| Robotic and Mechanism Design |
|


|
|
|
| Design and experimental study of soft crawling robots based on anisotropic friction |
Jintao XU( ),Jinhu CAI,Lingling TANG,Long HUANG() ),Jinhu CAI,Lingling TANG,Long HUANG() |
| College of Mechanical and Vehicle Engineering, Changsha University of Science and Technology, Changsha 410114, China |
|
|
|
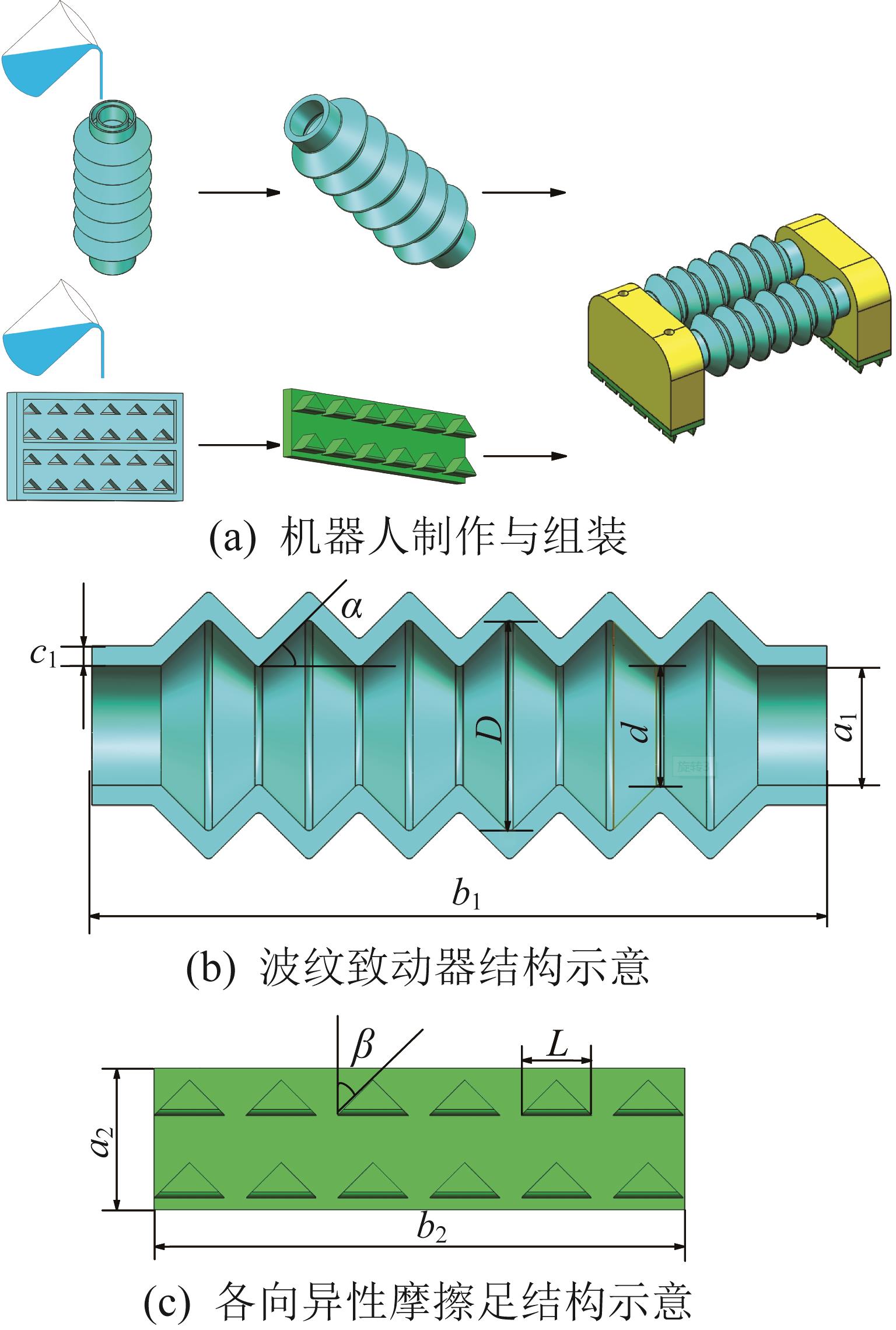
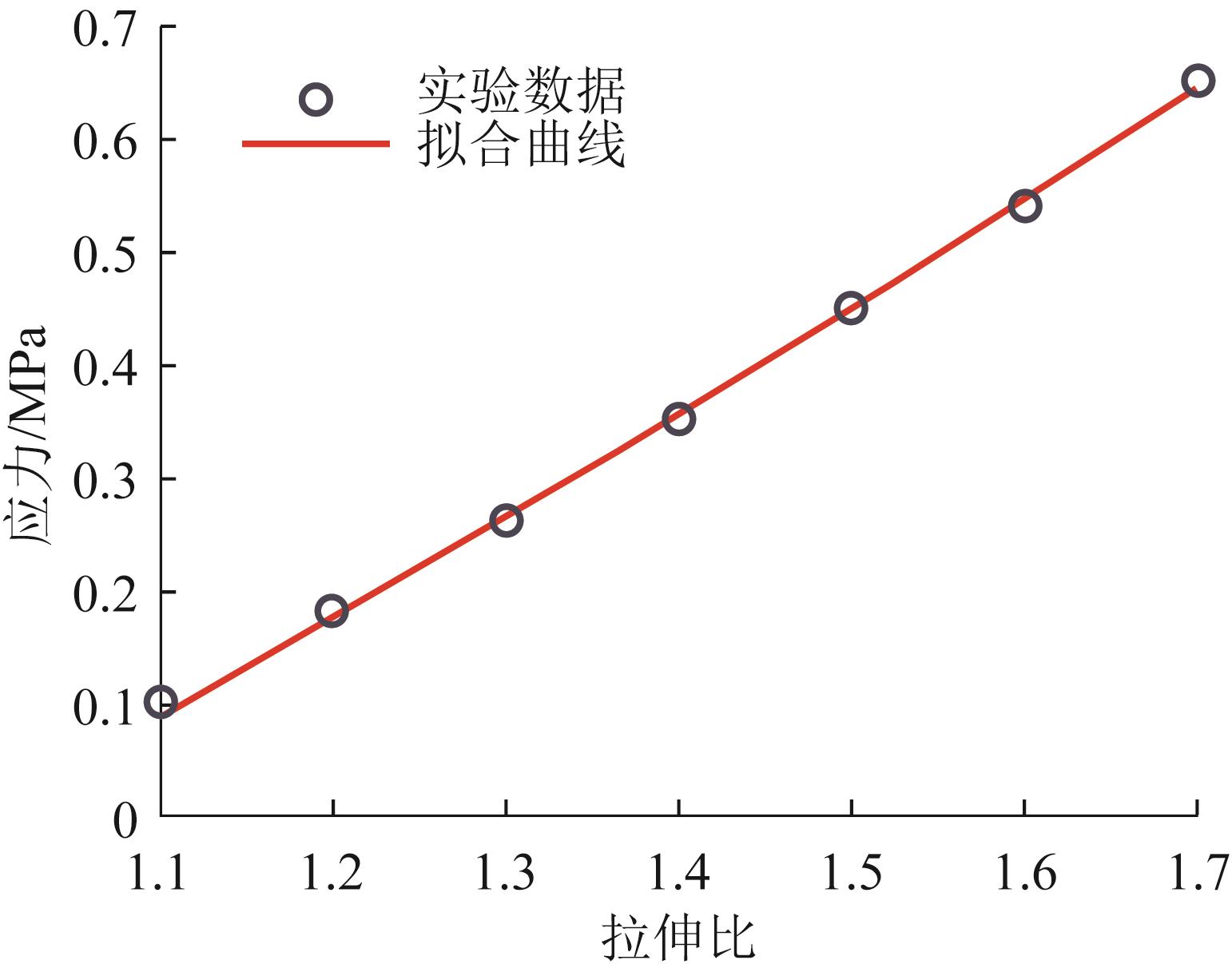
