|
|
|
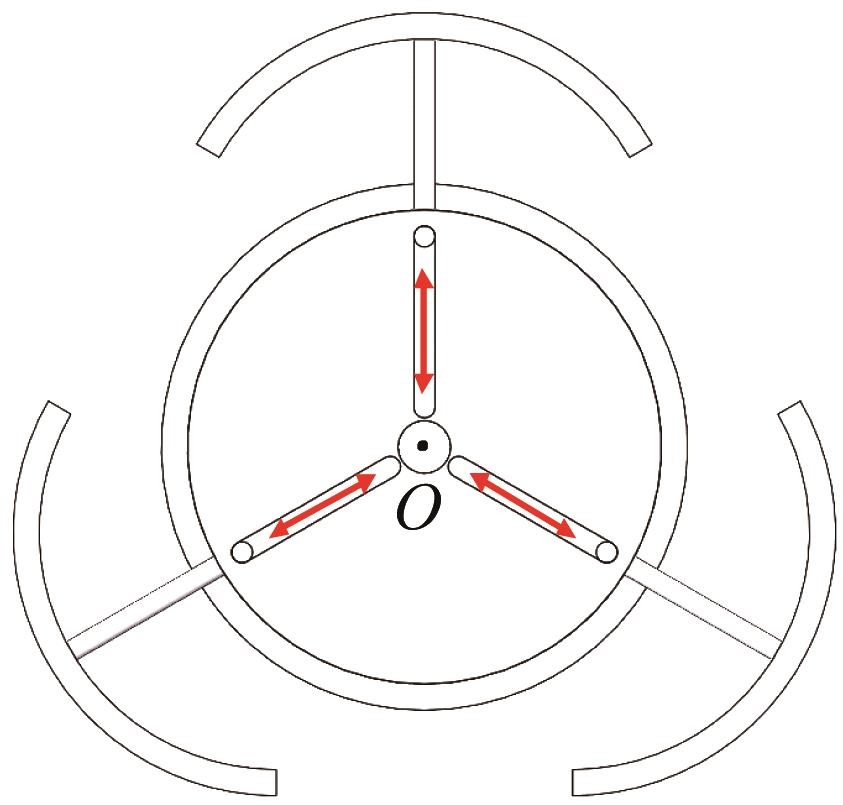
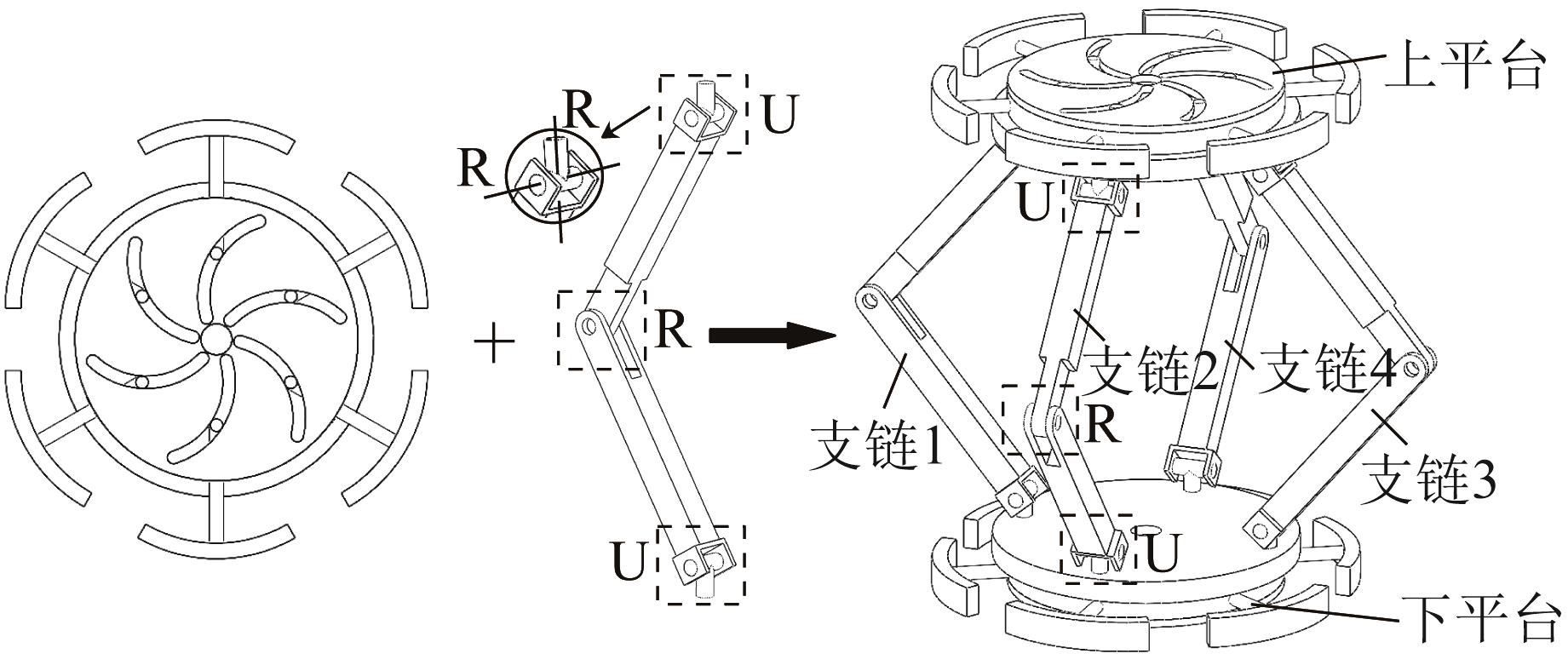
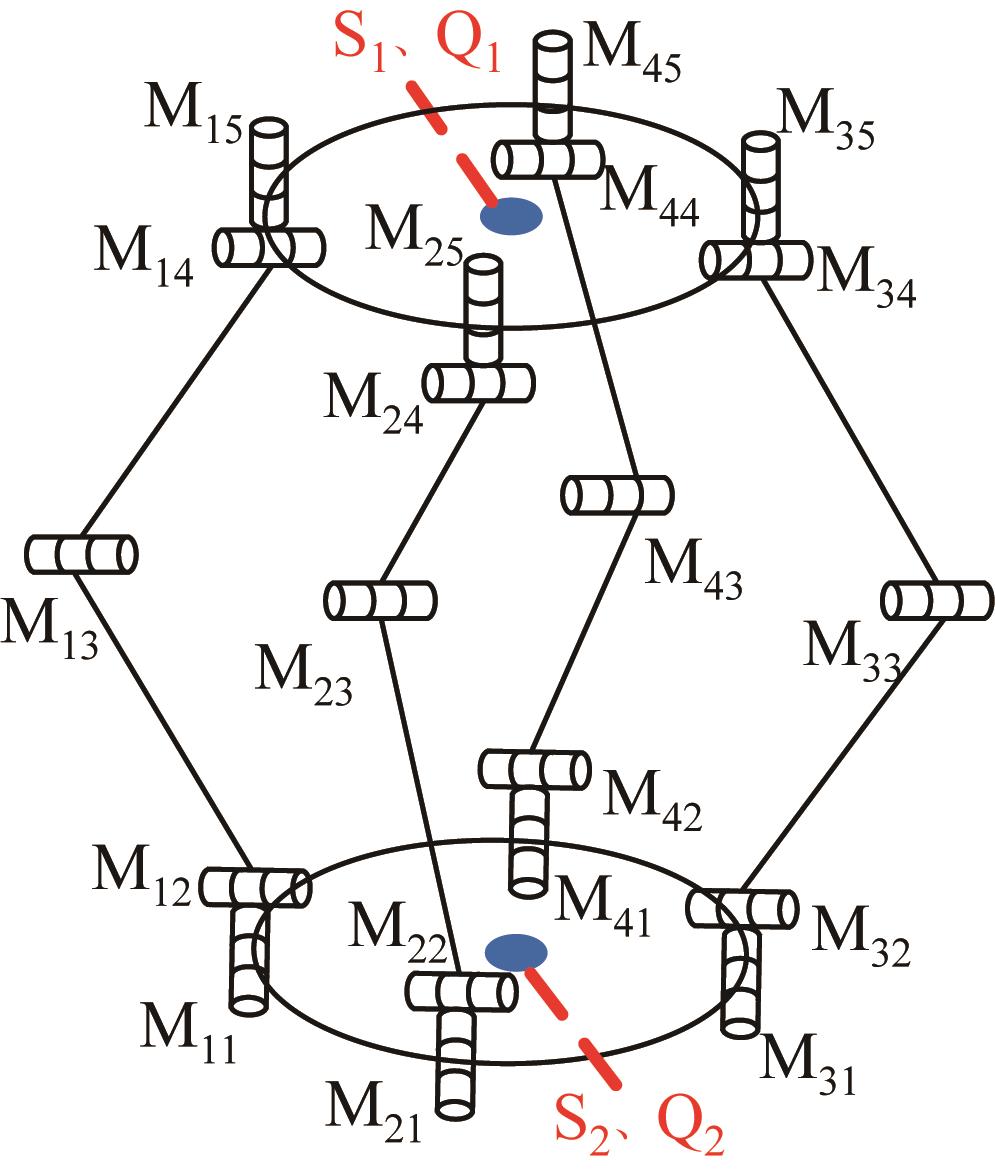
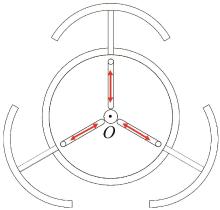
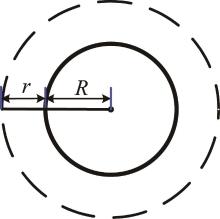
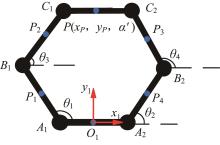
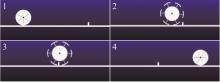
Fig.1 Schematic of variable-diameter platform
|
|
|
|
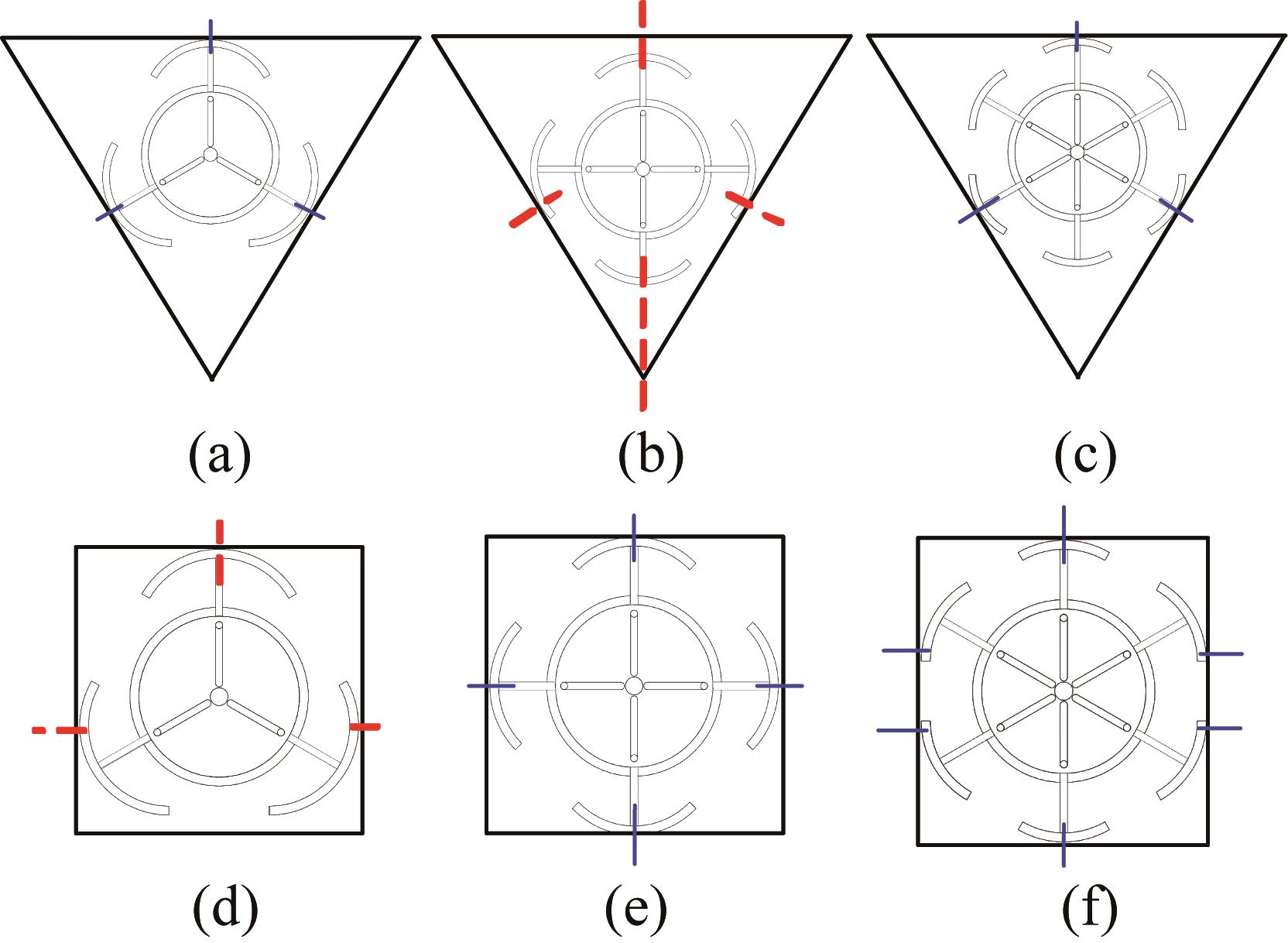
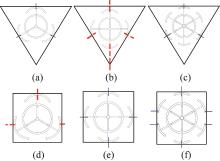
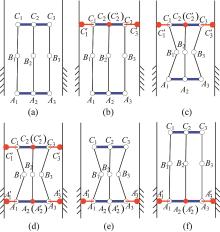
Fig.2 Force conditions of different numbers of telescopic rods in two types of spaces
|
|
|
|
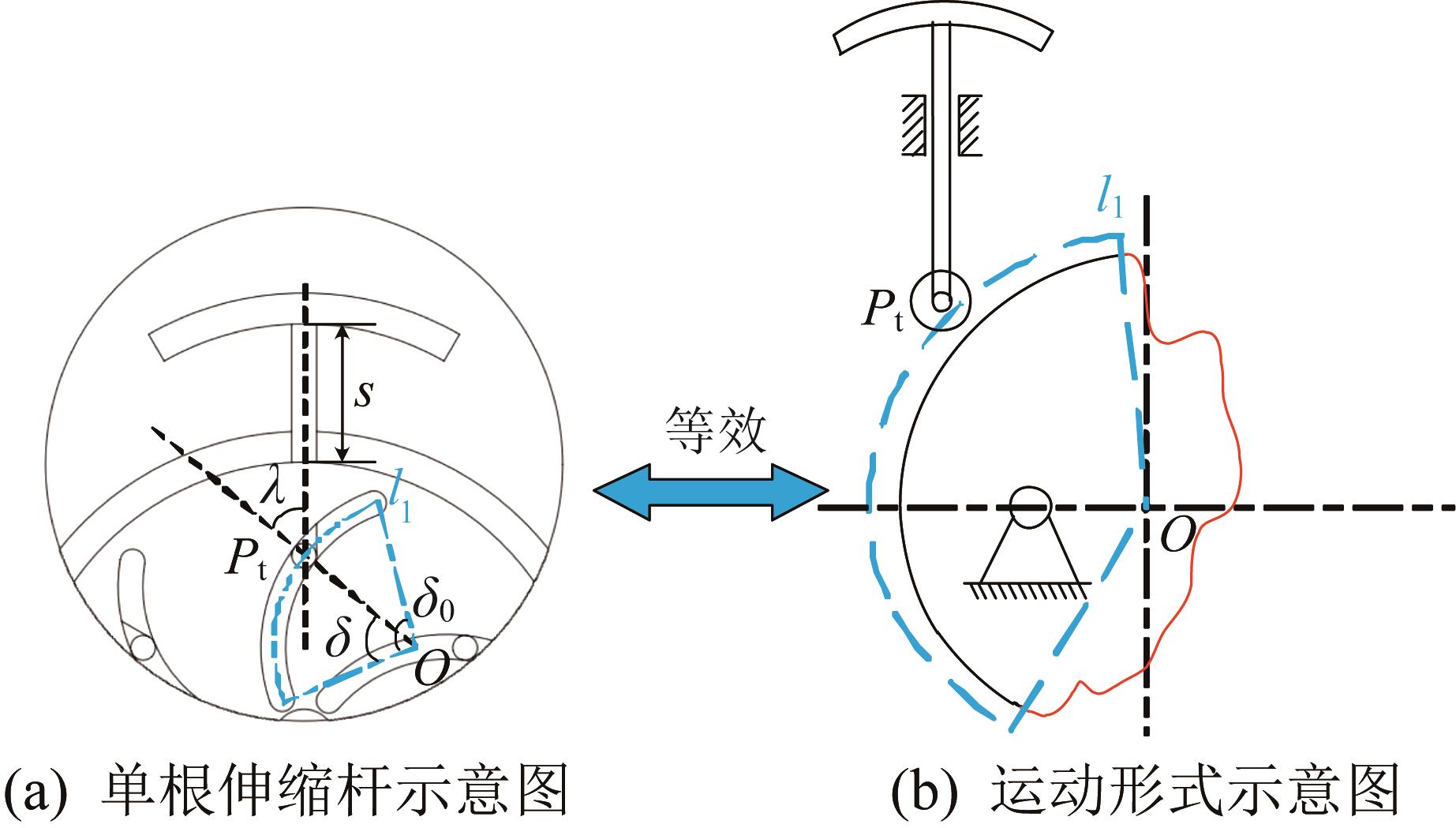
