| Robotic and Mechanism Design |
|


|
|
|
| Design and experimental study of end-effector for picking clustered crabapple |
Sanping LI1( ),Qiyu WANG1,Liguo WU2(),Longqiang YUAN1,Jiamei QI1,Tengjia SUN1 ),Qiyu WANG1,Liguo WU2(),Longqiang YUAN1,Jiamei QI1,Tengjia SUN1 |
1.School of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China
2.Harbin Forestry Machinery Research Institute, National Forestry and Grassland Administration, Harbin 150086, China |
|
|
|
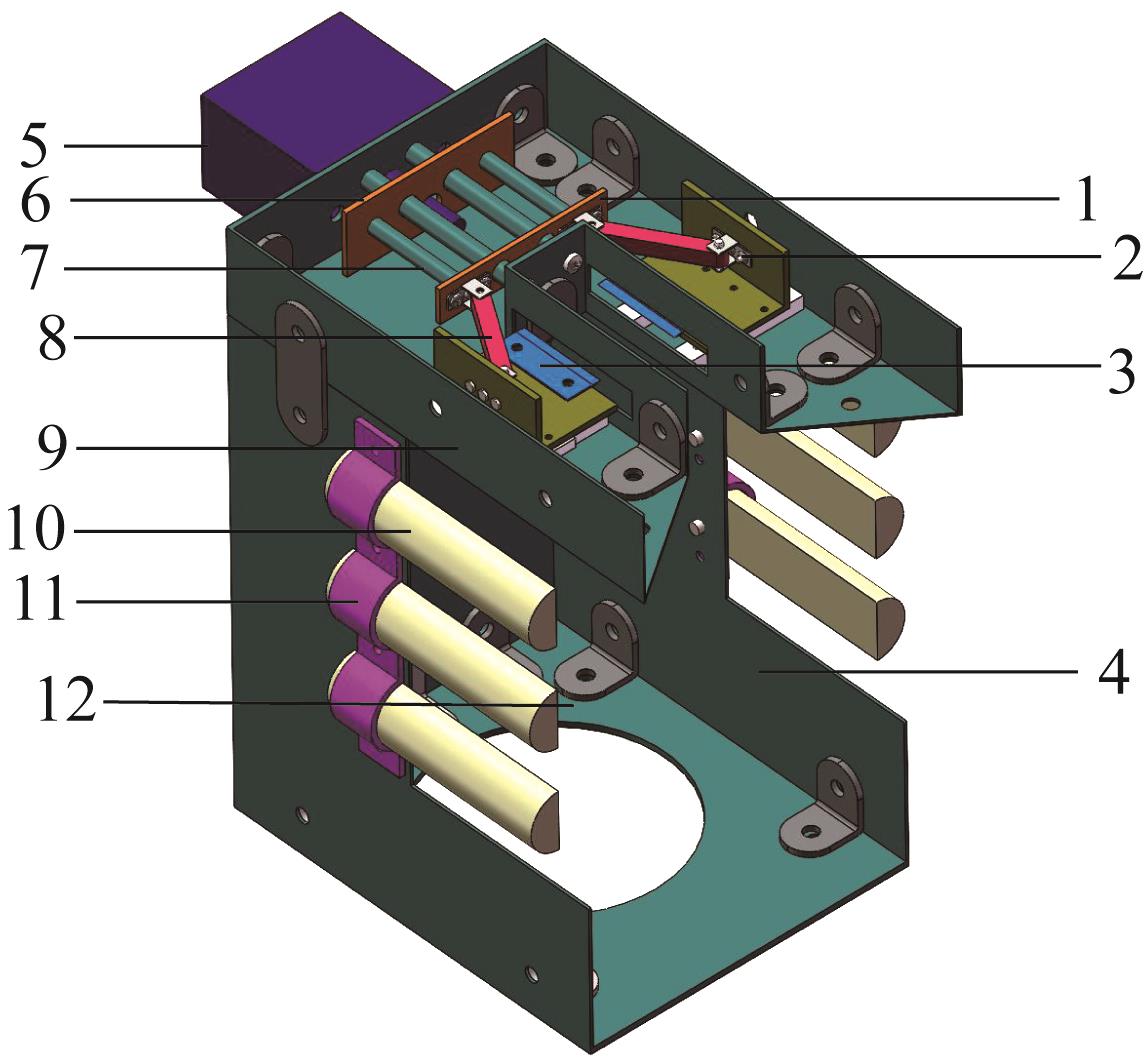
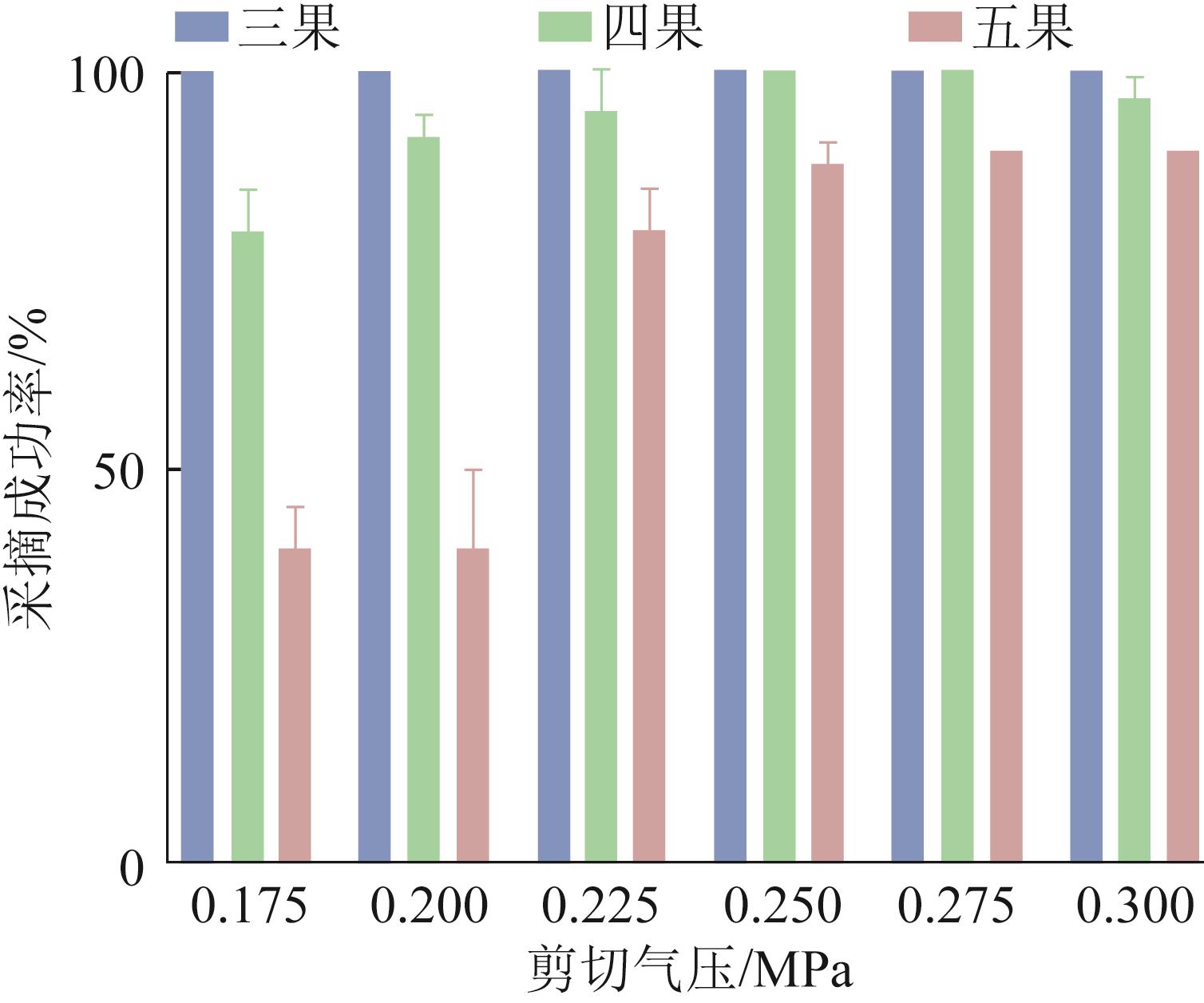
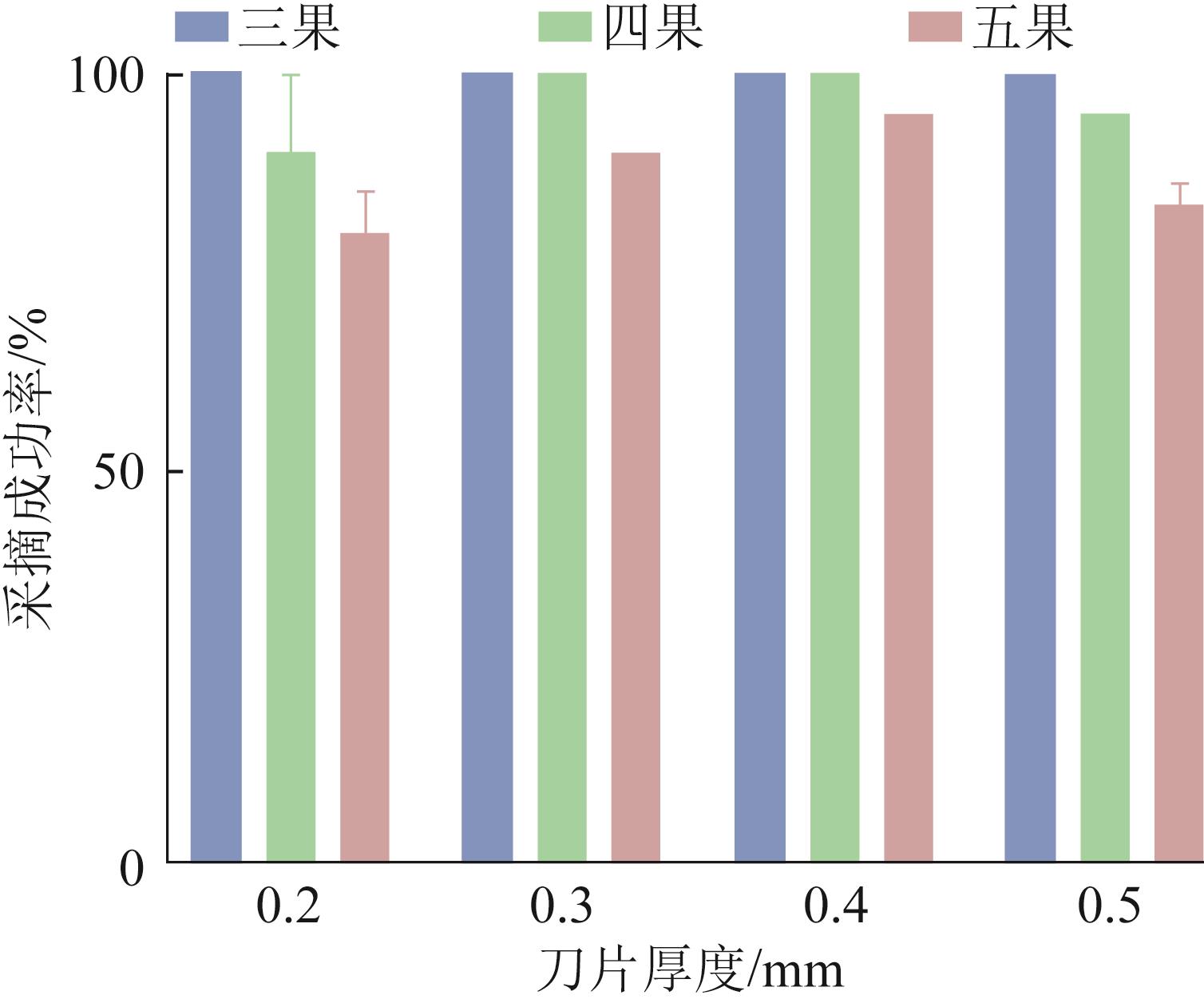
