| Digital and Intellectualized Design |
|


|
|
|
| Working stage identification of excavators based on information fusion and multi-granularity cascaded forest model |
Deying SU( ),Shaojie WANG,Xiangjian BU,Hongyan RAO,Liang HOU() ),Shaojie WANG,Xiangjian BU,Hongyan RAO,Liang HOU() |
| Pen -Tung Sah Institute of Micro-Nano Science and Technology, Xiamen University, Xiamen 361102, China |
|
|
|
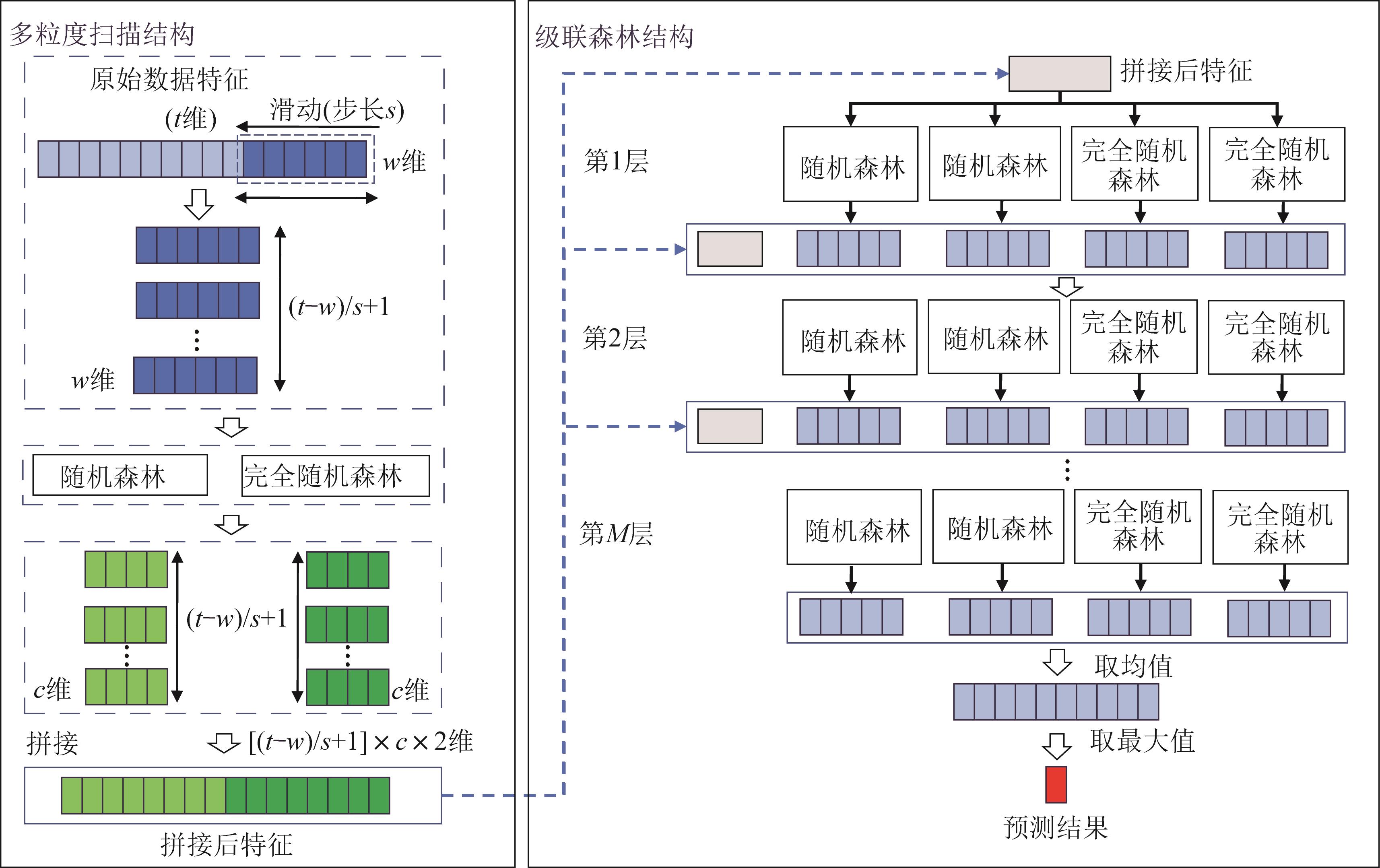
Abstract An intelligent recognition approach was proposed, which was based on information fusion and a multi-granularity cascaded forest model (IFMCFM) to tackle the challenge of low reliability in excavator working stage identification methods. Information fusion technology was utilized to merge the category probability vector of the excavator working stage with high-importance features, thereby forming new identification features. The novel features were subsequently fed into the cascaded forest model, which was trained using different proportions of the training set. Subsequent analysis was carried out on the identification results. The identification outcomes of IFMCFM were compared with those of other models, including DAGSVM (directed acyclic graph support vector machine), PCA-SVM (support vector machine based on principal component analysis), LIBSVM (library for support vector machines), and LSTM (long short-term memory). The research findings revealed that the recognition accuracy, recall, and F1 (harmonic average of accuracy and recall) index of IFMCFM were 95.00%, 95.17%, and 95.02% respectively, indicating good recognition performance when the training set ratio was 80%. In comparison to the other identification models, the highest accuracy and reliability were exhibited by IFMCFM. IFMCFM can effectively identify the operation stage of excavators and has high application value.