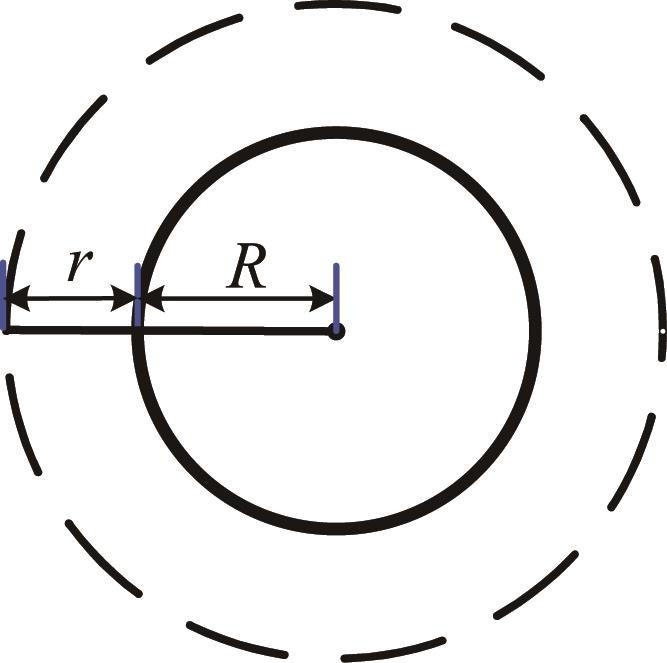
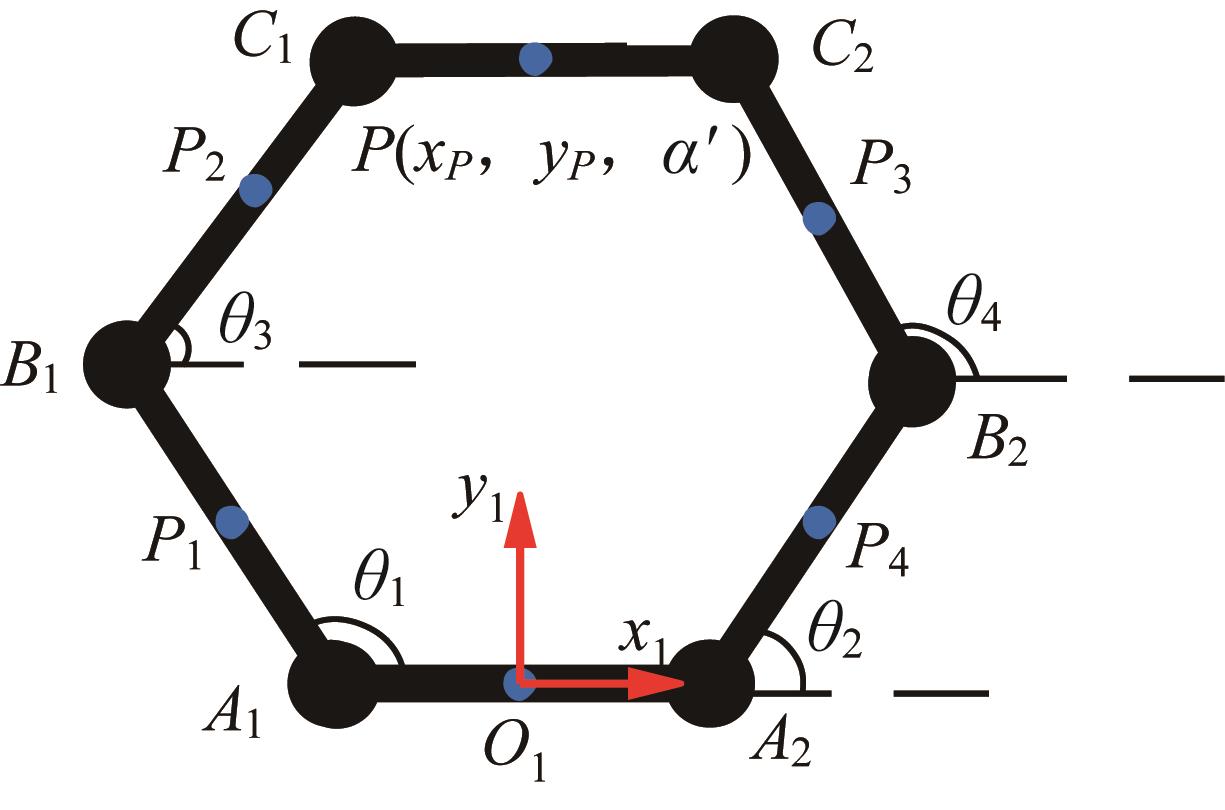
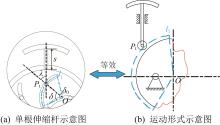
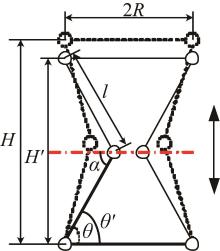
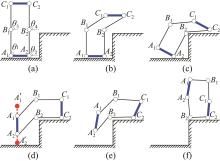
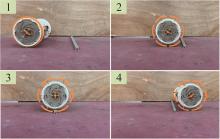
Fig.3 Schematic of partial amplification of variable-diameter platform
|
|

|
|
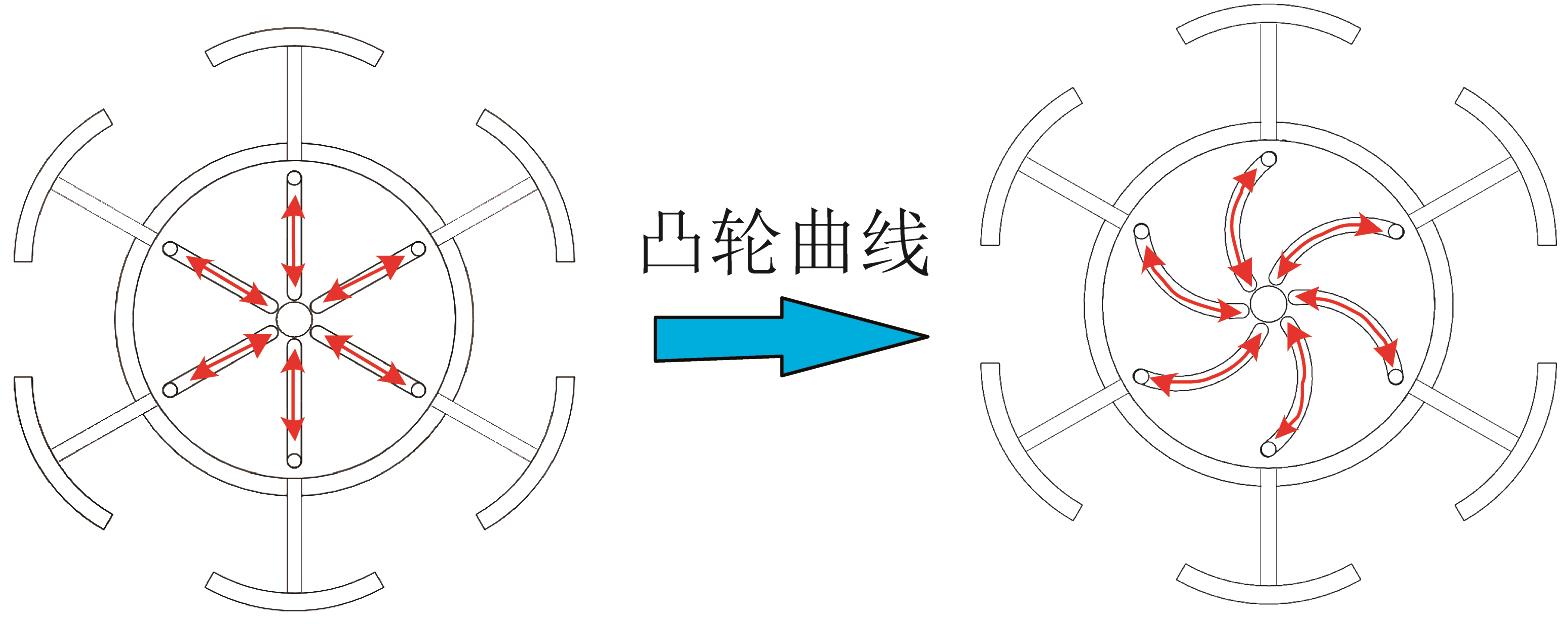
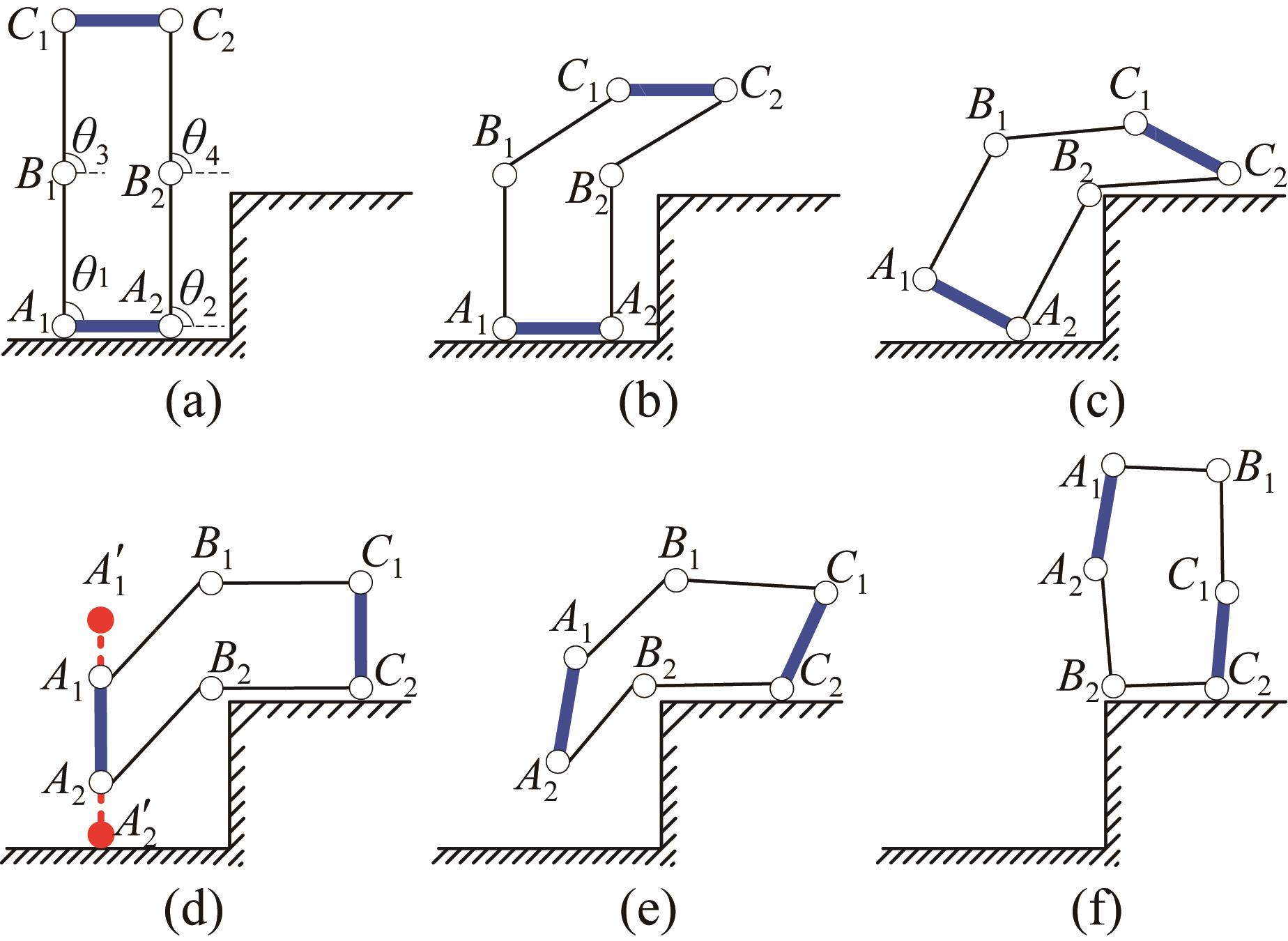
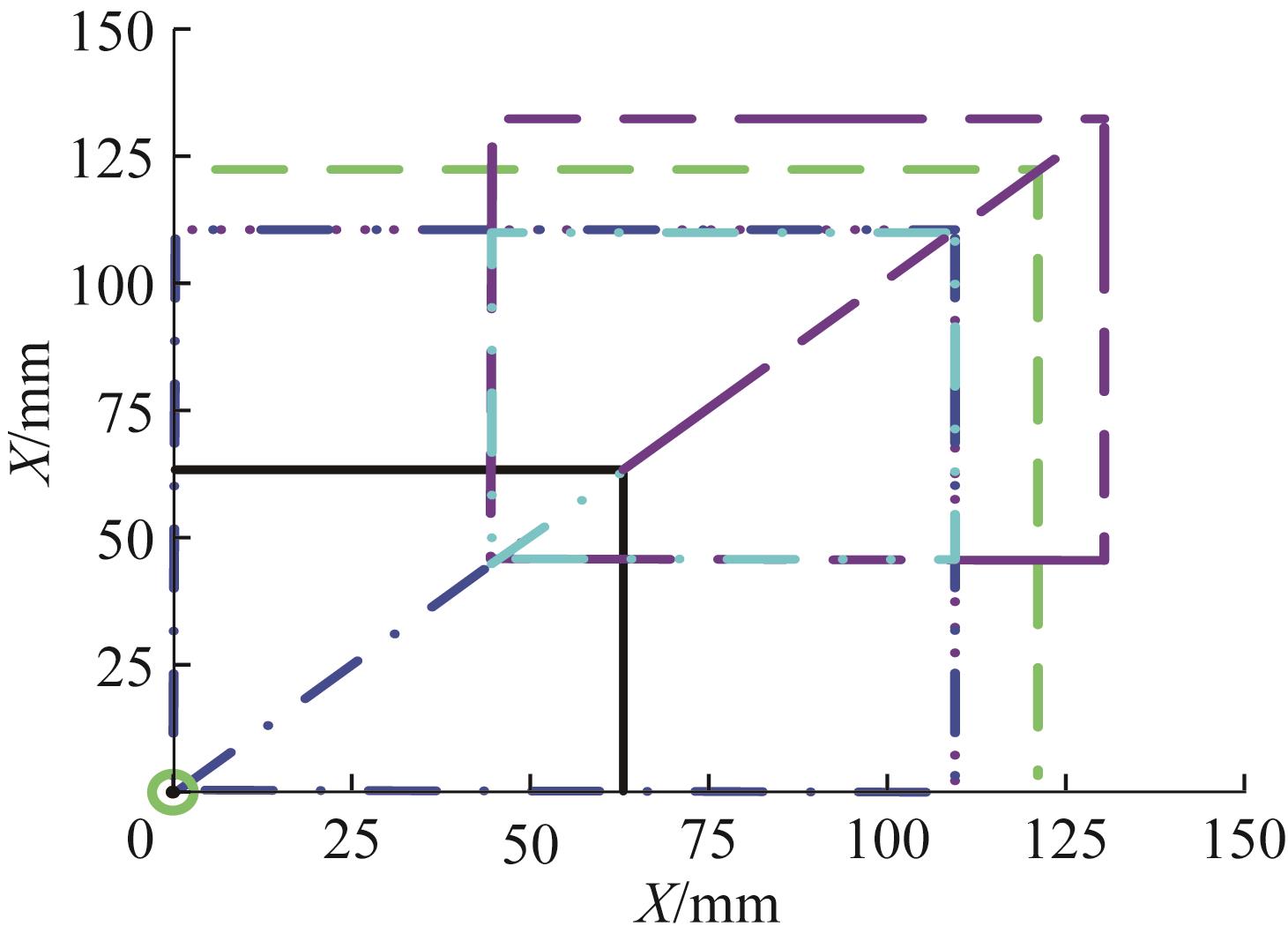
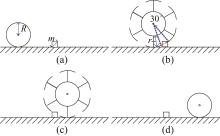
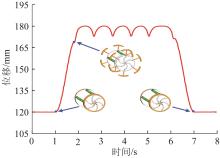
Fig.4 Movement trajectory change of telescopic rod
|
|
|
|
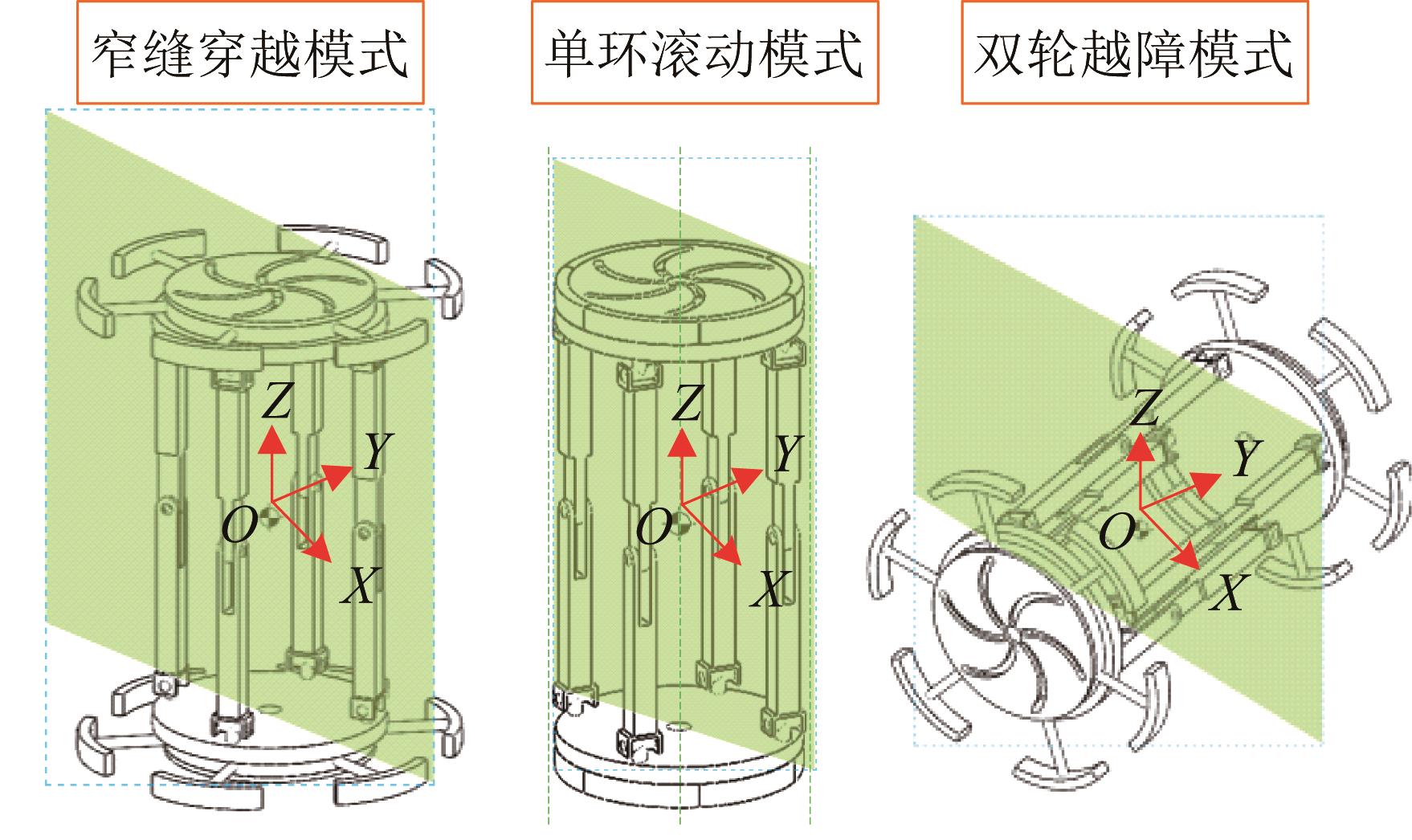