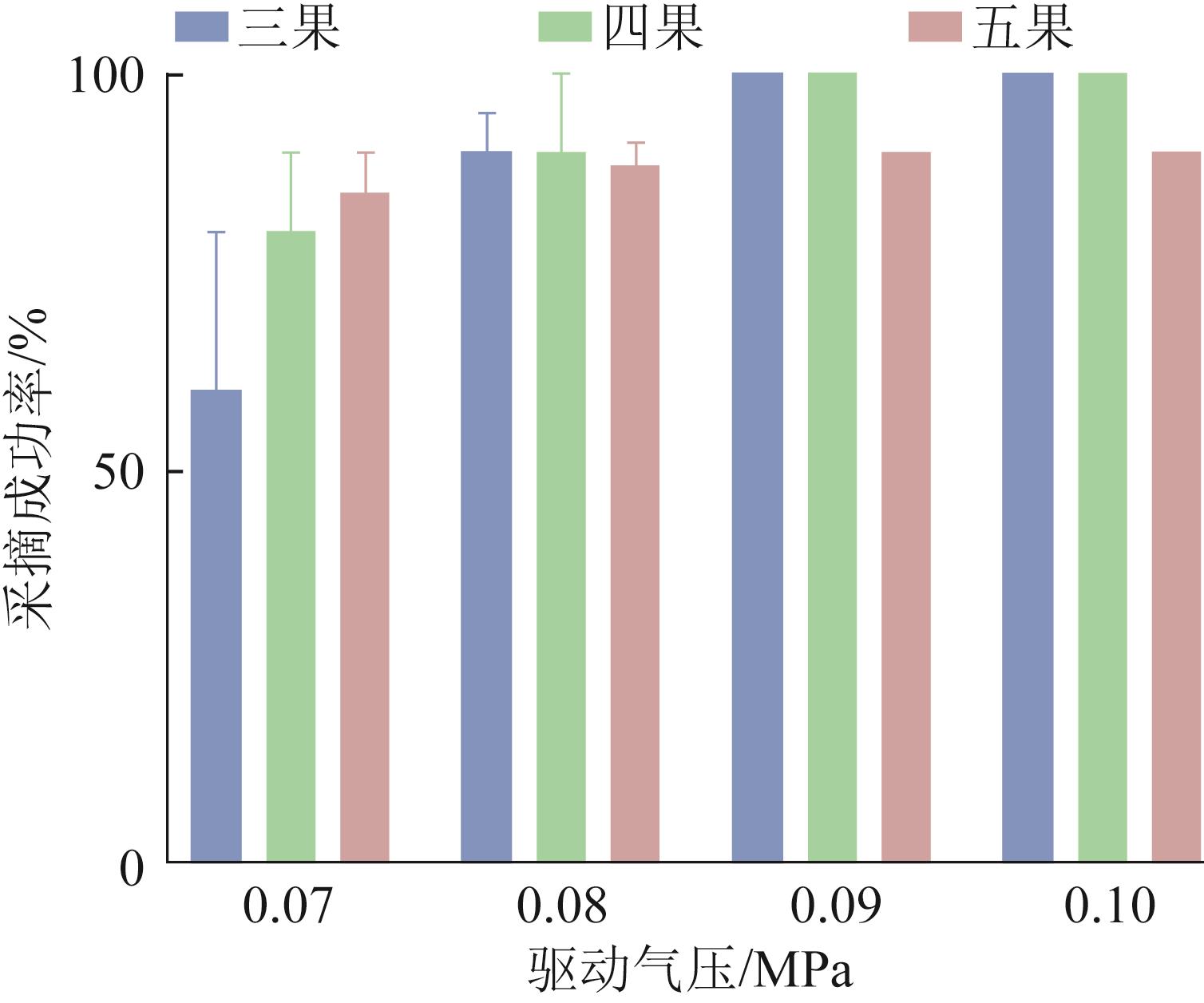
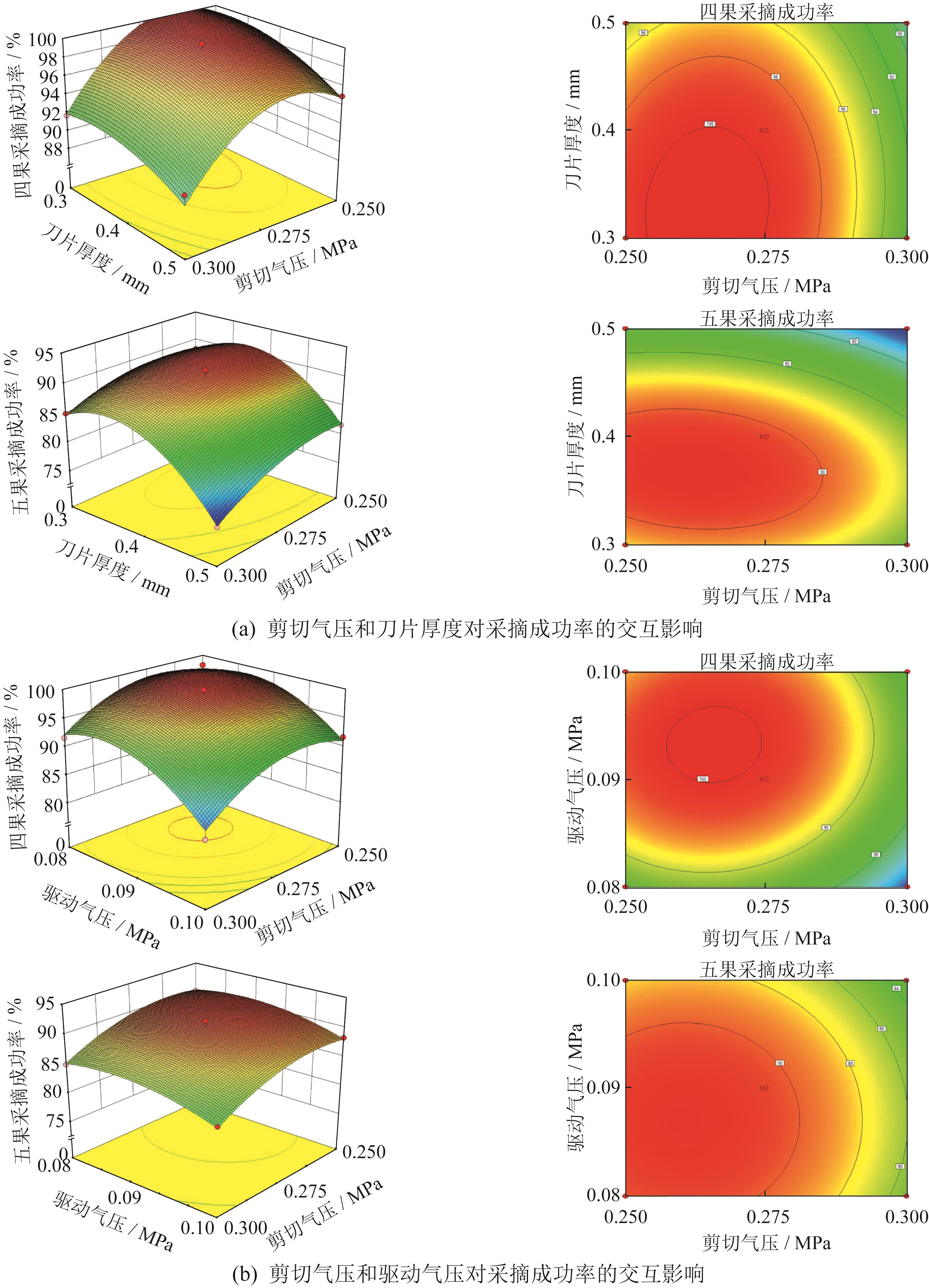
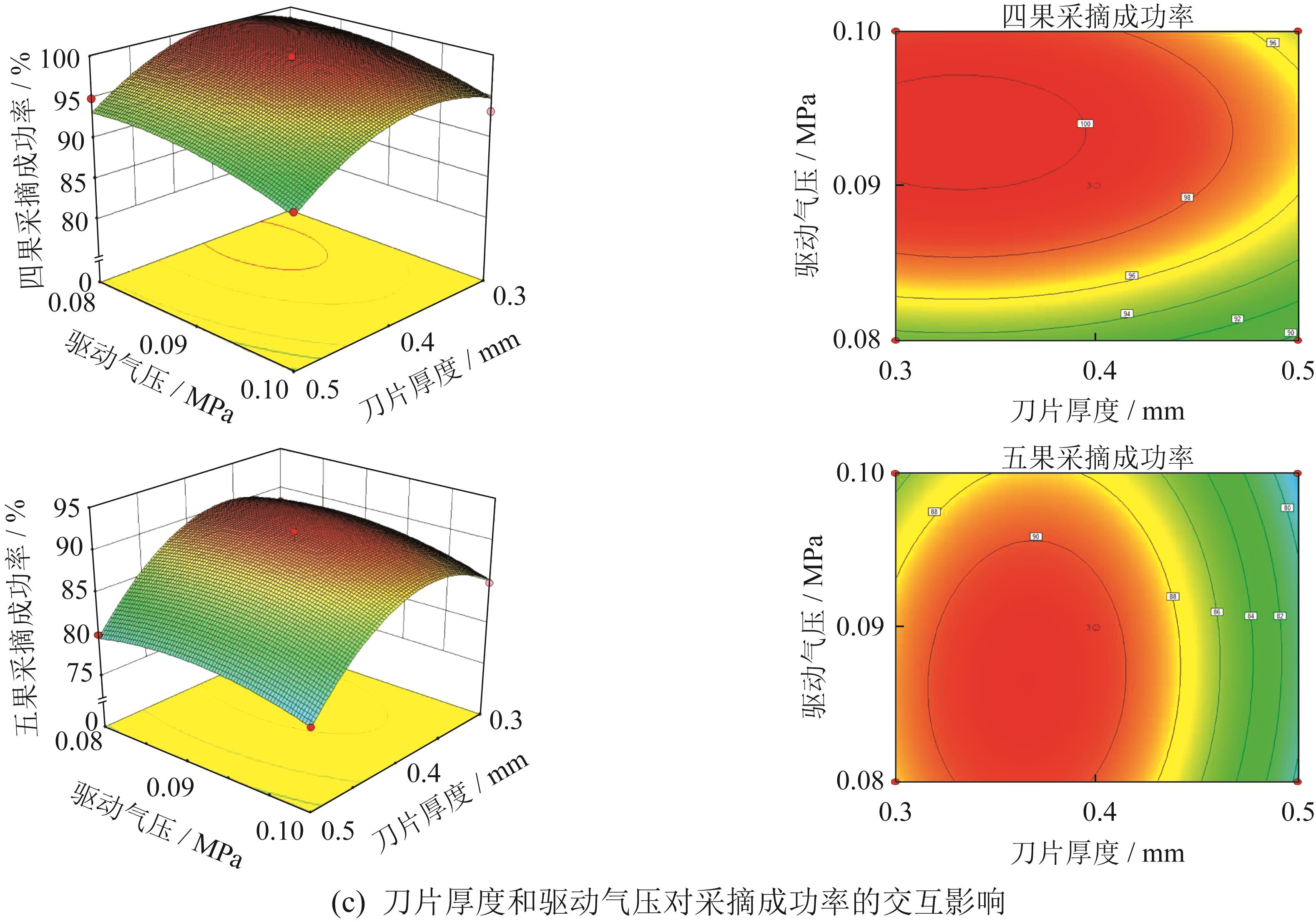
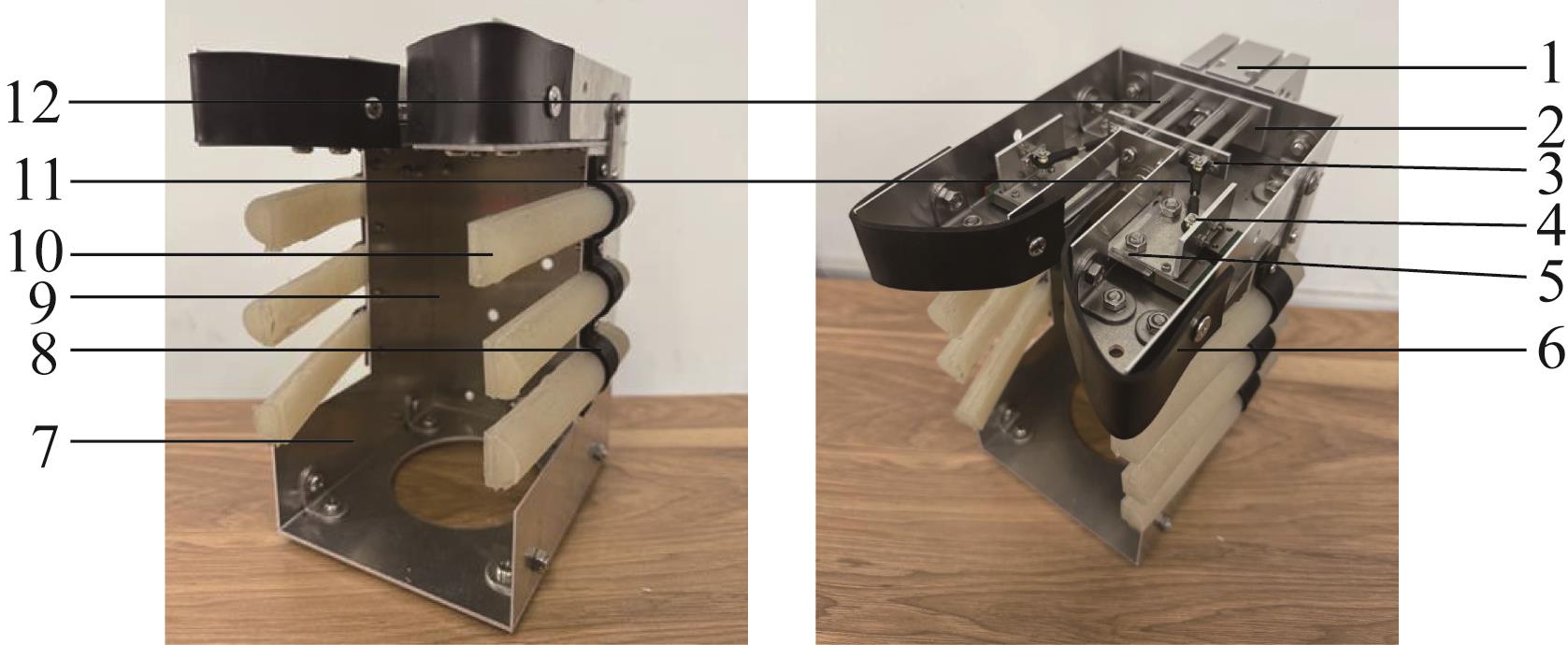
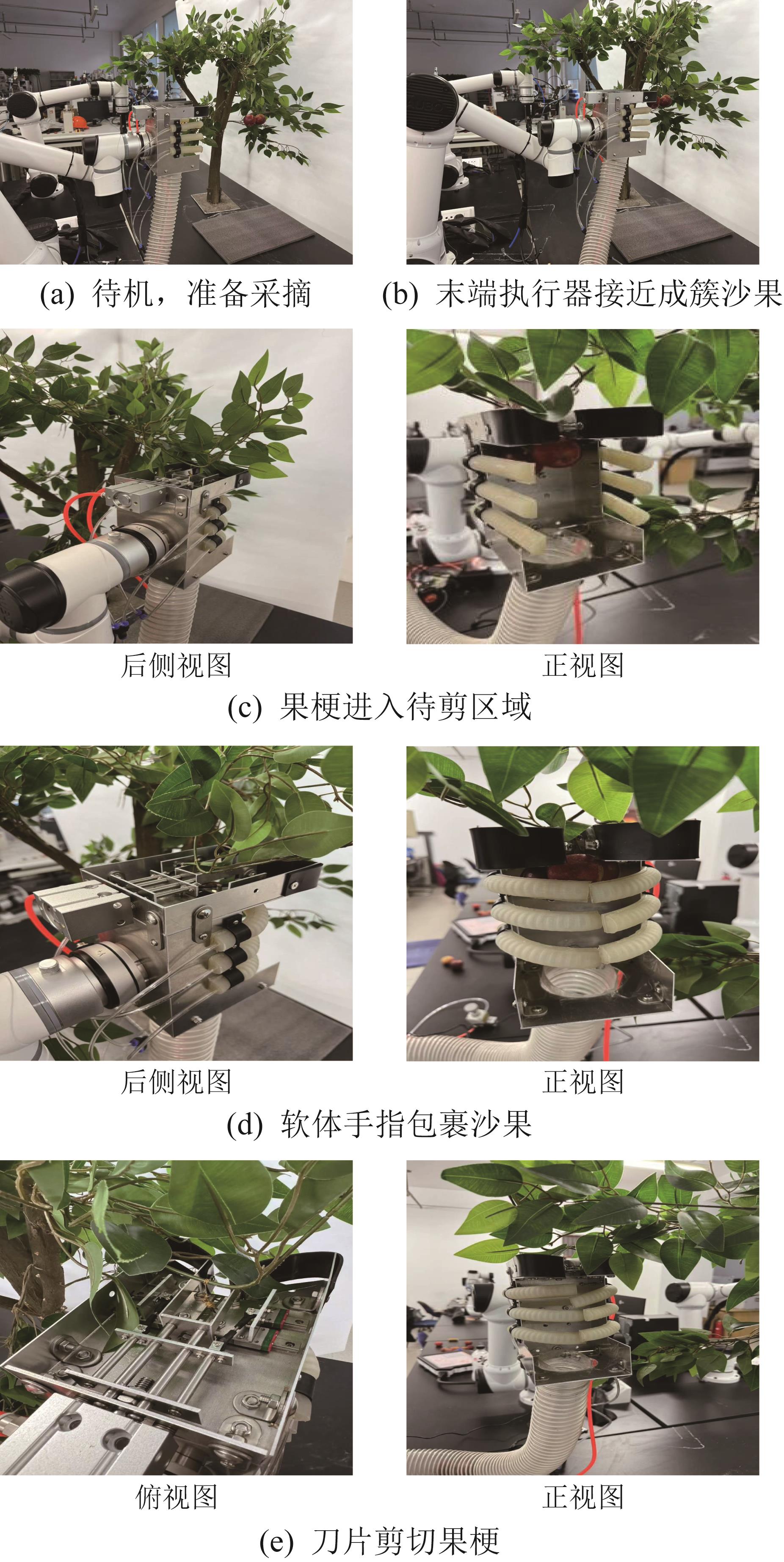
Abstract In order to solve the problems of low success rate, easy damage to fruits and unreasonable picking methods in the process of mechanical picking of clustered crabapple, a rigid-flexible coupling end-effector for picking clustered crabapple was designed. The soft fingers made of silica gel were used to wrap the crabapple, and the crabapple stalks were cut using the method of