| Theory and Method of Mechanical Design |
|


|
|
|
| Research on spatial modeling method for excavation tunnels based on laser scanning and 3D grid map |
Shaojie LIU1( ),Zhihai LI1,Zhixiang LIU2(),Kang ZOU3 ),Zhihai LI1,Zhixiang LIU2(),Kang ZOU3 |
1.Shanxi Coking Coal Xishan Coal Electricity (Group) Co. , Ltd. , Taiyuan 030000, China
2.Research Institute of Mineral Resources Development and Utilization Technology and Equipment, Liaoning Technical University, Fuxin 123000, China
3.School of Mechanical Engineering, Liaoning Technical University, Fuxin 123000, China |
|
|
|
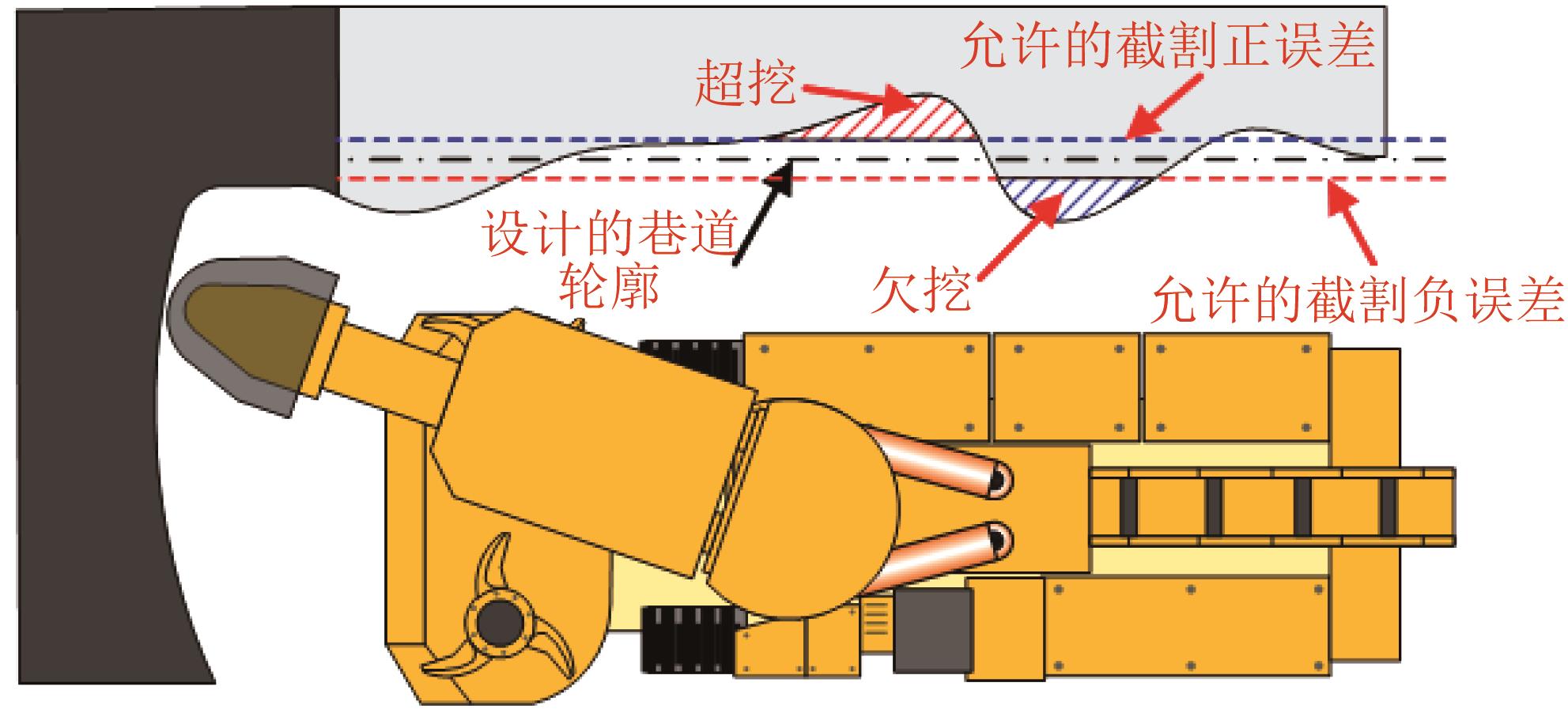