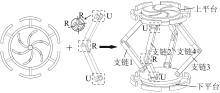
Fig.5 Variable-diameter multi-mode mobile parallel robot
|
|
|
|
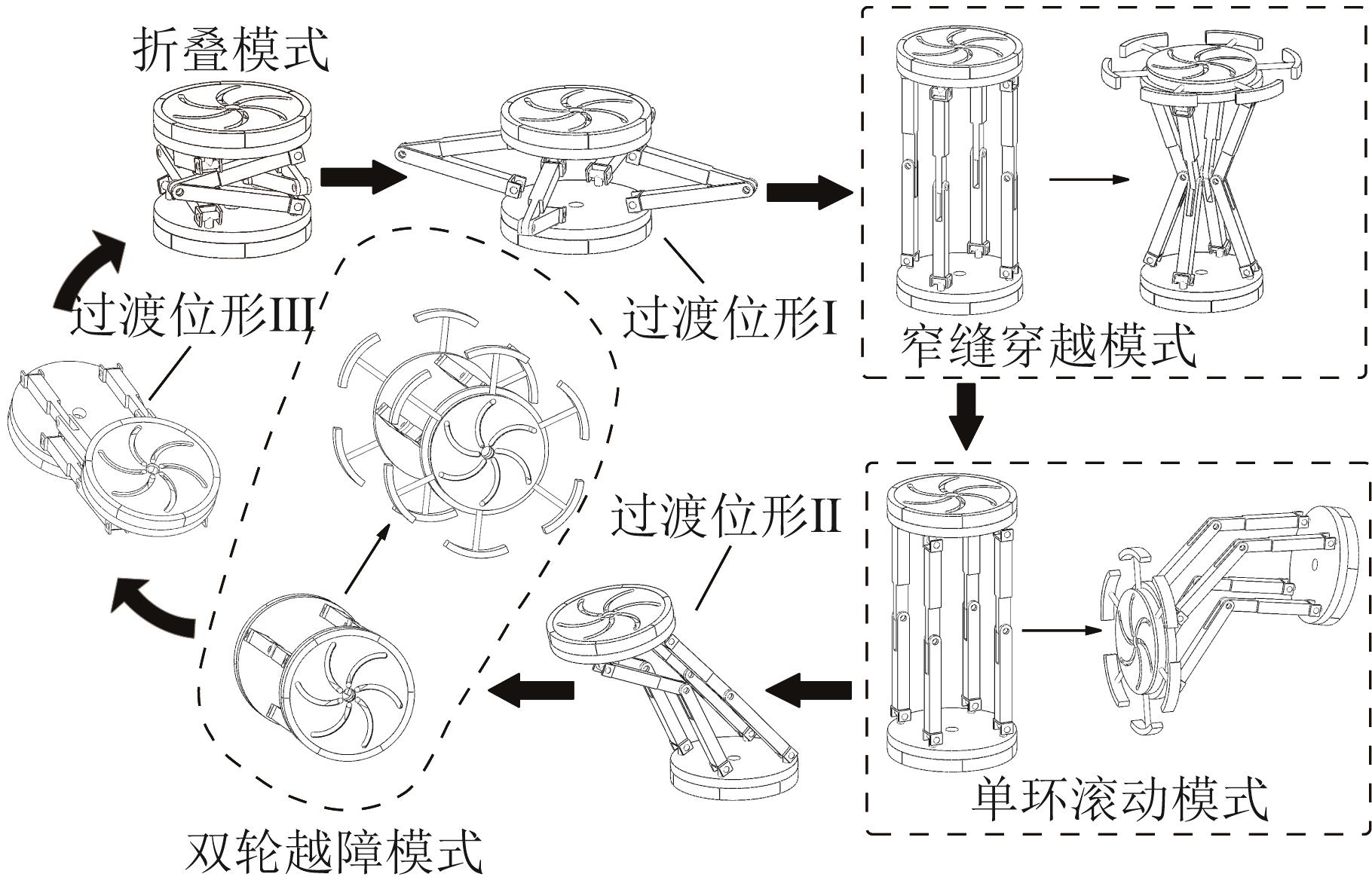
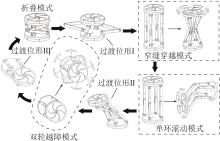
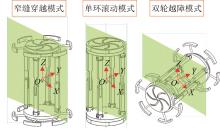
Fig.6 Schematic diagram of robot multi-mode switching
|
|
|
|
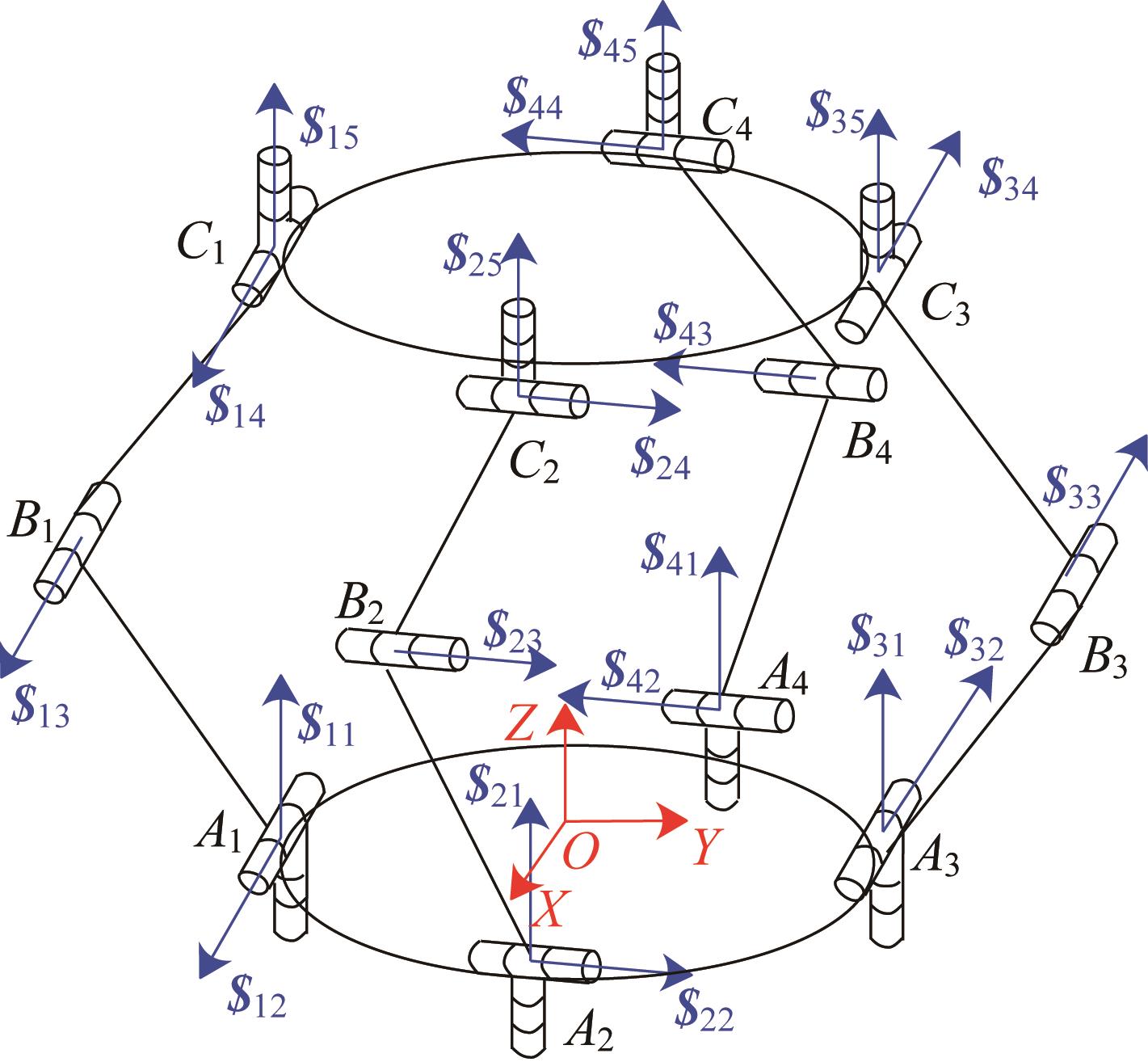
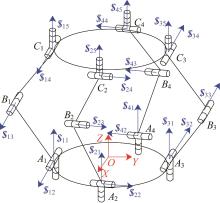
Fig.7 Diagram of 4-URU parallel mechanism
|
|
|
|
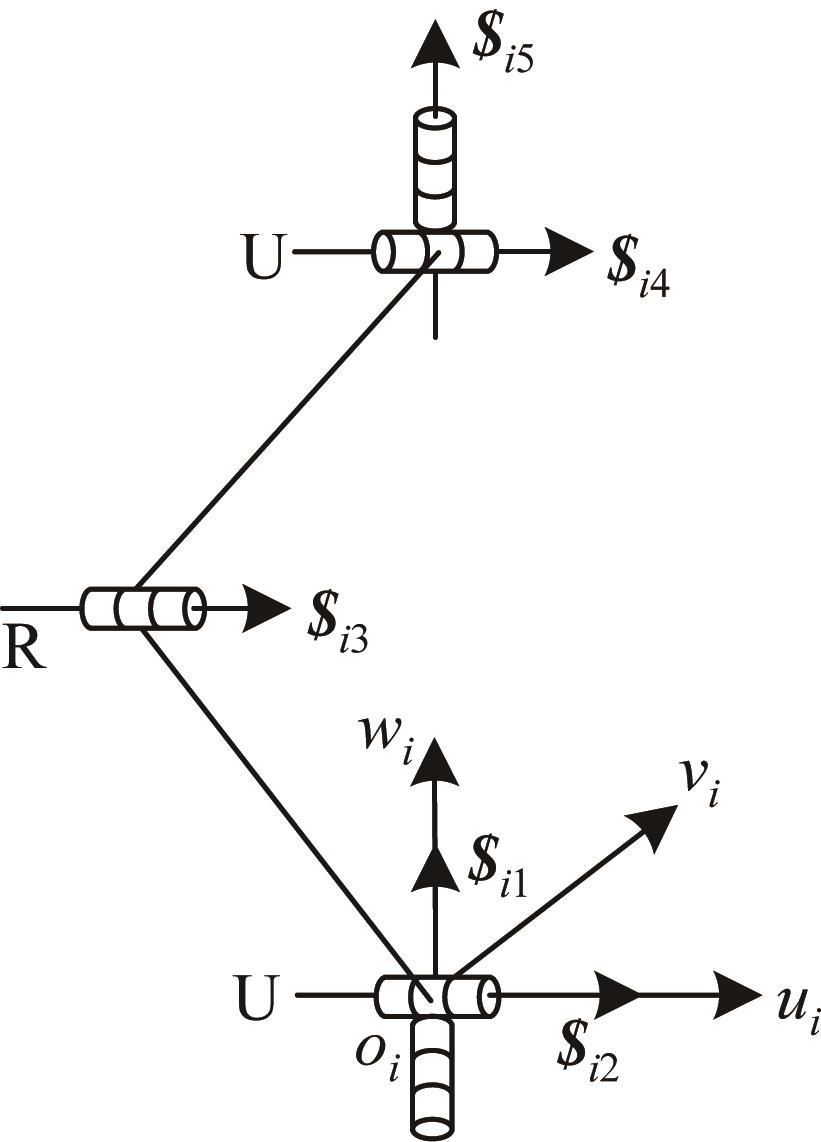
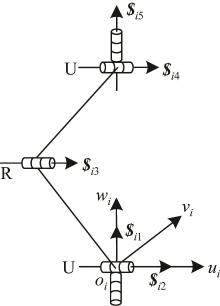
Fig.8 Spiral analysis of URU branch chain
|
|
| 运动模式 | 运动螺旋 | 约束螺旋 | 自由度 | 运动性质 |
|---|
