| Robotic and Mechanism Design |
|


|
|
|
| Design and performance analysis of bistable structure-based frog-inspired swimming robot |
Jiming CHEN( ),Haoxin XIONG,Yuanfan CHENG,Kun CHEN,Junfeng HU() ),Haoxin XIONG,Yuanfan CHENG,Kun CHEN,Junfeng HU() |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
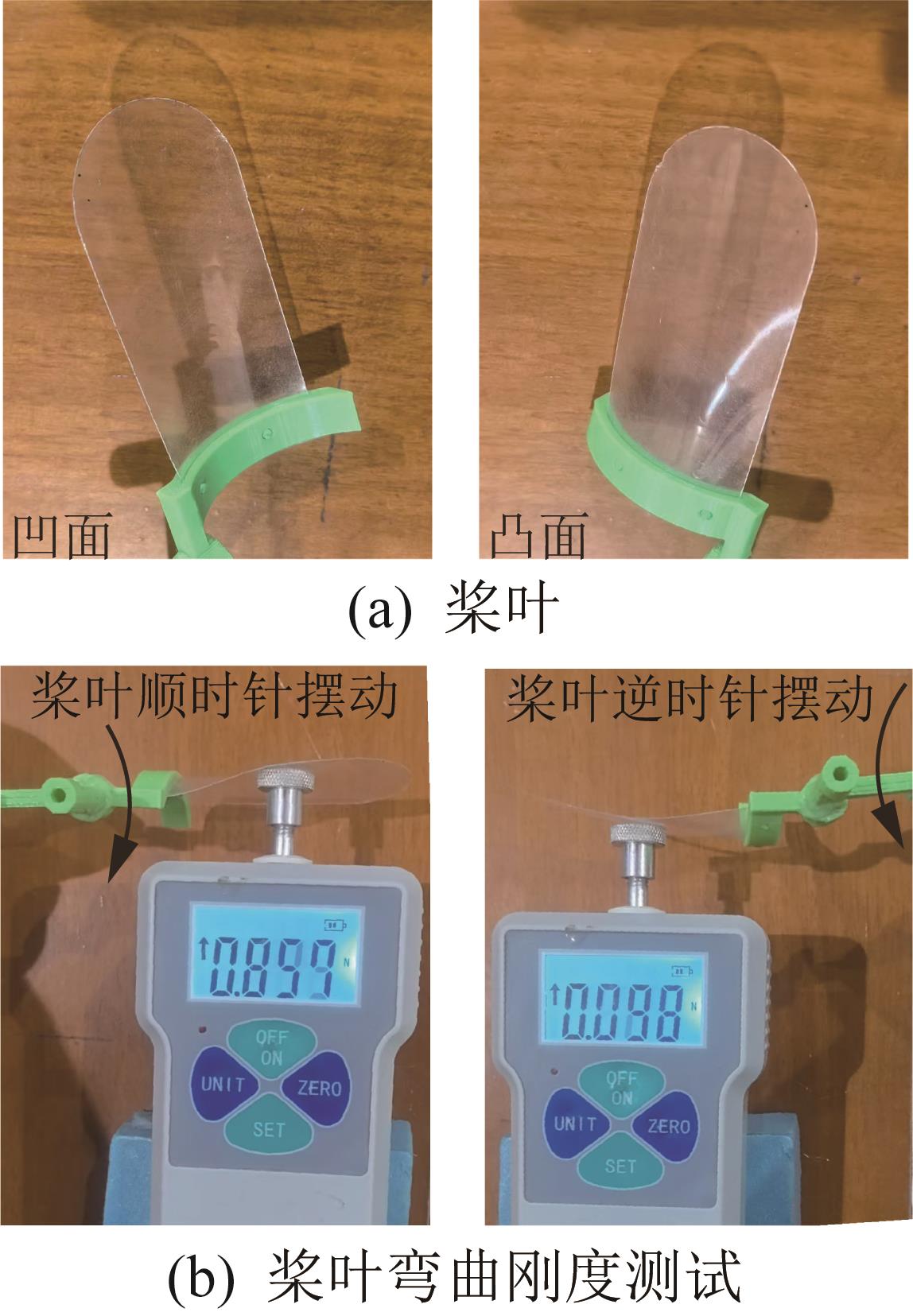
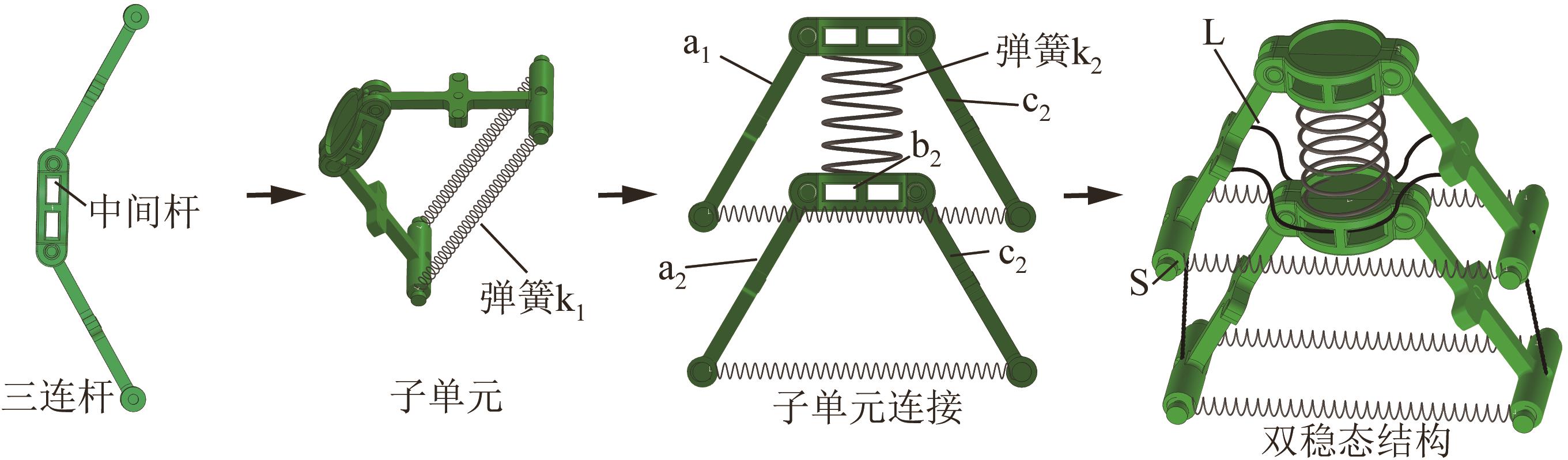
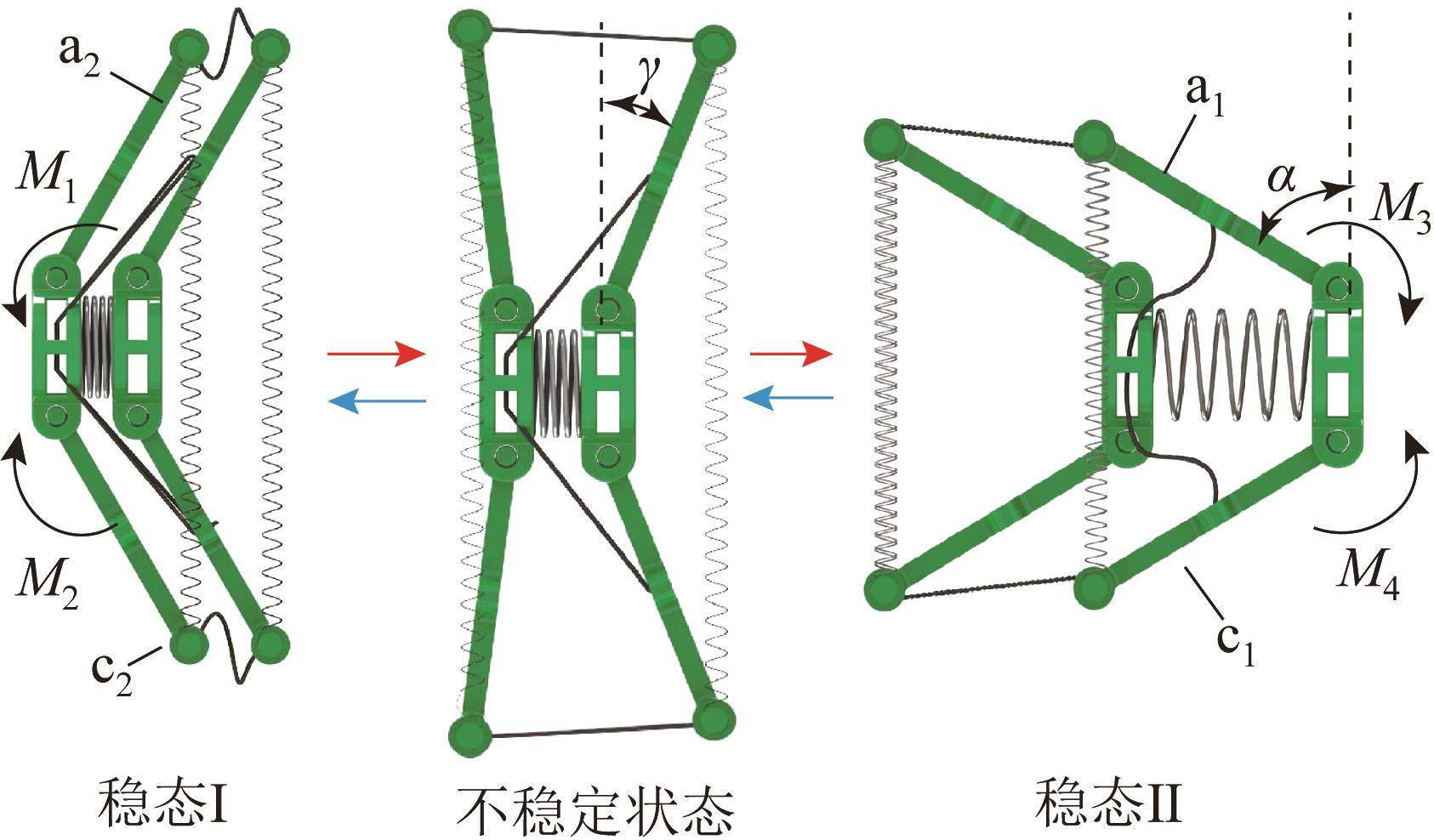