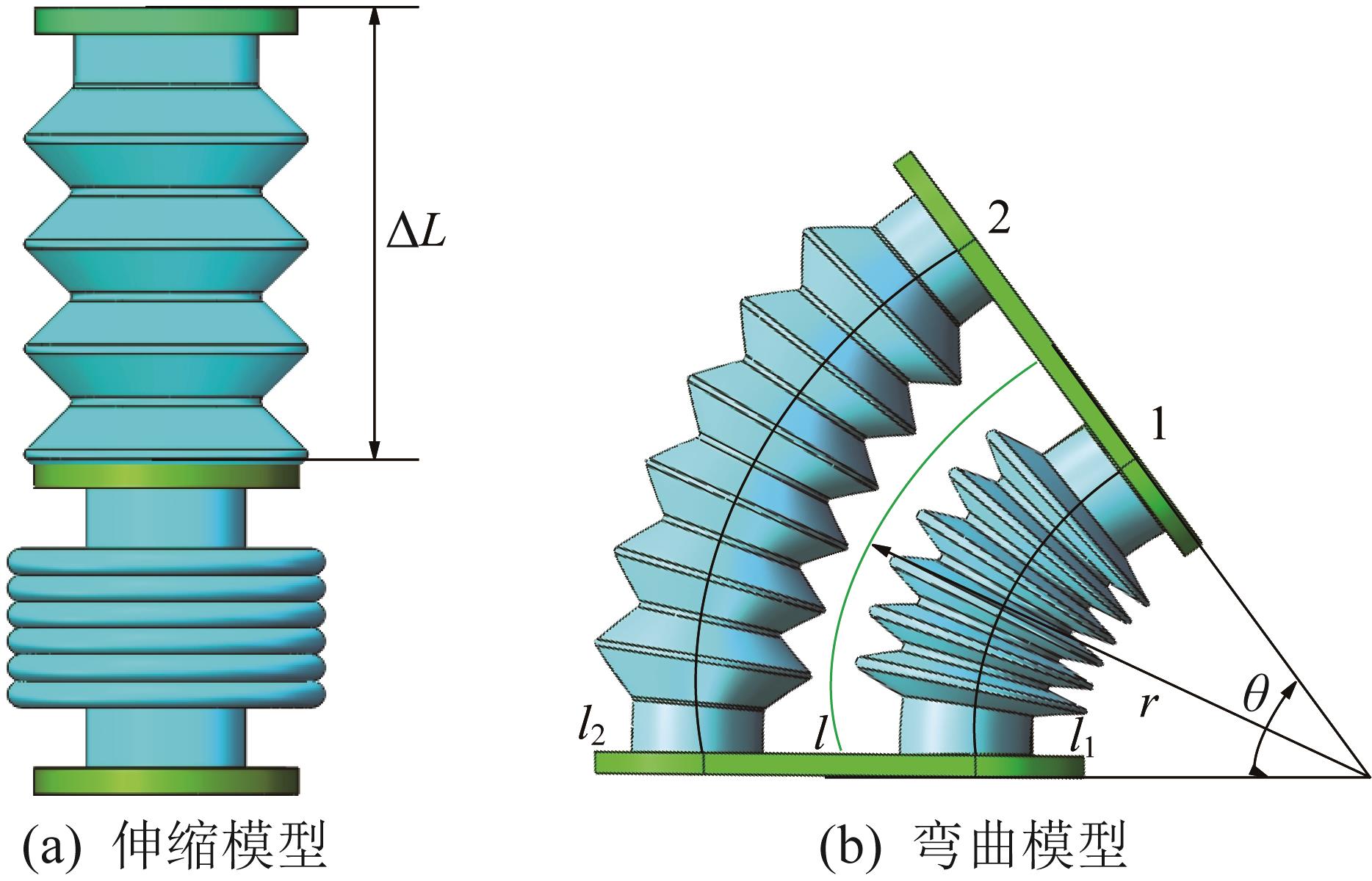
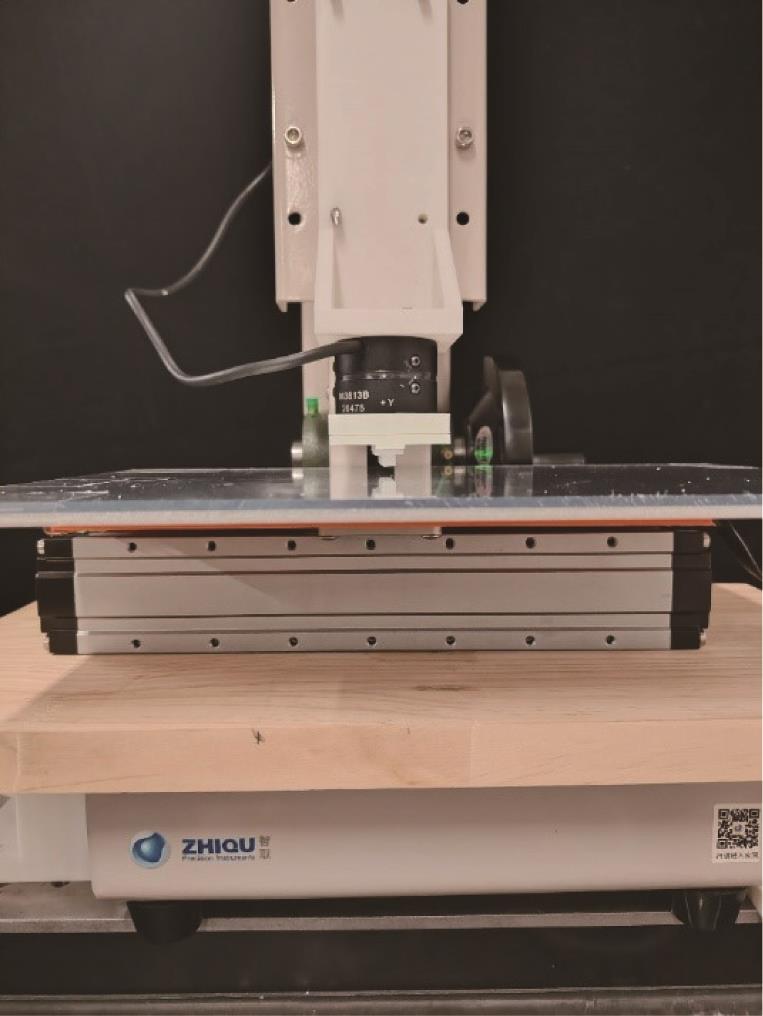
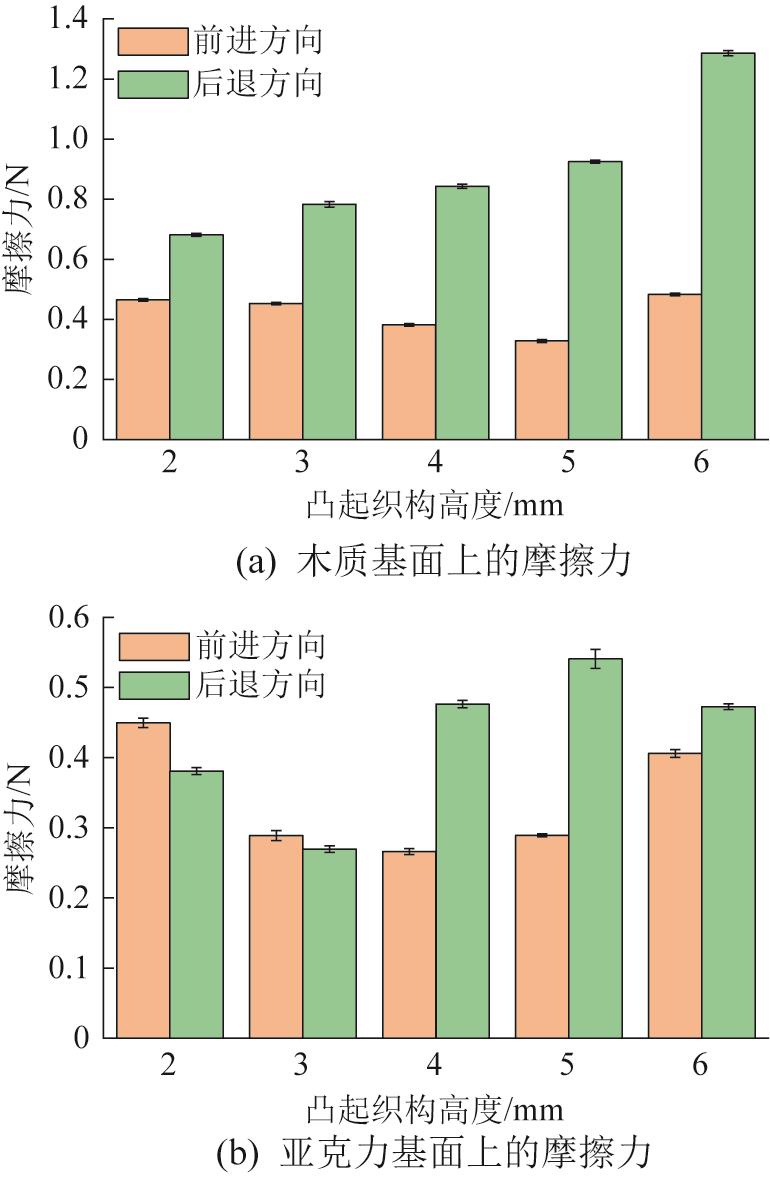
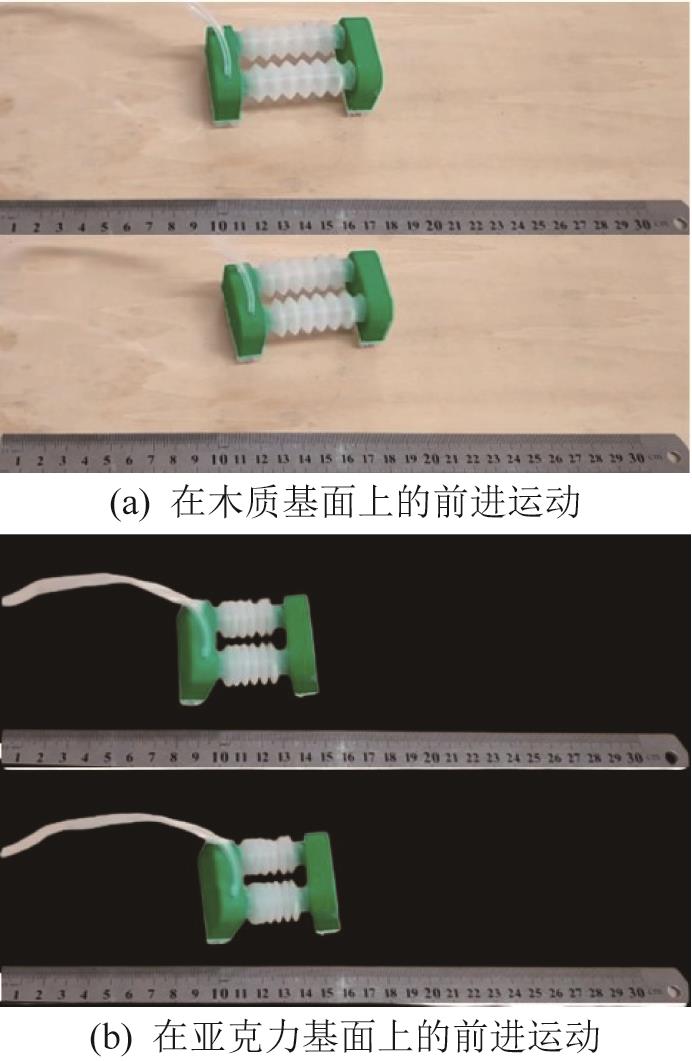
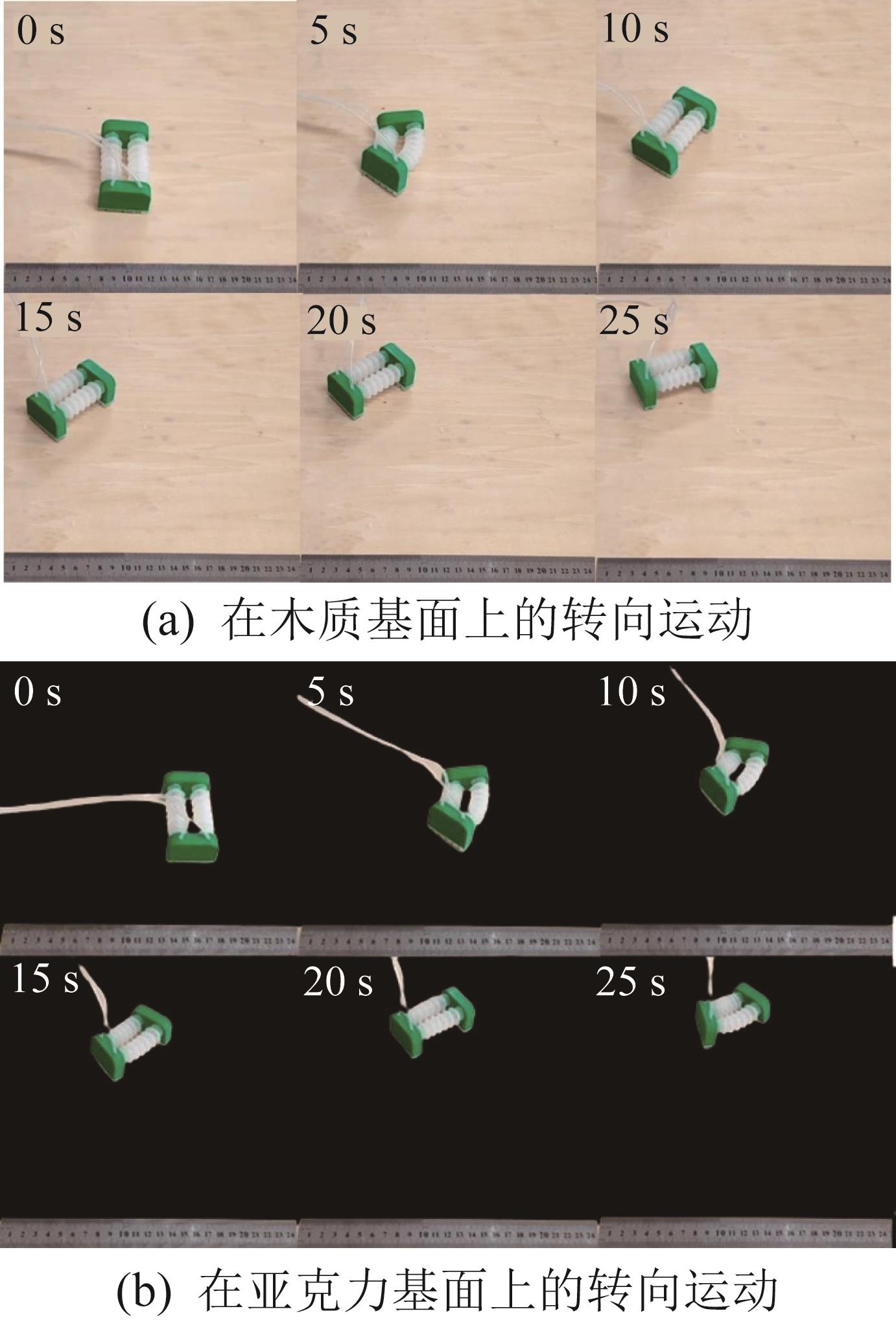
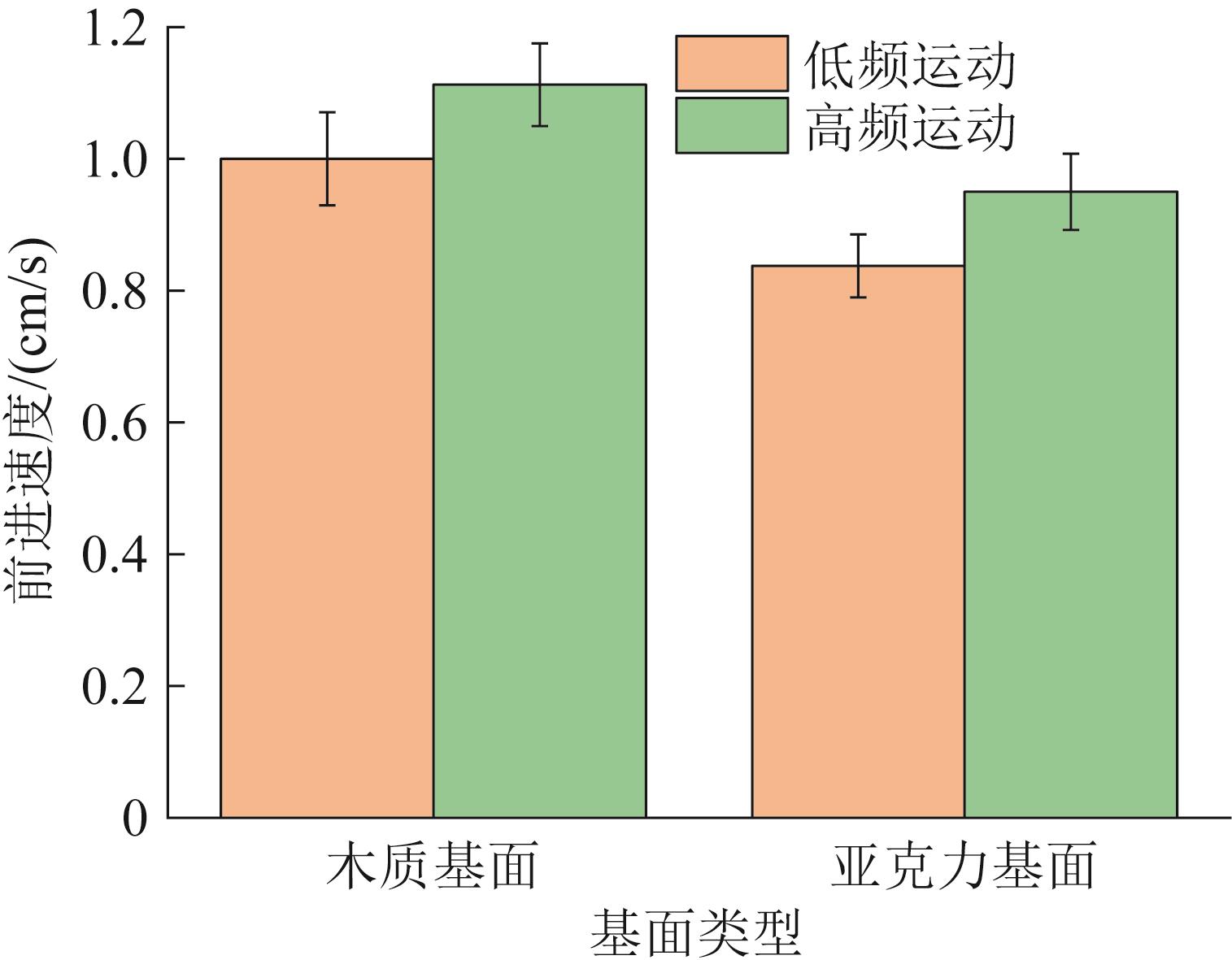
Abstract Aiming at the problems of poor motion adaptability and low friction-driven efficiency of soft crawling robots in diverse surface environments, a triangular surface texture design scheme with