| 窄缝穿越模式 | | | 4 | 沿X、Y、Z轴的移动和绕Z轴的转动 | | 单环滚动模式 | | | 3 | 沿X轴的移动和绕Y、Z轴的转动 | | 双轮越障模式 | 无 | 无 | 1 | 绕X轴转动 |
|
|
Table 1 Degrees of freedom of 4-URU parallel mechanism in different modes
|
|
|
|
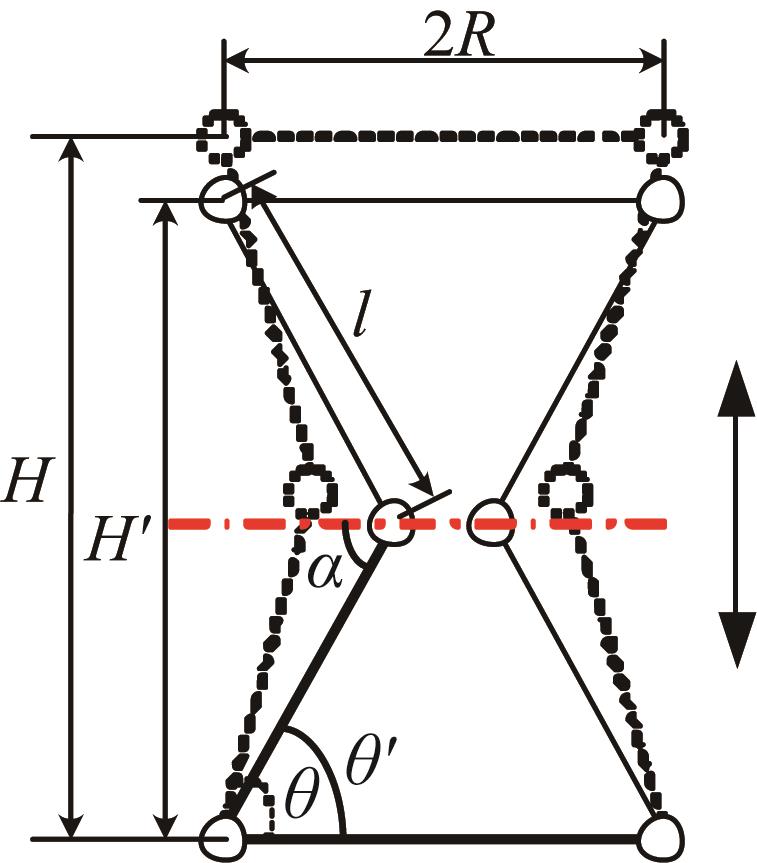
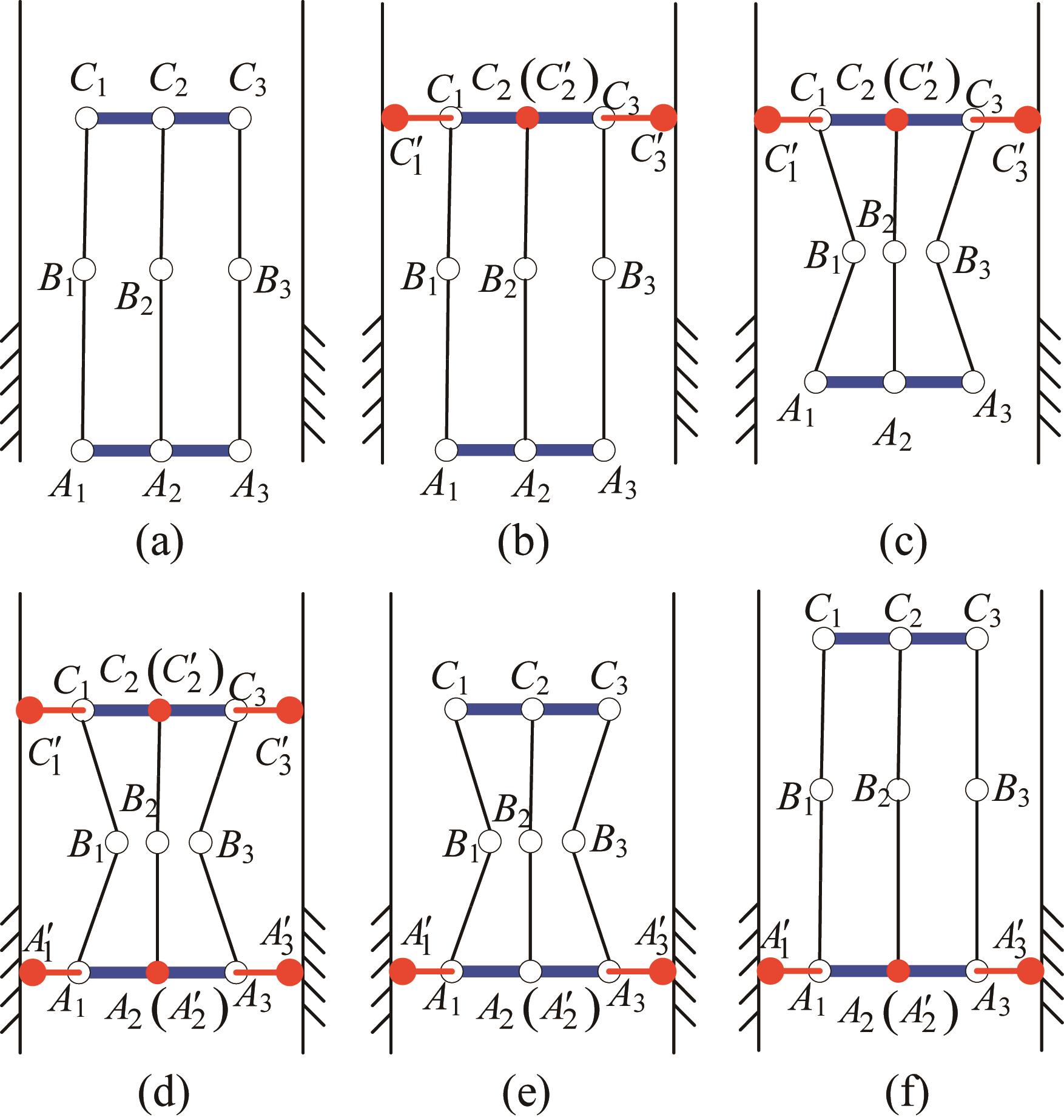
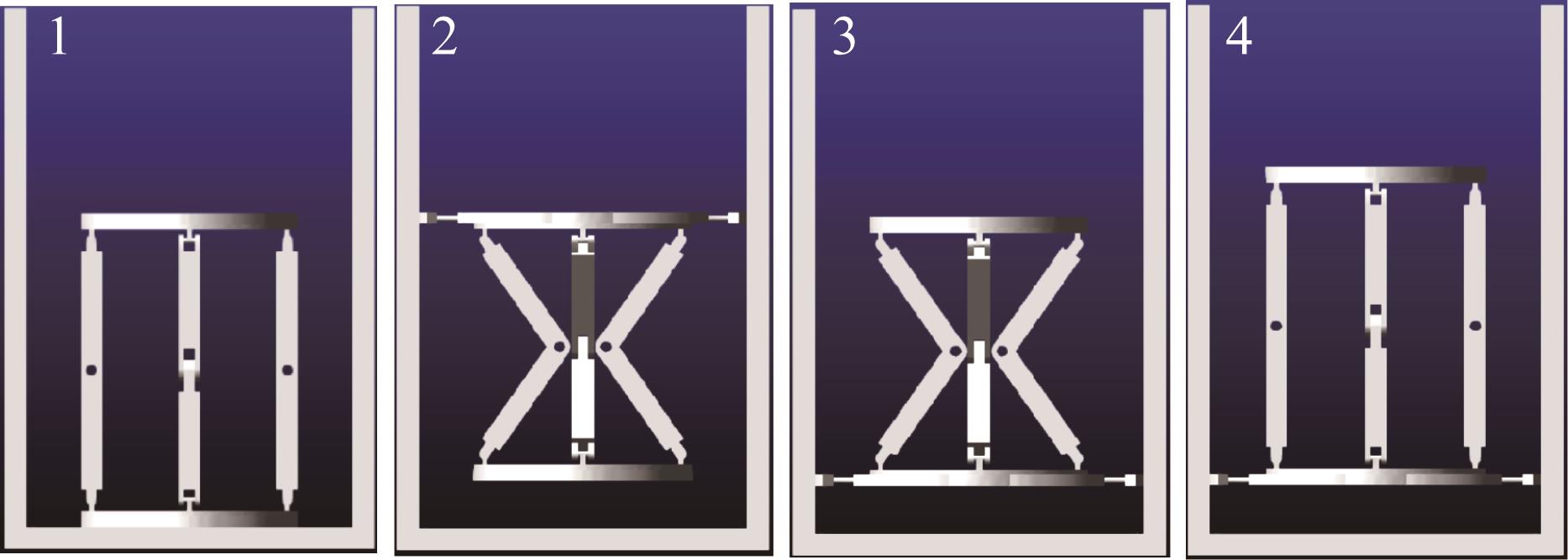
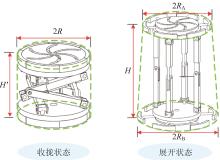
Fig.9 Folding and unfolding principle of variable-diameter platform
|
|
|
|
Fig.10 Folding and unfolding principle of URU branch chain
|
|
|
|
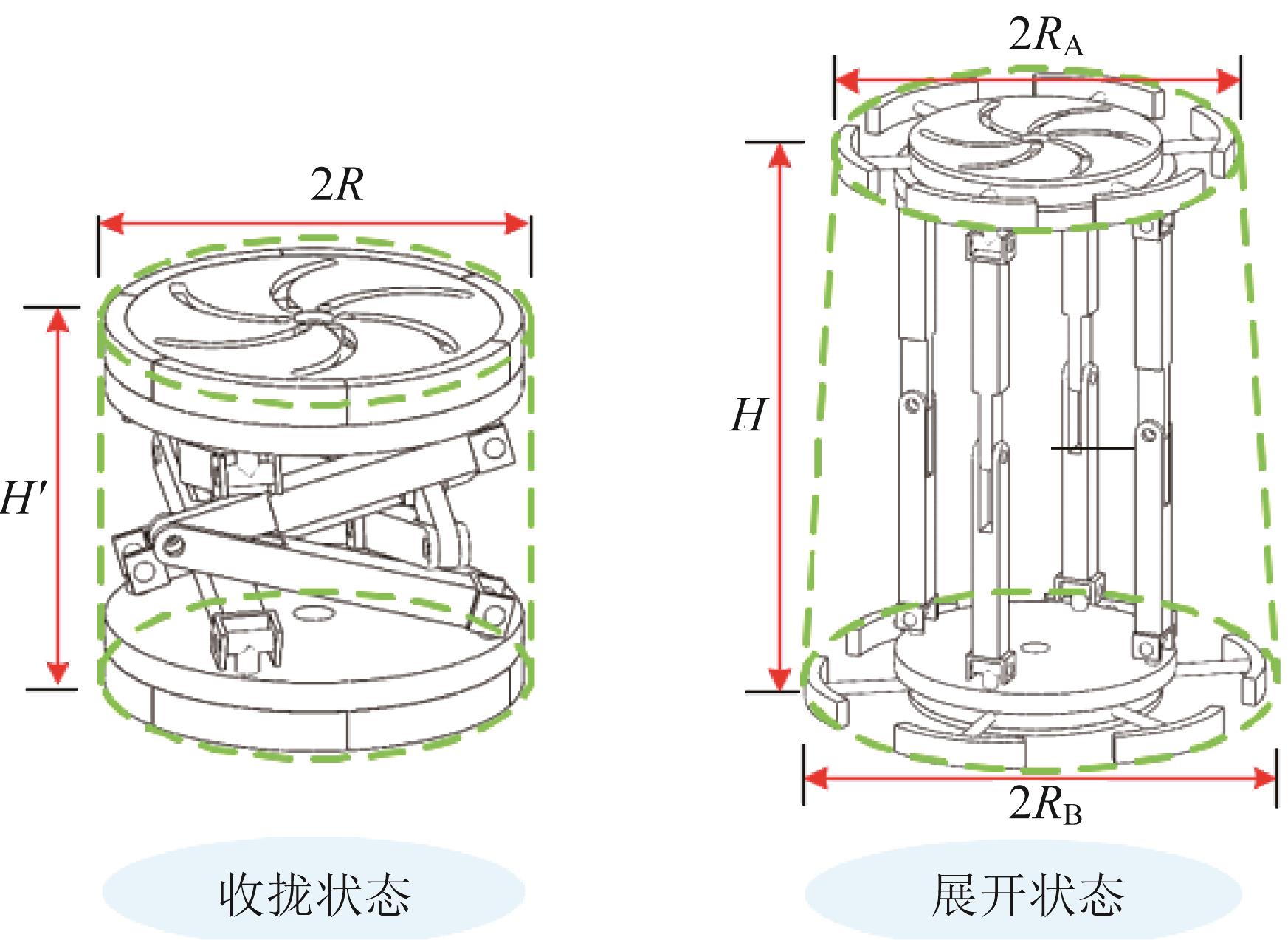
Fig.11 Schematic diagram of volume envelope of robot in the retraction and extension states