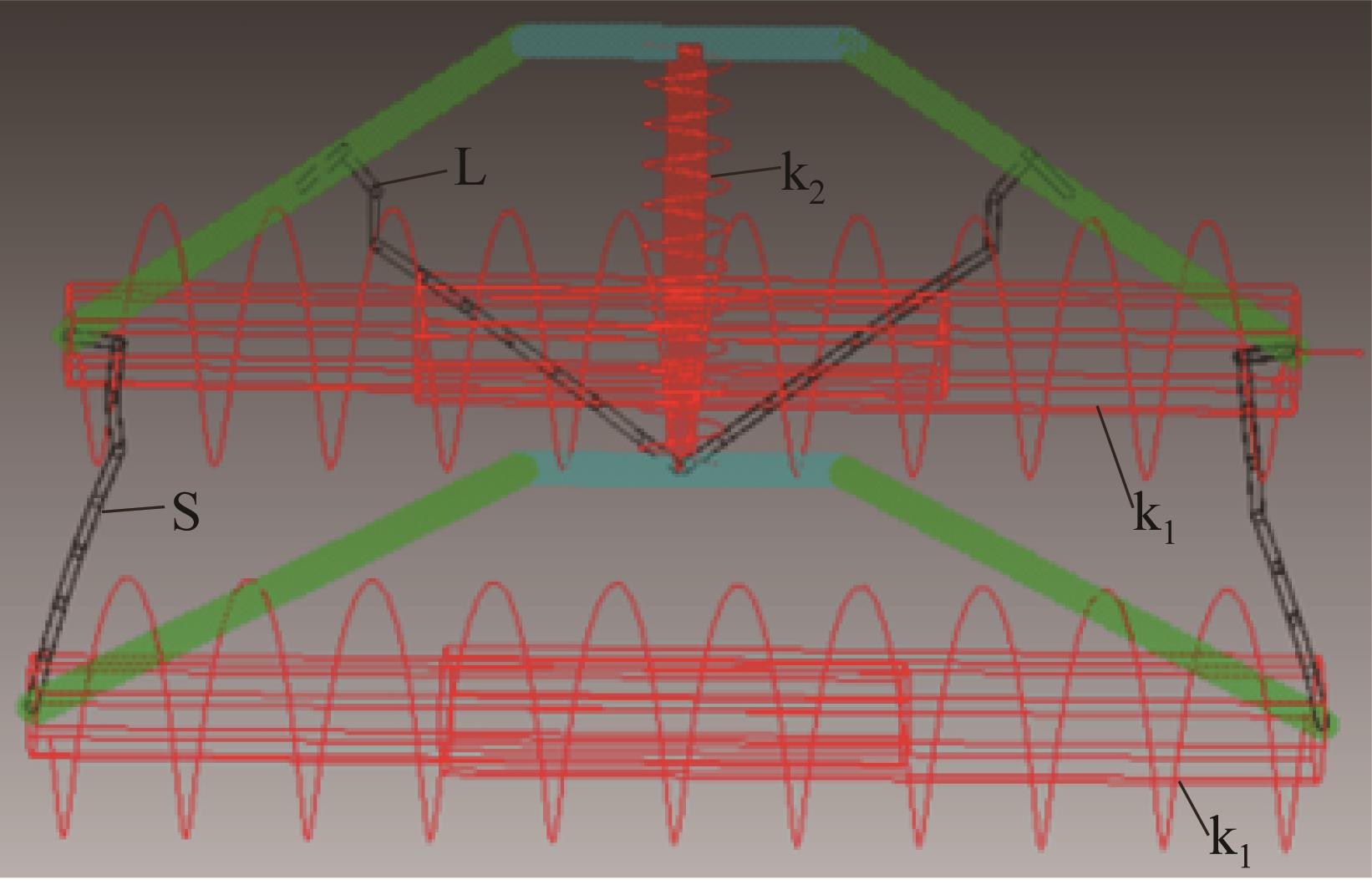
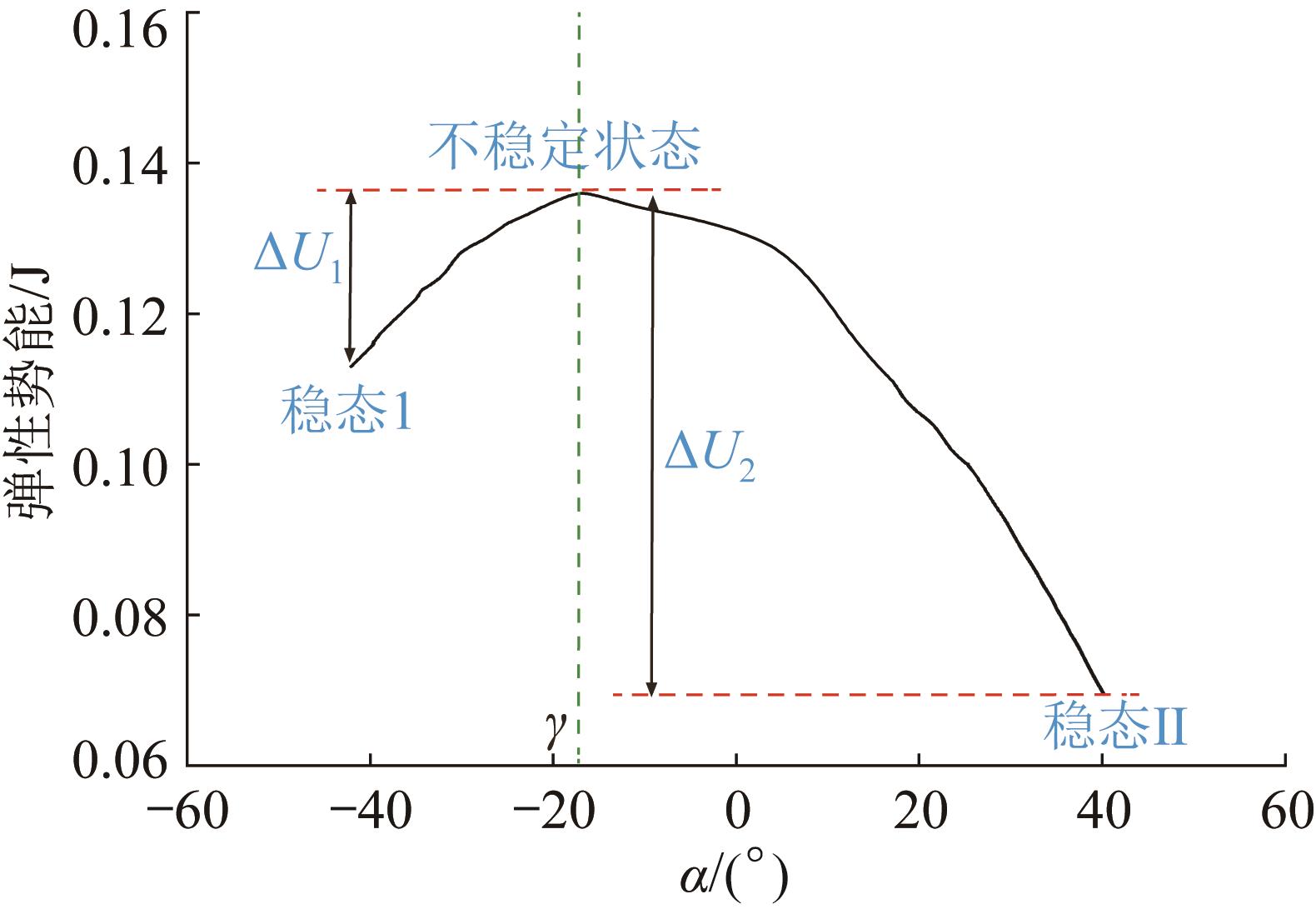
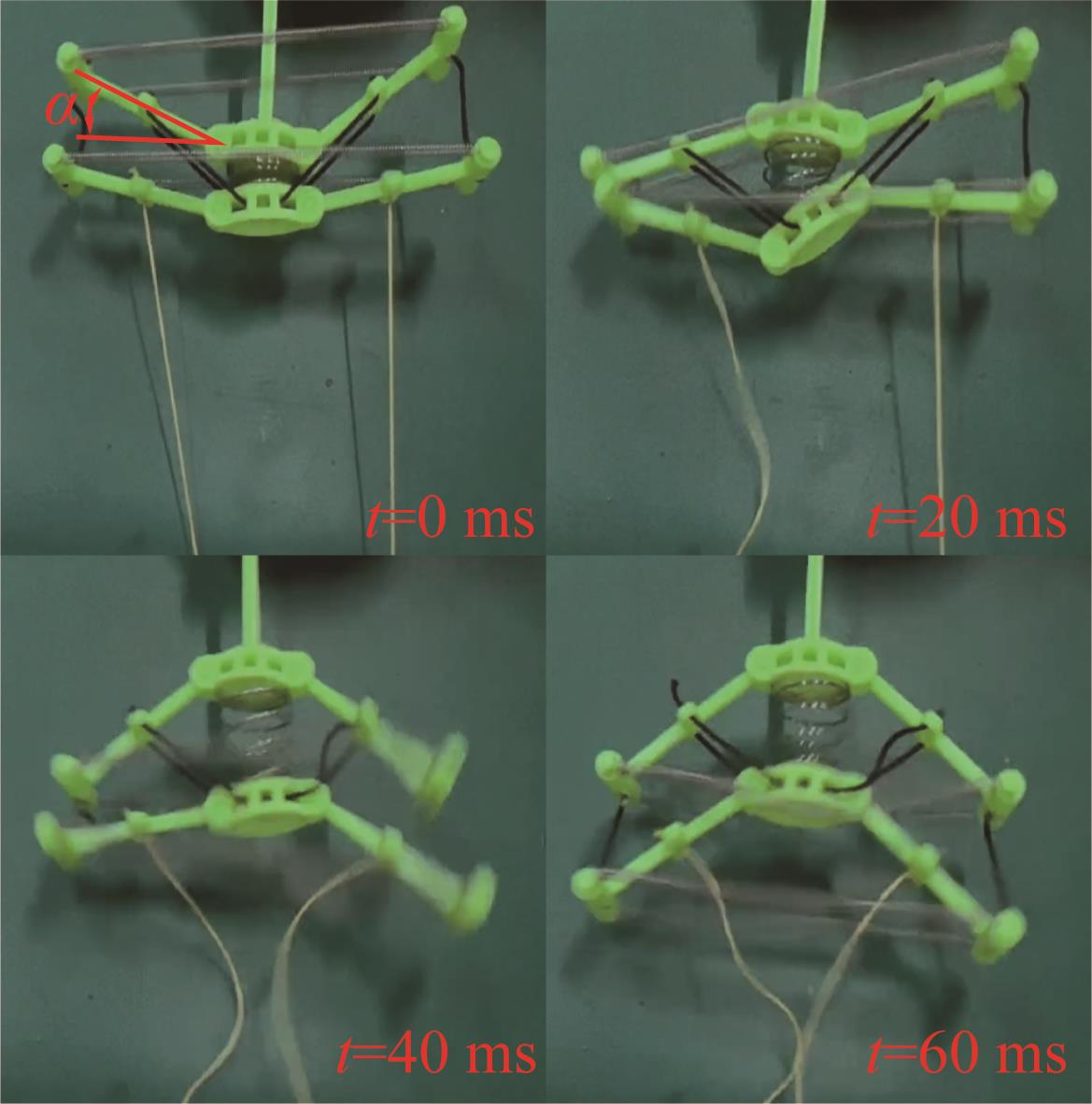
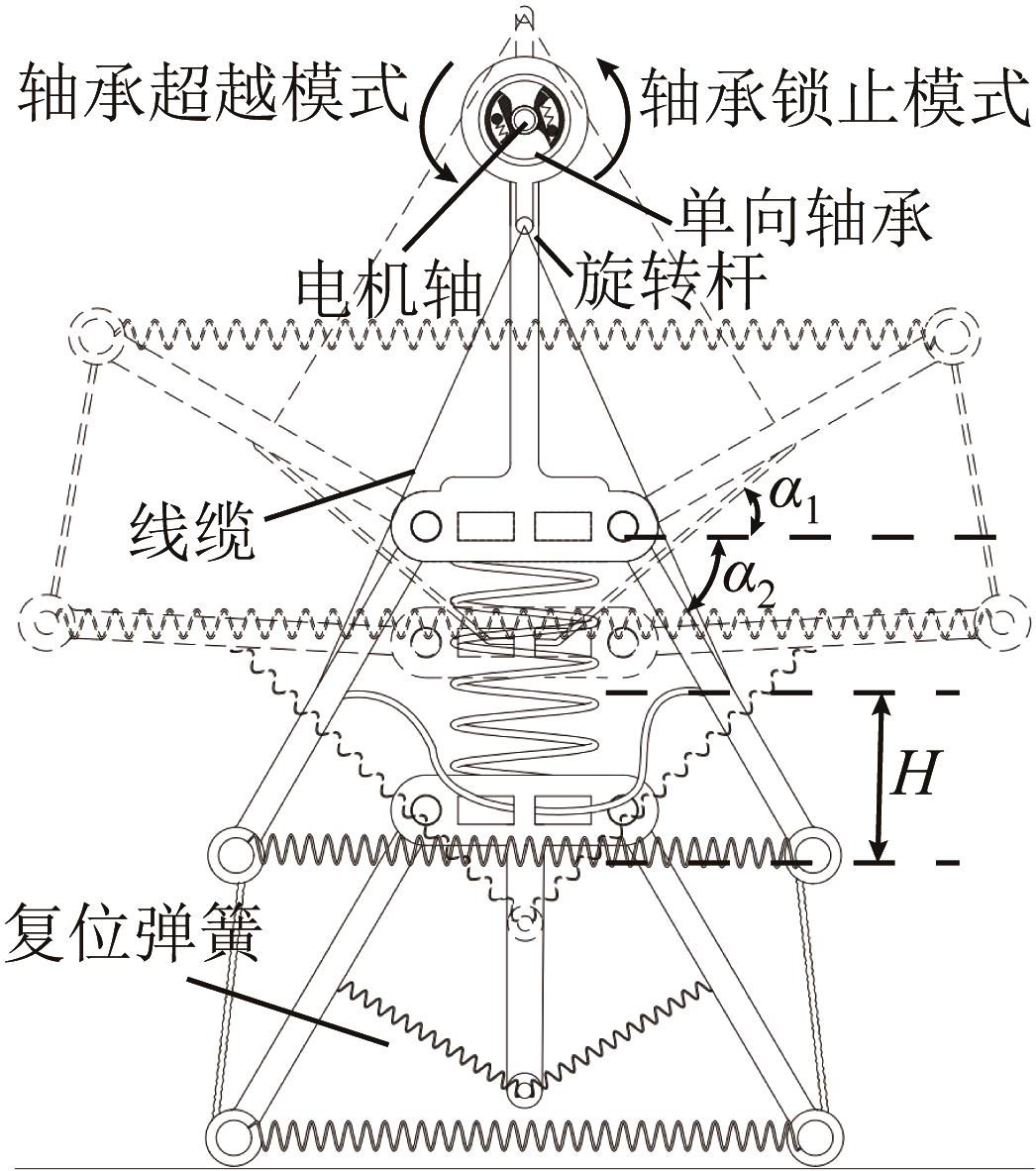
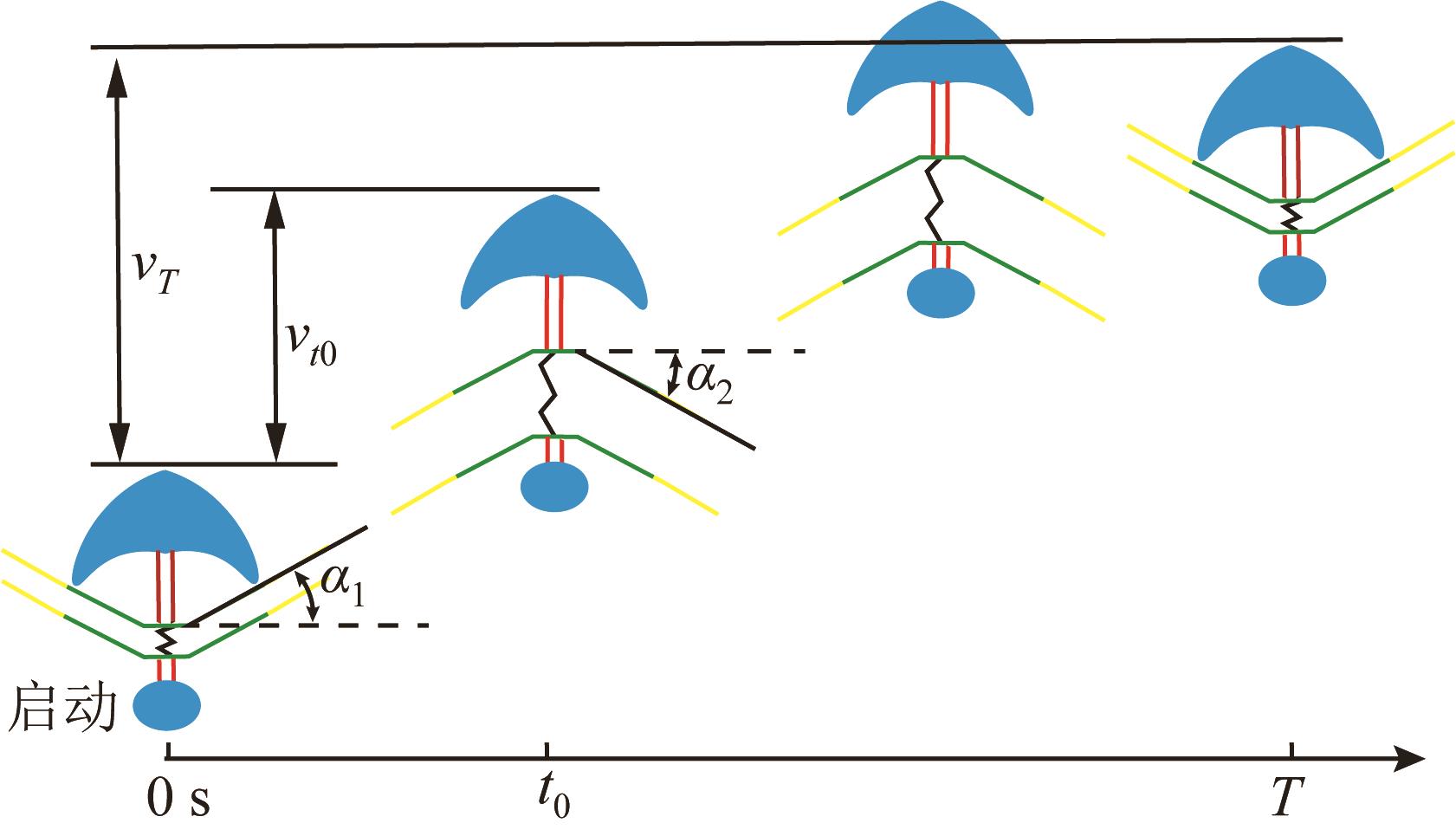
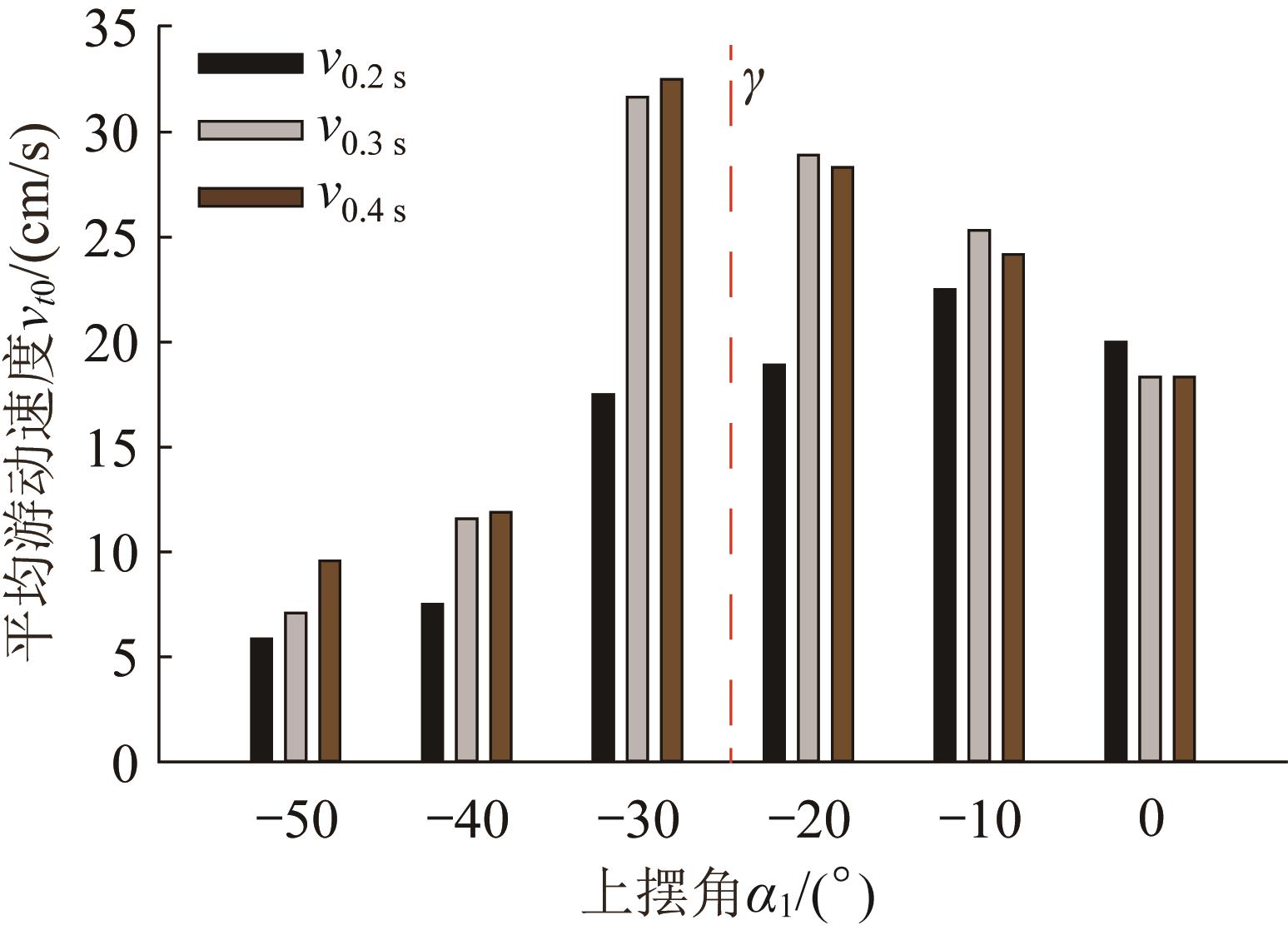
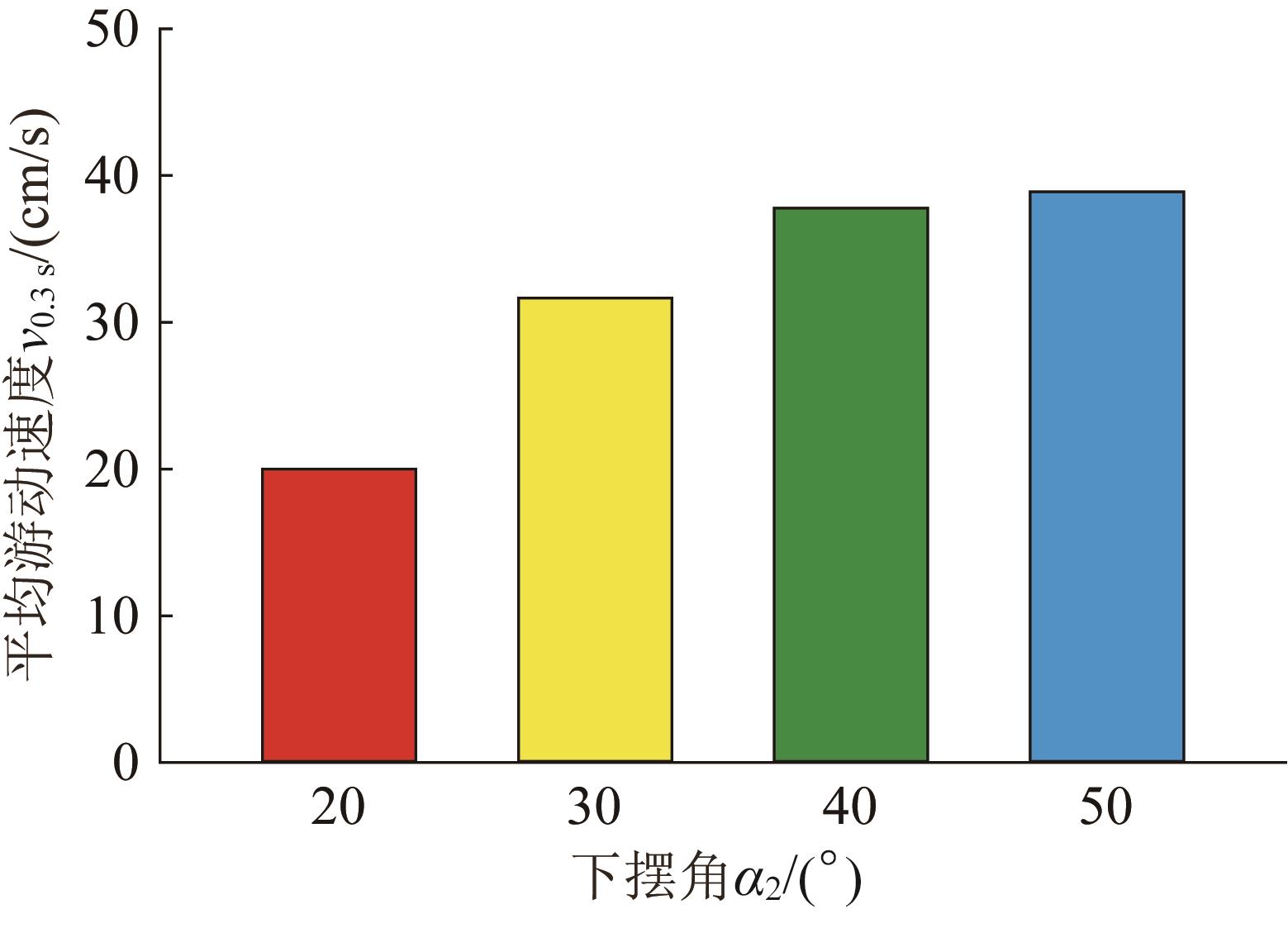
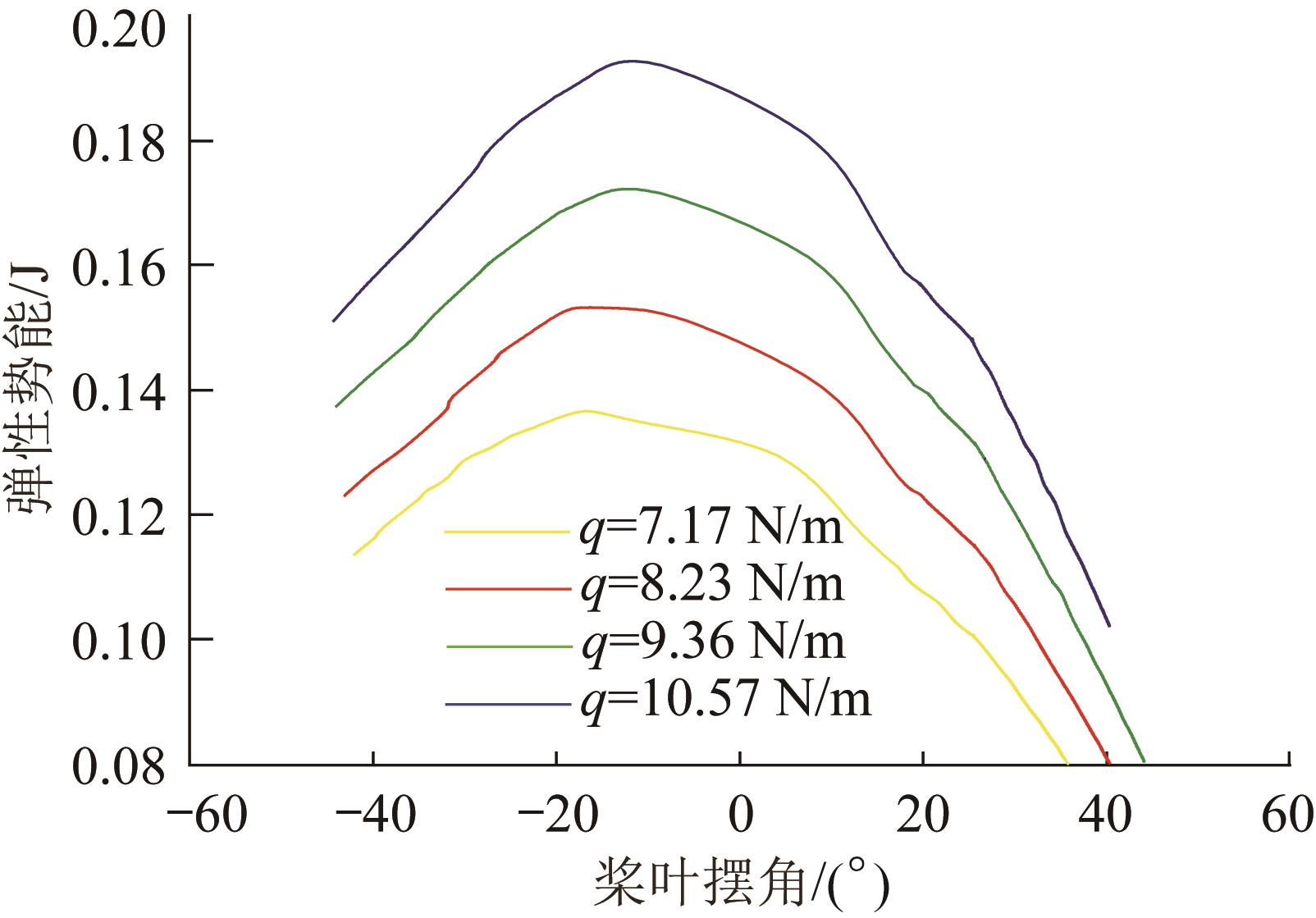
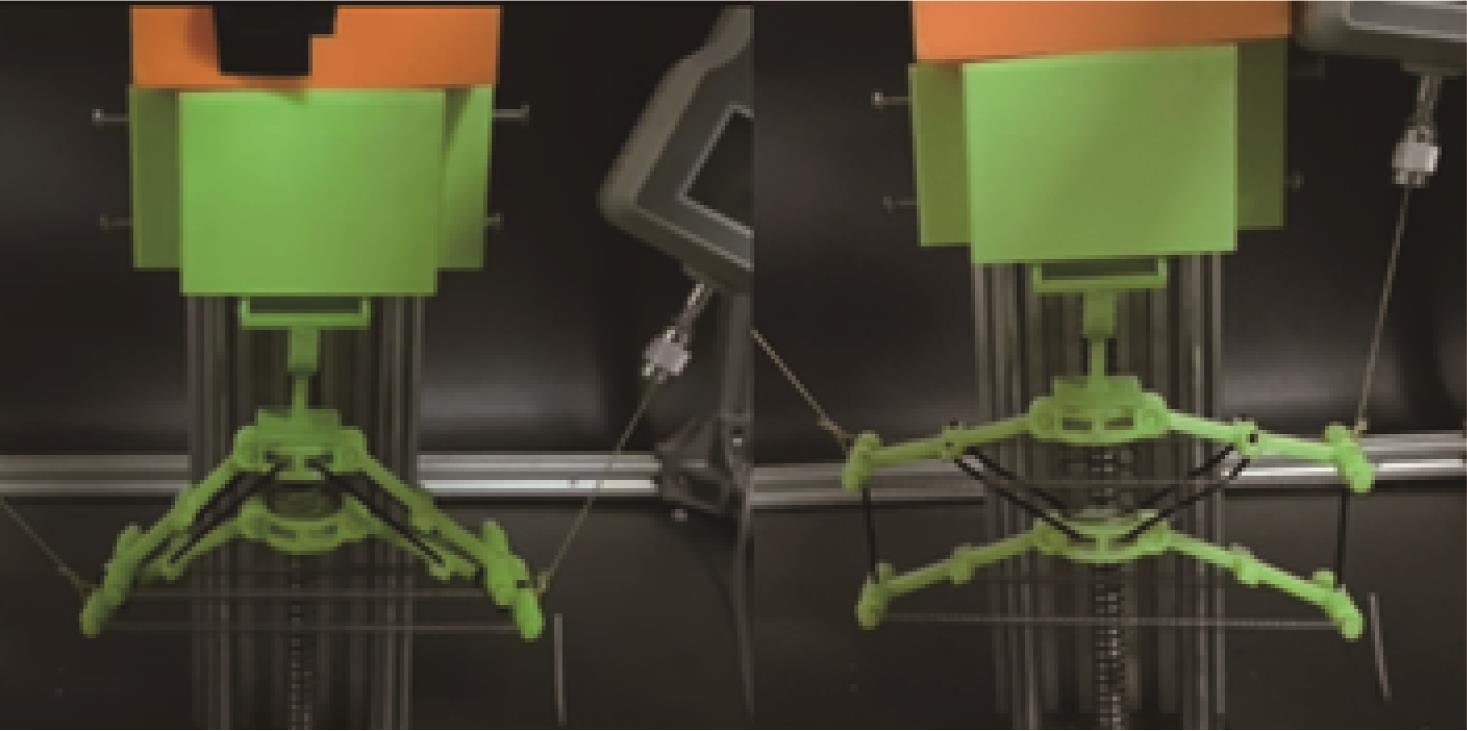
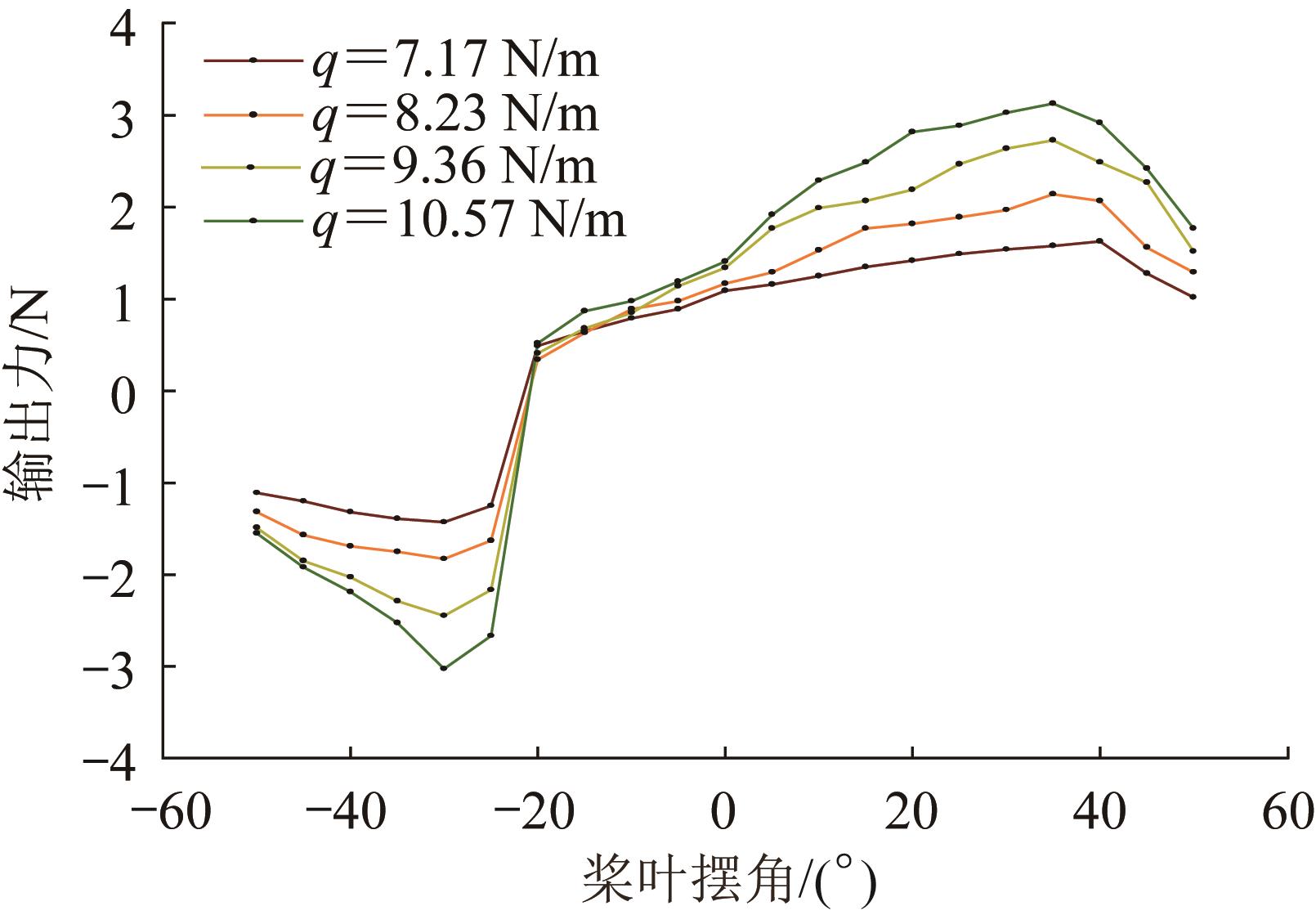
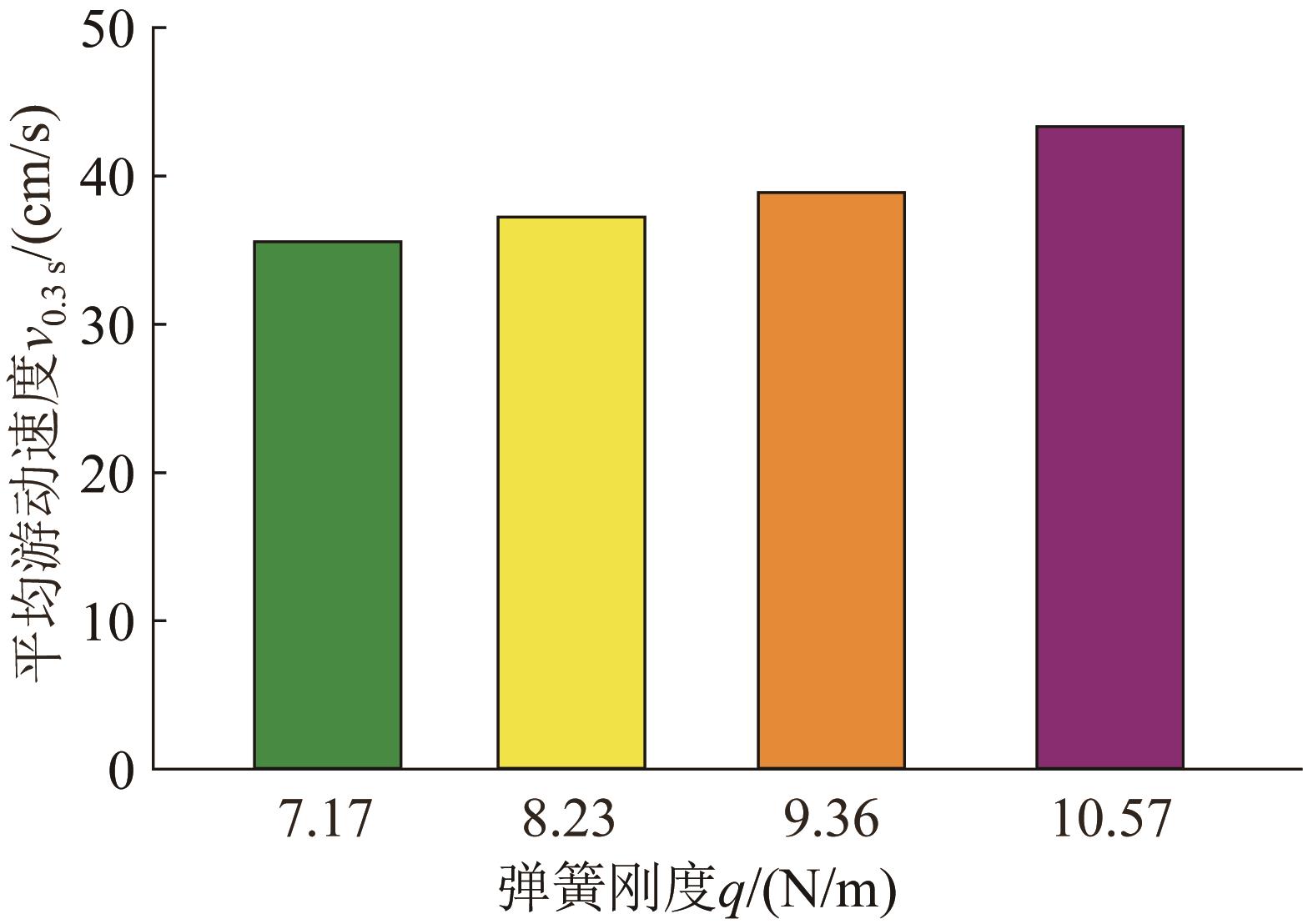