anisotropic friction characteristics is proposed. Based on the principle of inchworm movement, the triangular surface texture design is applied to the friction foot of the soft crawling robot and integrated with the pneumatic corrugated actuator to achieve multiple movement modes of the robot on different surfaces. Firstly, based on the assumption of constant curvature, the relationship between the elastic deformation and the pressure of the corrugated actuator was analyzed, and its kinematics model was established. Then, a friction force testing experimental platform was built to measure the anisotropic friction performance of the friction foot on the contact surfaces of different roughness. Finally, experiments on the forward and turning movements of the robot were carried out to test its motion performance on substrate surfaces with different roughness. Through kinematics experiments, the correctness of the kinematics model of the corrugated actuator was verified. Through experiments, it was measured that on the wooden substrate surface, the forward speed of the robot could reach 1.11 cm/s; on the acrylic substrate surface, the forward speed of the robot could reach 0.95 cm/s. In the turning motion experiment, the turning speed of the robot on the wooden and acrylic substrate surfaces could reach 3.48 (°)/s and 3.08 (°)/s, respectively. The results showed that the triangular surface texture design could effectively achieve anisotropic friction performance, and this friction performance increased first and then decreased with the increase of texture height. The triangular surface texture design can significantly enhance the motion performance of soft crawling robots on different substrate surfaces and has certain practical value.