|
|
|
|
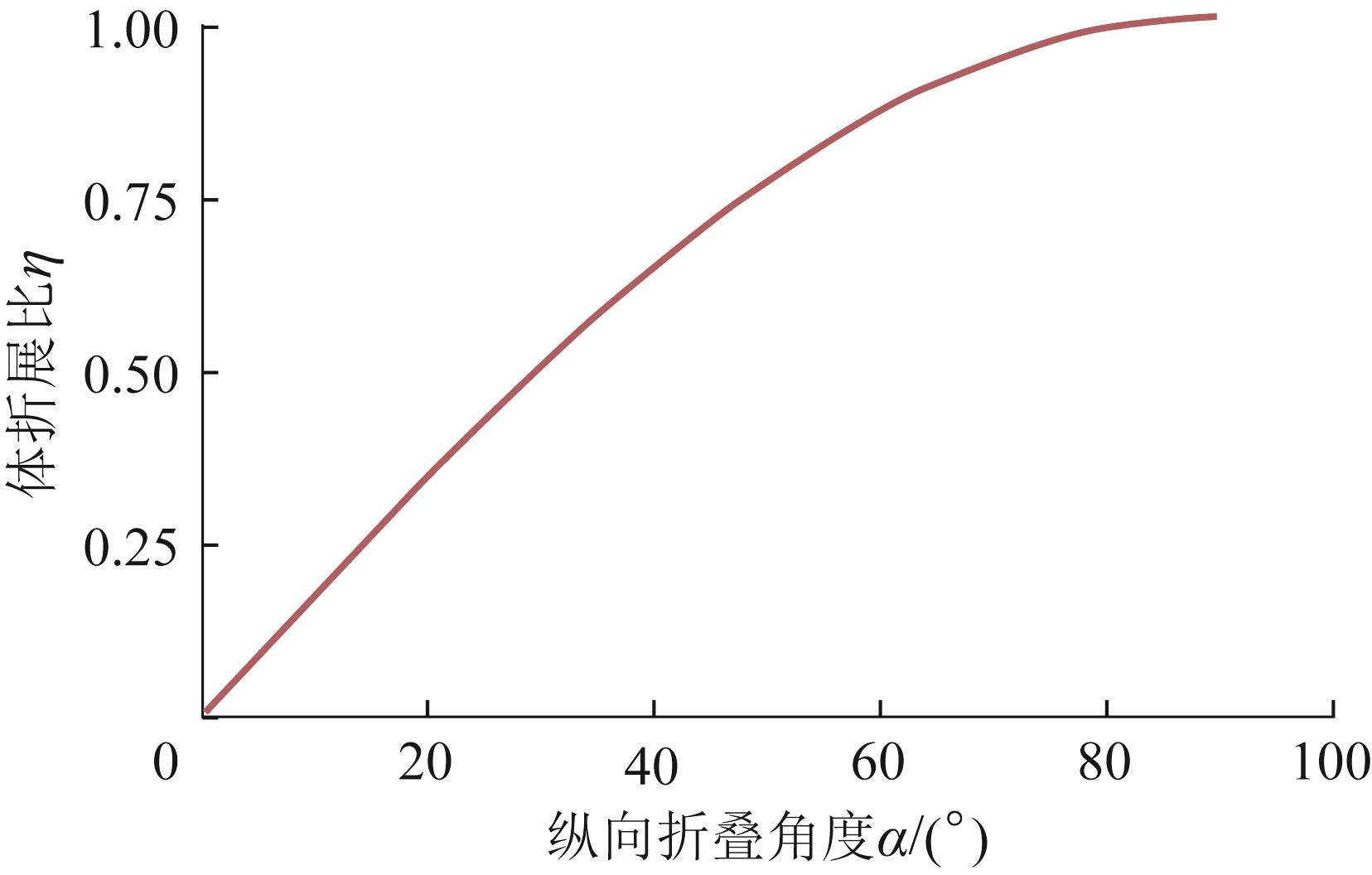
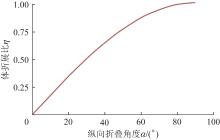
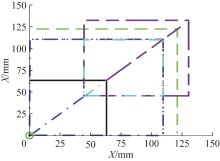
Fig.12 Variation curve of folding-to-unfolding ratio of robot
|
|
|
|
Fig.13 Narrow-slit crossing gait of robot
|
|
|
|
Fig.14 Kinematic model of single-loop rolling mode
|
|
|
|
Fig.15 Single-loop rolling gait of robot
|
|
|
|
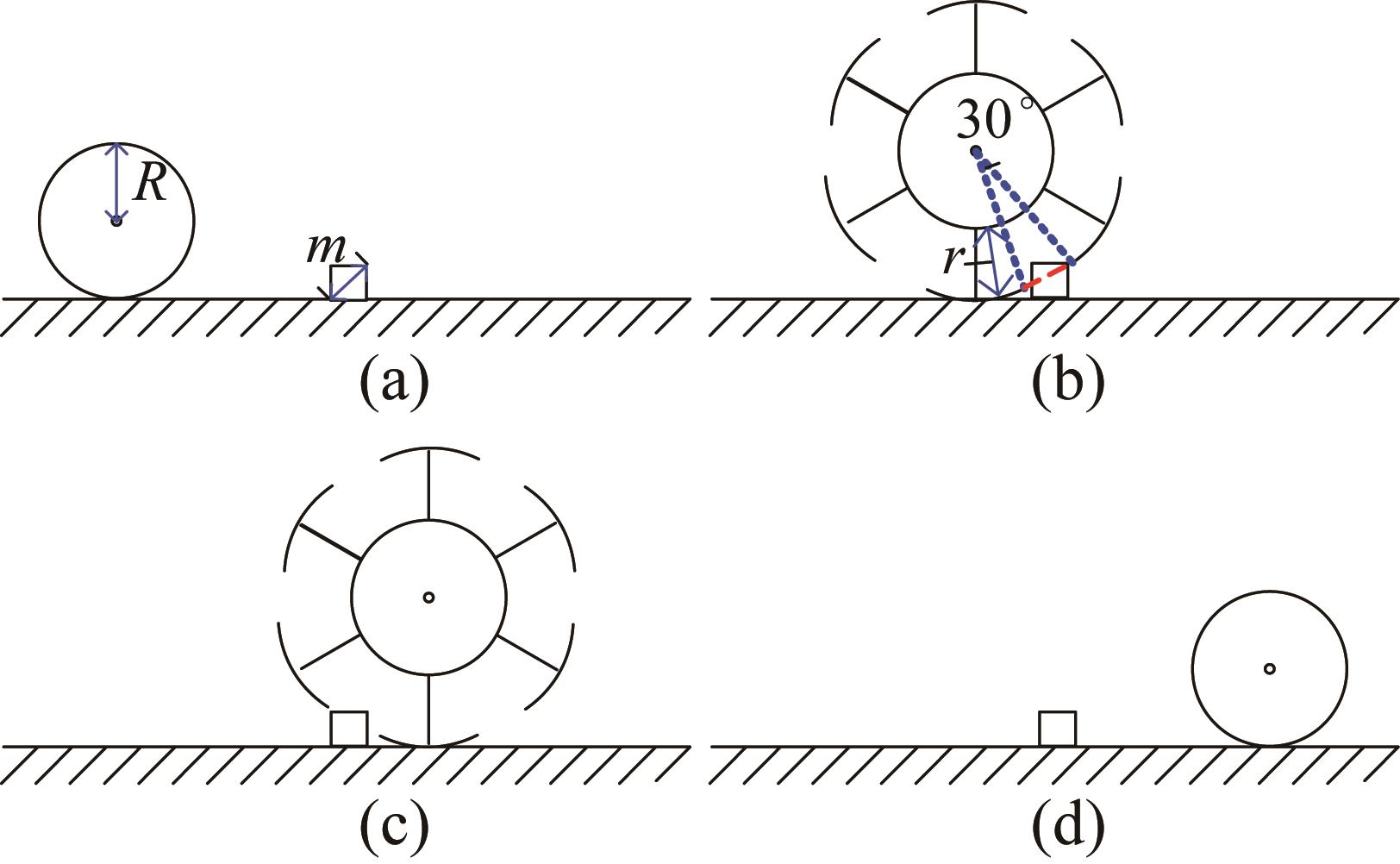
Fig.16 Dual-wheel obstacle-crossing gait of robot
|
|
|
|
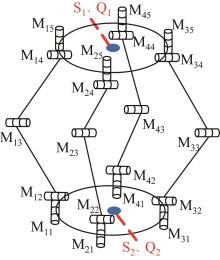
Fig.17 Distribution diagram of drive motors in robot
|
|
| 运动模式 | 窄缝穿越模式 | 单环滚动模式 | 双轮越障模式 |
|---|