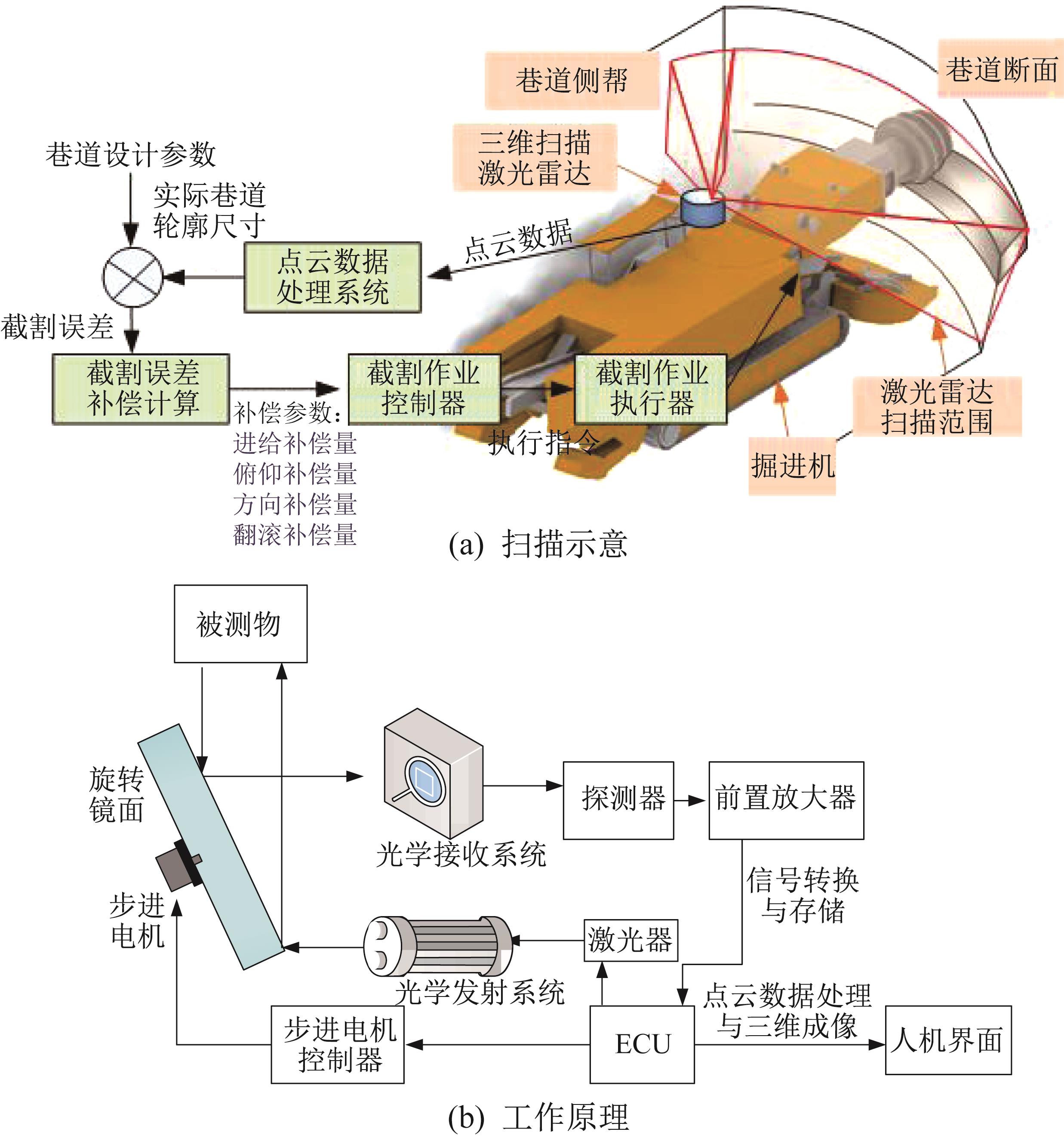
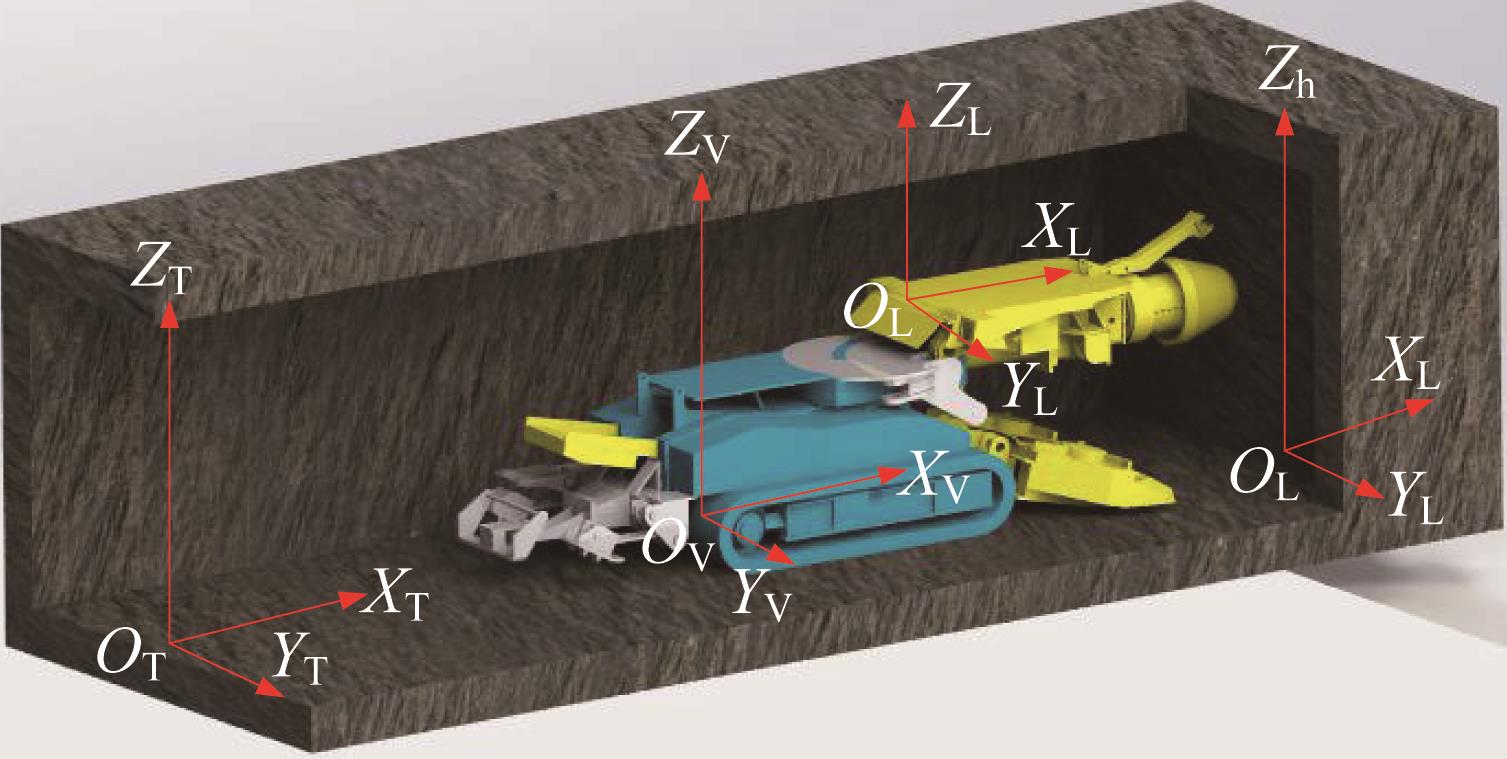
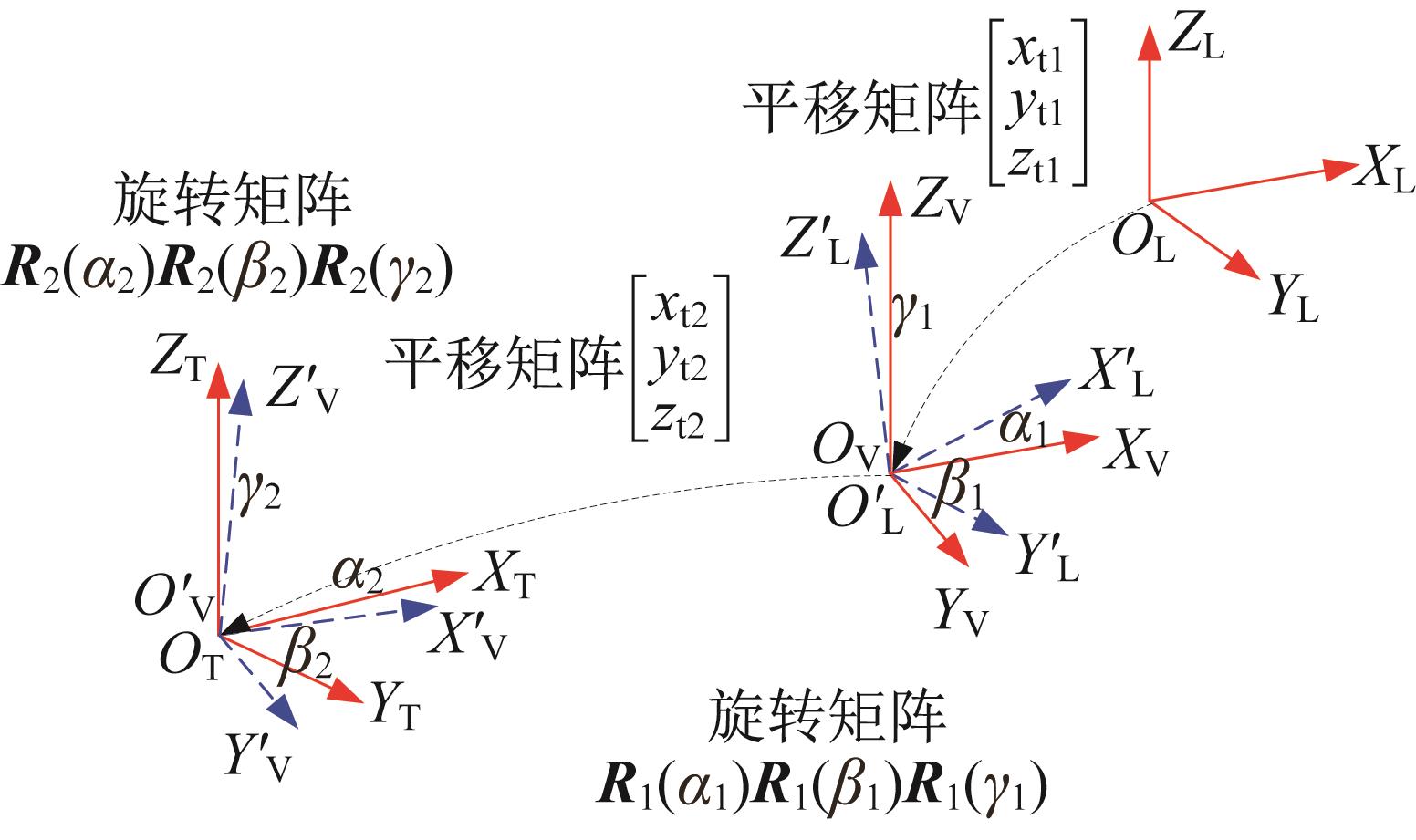
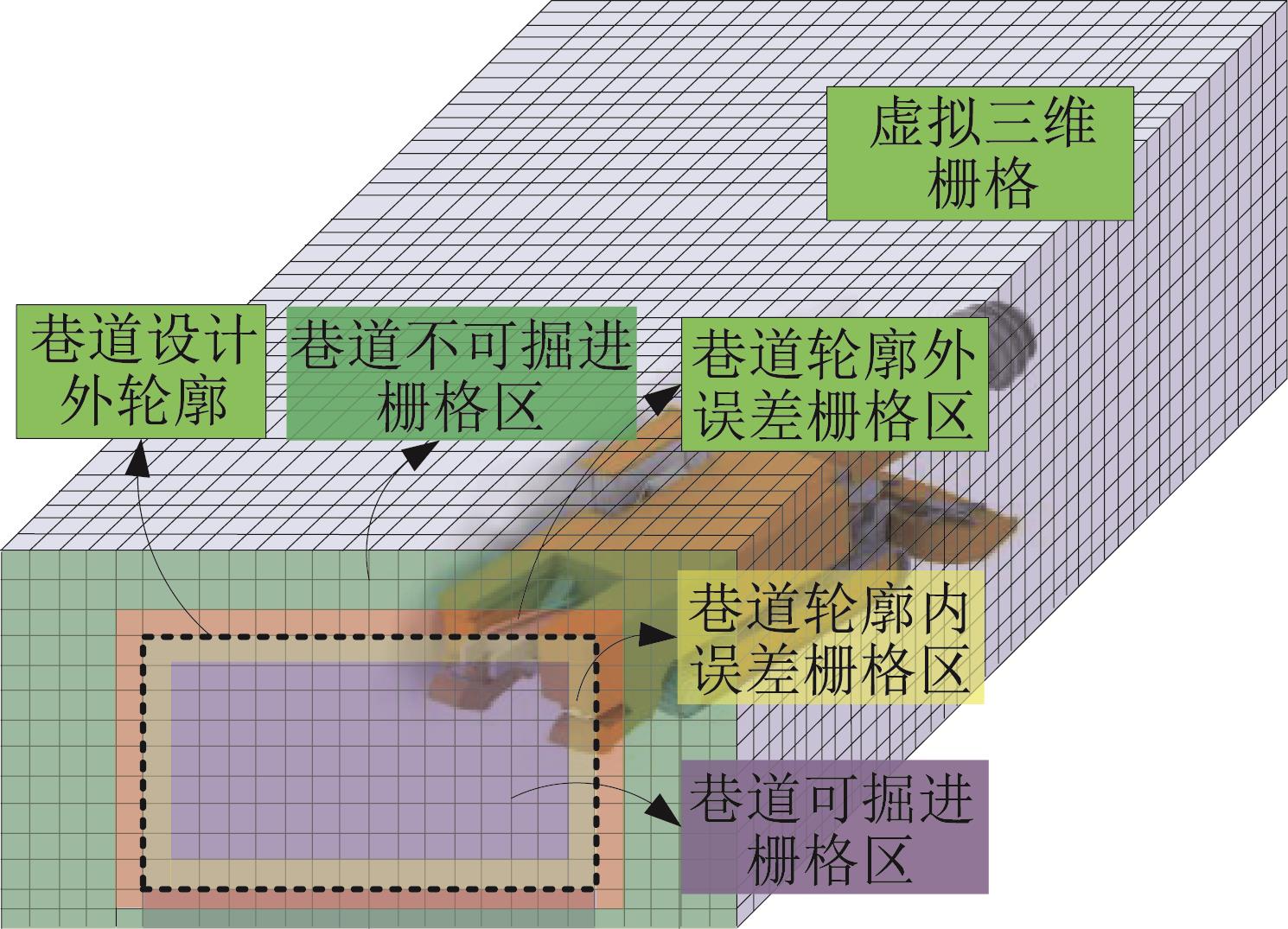
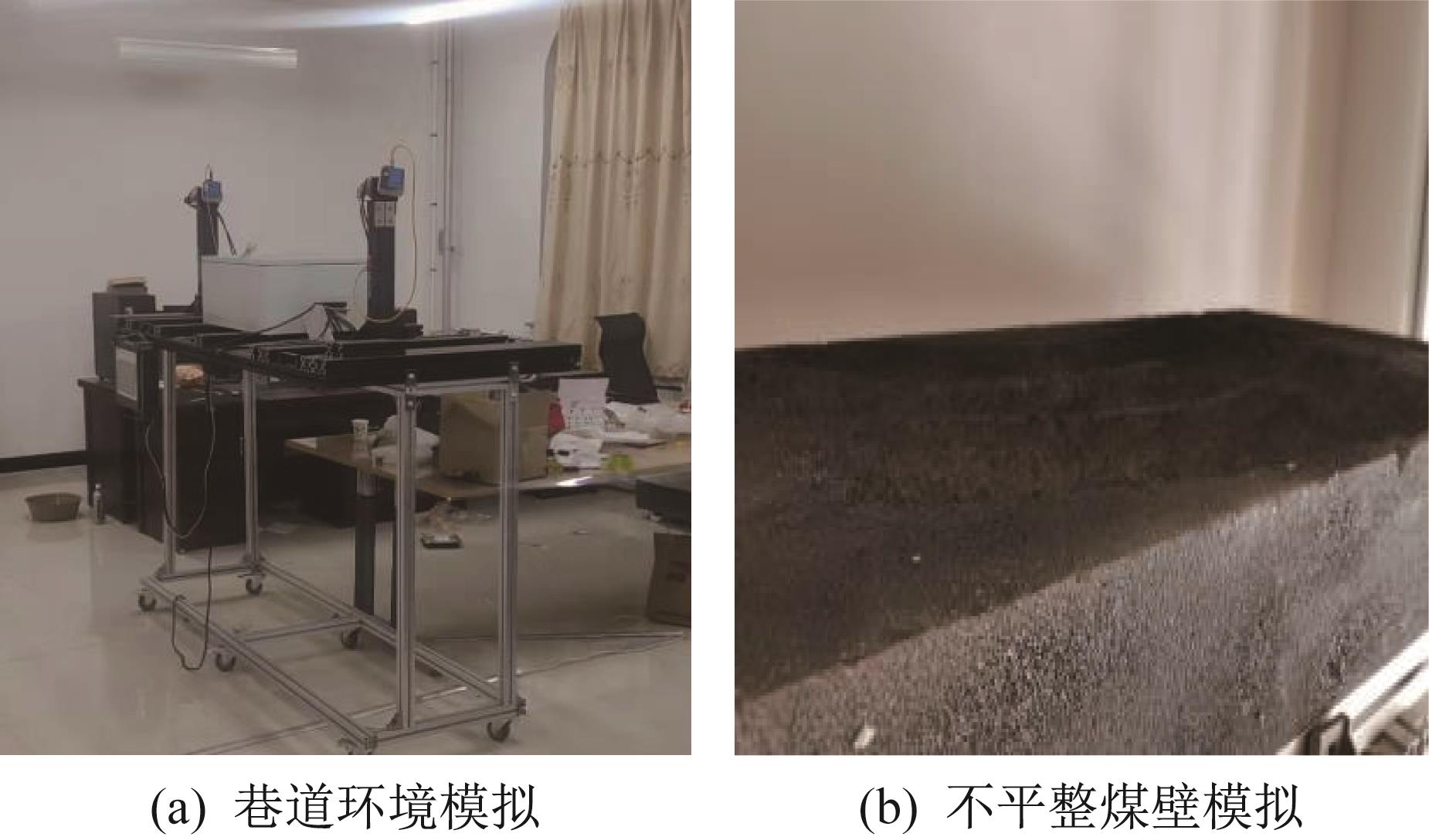
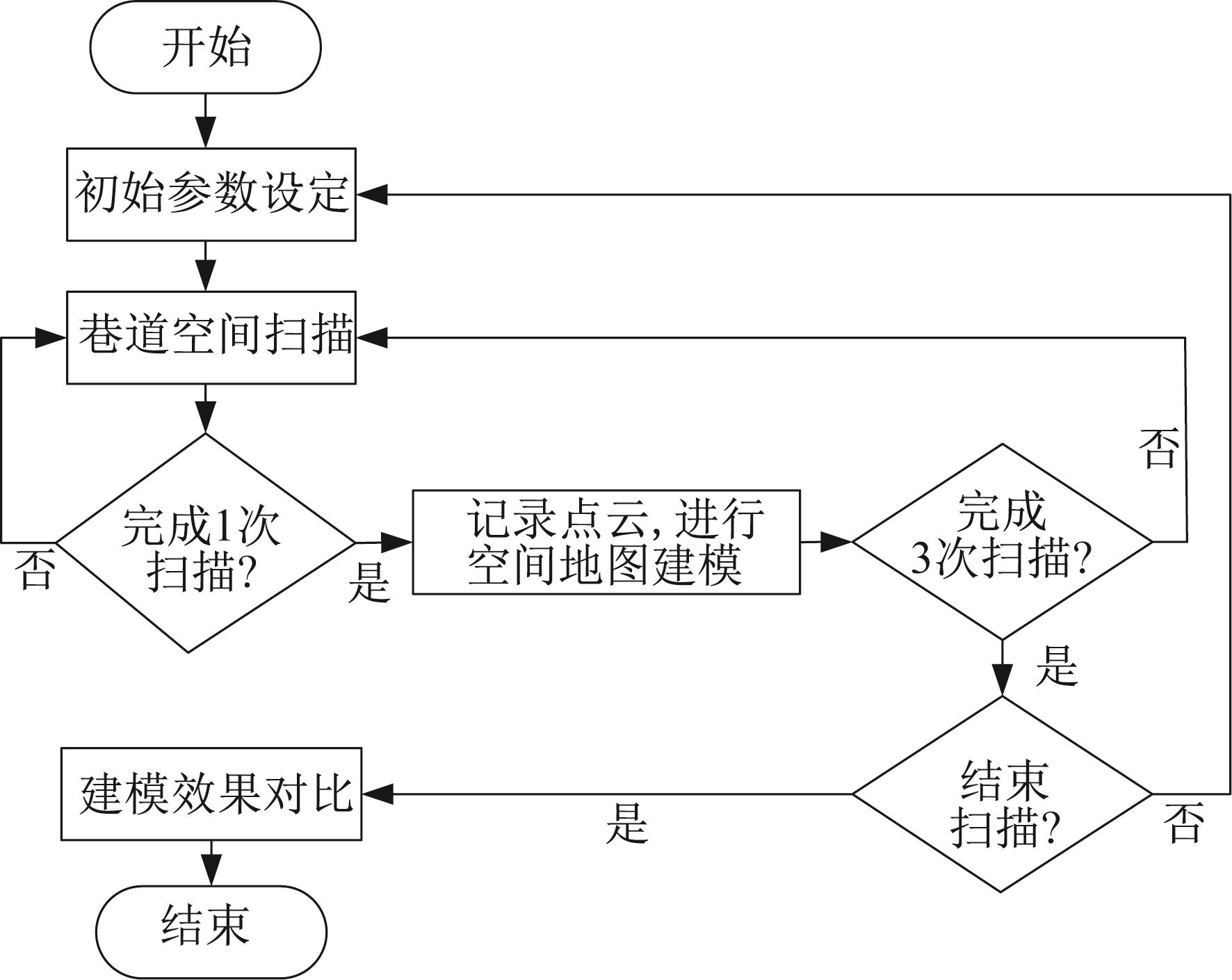
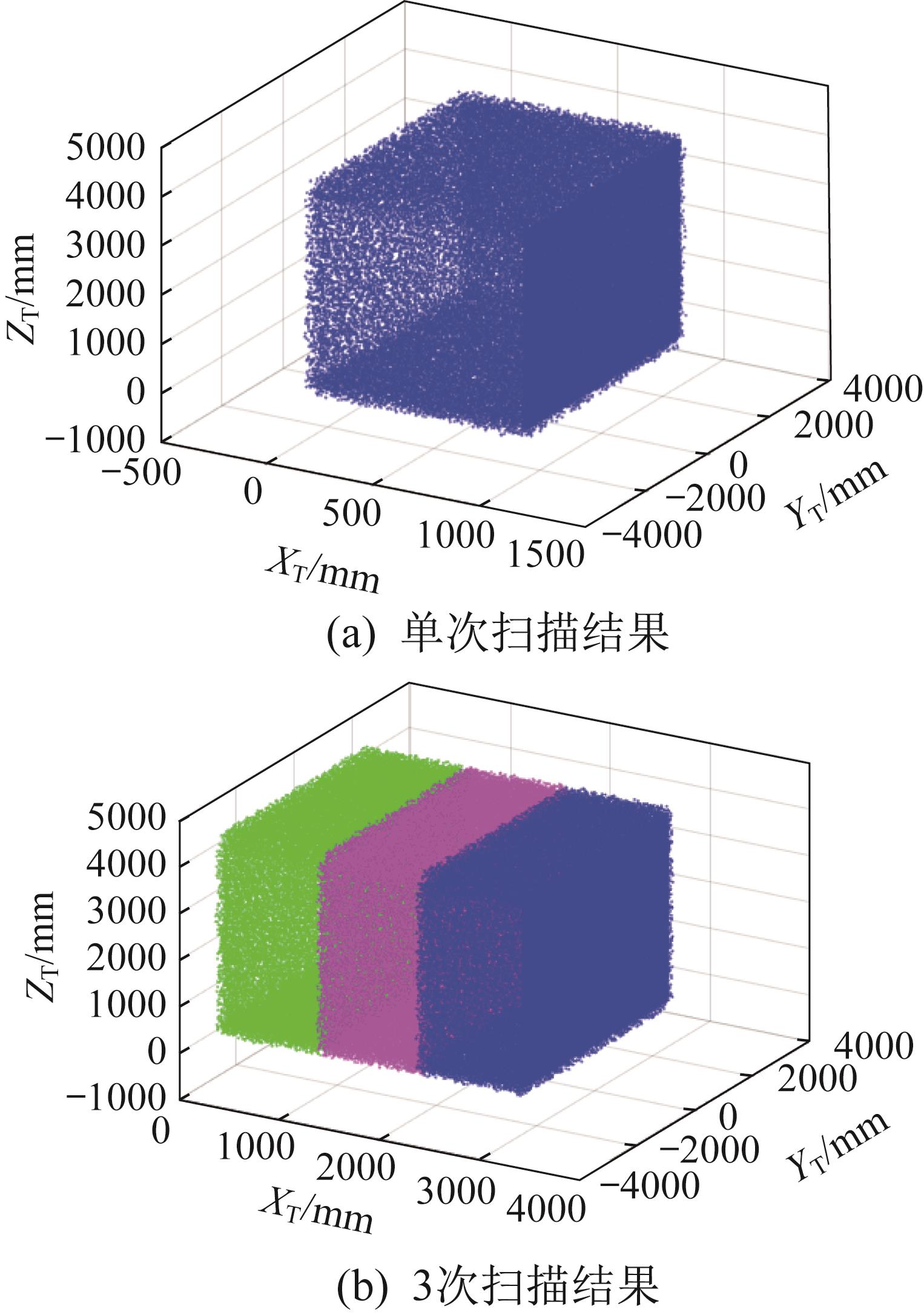
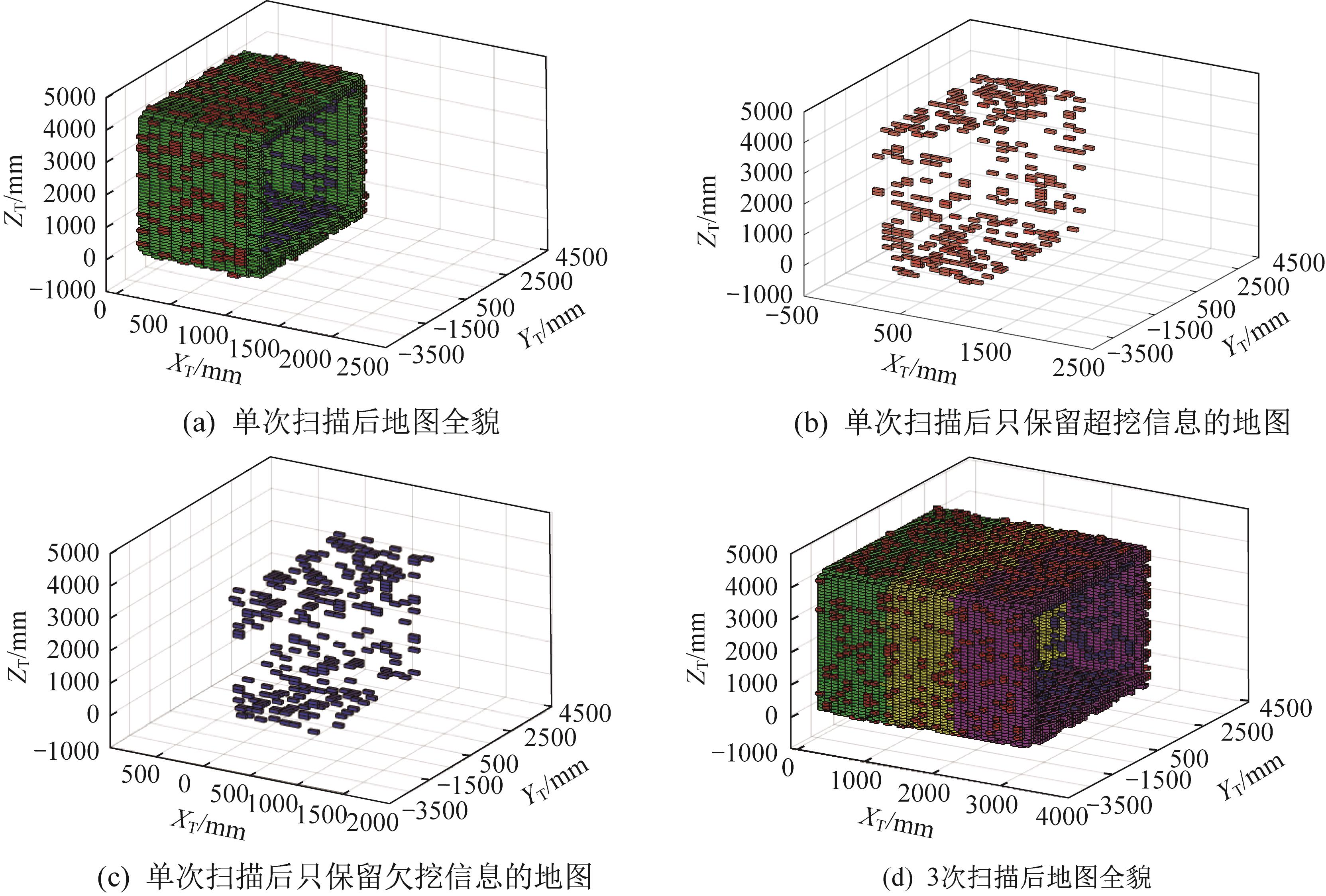
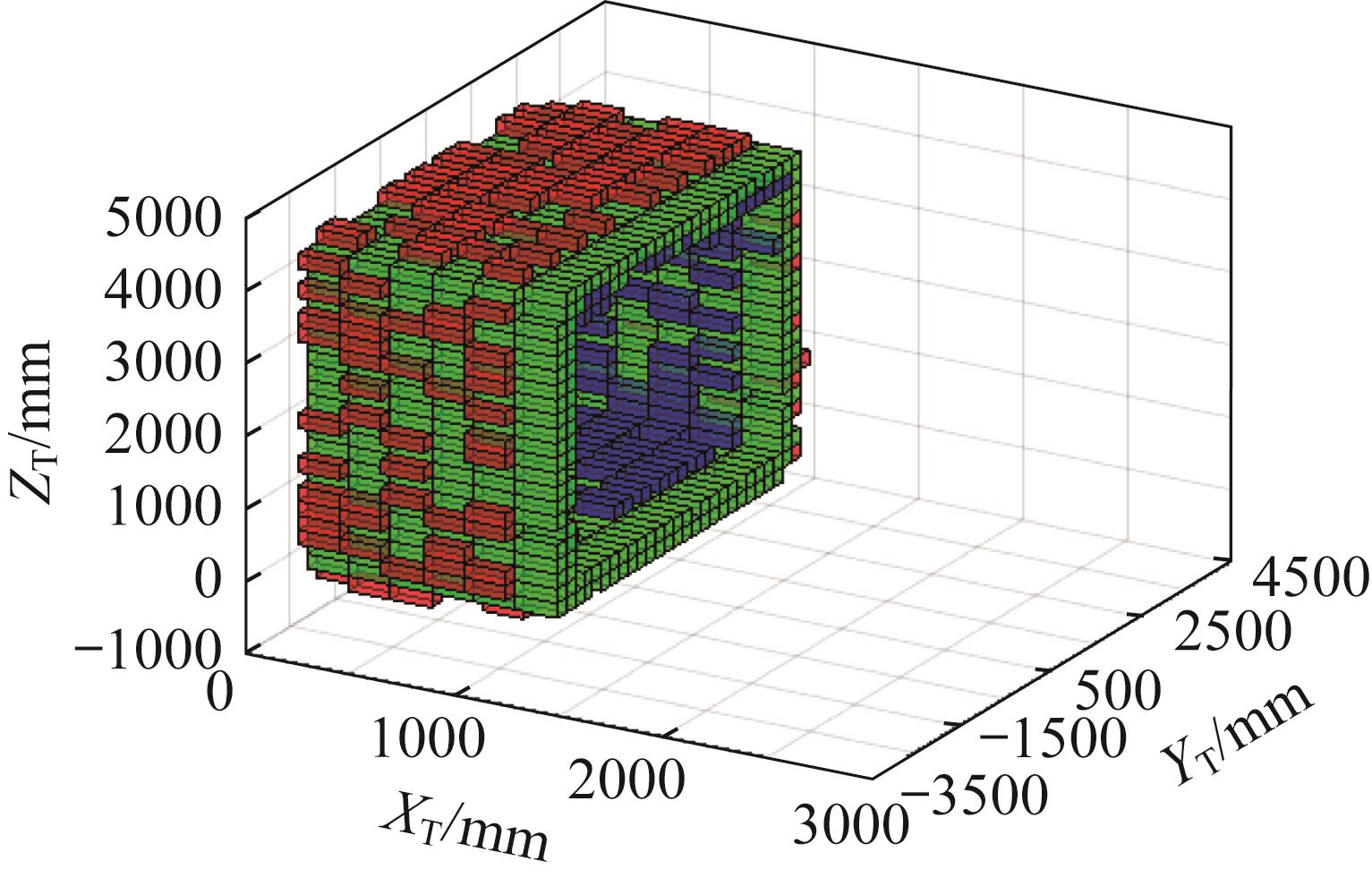
Abstract The point cloud data obtained by conventional 3D point cloud information map modeling method for coal mine tunnels is large and complex, with a large amount of computation. Therefore, a 3D scanning system and a spatial