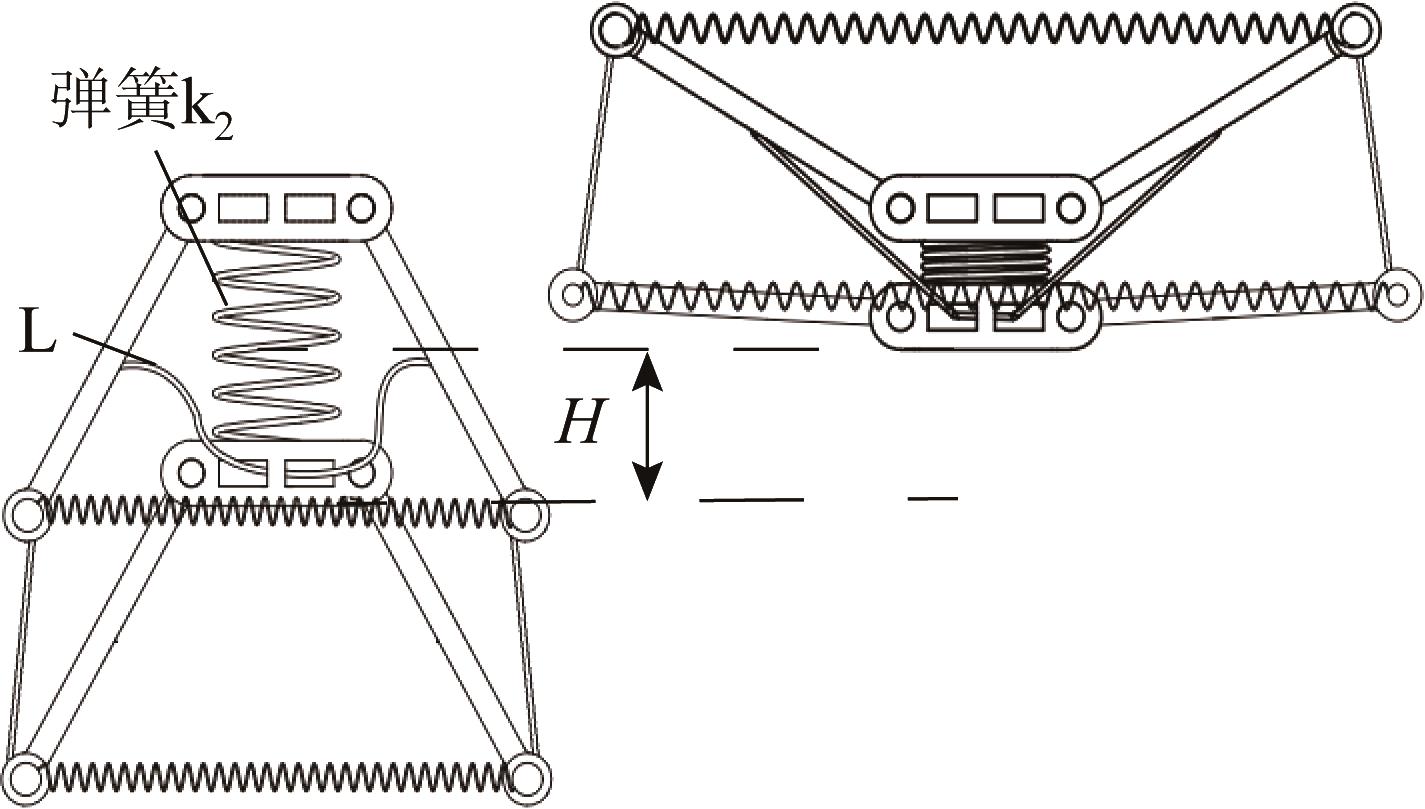
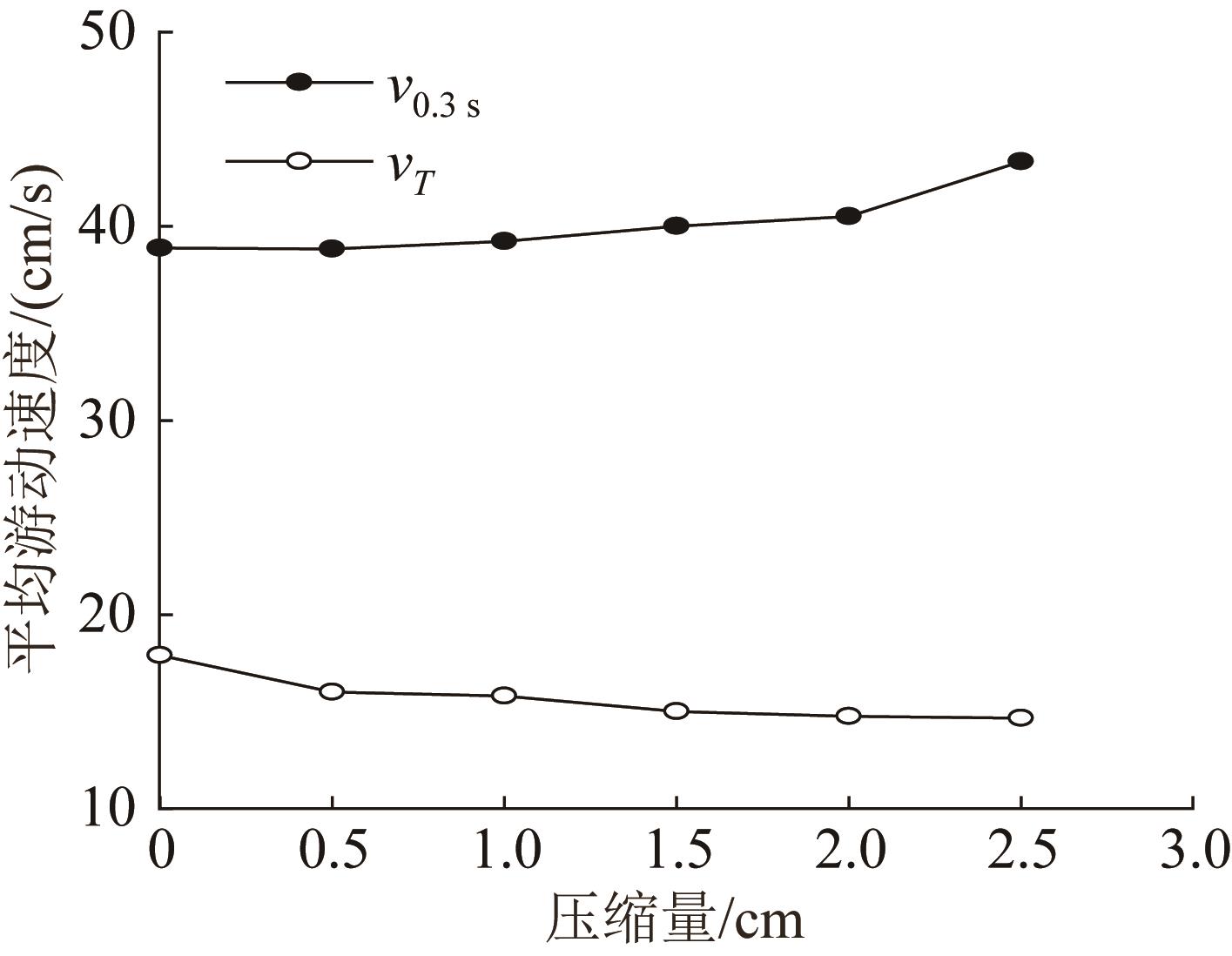
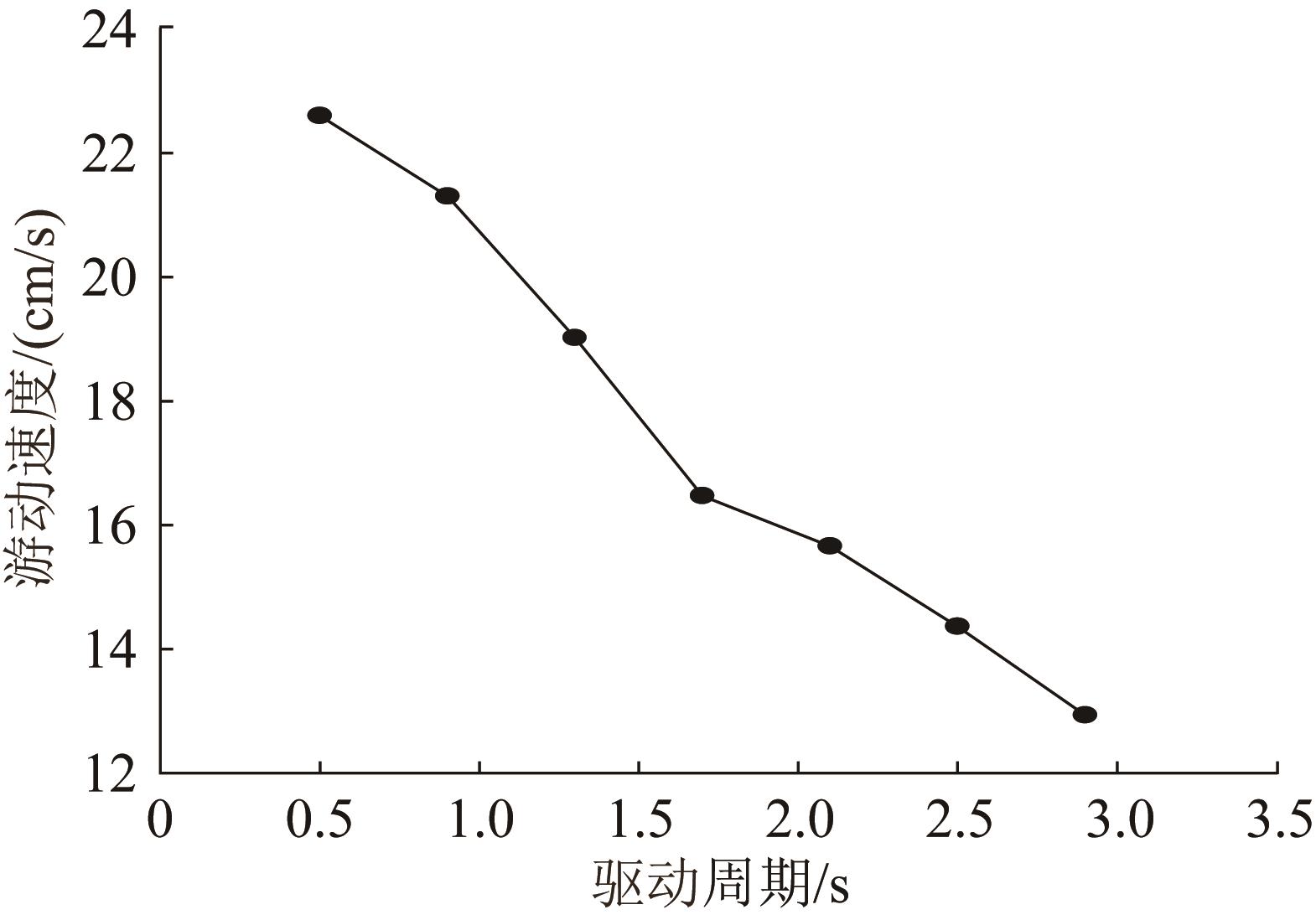
Abstract In response to the requirements of biomimetic swimming propulsion technology, a frog-inspired swimming robot based on a bistable structure is designed. By constructing a linkage-spring-cable composite mechanism, a bistable actuator with rapid energy transition characteristics was proposed. The device utilized an elastic deformation energy storage mechanism of springs to achieve millisecond-level switching between stable states under periodic torque input, generating efficient propulsion through hydrodynamic reaction forces via paddle blades. Subsequently, through ADAMS dynamics simulations and prototype experiments, the influence laws of key parameters such as the paddle blade swing angle amplitude, the spring stiffness, and the spring compression on the response ability and motion performance of the robot were analyzed. Results showed that increasing the stiffness of the main spring k? could enhance the robot's energy storage and release capabilities, and enhance the swing output force, enabling the robot to achieve an average propulsion speed of 43.33 cm/s (1.73 body lengths per second) within 0.3 s after activation. Increasing the compression of the spring k2 could improve propulsion force, with experiments recording a maximum instantaneous propulsion force of 2.14 N (2.58 times body weight). Tests demonstrated that when the actuation cycle of the bistable actuator was 0.5 s, the robot achieved a stable swimming speed of 22.5 cm/s. The designed bistable actuator provides a new paradigm for high-power-density actuation in biomimetic underwater robots, enhancing the application potential of robots in disaster rescue and ecological monitoring fields.