|
|
Received: 03 April 2025
Published: 30 December 2025
|
|
|
|
Corresponding Authors:
Long HUANG
E-mail: xujintao2022@163.com;huanglongin@foxmail.com
|
基于各向异性摩擦的软体爬行机器人设计与实验研究
针对软体爬行机器人在多样化表面环境下运动适应性差、摩擦驱动效率低的问题,提出了一种具有各向异性摩擦特性的三角形表面织构设计方案。根据尺蠖的运动原理,将三角形表面织构设计应用于软体爬行机器人的摩擦足,并与气动波纹致动器集成,以实现机器人在不同表面上的多种运动模式。首先,基于常曲率假设分析波纹致动器的弹性变形与压强的关系,并建立了其运动学模型。然后,搭建摩擦力测试实验平台,测量得出摩擦足在不同粗糙度接触基面上的各向异性摩擦性能。最后,开展机器人的前进运动与转向运动实验,以测试机器人在不同粗糙度基材表面上的运动性能。通过运动学实验验证了波纹致动器运动学模型的正确性。通过实验测得:在木质基面上,机器人的前进速度可达1.11 cm/s;在亚克力基面上,机器人的前进速度可达0.95 cm/s;在转向运动实验中,机器人在木质基面上的转向速度可达3.48 (°)/s,在亚克力基面上的转向速度可达3.08 (°)/s。结果表明,三角形表面织构设计能够有效实现各向异性摩擦性能,且摩擦性能随织构高度的增大呈现先提升后下降的趋势。三角形表面织构设计可显著提升软体爬行机器人在不同基材表面上的运动性能,具有一定的实用价值。
关键词:
软体爬行机器人,
波纹致动器,
运动学模型,
三角形表面织构设计,
各向异性摩擦
|
|
| [[1]] |
尹顺禹, 许艺, 岑诺, 等. 软体智能机器人的系统设计与力学建模[J]. 力学进展, 2020, 50: 195-220.
YIN S Y, XU Y, CEN N, et al. System design and mechanical modeling of soft smart robots[J]. Advances in Mechanics, 2020, 50: 195-220.
|
|
|
| [[2]] |
GUO H S, RUOKO T P, ZENG H, et al. Hydrogen-bonded liquid crystal elastomers combining shape memory programming and reversible actuation[J]. Advanced Functional Materials, 2024, 34(10): 2312068.
|
|
|
| [[3]] |
DUHR P, MEIER Y A, DAMANPACK A, et al. Kirigami makes a soft magnetic sheet crawl[J]. Advanced Science, 2023, 10(25): 2370170.
|
|
|
| [[4]] |
TA T D, UMEDACHI T, KAWAHARA Y. Design of frictional 2D-anisotropy surface for wriggle locomotion of printable soft-bodied robots[C]//2018 IEEE International Conference on Robotics and Automation. Brisbane, QLD, May 21-25, 2018.
|
|
|
| [[5]] |
姬忠莹, 闫昌友, 张晓琴, 等. 仿生取向结构表界面及其摩擦各向异性研究进展[J]. 表面技术, 2018, 47(6): 112-121.
JI Z Y, YAN C Y, ZHANG X Q, et al. Research advances in biomimetic surfaces with oriented structures and its frictional anisotropy[J]. Surface Technology, 2018, 47(6): 112-121.
|
|
|
| [[6]] |
BAFEKRPOUR E, DYSKIN A, PASTERNAK E, et al. Internally architectured materials with directionally asymmetric friction[J]. Scientific Reports, 2015, 5: 10732.
|
|
|
| [[7]] |
WANG S, LI M, HUANG W, et al. Sticking/climbing ability and morphology studies of the toe pads of Chinese fire belly newt[J]. Journal of Bionic Engineering, 2016, 13(1): 115-123.
|
|
|
| [[8]] |
FU Y F, YUAN C Q, BAI X Q. Marine drag reduction of shark skin inspired riblet surfaces[J]. Biosurface and Biotribology, 2017, 3(1): 11-24.
|
|
|
| [[9]] |
BOHN H F, FEDERLE W. Insect aquaplaning: Nepenthes pitcher plants capture prey with the peristome, a fully wettable water-lubricated anisotropic surface[J]. Proceedings of the National Academy of Sciences of the United States of America, 2004, 101(39): 14138-14143.