cutting. The effects of shear air pressure, blade thickness and driving air pressure on the picking success rate and their value range were determined through single factor test. On this basis, the response surface analysis of three factors and three levels was conducted to study the interactive effects of each factor on the picking success rate. The quadratic regression model was established with the success rate of picking four- and five-fruits as the response value, and the picking success rate was used as the evaluation index to optimize each factor. The results showed that the influence on the picking success rate was shear air pressure, blade thickness and driving air pressure in order from large to small. When the shear air pressure was 0.260 MPa, the blade thickness was 0.4 mm, and the driving air gas pressure was 0.09 MPa, the end-effector had the highest picking success rate, and the success rate of picking three-, four- and five-fruits could reach 100%, 100% and 91.29%, respectively. The results of parameter optimization were verified by experiment, and showed that the picking end-effector could complete the picking task, and the success rate of picking three-, four- and five-fruits could reach 100%, 100% and 91%, respectively, meeting the expected picking requirement. The use of the end-effector can reduce the labor force of picking crabapple and provide a new idea for the picking of other clustered fruit.
|
|
Received: 24 March 2024
Published: 04 March 2025
|
|
|
|
Corresponding Authors:
Liguo WU
E-mail: bluelii73@163.com;wlg0041@163.com
|
成簇沙果采摘末端执行器的设计及实验研究
针对在成簇沙果机械采摘过程中采摘成功率低、果实易损伤及采摘方式不合理等问题,设计了一种刚柔耦合的成簇沙果采摘末端执行器。用硅胶制作软体手指以包裹沙果,采用对切的方式对果梗进行剪切。通过单因素试验确定了剪切气压、刀片厚度、驱动气压对采摘成功率的影响及其取值范围,在此基础上进行三因素三水平的响应面分析,研究各因素对采摘成功率的交互影响。