modeling method for excavation tunnel based on laser scanning and 3D grid map were proposed. The 3D grid map of the tunnel space was formed through mapping point cloud data to a 3D grid and dividing the tunnel space into a finite number of grids, and the map was divided into multiple functional areas. By converting the 3D scanning lidar coordinate system to the tunnel coordinate system, the point cloud data obtained by lidar was converted into the outer contour data of the tunnel, in order to analyze the over excavation and under excavation errors of the cutting of the roadheader. The experiment showed that with a 3D grid edge length of 10 cm, when the grid map obtained by the cutting formed tunnel 3D grid map modeling method guided the automatic cutting operation of the roadheader, the data processing load could be reduced by 84.7% compared with the conventional point cloud map, which greatly reduced the burden of the cutting control system processor. The research results provide a basis for the design and application of an autonomous cutting operation system of roadheader based on lidar 3D scanning.
|
|
Received: 13 September 2022
Published: 06 July 2023
|
|
|
|
Corresponding Authors:
Zhixiang LIU
E-mail: 13835843872@139.com;380357369@qq.com
|
基于激光扫描和三维栅格地图的掘进巷道空间建模方法研究
采用常规煤矿巷道三维点云信息地图建模方法得到的点云数据庞大而繁杂,运算量很大,因此提出了基于激光扫描和三维栅格地图的掘进机截割成形三维扫描系统和掘进巷道空间建模方法。将点云数据与三维栅格进行映射,将巷道空间划分为有限个栅格,构成巷道空间三维栅格地图,并将三维栅格地图划分为多个功能区域。通过三维扫描激光雷达坐标系与巷道坐标系的转换,实现了将激光雷达获取的点云数据转换为巷道外轮廓数据,来分析掘进机截割的超挖和欠挖误差。实验表明,当三维栅格边长设定为10 cm时,采用由截割成形巷道三维栅格地图建模方法得到的栅格地图指导掘进机自主截割作业,相比采用常规点云地图可减少84.7%的数据处理量,极大减轻了截割控制系统处理器的负担。研究结果为基于激光雷达三维扫描的掘进机自主截割作业系统的设计及应用提供了依据。
关键词:
掘进机,
激光扫描,
三维栅格,
空间建模,
掘进巷道
|
|
| [6] |
ZHANG X H, CHEN L, MA H W, et al. Virtual simulation and remote control system of mine driving robot[J]. Industrial and Mining Automation, 2016, 42 (12): 78-83.