|
|
Received: 28 October 2023
Published: 04 March 2024
|
|
|
|
Corresponding Authors:
Liang HOU
E-mail: 19920190154058@stu.xmu.edu.cn;hliang@xmu.edu.cn
|
基于信息融合和多粒度级联森林模型的挖掘机作业阶段智能识别
为了解决挖掘机作业阶段识别方法可靠性较低的问题,提出了一种基于信息融合和多粒度级联森林模型(information fusion and multi-granularity cascade forest model,IFMCFM)的智能识别方法。利用信息融合技术将挖掘机作业阶段的类别概率向量与高重要度特征进行融合,形成新的识别特征;将新特征输入级联森林模型,采用不同比例的训练集对模型进行训练并对识别结果进行分析;将IFMCFM的识别结果与DAGSVM(directed acyclic graph support vector machine,有向无环图支持向量机)、PCA-SVM(support vector machine based on principal component analysis,基于主成分分析的支持向量机)、LIBSVM(library for support vector machines,支持向量机库)和LSTM(long short-term memory,长短期记忆)的识别结果进行对比。研究结果表明:当训练集比例为80%时,IFMCFM的识别准确率、召回率和F1(精确度和召回率的调和平均数)指标分别为95.00%,95.17%和95.02%,识别效果较优;相比于其他识别模型,IFMCFM的识别准确性和可靠性最高。IFMCFM可以有效地识别挖掘机作业阶段,具有较高的应用价值。
关键词:
挖掘机,
作业阶段,
智能识别,
信息融合,
多粒度级联森林模型
|
|
| [1] |
高宇, 冯培恩, 彭贝, 等. 液压挖掘机分阶段功率匹配控制技术[J]. 哈尔滨工程大学学报, 2017, 38(9): 1461-1469. doi:10.11990/jheu.201605053
GAO Y, FENG P E, PENG B, et al. Stage-based power matching control of hydraulic excavator[J]. Journal of Harbin Engineering University, 2017, 38(9): 1461-1469.
doi: 10.11990/jheu.201605053
|
|
|
| [2] |
BAO R, SADEGHI M A, GOLPARVAR F M. Characterizing construction equipment activities in long video sequences of earthmoving operations via kinematic features [C]// Construction Research Congress. San Juan, May 31- June. 2, 2016.
|
|
|
| [3] |
KIM J, CHI S, SEO J. Interaction analysis for vision-basedactivity identification of earthmoving excavators and dumptrucks [J]. Automation in Construction, 2018, 87(3): 297-308.
|
|
|
| [4] |
FANG W, DING L, ZHONG B, et al. Automated detection of workers and heavy equipment on construction sites: a convolutional neural network approach [J]. Advanced Engineering Informatics, 2018, 37: 139-149.
|
|
|
| [5] |
柳齐. 基于动作序列识别的挖掘机智能节能方法研究[D]. 厦门: 华侨大学, 2014.