以四果、五果采摘成功率为响应值建立二次项回归模型,以采摘成功率为评价指标对各因素进行优化,结果表明:对采摘成功率的影响从大到小依次为剪切气压、刀片厚度、驱动气压;当剪切气压为0.260 MPa、刀片厚度为0.4 mm、驱动气压为0.09 MPa时,末端执行器具有最高的采摘成功率,三果、四果、五果采摘成功率可分别达到100%、100%、91.29%。对参数优化结果进行实验验证,结果表明,该采摘末端执行器能完成采摘任务,且三果、四果、五果采摘成功率可分别达到100%、100%、91%,满足了采摘预期要求。采用该末端执行器可以减少沙果采摘劳动力,这为其他成簇水果的采摘提供了新的思路。
关键词:
成簇沙果采摘,
末端执行器,
响应面优化,
采摘成功率
|
|
| [1] |
于斌, 陈娟, 张世鹏, 等. 沙果果酒发酵工艺优化及抗氧化活性的研究[J]. 中国酿造, 2020, 39(1): 142-145. doi:10.11882/j.issn.0254-5071.2020.01.027
YU B, CHEN J, ZHANG S P, et al. Fermentation process optimization and antioxidant property of crab apple wine[J]. China Brewing, 2020, 39(1): 142-145.
doi: 10.11882/j.issn.0254-5071.2020.01.027
|
|
|
| [2] |
李华, 赵进红, 张继亮, 等. 不同品种沙果果实品质评价[J]. 林业科技开发, 2012(6): 36-39. doi:10.3969/j.issn.1000-8101.2012.06.010
LI H, ZHAO J H, ZHANG J L, et al. An analysis and evaluation on fruit quality in different varieties of Mulus asiatica Nakai[J]. China Forestry Science and Technology, 2012(6): 36-39.
doi: 10.3969/j.issn.1000-8101.2012.06.010
|
|
|
| [3] |
BAETEN J, DONNÉ K, BOEDRIJ S, et al. Autonomous fruit picking machine: a robotic apple harvester[M]//Field and Service Robotics. Berlin, Heidelberg: Springer Berlin Heidelberg, 2008: 531-539.