| 电机状态 | 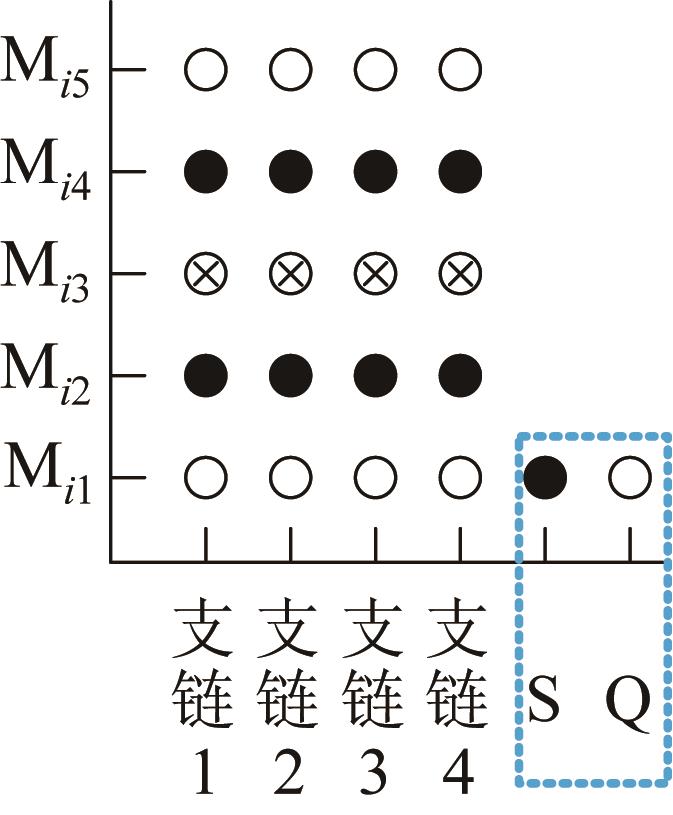 | 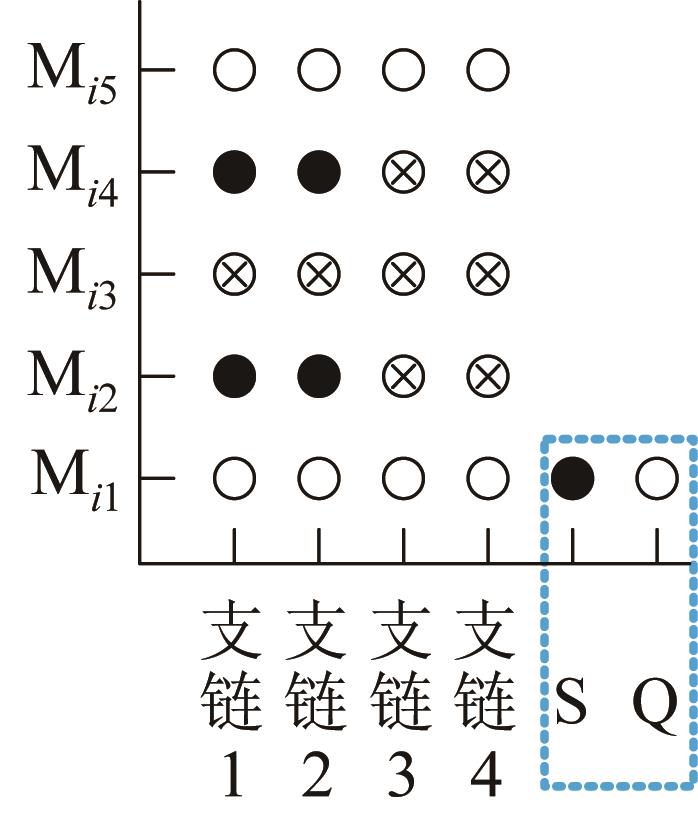 | 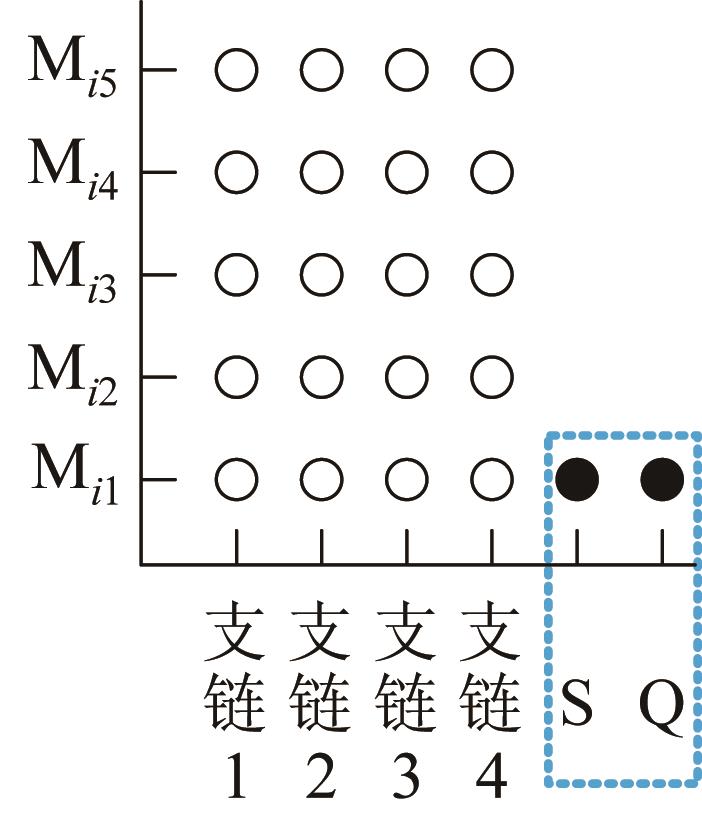 |
|
|
Table 2 Drive motor status under different modes
|
|
|
|
Fig.18 Motion tendency of robot centroid under different modes
|
|
|
|
Fig.19 Projection of robot centroid under single-loop rolling mode
|
|
| 参数 | 数值 |
|---|
| 接触刚度/(N/mm) | 10 000 | | 静摩擦因数 | 0.4 | | 动摩擦因数 | 0.3 | | 碰撞力指数 | 1.5 | | 最大穿透深度/mm | 0.1 |
|
|
Table 3 Environment-related parameters
|
|

|
|
Fig.20 Narrow-slit crossing simulation result of robot
|
|
|
|
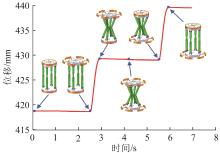
