| Original article |
|


|
|
|
| Extracting hand articulations from monocular depth images using curvature scale space descriptors |
Shao-fan WANG1,?( ),Chun LI1,De-hui KONG1,?(),Bao-cai YIN2,1,3 ),Chun LI1,De-hui KONG1,?(),Bao-cai YIN2,1,3 |
1Beijing Key Laboratory of Multimedia and Intelligent Software Technology, College of Metropolitan Transportation, Beijing University of Technology, Beijing 100124, China
2School of Software Technology, Dalian University of Technology, Dalian 116024, China
3Collaborative Innovation Center of Electric Vehicles in Beijing, Beijing 100081, China |
|
|
|
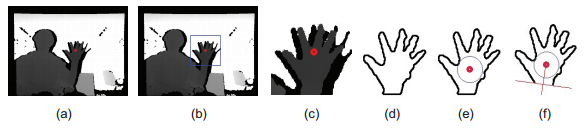
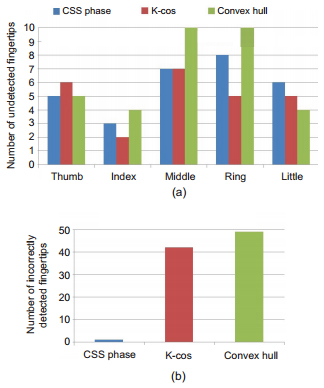
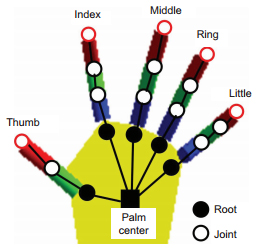
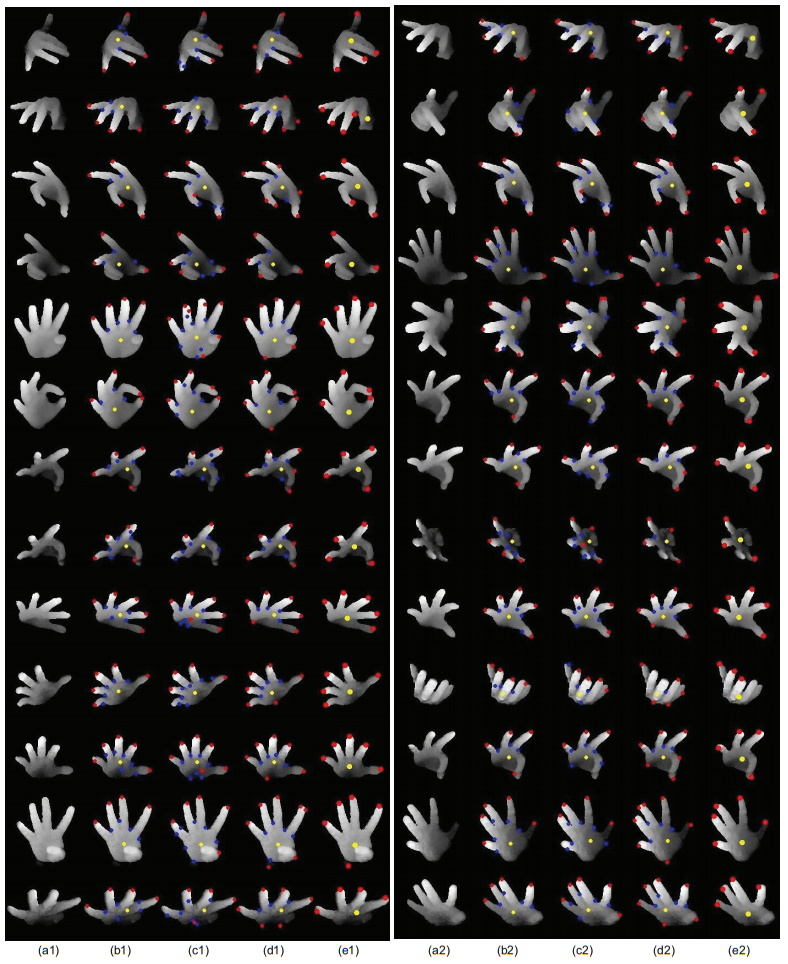
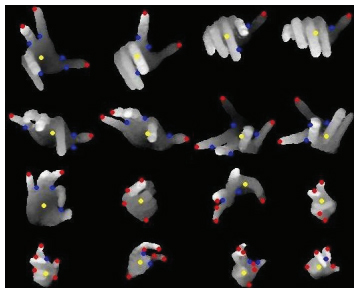
Abstract We propose a framework of hand articulation detection from a monocular depth image using curvature scale space (CSS) descriptors. We extract the hand contour from an input depth image, and obtain the fingertips and finger-valleys of the contour using the local extrema of a modified CSS map of the contour. Then we recover the undetected fingertips according to the local change of depths of points in the interior of the contour. Compared with traditional appearance-based approaches using either angle detectors or convex hull detectors, the modified CSS descriptor extracts the fingertips and finger-valleys more precisely since it is more robust to noisy or corrupted data; moreover, the local extrema of depths recover the fingertips of bending fingers well while traditional appearance-based approaches hardly work without matching models of hands. Experimental results show that our method captures the hand articulations more precisely compared with three state-of-the-art appearance-based approaches.
