| 机器人与机构设计 |
|


|
|
|
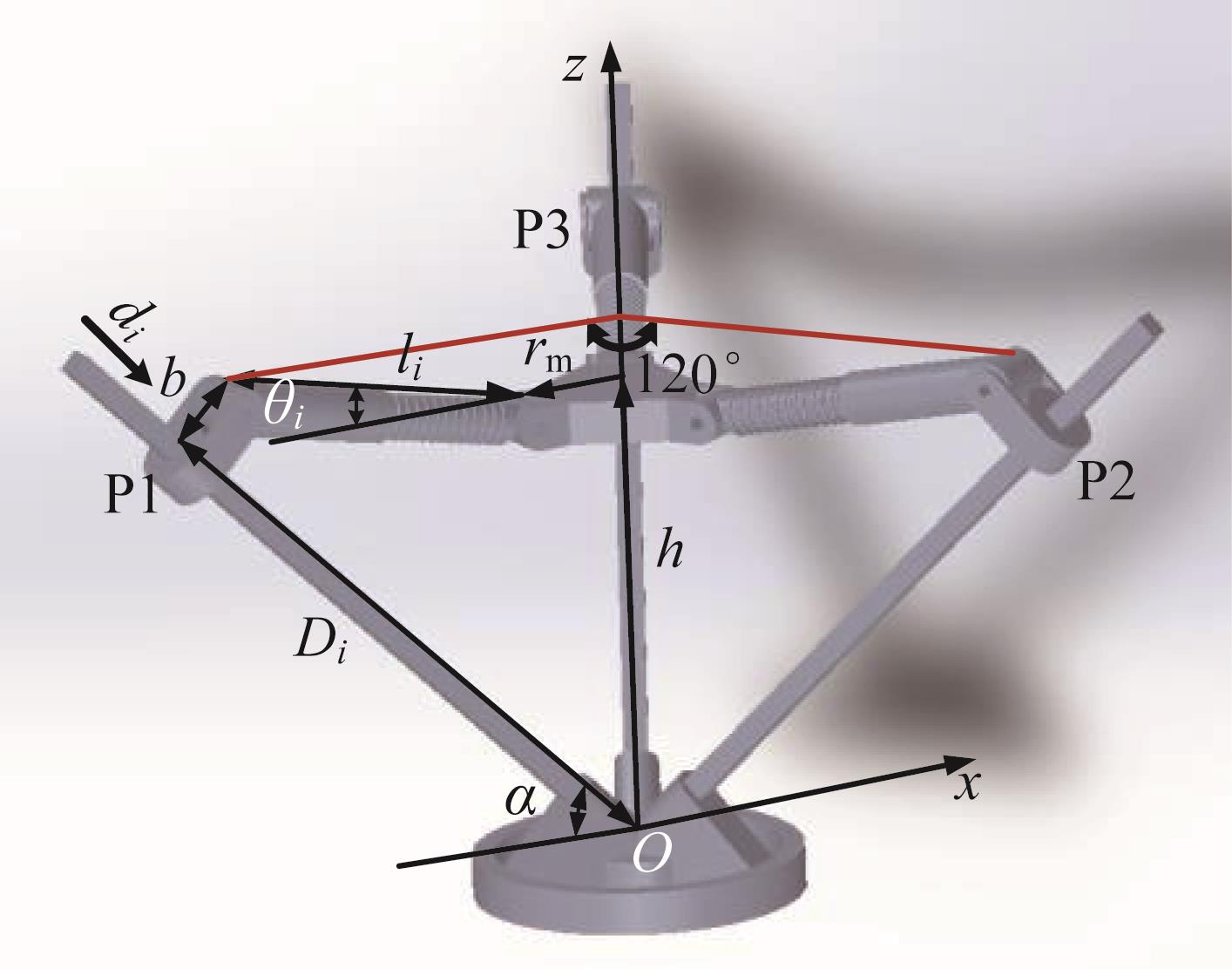
| 空间并联多稳态机构的设计与分析 |
李保坤1,2( ),李琳1(),赵伟1,陶珍钰1 ),李琳1(),赵伟1,陶珍钰1 |
1.安徽理工大学 机电工程学院,安徽 淮南 232001
2.广西制造系统与先进制造技术重点实验室,广西 桂林 541004 |
|
| Design and analysis of spatial parallel multi-stable mechanism |
| Baokun LI1,2(),Lin LI1(),Wei ZHAO1,Zhenyu TAO1 |
1.School of Mechanical and Electrical Engineering, Anhui University of Technology, Huainan 232001, China
2.Guangxi Key Laboratory of Manufacturing Systems and Advanced Manufacturing Technology, Guilin 541004, China |
引用本文:
李保坤, 李琳, 赵伟, 陶珍钰. 空间并联多稳态机构的设计与分析[J]. 工程设计学报, 2025, 32(2): 191-198.
Baokun LI, Lin LI, Wei ZHAO, Zhenyu TAO. Design and analysis of spatial parallel multi-stable mechanism[J]. Chinese Journal of Engineering Design, 2025, 32(2): 191-198.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.149
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I2/191
|
| 1 |
任军, 何文浩. 3-PSS柔性并联微操作机器人运动学及工作空间分析[J]. 机械设计与制造, 2022(12): 58-63.