LIU Q. Intelligent energy-saving method research of excavator based on identifying the sequence of actions [D]. Xiamen: Huaqiao University, 2014.
|
|
|
| [6] |
AHN C R, LEE S H, PEÑA M F. Application of low-cost accelerometers for measuring the operational efficiency of a construction equipment fleet [J]. Journal of Computing in Civil Engineering, 2015, 29(2): 04014042.
|
|
|
| [7] |
冯培恩, 彭贝, 高宇, 等. 液压挖掘机作业循环阶段的智能识别[J]. 浙江大学学报(工学版), 2016, 50(2): 209-217.
FENG P E, PENG B, GAO Y, et al. Intelligent identification for working-cycle stages of hydraulic excavator [J]. Journal of Zhejiang University(Engineering Edition), 2016, 50(2): 209-217.
|
|
|
| [8] |
黄杰, 王东, 王新晴, 等. 液压挖掘机作业循环状态智能识别方法[J]. 浙江大学学报(工学版), 2019, 53(9): 1663-1673.
HUANG J, WANG D, WANG X Q, et al. Intelligent recognition method for working-cycle state of hydraulic excavator[J]. Journal of Zhejiang University(Engineering Edition), 2019, 53(9): 1663-1673.
|
|
|
| [9] |
SHI Y, XIA Y, ZHANG Y, et al. Intelligent identification for working-cycle stages of excavator based on main pump pressure [J]. Automation in Construction, 2020, 109: 102991.
|
|
|
| [10] |
SHI Y, XIA Y, LUO L, et al. Working stage identification of excavators based on control signals of operating handles [J]. Automation in Construction, 2021, 130: 103873.
|
|
|
| [11] |
HOU L, LIN H, WANG S, et al. Feature-based sensor configuration and working-stage recognition of wheel loader[J]. Automation in Construction, 2022, 141: 104401.
|
|
|
| [12] |
单增海, 李志远, 张旭, 等. 基于多传感器信息融合和多粒度级联森林模型的液压泵健康状态评估[J]. 中国机械工程, 2021, 32(19): 2374-2382. doi:10.3969/j.issn.1004-132X.2021.19.013
SHAN Z H, LI Z Y, ZHANG X, et al. Health status assessment of hydraulic pumps based on multi-sensor information fusion and multi-grained cascade forest model[J]. China Mechanical Engineering, 2021, 32(19): 2374-2382.
doi: 10.3969/j.issn.1004-132X.2021.19.013
|
|
|
| [13] |
于晨晖, 王浩名, 李一, 等. 基于深度森林的高压断路器弹簧机构状态识别[J]. 高压电器, 2023, 59(2): 37-43, 51.
YU C H, WANG H M, LI Y, et al. State identification of spring operating mechanism for high voltage circuit breaker based on deep forest [J]. High Voltage Apparatus, 2023, 59(2): 37-43, 51.
|
|
|
| [14] |
杨晓晖, 张圣昌. 基于多粒度级联孤立森林算法的异常检测模型[J]. 通信学报, 2019, 40(8): 133-142. doi:10.11959/j.issn.1000-436x.2019132
YANG X H, ZHANG S C. Anomaly detection model based on multi-grained cascade isolation forest algorithm [J]. Journal on Communications, 2019, 40(8): 133-142.
doi: 10.11959/j.issn.1000-436x.2019132
|
|
|
| [15] |
苏赋, 朱威西, 马磊. 基于改进多粒度级联森林的测井岩性识别方法研究与应用[J]. 地球物理学进展, 2021, 36(2): 654-661. doi:10.6038/pg2021EE0131
SU F, ZHU W X, MA L. Research and application of logging lithology identification method based on IgcForest [J]. Progress in Geophysics, 2021, 36(2): 654-661.
doi: 10.6038/pg2021EE0131
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|