|
|
Received: 20 April 2015
Published: 05 January 2016
|
|
|
| Fund: National Natural Science Foundation of China(No. 61227004, 61370120, 61390510, 61300065, 61402024);Beijing Municipal Natural Science Foundation, China(No. 4142010);Beijing Municipal Commission of Education, China(No. km201410005013);the Funding Project for Academic Human Resources Development in Institutions of Higher Learning under the Jurisdiction of Beijing Municipality, China |
|
Corresponding Authors:
Shao-fan WANG,De-hui KONG
E-mail: wangshaofan@bjut.edu.cn;kdh@bjut.edu.cn
|
Extracting hand articulations from monocular depth images using curvature scale space descriptors
We propose a framework of hand articulation detection from a monocular depth image using curvature scale space (CSS) descriptors. We extract the hand contour from an input depth image, and obtain the fingertips and finger-valleys of the contour using the local extrema of a modified CSS map of the contour. Then we recover the undetected fingertips according to the local change of depths of points in the interior of the contour. Compared with traditional appearance-based approaches using either angle detectors or convex hull detectors, the modified CSS descriptor extracts the fingertips and finger-valleys more precisely since it is more robust to noisy or corrupted data; moreover, the local extrema of depths recover the fingertips of bending fingers well while traditional appearance-based approaches hardly work without matching models of hands. Experimental results show that our method captures the hand articulations more precisely compared with three state-of-the-art appearance-based approaches.
|
|
| [1] |
Abbasi S , Mokhtarian F , Kittler J . Curvature scale space image in shape similarity retrieval. Multimedia Syst. 1999, 7 (8): 467-476 doi: 10.1007/s005300050147
doi: 10.1007/s005300050147
|
|
|
| [2] |
Athitsos V , Sclaroff S . An appearance-based framework for 3D hand shape classification and camera viewpoint estimation. 2002, Proc. 5th IEEE Int. Conf. on Automatic Face and Gesture Recognition: p.40-45 doi: 10.1109/AFGR.2002.1004129
doi: 10.1109/AFGR.2002.1004129
|
|
|
| [3] |
Athitsos V , Sclaroff S . Estimating 3D hand pose from a cluttered image. 2003, Proc. IEEE Computer Society Conf. on Computer Vision and Pattern Recognition: p.432-439 doi: 10.1109/CVPR.2003.1211500
doi: 10.1109/CVPR.2003.1211500
|
|
|
| [4] |
Cerezo T, 3D hand and finger recognition using Kinect2012, Technical ReportUniversidad de Granada, Spain Available at http://frantracerkinectft.codeplex.com.