|
|
|
| [4] |
彭艳, 刘勇敢, 杨扬, 等. 软体机械手爪在果蔬采摘中的应用研究进展[J]. 农业工程学报, 2018, 34(9): 11-20. doi:10.11975/j.issn.1002-6819.2018.09.002
PENG Y, LIU Y G, YANG Y, et al. Research progress on application of soft robotic gripper in fruit and vegetable picking[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 11-20.
doi: 10.11975/j.issn.1002-6819.2018.09.002
|
|
|
| [5] |
VAN HENTEN E J, VAN TUIJL B A J, HEMMING J, et al. Field test of an autonomous cucumber picking robot[J]. Biosystems Engineering, 2003, 86(3): 305-313.
|
|
|
| [6] |
赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15.
ZHAO C J, FAN B B, LI J, et al. Agricultural robots: technology progress, challenges and trends[J]. Smart Agriculture, 2023, 5(4): 1-15.
|
|
|
| [7] |
史孝杰, 王树城, 刘惠敏, 等. 林果采摘机器人研究现状与展望[J]. 农业装备与车辆工程, 2024, 62(6): 1-7. doi:10.3969/j.issn.1673-3142.2024.06.001
SHI X J, WANG S C, LIU H M, et al. Current status and prospects of research on forest fruit picking robots[J]. Agricultural Equipment & Vehicle Engineering, 2024, 62(6): 1-7.
doi: 10.3969/j.issn.1673-3142.2024.06.001
|
|
|
| [8] |
胡皓若, 张跃跃, 周佳良, 等. 果蔬采摘机器人末端执行器研究现状[J]. 中国农机化学报, 2024, 45(4): 231-236. doi:10.13733/j.jcam.issn.2095-5553.2024.04.033
HU H R, ZHANG Y Y, ZHOU J L, et al. Research status and analysis of end-effector of fruit and vegetable picking robot[J]. Journal of Chinese Agricultural Mechanization, 2024, 45(4): 231-236.
doi: 10.13733/j.jcam.issn.2095-5553.2024.04.033
|
|
|
| [9] |
李三平, 孙腾佳, 袁龙强, 等. 气动软体采摘机械手设计及实验研究[J]. 工程设计学报, 2022, 29(6): 684-694. doi:10.3785/j.issn.1006-754X.2022.00.085
LI S P, SUN T J, YUAN L Q, et al. Design and experimental research of pneumatic soft picking manipulator[J]. Chinese Journal of Engineering Design, 2022, 29(6): 684-694.
doi: 10.3785/j.issn.1006-754X.2022.00.085
|
|
|
| [10] |
陈燕, 蒋志林, 李嘉威, 等. 夹剪一体的荔枝采摘末端执行器设计与性能试验[J]. 农业机械学报, 2018, 49(1): 35-41.
CHEN Y, JIANG Z L, LI J W, et al. Design and testing of litchi picking end-effector integrated clamping and cutting performance[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 35-41.
|
|
|
| [11] |
王石榴. 香蕉采摘末端执行器夹持装置设计与试验[D]. 武汉: 华中农业大学, 2022.
WANG S L. Design and experiment of clamping device for banana picking end effector[D]. Wuhan: Huazhong Agricultural University, 2022.
|
|
|
| [11] |
Huazhong Agricultural University, 2022.
|
|
|
| [12] |
李会宾, 史云. 果园采摘机器人研究综述[J]. 中国农业信息, 2019, 31(6): 1-9.
LI H B, SHI Y. Review on orchard harvesting robots[J]. China Agricultural Informatics, 2019, 31(6): 1-9.
|
|
|
| [13] |
陈昕, 华超, 朱银龙, 等. 水果采摘机器人末端执行器的研究进展[J]. 林业机械与木工设备, 2020, 48(9): 4-10. doi:10.3969/j.issn.2095-2953.2020.09.001
CHEN X, HUA C, ZHU Y L, et al. Research progress in fruit picking robot end effectors[J]. Forestry Machinery & Woodworking Equipment, 2020, 48(9): 4-10.
doi: 10.3969/j.issn.2095-2953.2020.09.001
|
|
|
| [14] |
张跃跃, 周佳良, 胡皓若, 等. 果蔬采摘末端执行器的研究分析与发展趋势[J]. 林业机械与木工设备, 2022, 50(11): 4-10, 17.
ZHANG Y Y, ZHOU J L, HU H R, et al. Research, analysis and development trend of fruit and vegetable picking end-effector[J]. Forestry Machinery & Woodworking Equipment, 2022, 50(11): 4-10, 17.
|
|
|
| [15] |
孙成宇, 闫建伟, 张富贵, 等. 蔬菜采摘机器人及其关键技术研究进展[J]. 中国农机化学报, 2023, 44(11): 63-72.
SUN C Y, YAN J W, ZHANG F G, et al. Research progress of vegetable picking robot and its key technologies[J]. Journal of Chinese Agricultural Mechanization, 2023, 44(11): 63-72.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|