doi: 10.13272/j.issn.1671-251x.2016.12.017
|
|
|
| [7] |
杜雨馨,刘停,童敏明,等.基于机器视觉的悬臂式掘进机机身位姿检测系统[J].煤炭学报,2016,41(11):2897-2906.
DU Y X, LIU T, TONG M M, et al. Pose measurement system of boom-type roadheader based on machine vision[J]. Journal of China Coal Society, 2016, 41(11): 2897-2906.
|
|
|
| [8] |
符世琛,成龙,陈慎金,等.面向掘进机的超宽带位姿协同检测方法[J].煤炭学报,2018,43(10):2918-2925.
FU S C, CHENG L, CHEN S J, et al. Ultra-wideband pose collaborative detection method of roadheader[J]. Journal of China Coal Society, 2018, 43(10): 2918-2925.
|
|
|
| [9] |
杨林,马宏伟,王岩,等.煤矿巡检机器人同步定位与地图构建方法研究[J].工矿自动化,2019,45(9):18-24.
YANG L, MA H W, WANG Y, et al. Research on method of simultaneous localization and mapping of coal mine inspection robot[J]. Industrial Mining Automation, 2019, 45(9): 18-24.
|
|
|
| [10] |
田慧卿,魏忠义.基于图像识别技术的煤岩识别研究与实现[J]. 西安工程大学学报,2012,26(5):657-660. doi:10.3969/j.issn.1674-649X.2012.05.023
TIAN H Q, WEI Z Y. The research and implementation of coal and rock identification based on image recognition technology[J]. Journal of Xi'an University of Technology, 2012, 26(5): 657-660.
doi: 10.3969/j.issn.1674-649X.2012.05.023
|
|
|
| [11] |
王苏彧,田劼,吴淼.纵轴式掘进机截割轨迹规划及边界控制方法研究[J].煤炭科学技术,2016,44(4):89-94,118.