REN J, HE W H. Kinematics and workspace analysis of 3-PSS flexible parallel micromanipulator[J]. Machinery Design & Manufacture, 2022(12): 58-63.
|
| 2 |
HOPKINS J B, CULPEPPER M L. Synthesis of precision serial flexure systems using freedom and constraint topologies (FACT)[J]. Precision Engineering, 2011, 35(4): 638-649.
|
| 3 |
HOPKINS J B, CULPEPPER M L. Synthesis of multi-degree of freedom, parallel flexure system concepts via freedom and constraint topology (FACT). Part Ⅱ: Practice[J]. Precision Engineering, 2010, 34(2): 271-278.
|
| 4 |
HUISJES A E, VAN DER WIJK V. Compliant manipulator design method (COMAD) for the type synthesis of all serial and parallel multi-DoF compliant mechanisms, with example of a Schönflies motion generator[J]. Mechanism and Machine Theory, 2023, 186: 105342.
|
| 5 |
HOPKINS J B, PANAS R M. Design of flexure-based precision transmission mechanisms using screw theory[J]. Precision Engineering, 2013, 37(2): 299-307.
|
| 6 |
HOWELL L L, MAGLEBY SP, OLSEN B M, et al. Handbook of compliant mechanisms[M]. Hoboken: John Wiley & Sons, Inc., 2013.
|
| 7 |
PHAM H T, WANG D G. A constant-force bistable mechanism for force regulation and overload protection[J]. Mechanism and Machine Theory, 2011, 46(7): 899-909.
|
| 8 |
HAGHPANAH B, SALARI-SHARIF L, POURRAJAB P, et al. Multistable shape-reconfigurable architected materials[J]. Advanced Materials, 2016, 28(36): 7915-7920.
|
| 9 |
ANDÒ B, BAGLIO S, BULSARA A R, et al. A bistable buckled beam based approach for vibrational energy harvesting[J]. Sensors and Actuators A: Physical, 2014, 211: 153-161.
|
| 10 |
KIM G W, KIM J. Compliant bistable mechanism for low frequency vibration energy harvester inspired by auditory hair bundle structures[J]. Smart Material Structures, 2013, 22(1): 014005.
|
| 11 |
ZHAO J, JIA J Y, WANG H X, et al. A novel threshold accelerometer with postbuckling structures for airbag restraint systems[J]. IEEE Sensors Journal, 2007, 7(8): 1102-1109.
|
| 12 |
TSAY J, CHANG H A, SUNG C K. Design and experiments of fully compliant bistable micromechanisms[J]. Mechanism and Machine Theory, 2005, 40(1): 17-31.
|
| 13 |
JENSEN B D, HOWELL L L, SALMON L G. Design of two-link, in-plane, bistable compliant micro-mechanisms[J]. Journal of Mechanical Design, 1999, 121(3): 416-423.
|
| 14 |
CHEN G M, ZHANG S Y, LI G. Multistable behaviors of compliant sarrus mechanisms[J]. Journal of Mechanisms and Robotics, 2013, 5(2): 021005.
|
| 15 |
SHCHELKUNOV E B, SHCHELKUNOVA M E, RYABOV S A, et al. Parallel mechanisms with flexible couplings[J]. Russian Engineering Research, 2021, 41(7): 593-597.
|
| 16 |
LAMBERT P, CRUZ L DA, BERGELES C. Mobility of overconstrained parallel mechanisms with reconfigurable end-effectors[J]. Mechanism and Machine Theory, 2022, 171: 104722.
|
| 17 |
吴孟丽, 陈莫, 李德祚, 等. 复合驱动并联机构的动力学建模与仿真分析[J]. 机械设计, 2024, 41(3): 112-121.
WU M L, CHEN M, LI D Z, et al. Dynamics modeling and simulation analysis of hybrid-drive parallel mechanism[J]. Journal of Machine Design, 2024, 41(3): 112-121.
|
| 18 |
PEIFFER K. On inversion of the Lagrange-Dirichlet theorem[J]. Journal of Applied Mathematics and Mechanics, 1991, 55(4): 436-441.
|
| 19 |
WANG D G, CHEN J H, PHAM H T. A tristable compliant micromechanism with two serially connected bistable mechanisms[J]. Mechanism and Machine Theory, 2014, 71: 27-39.
|
| 20 |
GUO F, SUN T, WANG P F, et al. A novel spatial parallel multi-stable mechanism with eight stable states[J]. Mechanism and Machine Theory, 2023, 183: 105254.
|
| 21 |
朱春霞, 闫志标, 王静, 等. 平面3-PRR并联机构刚柔耦合动力学研究[J]. 机械设计与制造, 2018(5): 211-213, 217.
ZHU C X, YAN Z B, WANG J, et al. Dynamics analysis of rigid-flexible coupling system of 3-PRR planar flexible parallel mechanism[J]. Machinery Design & Manufacture, 2018(5): 211-213, 217.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|