Fig.21 Displacement curve of upper platform centroid of robot under narrow-slit crossing mode
|
|

|
|
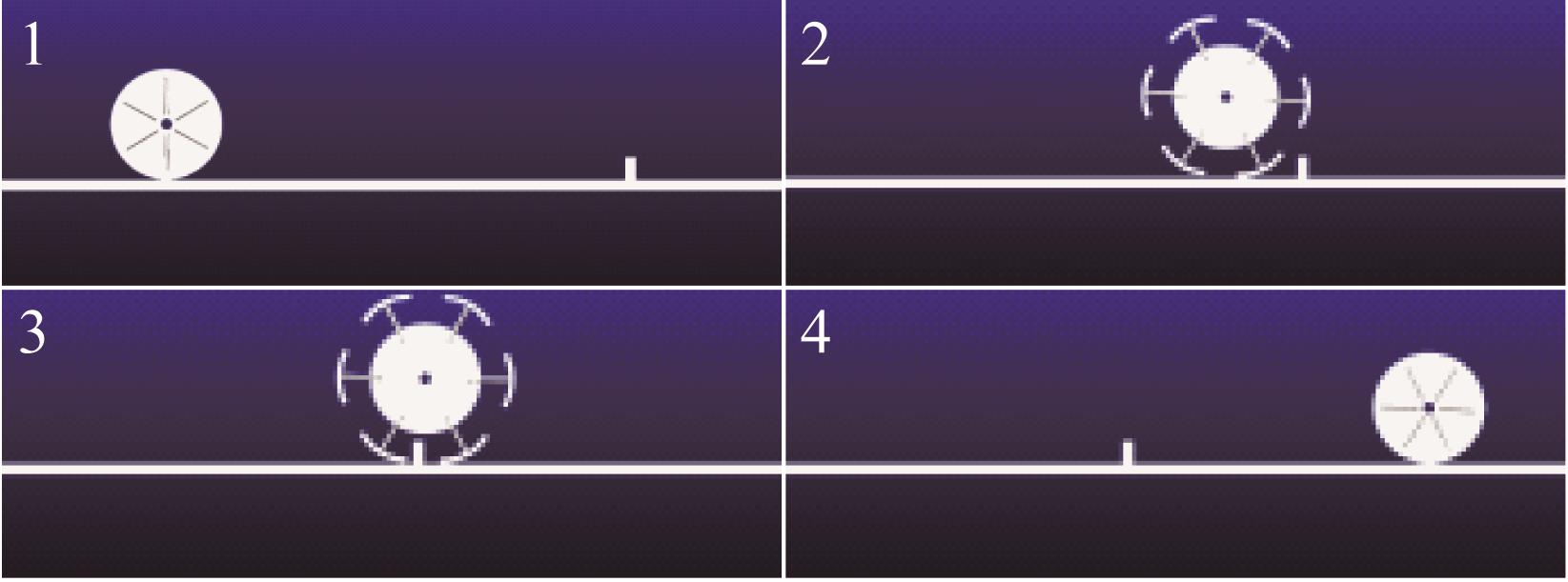
Fig.22 Single-loop rolling simulation result of robot
|
|
|
|
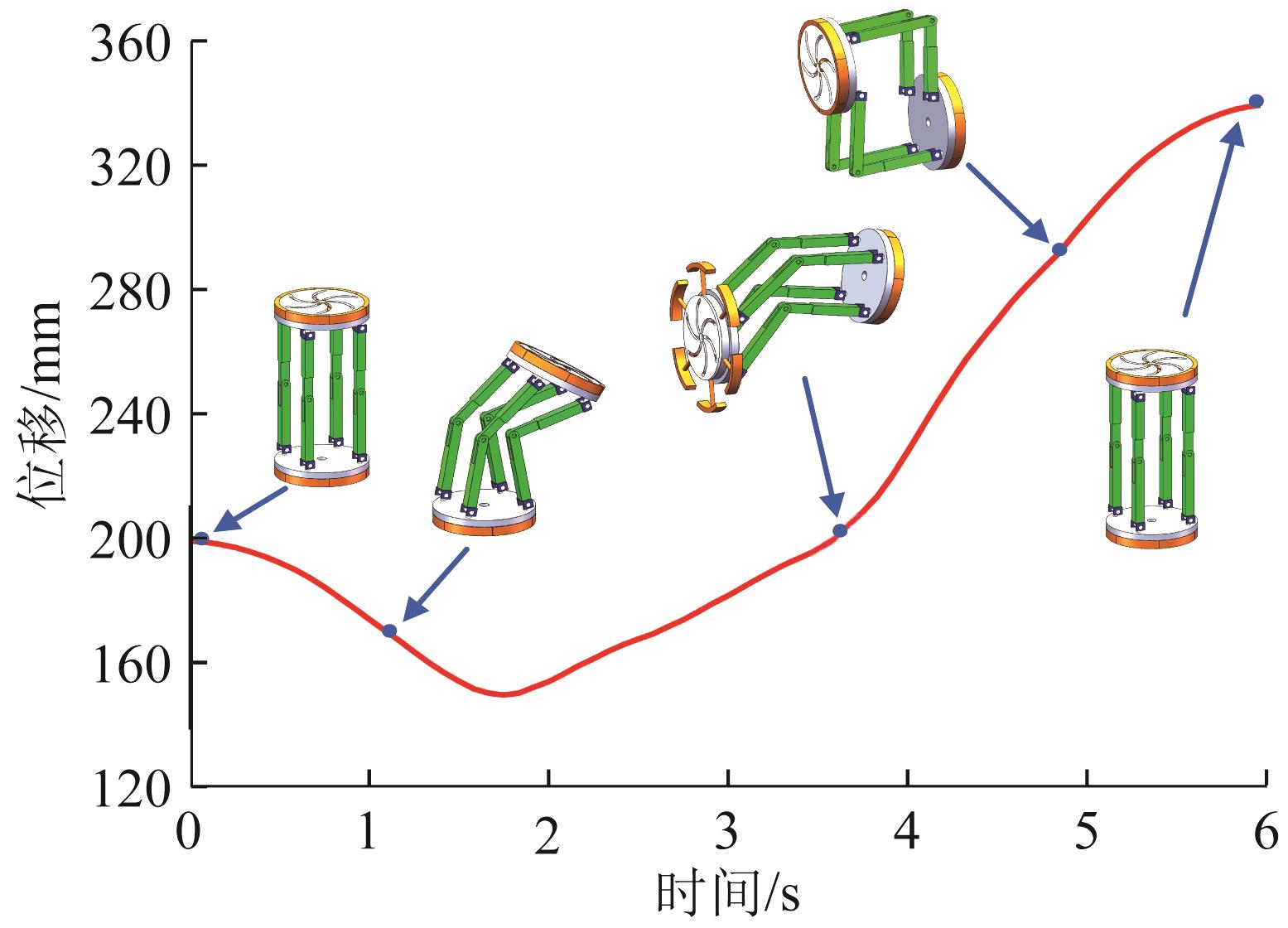
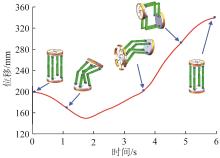
Fig.23 Displacement curve of robot centroid under single-loop rolling mode
|
|
|
|
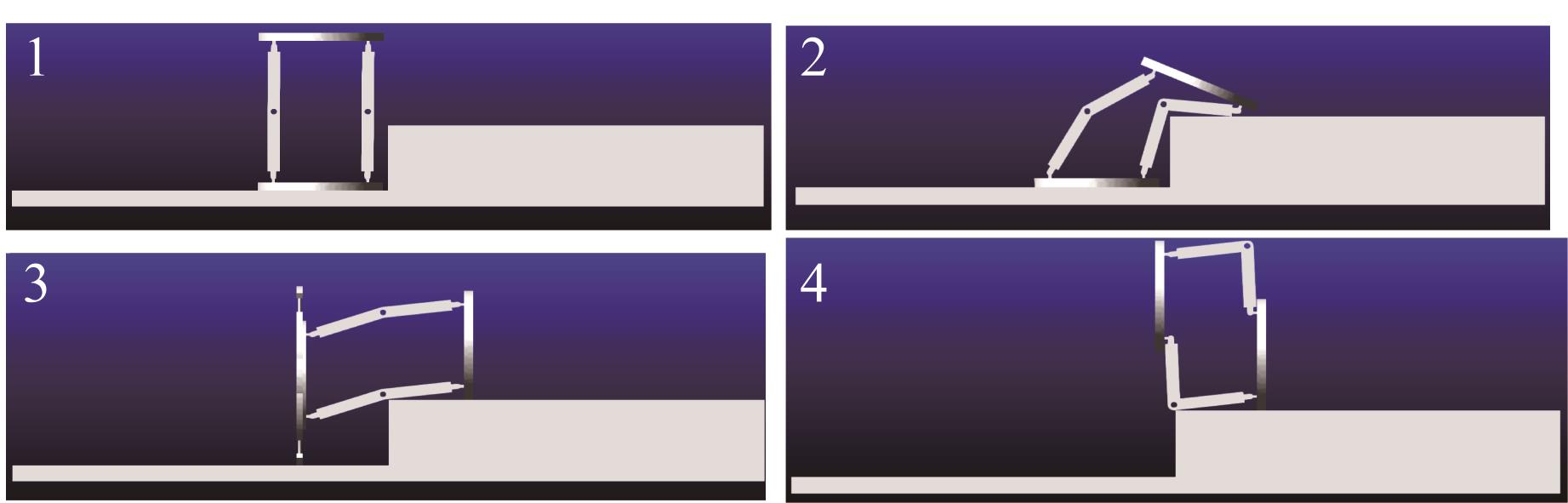
Fig.24 Dual-wheel obstacle-crossing simulation result of robot
|
|
|
|
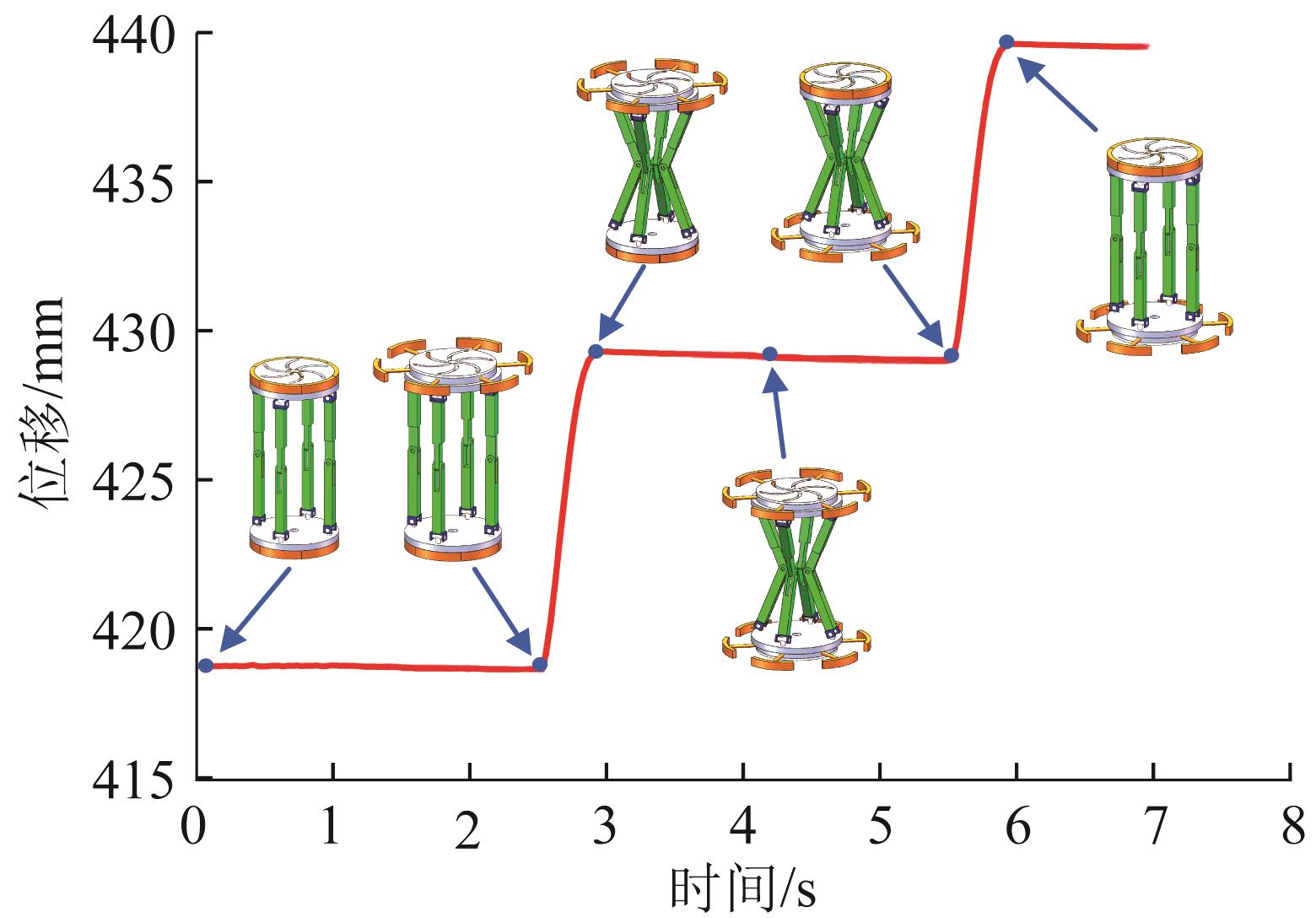
Fig.25 Displacement curve of robot centroid under dual-wheel obstacle-crossing mode
|
|

|
|
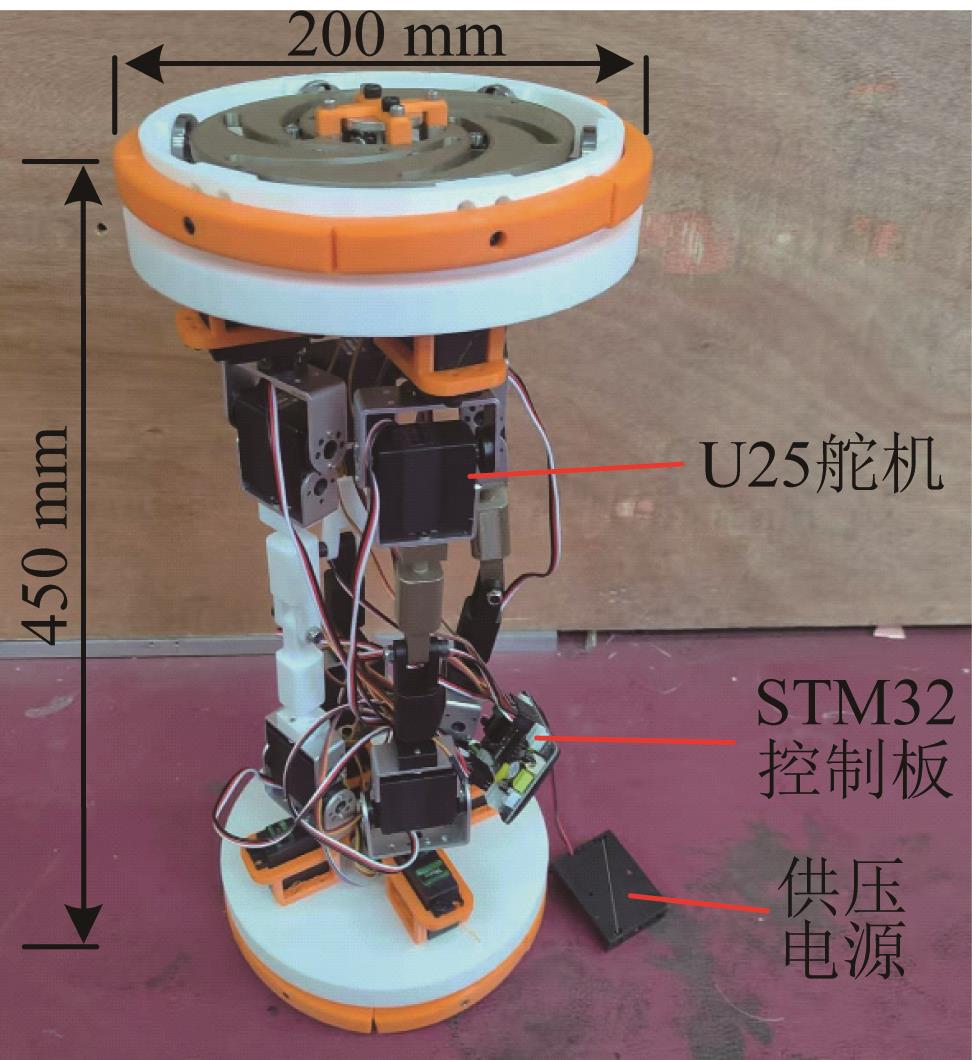