WANG S Y, TIAN J, WU M. Study on cutting trace planning of longitudinal roadheader and boundary control method[J]. Coal Science and Technology, 2016, 44(4): 89-94, 118.
|
|
|
| [12] |
伍小杰,孙新贺,刘贺,等.悬臂式掘进机远程监控系统设计[J].煤 炭科学技术,2011,39(3):87-90.
|
|
|
| [1] |
胡兴涛,朱涛,苏继敏,等.煤矿巷道智能化掘进感知关键技术[J]. 煤炭学报,2021,46(7):2123-2135. doi:10.13225/j.cnki.jccs.JJ21.0583
HU X T, ZHU T, SU J M, et al. Key technology of intelligent drivage perception in coal mine roadway[J]. Journal of China Coal Society, 2021, 46(7): 2123-2135.
doi: 10.13225/j.cnki.jccs.JJ21.0583
|
|
|
| [12] |
WU X J, SUN X H, LIU H, et al. Design on remote monitoring and control system of boom type mine roadheader[J]. Coal Science and Technology, 2011, 39(3): 87-90.
|
|
|
| [13] |
田劼,王苏彧,穆晶,等.悬臂式掘进机空间位姿的运动学模型与仿真[J].煤炭学报,2015,40(11):2617-2622.
TIAN J, WANG S Y, MU J, et al. Spatial pose kinematics model and simulation of boom-type roadheader[J]. Journal of China Coal Society, 2015, 40(11): 2617-2622.
|
|
|
| [14] |
刘治翔,谢苗,谢春雪,等.截割机构延迟特性对巷道断面成型精度影响分析[J].煤炭学报,2020,45(3):1195-1202.
LIU Z X, XIE M, XIE C X, et al. Effect of delay characteristics of cutting mechanism on forming accuracy of roadway section[J]. Journal of China Coal Society, 2020, 45(3): 1195-1202.
|
|
|
| [15] |
吴廷,侯阳飞,鲍金.基于三维激光点云的隧道中轴线及断面连续提取[J].测绘与空间地理信息,2018,41(11):85-87. doi:10.3969/j.issn.1672-5867.2018.11.024
WU T, HOU Y F, BAO J. Continuous extraction of axis and section in tunnel based on 3D laser point cloud[J]. Geomatics & Spatial Information Technology, 2018, 41(11): 85-87.
doi: 10.3969/j.issn.1672-5867.2018.11.024
|
|
|
| [16] |
韦武化.三维激光扫描技术运用于隧道断面变形测量[J].北京测绘,2020,34(4):561-565.
WEI W H. 3D laser scanning technique is applied to the measurement of tunnel section deformation[J]. Beijing Surveying and Mapping, 2020, 34(4): 561-565.
|
|
|
| [17] |
虞伟家,王勇.基于移动三维激光扫描的盾构隧道监测技术[J].交通科技与经济,2020,22(2):77-80.
YU W J, WANG Y. Shield tunnel monitoring technology based on mobile 3D laser scanning[J]. Technology & Economy in Areas of Communications, 2020, 22(2): 77-80.
|
|
|
| [18] |
万松.煤矿井下三维点云边缘检测及配准研究[D].武汉:华中科技大学,2015:1-10.
WAN S. Research on edge detection and registration of 3D point cloud in coal mine [D]. Wuhan: Huazhong University of Science and Technology, 2015: 1-10.
|
|
|
| [19] |
黄晓阳,栾元重,李雷,等.地面三维激光扫描技术应用于井架整体监测研究[J].测绘地理信息,2012,37(5):56-57.
HUANG X Y, LUAN Y C, LI L, et al. Whole monitoring of headframe using terrestrial 3D laser scanning technology[J]. Journal of Geomatics, 2012, 37(5): 56-57.
|
|
|
| [20] |
陈强,胡士强,罗灵鲲,等.基于地面站辅助的无人机自主架线系统[J].工程设计学报,2022,29(5):634-642. doi:10.3785/j.issn.1006-754X.2022.00.076
CHEN Q, HU S Q, LUO L K, et al. UAV autonomous stringing system based on ground station assistance[J]. Chinese Journal of Engineering Design,2022, 29(5): 634-642.
doi: 10.3785/j.issn.1006-754X.2022.00.076
|
|
|
| [2] |
张旭辉,杨文娟,薛旭升,等.煤矿远程智能掘进面临的挑战与研究进展[J].煤炭学报,2022,47 (1):579-597.
ZHANG X H, YANG W J, XUE X S, et al. Challenges and developing of the intelligent remote control on roadheaders in coal mine[J]. Journal of China Coal Society, 2022, 47(1): 579-597.
|
|
|
| [3] |
毛君,董钰峰,卢进南,等.巷道掘进截割钻进先进技术研究现状及展望[J].煤炭学报,2021,46(7):2084-2099. doi:10.13225/j.cnki.jccs.JJ21.0887
MAO J, DONG Y F, LU J N, et al. Research status and prospect of advanced technology of roadway excavation cutting and drilling equipment[J]. Journal of China Coal Society, 2021, 46(7): 2084-2099.
doi: 10.13225/j.cnki.jccs.JJ21.0887
|
|
|
| [4] |
刘志忠.突出软煤巷道掘进装备机器人化机构设计与分析研究[D].沈阳:东北大学,2015:1-2.
LIU Z Z. Design and analysis of robotic mechanism of outburst soft coal roadway driving equipment[D]. Shenyang: Northeastern University, 2015: 1-2.
|
|
|
| [5] |
毛清华,陈磊,闫昱州,等.煤矿悬臂式掘进机截割头位置精确控制方法[J].煤炭学报,2017,42(S2):562-567.
MAO Q H, CHEN L, YAN Y Z, et al. Precise control method for cutting head position of coal mine cantilever roadheader[J]. Journal of China Coal Society, 2017, 42 (S2): 562-567.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|