|
|
|
| [5] |
Chang WY , Chen CS , Jian YD . Visual tracking in high-dimensional state space by appearanceguided particle filtering. IEEE Trans. Image Process 2008, 17(7): 1054-1067 doi: 10.1109/TIP.2008.924283
doi: 10.1109/TIP.2008.924283
pmid: 18586623
|
|
|
| [6] |
de La Gorce M , Fleet DJ , Paragios N . Modelbased 3D hand pose estimation from monocular video. IEEE Trans. Patt. Anal. Mach. Intell. 2011, 33(9): 1793-1805 doi: 10.1109/TPAMI.2011.33
doi: 10.1109/TPAMI.2011.33
pmid: 21339527
|
|
|
| [7] |
Feng Z , Yang B , Chen Y . et al. . Features extraction from hand images based on new detection operators. Patt. Recog. 2011, 44(5): 1089-1105 doi: 10.1016/j.patcog.2010.08.007
doi: 10.1016/j.patcog.2010.08.007
|
|
|
| [8] |
Keskin C , K?ra? F , Kara YE . et al. . Real time hand pose estimation using depth sensors 2011, London In: Fossati, A., Gall, J., Grabner, H., et al. (Eds.), Consumer Depth Cameras for Computer Vision, Springer: p.119-137 doi: 10.1007/978-1-4471-4640-7_7
doi: 10.1007/978-1-4471-4640-7_7
|
|
|
| [9] |
Kirac F , Kara YE , Akarun L . Hierarchically constrained 3D hand pose estimation using regression forests from single frame depth data. Patt. Recog. Lett. 2014, 50(3): 415-422 doi: 10.1016/j.patrec.2013.09.003
doi: 10.1016/j.patrec.2013.09.003
|
|
|
| [10] |
Lee D , Lee S . Vision-based finger action recognition by angle detection and contour analysis. ETRI J. 2011, 33(3): 415-422 doi: 10.4218/etrij.11.0110.0313
doi: 10.4218/etrij.11.0110.0313
|
|
|
| [11] |
Ma Z , Wu E . Real-time and robust hand tracking with a single depth camera. Vis. Comput. 2014, 30(10): 1133-1144 doi: 10.1007/s00371-013-0894-1
doi: 10.1007/s00371-013-0894-1
|
|
|
| [12] |
Maisto M , Panella M , Liparulo L . et al. . An accurate algorithm for the identification of fingertips using an RGB-D camera. IEEE J. Emerg. Sel. Topics Circ. Syst. 2013, 3(2): 272-283 doi: 10.1109/JETCAS.2013.2256830
doi: 10.1109/JETCAS.2013.2256830
|
|
|
| [13] |
Morshidi M , Tjahjadi T . Gravity optimised particle filter for hand tracking. Patt. Recog. 2014, 47(1): 194-207 doi: 10.1016/j.patcog.2013.06.032
doi: 10.1016/j.patcog.2013.06.032
|
|
|
| [14] |
Nagarajan S , Subashini T , Ramalingam V . Vision based real time finger counter for hand gesture recognition. Int. J. Technol. 2012, 2(2): 1-5
|
|
|
| [15] |
Oikonomidis I , Kyriazis N , Argyros AA . Efficient model-based 3D tracking of hand articulations using Kinect. BMVC 2011, 1(2): 1-11
|
|
|
| [16] |
Qian C , Sun X , Wei Y , et al.. Realtime and robust hand tracking from depth. 2014, Proc. IEEE Conf. on Computer Vision and Pattern Recognition, p.1106-1113 doi: 10.1109/CVPR.2014.145
doi: 10.1109/CVPR.2014.145
|
|
|
| [17] |
Ren Z , Yuan J , Zhang Z . Robust hand gesture recognition based on finger-earth movera€?s distance with a commodity depth camera. 2011, Proc. 19th ACM Int. Conf. on Multimedia, p.1093-1096 doi: 10.1145/2072298.2071946
doi: 10.1145/2072298.2071946
|
|
|
| [18] |
Rosales R , Athitsos V , Sigal L , et al.. 3D hand pose reconstruction using specialized mappings. 2001, Proc. 8th IEEE Int. Conf. on Computer Vision, p.378-385 doi: 10.1109/ICCV.2001.937543
doi: 10.1109/ICCV.2001.937543
|
|
|
| [19] |
Schlattmann M , Kahlesz F , Sarlette R , et al.. Markerless 4 gestures 6 DOF real-time visual tracking of the human hand with automatic initialization. Comput. Graph. Forum. 2007, 26(3): 467-476 doi: 10.1111/j.1467-8659.2007.01069.x
doi: 10.1111/j.1467-8659.2007.01069.x
|
|
|
| [20] |
Tomasi C, Petrov S, Sastry A . 3D tracking = classification + interpolation. 2003, Proc. 9th IEEE Int. Conf. on Computer Vision, p.1441-1448 doi: 10.1109/ICCV.2003.1238659
doi: 10.1109/ICCV.2003.1238659
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|