treatment technology of hard roof in triangle area with large mining height[J]. China Coal, 2023, 49(S2): 272-276.
|
|
|
| [[3]] |
崔计平. 矿用水切割机在煤矿退锚中的应用[J]. 机械管理开发, 2021, 36(7): 139-140.
CUI J P. Application of mine water cutting machine in coal mine anchoring[J]. Mechanical Management and Development, 2021, 36(7): 139-140.
|
|
|
| [[4]] |
伊永杰. 退锚装置在保德煤矿的应用[J]. 中国高新技术企业, 2016(26): 144-145.
YI Y J. Application of anchor withdrawing device in Baode coal mine[J]. China High-Tech Enterprises, 2016(26): 144-145.
|
|
|
| [[5]] |
赵垚庭, 张博, 李晋. 水力切割技术在退锚工序中的应用[J]. 山东煤炭科技, 2022, 40(7): 92-93, 99.
ZHAO Y T, ZHANG B, LI J. Application of hydraulic cutting technology in anchor withdrawal process[J]. Shandong Coal Science and Technology, 2022, 40(7): 92-93, 99.
|
|
|
| [[6]] |
管守军, 刘晟, 张凯辉. 麻家梁矿锚索破断机理研究及退锚创新应用[J]. 同煤科技, 2019(2): 37-40.
GUAN S J, LIU S, ZHANG K H. Study on breaking mechanism of anchor cable and innovative application of anchor removal in Majialiang Mine[J]. Science and Technology of Datong Coal Mining Administration, 2019(2): 37-40.
|
|
|
| [[7]] |
张德生, 任怀伟, 卞冀, 等. 综采工作面超前巷道自动化辅助作业技术现状与展望[J]. 矿山机械, 2020, 48(5): 1-6.
ZHANG D S, REN H W, BIAN J, et al. Present situation and prospect of automatic auxiliary operation technology used in advanced roadway of fully-mechanized mining face[J]. Mining & Processing Equipment, 2020, 48(5): 1-6.
|
|
|
| [[8]] |
张安宁, 叶国徽, 刘凯, 等. 锚杆退锚机锈死螺母破切器破切力分析[J]. 煤矿机械, 2012, 33(1): 101-102.
ZHANG A N, YE G H, LIU K, et al. Mechanical analysis for nut-breaking cutter of bolt unloader[J]. Coal Mine Machinery, 2012, 33(1): 101-102.
|
|
|
| [[9]] |
于进, 张东海. 矿用液压退锚车剖切机构优化设计[J]. 科技资讯, 2023, 21(24): 112-115.
YU J, ZHANG D H. Optimization design of the cutting mechanism of hydraulic anchor-unloading cars for mines[J]. Science & Technology Information, 2023, 21(24): 112-115.
|
|
|
| [[10]] |
刘建月, 崔小朝, 刘伟婧. Al2O3陶瓷环在锚具退锚中的应用研究[J]. 太原科技大学学报, 2015, 36(1): 68-71.
LIU J Y, CUI X C, LIU W J. Research on application of Al2O3 ceramic ring in anchorage system unload[J]. Journal of Taiyuan University of Science and Technology, 2015, 36(1): 68-71.
|
|
|
| [[11]] |
王晨灿, 李明. 基于YOLOv8的火灾烟雾检测算法研究[J]. 北京联合大学学报, 2023, 37(5): 69-77.
WANG C C, LI M. Research on fire smoke detection algorithms based on YOLOv8[J]. Journal of Beijing Union University, 2023, 37(5): 69-77.
|
|
|
| [[12]] |
WANG H Q, WANG B N, GE C. Reparameterized YOLOv8 pavement disease detection algorithm [J]. Computer Engineering and Applications, 2024, 60(5): 191-199.
|
|
|
| [[13]] |
王安静, 袁巨龙, 朱勇建, 等. 基于改进YOLOv8s的鼓形滚子表面缺陷检测算法[J]. 浙江大学学报(工学版), 2024, 58(2): 370-380, 387.