|
|
|
| [[10]] |
FILIPPOV A E, GORB S N. Anisotropic friction in biological systems[M]//Combined Discrete and Continual Approaches in Biological Modelling. Cham: Springer International Publishing, 2020: 143-175.
|
|
|
| [[11]] |
KAPPL M, KAVEH F, BARNES W J P. Nanoscale friction and adhesion of tree frog toe pads[J]. Bioinspiration & Biomimetics, 2016, 11(3): 035003.
|
|
|
| [[12]] |
SAHLI R, PALLARES G, DUCOTTET C, et al. Evolution of real contact area under shear and the value of static friction of soft materials[J]. Proceedings of the National Academy of Sciences of the United States of America, 2018, 115(3): 471-476.
|
|
|
| [[13]] |
LIANG X M, XING Y Z, LI L T, et al. An experimental study on the relation between friction force and real contact area[J]. Scientific Reports, 2021, 11(1): 20366.
|
|
|
| [[14]] |
LENGIEWICZ J, DE SOUZA M, LAHMAR M A, et al. Finite deformations govern the anisotropic shear-induced area reduction of soft elastic contacts[J]. Journal of the Mechanics and Physics of Solids, 2020, 143: 104056.
|
|
|
| [[15]] |
XUE L J, ITURRI J, KAPPL M, et al. Bioinspired orientation-dependent friction[J]. Langmuir, 2014, 30(37): 11175-11182.
|
|
|
| [[16]] |
WANG W, LEE J Y, RODRIGUE H, et al. Locomotion of inchworm-inspired robot made of smart soft composite (SSC)[J]. Bioinspiration & Biomimetics, 2014, 9(4): 046006.
|
|
|
| [[17]] |
尹宏飞, 吕跃东, 范旭, 等. 仿尺蠖软体爬行机器人的设计与分析[J]. 机器人技术与应用, 2024(4): 37-42.
YIN H F, LÜ Y D, FAN X, et al. Design and analysis of inchworm-like software crawling robot[J]. Robot Technique and Application, 2024(4): 37-42.
|
|
|
| [[18]] |
NOJIRI S, MIZUSHIMA K, SUZUKI Y, et al. Development of contact area variable surface for manipulation requiring sliding[C]//2019 2nd IEEE International Conference on Soft Robotics. Seoul, Apr. 14-18, 2019.
|
|
|
| [[19]] |
ZHAO J H, JI K J, TU C W, et al. Insect-inspired design strategy for flexible attachments with strong frictional force and weak pull-off force[J]. Tribology International, 2023, 189: 108973.
|
|
|
| [[20]] |
梁威, 唐术锋. 软体仿尺蠖机器人综述与研制[J]. 机械设计与研究, 2020, 36(5): 29-32.
LIANG W, TANG S F. Overview and research of software inching robot[J]. Machine Design & Research, 2020, 36(5): 29-32.
|
|
|
| [[21]] |
熊健, 王彦斌, 吕阳, 等. 环氧树脂-水凝胶软硬复合表界面各向异性摩擦研究[J]. 摩擦学学报(中英文), 2024, 44(3): 335-344.
XIONG J, WANG Y B, LÜ Y, et al. Anisotropic friction of epoxy-bydrogel based surfaces with soft-hard combination[J]. Tribology, 2024, 44(3): 335-344.
|
|
|
| [[22]] |
POPOV V L. 接触力学与摩擦学的原理及其应用[M]. 2版. 李强, 雒建斌, 译. 北京: 清华大学出版社, 2019.
POPOV V L. Contact mechanics and friction: physical principles and applications[M]. 2nd ed. Translated by LI Q, LUO J B. Beijing: Tsinghua University Press, 2019.
|
|
|
| [[23]] |
霍前俊, 刘胜, 张远飞, 等. 3腔道仿生软体爬行机器人设计[J]. 轻工机械, 2021, 39(4): 26-30.
HUO Q J, LIU S, ZHANG Y F, et al. Research of three-cavity bionic soft crawling robot[J]. Light Industry Machinery, 2021, 39(4): 26-30.
|
|
|
| [[24]] |
张林贝子, 苏韩飞, 梁小流, 等. 一种多运动模式的软体爬行机器人[J]. 广西大学学报(自然科学版), 2024, 49(1): 88-96.
ZHANG L B Z, SU H F, LIANG X L, et al. A soft crawling robot with multi-motion modes[J]. Journal of Guangxi University (Natural Science Edition), 2024, 49(1): 88-96.
|
|
|
| [[25]] |
渠涛, 柳荣, 董弋锋, 等. 飞机舱门橡胶密封件动摩擦性能实验研究[J]. 工程力学, 2020, 37(7): 247-256.
QU T, LIU R, DONG Y F, et al. Experimental study on dynamic friction performances of rubber seals for aircraft doors[J]. Engineering Mechanics, 2020, 37(7): 247-256.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|