|
|
Received: 03 June 2025
Published: 01 March 2026
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 2538065998@qq.com;hjfsuper@126.com
|
基于双稳态结构的仿青蛙游动机器人设计与性能分析
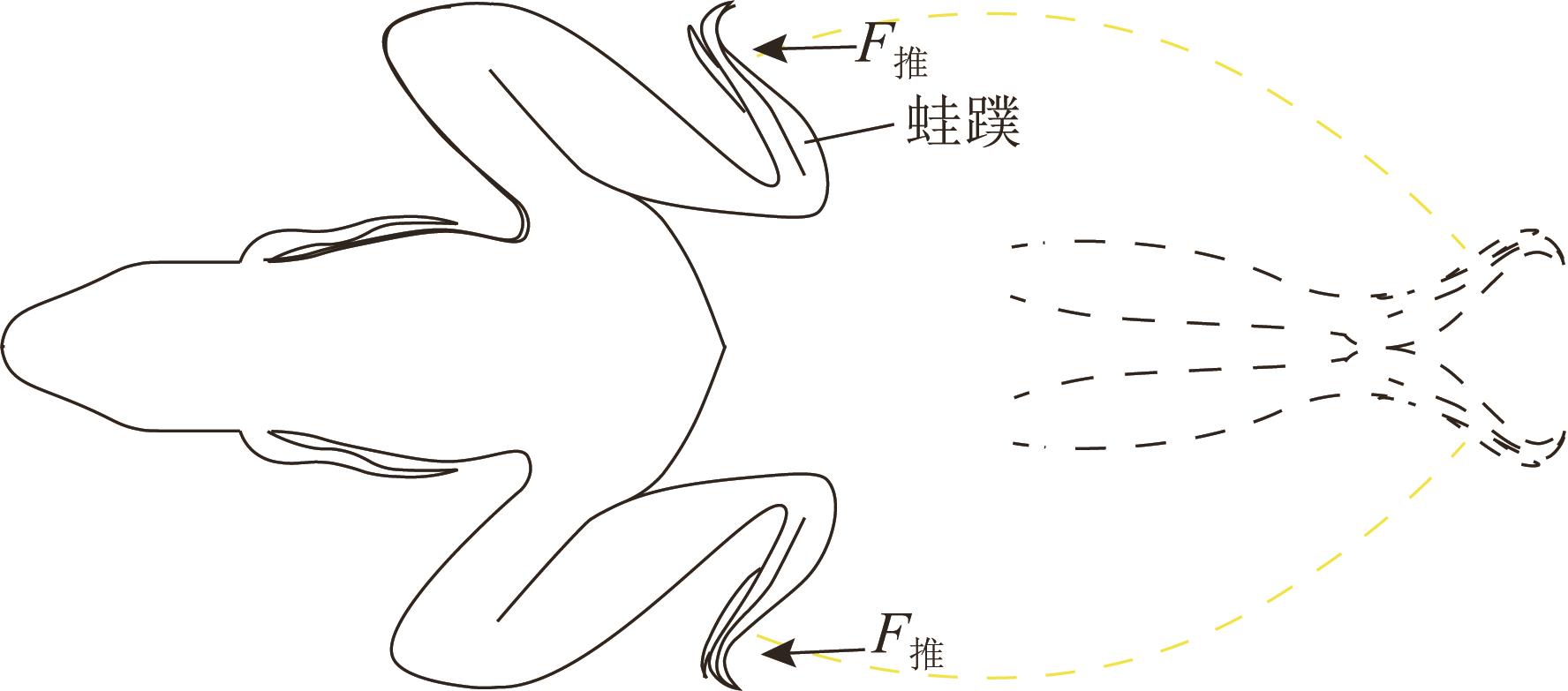
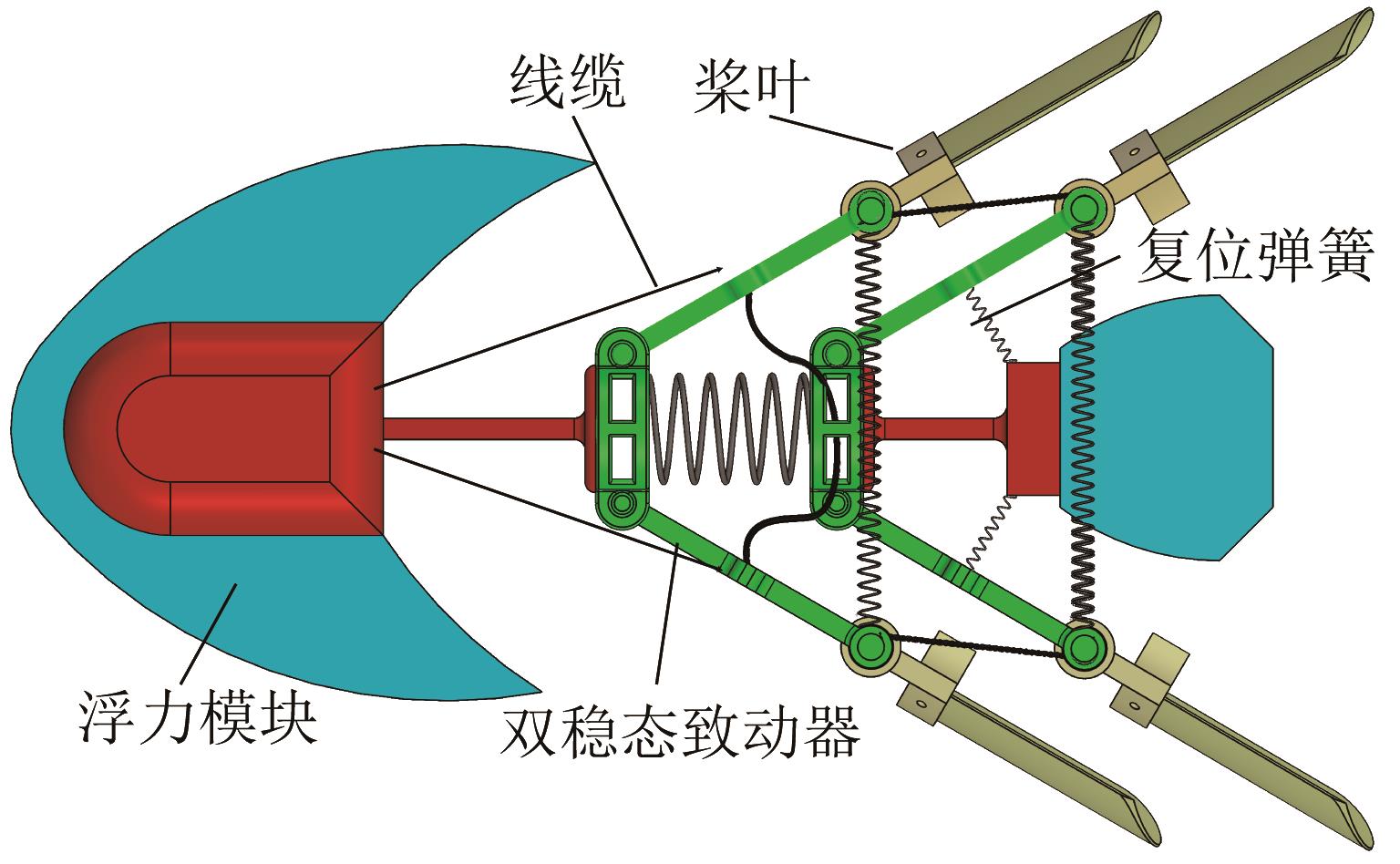
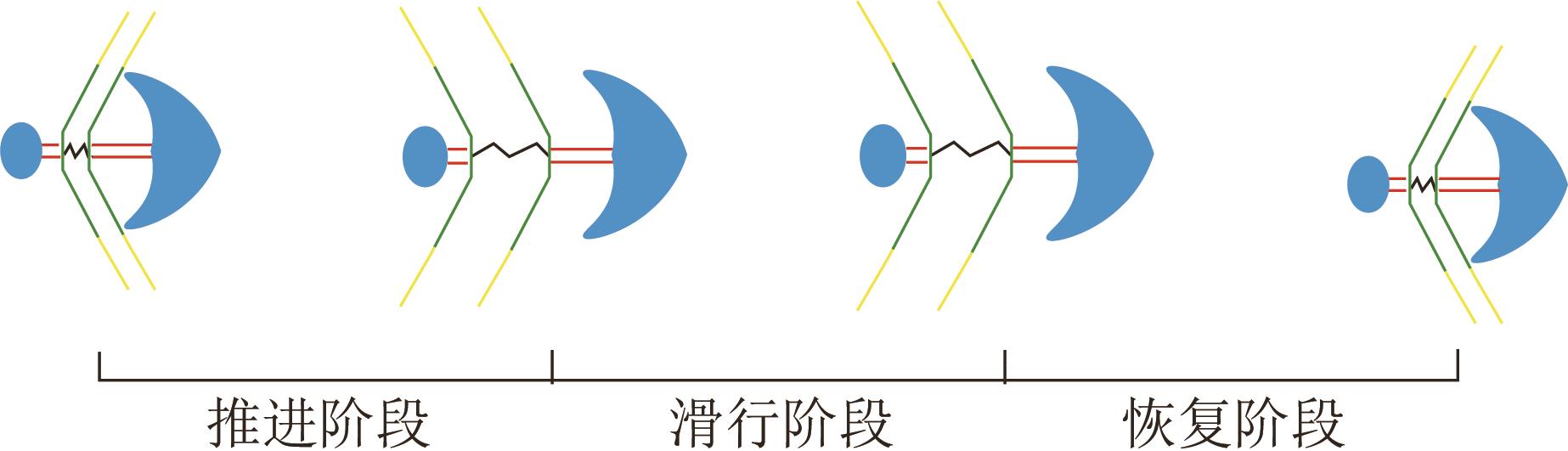
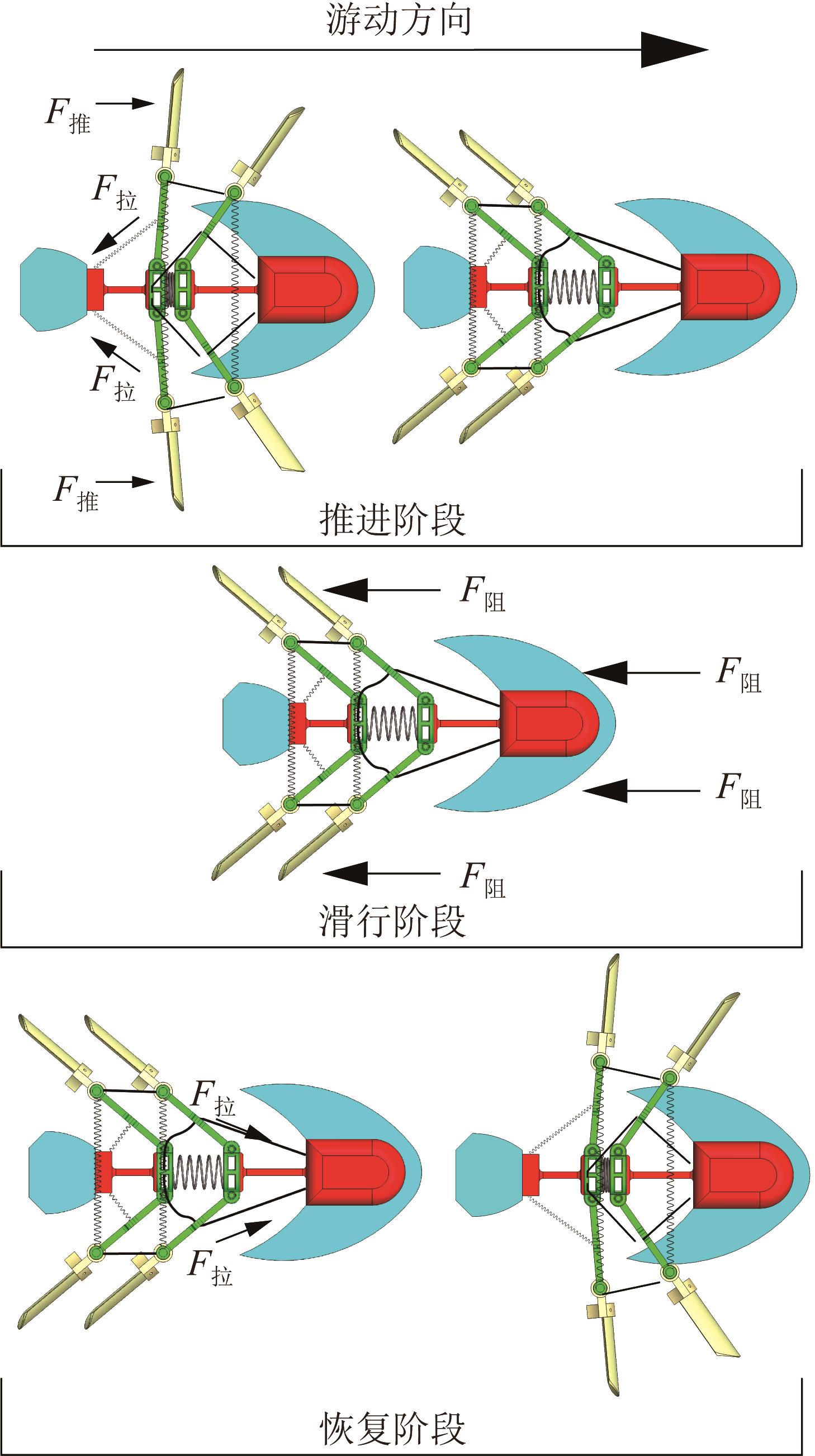
面向仿生游动推进技术需求,设计了一款基于双稳态结构的仿青蛙游动机器人。通过构建连杆-弹簧-线缆复合机构,提出了一种具有快速能量跃迁特性的双稳态致动器。该装置利用弹簧的弹性形变储能机制,在周期性力矩输入下实现稳态间的毫秒级切换,通过桨叶借助水动力反作用力形成高效推进效应。随后,通过ADAMS动力学仿真与样机实验,分析了桨叶摆角幅值、弹簧刚度、弹簧压缩量等关键参数对机器人响应能力和运动性能的影响规律。其中,提高主弹簧k?的刚度可提高双稳态致动器的储能与释能能力,并增强摆动输出力,促使机器人在静止启动后0.3 s内的平均推进速度达43.33 cm/s(1.73倍体长每秒);增加弹簧k?的压缩量可提高推进力,通过实验测得机器人的最大瞬时推进力为2.14 N(2.58倍体重)。测试表明,当双稳态致动器的驱动周期为0.5 s时,机器人可实现22.5 cm/s的稳定游动速度。所设计的双稳态致动器为仿生水下机器人提供了高爆发驱动的新范式,提高了机器人在灾难救援、生态监测等领域的应用潜力。
关键词:
仿青蛙游动机器人,
双稳态致动器,
动力学仿真,
游动速度
|
|
| [[1]] |
QU J T, XU Y N, LI Z K, et al. Recent advances on underwater soft robots[J]. Advanced Intelligent Systems, 2024, 6(2): 2300299.
|
|
|
| [[2]] |
苏宗帅. 水陆两栖仿生机器人研究进展及应用[J]. 国防科技, 2019, 40(4): 50-54.
SU Z S. Research developments of amphibious biomimetic robots and applications[J]. National Defense Science & Technology, 2019, 40(4): 50-54.
|
|
|
| [[3]] |
GORDLEEVA S Y, KASTALSKIY I A, TSYBINA Y A, et al. Control of movement of underwater swimmers: animals, simulated animates and swimming robots[J]. Physics of Life Reviews, 2023, 47: 211-244.
|
|
|
| [[4]] |
乔增, 王神龙, 李凯, 等. 气动双稳态装置驱动的仿喷水推进乌贼结构软体机器人[J]. 机器人, 2023, 45(3): 287-301.
QIAO Z, WANG S L, LI K, et al. Water-jet propelled squid-inspired soft robot driven by pneumatic bistable device[J]. Robot, 2023, 45(3): 287-301.
|
|
|
| [[5]] |
HARTMANN F, BASKARAN M, RAYNAUD G, et al. Highly agile flat swimming robot[J]. Science Robotics, 2025, 10(99): eadr0721.
|
|
|
| [[6]] |
CHEN D, WANG B, XIONG Y, et al. Design and analysis of a novel bionic tensegrity robotic fish with a continuum body[J]. Biomimetics, 2024, 9(1): 19.