Fig.26 Robot prototype
|
|
| 参数 | 属性和数值 |
|---|
| 整机尺寸/(mm×mm×mm) | 200×200×450 | | 整机质量/kg | 2.35 | | 材料 | PLA、铝合金、不锈钢 | | 工作电压/V | 3.3(伺服舵机)、8(减速电机) |
|
|
Table 4 Basic parameters of robot prototype
|
|

|
|
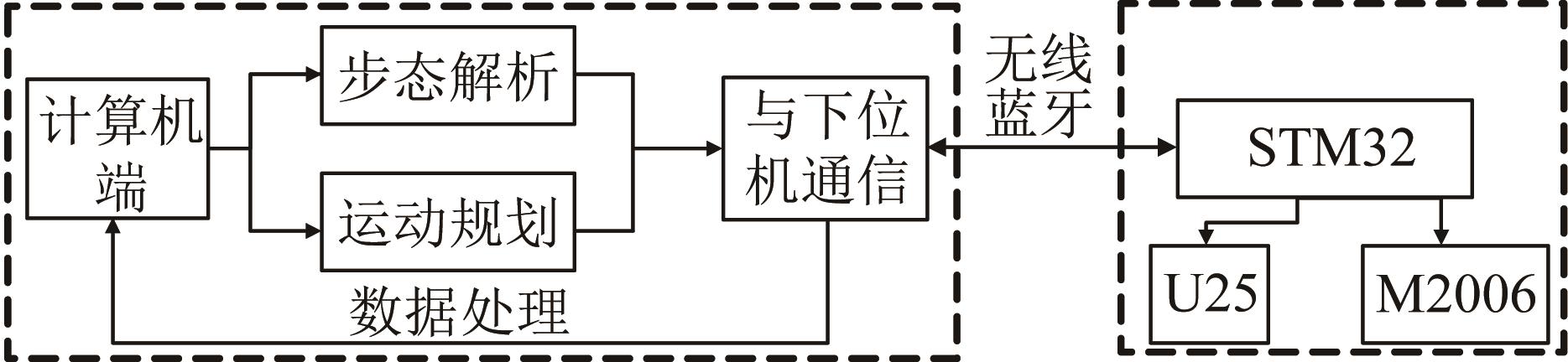
Fig.27 Robot control system block diagram
|
|

|
|
Fig.28 Experiment on narrow-slit crossing mode of robot
|
|

|
|
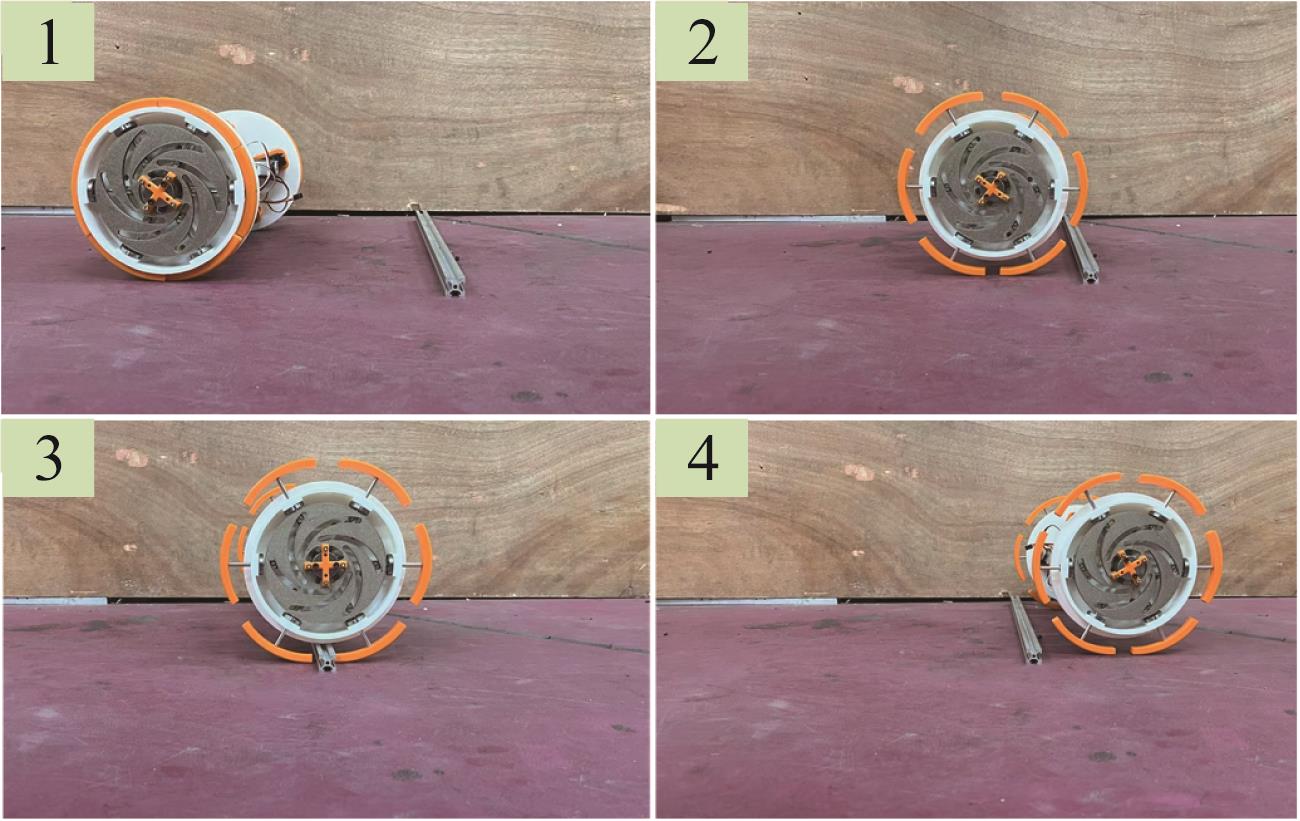
Fig.29 Experiment on single-loop rolling mode of robot
|
|
|
|
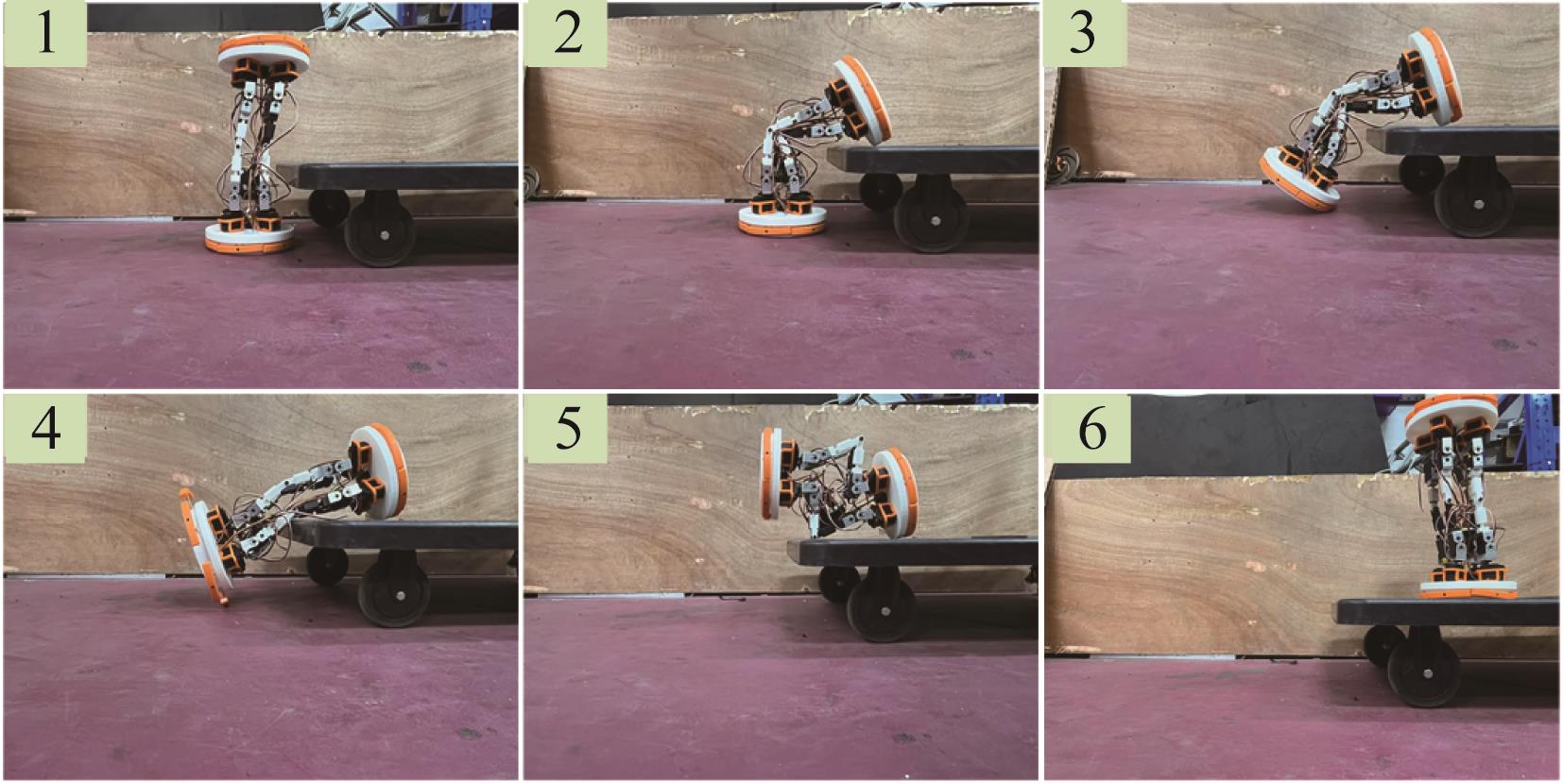
Fig.30 Experiment on dual-wheel obstacle-crossing mode of robot
|
|

|
|
|
|

|
|
|