WANG A J, YUAN J L, ZHU Y J, et al. Drum roller surface defect detection algorithm based on improved YOLOv8s[J]. Journal of Zhejiang University (Engineering Science), 2024, 58(2): 370-380, 387.
|
|
|
| [[14]] |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE Computer Society, 2016: 779-788.
|
|
|
| [[15]] |
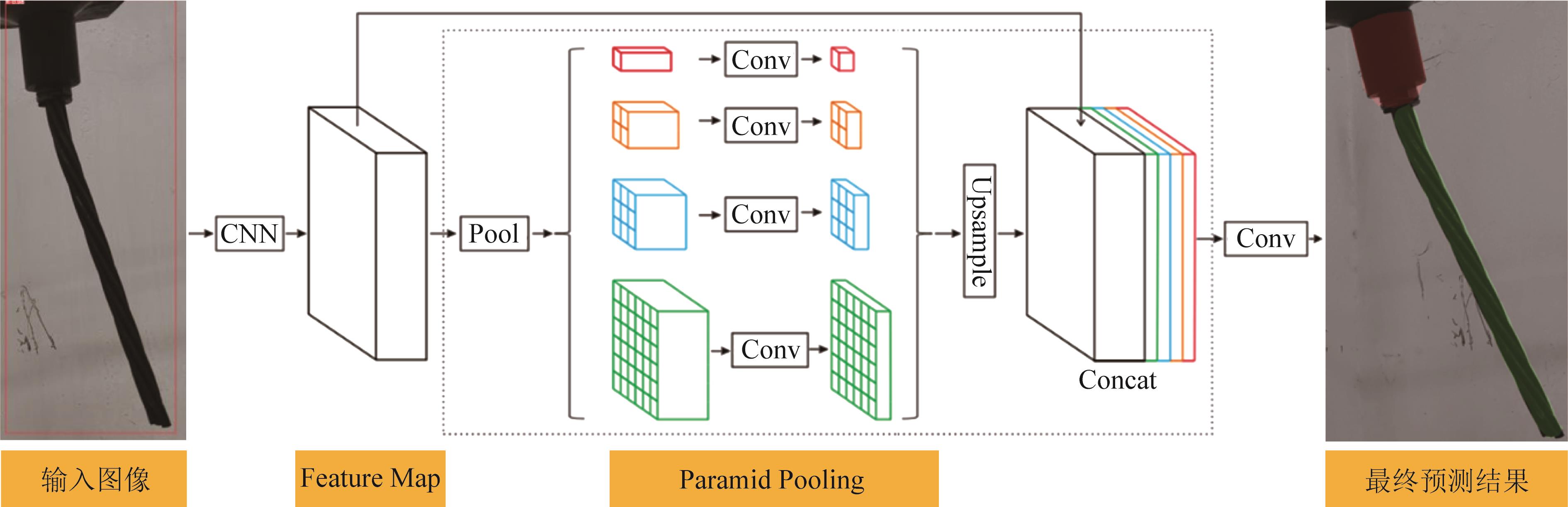
ZHAO H S, SHI J P, QI X J, et al. Pyramid scene parsing network[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas: IEEE Computer Society, 2017: 2881-2890.
|
|
|
| [[16]] |
FENG X M, WANG T P, YANG X H, et al. ConvWin-UNet: UNet-like hierarchical vision Transformer combined with convolution for medical image segmentation[J]. Mathematical Biosciences and Engineering, 2022, 20(1): 128-144.
|
|
|
| [[17]] |
董钊辰, 李涛, 刘忻. 大语言模型在低对比度图像识别中的应用与探索[J]. 软件, 2025, 46(9): 23-28, 36.
DONG Z C, LI T, LIU X. Application and exploration of large language model in low contrast image recognition[J]. Computer Engineering & Software, 2025, 46(9): 23-28, 36.
|
|
|
| [[18]] |
熊彬, 张双德. 基于改进PSPNet的卫星遥感图像建筑物语义分割算法[J]. 遥感信息, 2023, 38(4): 73-79.
XIONG B, ZHANG S D. Semantic segmentation algorithm for buildings in satellite remote sensing images based on improved PSPNet[J]. Remote Sensing Information, 2023, 38(4): 73-79.
|
|
|
| [[19]] |
郭浩然, 郭继昌, 汪昱东. 面向水下场景的轻量级图像语义分割网络[J]. 浙江大学学报(工学版), 2023, 57(7): 1278-1286, 1296.
GUO H R, GUO J C, WANG Y D. Lightweight semantic segmentation network for underwater image[J]. Journal of Zhejiang University (Engineering Science), 2023, 57(7): 1278-1286, 1296.
|
|
|
| [[20]] |
周中, 张俊杰, 龚琛杰, 等. 基于深度语义分割的隧道渗漏水智能识别[J]. 岩石力学与工程学报, 2022, 41(10): 2082-2093.
ZHOU Z, ZHANG J J, GONG C J, et al. Automatic identification of tunnel leakage based on deep semantic segmentation[J]. Chinese Journal of Rock Mechanics and Engineering, 2022, 41(10): 2082-2093.
|
|
|