|
|
|
| [[7]] |
BI S S, NIU C M, CAI Y R, et al. A waypoint-tracking controller for a bionic autonomous underwater vehicle with two pectoral fins[J]. Advanced Robotics, 2014, 28(10): 673-681.
|
|
|
| [[8]] |
GAL J M, BLAKE R W. Biomechanics of frog swimming I: estimation of the propulsive force generated by Hymenochirus boettgeri [J]. Journal of Experimental Biology, 1988, 138(1): 399-411.
|
|
|
| [[9]] |
ILIEVSKI F, MAZZEO A D, SHEPHERD R F, et al. Titelbild: soft robotics for chemists[J]. Angewandte Chemie, 2011, 123(8): 1765.
|
|
|
| [[10]] |
ZHANG Z, NAN R Y, SHEN H C, et al. A high load capacity and efficient-transporting inchworm-like crawling robot with bistable structure and pneumatic networks actuator[J]. Smart Materials and Structures, 2023, 32(12): 125009.
|
|
|
| [[11]] |
李庆中, 李晓丹, 于福杰, 等. 介电弹性体式蛙型仿生软体机器人设计[J]. 兵工学报, 2022, 43(1): 140-147.
LI Q Z, LI X D, YU F J, et al. Dielectric elastomer-driven frog-shaped bionic soft robot[J]. Acta Armamentarii, 2022, 43(1): 140-147.
|
|
|
| [[12]] |
FAN J Z, WANG S Q, YU Q G, et al. Swimming performance of the frog-inspired soft robot[J]. Soft Robotics, 2020, 7(5): 615-626.
|
|
|
| [[13]] |
WANG S L, QIAO Z, LI Z L, et al. Jellyfish-inspired soft robot driven by pneumatic bistable actuators[J]. Soft Robotics, 2025, 12(1): 1-12.
|
|
|
| [[14]] |
OVERVELDE J T B, KLOEK T, D’HAEN J J A, et al. Amplifying the response of soft actuators by harnessing snap-through instabilities[J]. Proceedings of the National Academy of Sciences of the United States of America, 2015, 112(35): 10863-10868.
|
|
|
| [[15]] |
CHI Y D, LI Y B, ZHAO Y, et al. Bistable and multistable actuators for soft robots: structures, materials, and functionalities[J]. Advanced Materials, 2022, 34(19): 2110384.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|