


船舶通海阀箱作为海水循环系统的核心功能单元,其流道通畅性直接决定了冷却水供应、消防稳压与压载平衡等关键系统的运行效能。然而,海洋生物污损引发的流道堵塞已成为制约船舶系统可靠性的主要因素。研究表明,藤壶幼虫与硅藻等污损生物的协同附着会造成流道通流面积在3个月内显著缩减,从而导致冷却泵组能耗急剧增加。更为严重的是,生物膜诱导的局部湍流会加速通海阀箱内壁的腐蚀疲劳,增加结构失效风险。一旦海洋生物完成附着变态并形成成熟的生物膜,现有的清理技术将面临效能衰减,导致冷却效率下降,进而影响装备的正常运转。若不采取有效的防治措施,则船舶必须进行频繁的清洗或管道更换,导致维修计划外的频繁停机以及维护和运行成本增加[1]。因此,生物早期生命阶段(如卵、浮游幼虫、孢子)的主动预防策略成为突破防污瓶颈的关键。在现有的防污技术体系中,传统的机械清理方法受限于通海阀箱的管径以及复杂的流道结构,存在可达性差和操作成本高的双重缺陷;化学防污法虽可通过次氯酸钠缓释技术实现原位电解制备,但所生成的氯胺类致癌物存在生态累积风险。此外,上述方法仅能针对已附着的成年生物进行被动清理,且对钙化层和深层生物膜的清除效率较低[2]。为解决这一问题,预防性防污技术逐渐成为研究热点。例如:基于超声能量场调控的非接触式物理防污技术利用空化效应[3],通过主动干预生物的早期附着阶段,能够有效防止海洋生物的附着和生长。相比于传统清理方法,超声防污技术不仅能够预防生物膜的形成,还能有效提高清洁效率,并完全避免化学试剂的二次污染风险。
在超声防污技术优化方面,林基艳等[4]创新性地构建了声子晶体结构调控模型,通过优化换能器阵列的周期性排布,使声能传递效率较传统设计显著提高。郑晓涛等[5]采用有限元参数化逆向设计方法,成功控制了变幅杆端面振幅均匀度的误差率,为超声能量的轴向稳定传输提供了结构保障。孔亚广等[6]联合显微计数法与荧光染色法,验证了当超声功率密度从0.3 W/cm2提升至0.5 W/cm2时,污损生物的灭活率由89.09%提高至94.70%,并通过进一步分析揭示了声强参数与生物膜清除效率之间的非线性关系。Legg等[7]针对目前在实验室和实际海洋环境中利用声波技术处理海洋污损生物的方法进行了研究,得出了20 kHz的低超声波频率是超声防污的最佳选择。Peshkovsky等[8-10]开发了一种新型的大功率超声换能器,该换能器辐射面大,放大系数高。Wei等[11]对锥形尖端的多级超声变幅杆进行了解析设计,有效增强了其声化学性能。综上,现有研究在超声防污技术的能量传递、结构优化、参数效应及频率选择等方面取得了一定成果,但缺乏专门针对海洋生物的卵、浮游幼虫等早期生命形态的干预机制与防控设计研究,尚未实现从生物污损形成源头进行主动预防的突破。
为解决上述问题,本文结合超声清洗技术与等效电路基础理论,创新性地设计了一款由换能器、变幅杆和振动棒组成的超声防污装置。通过将超声技术的应用重心从清理成熟生物膜转向抑制生物早期附着,利用20 kHz超声波的空化效应定向破坏海洋生物的卵和浮游幼虫,实现对生物污损的源头预防性控制,从而解决传统防污技术“被动应对、效率低下”的问题。为提升超声防污装置的预防效能,设计了由18个单元串联组成的杠铃式振动棒,通过多单元协同振动来优化声场分布,以解决传统结构声场覆盖不均匀的缺陷。同时,通过构建换能器-变幅杆-振动棒三级等效电路模型,并结合声场强度分布特征设计关键结构参数,利用主动干预机制有效抑制海洋生物的早期附着行为,以显著提升装置的清理效能与运行稳定性。随后,使用COMSOL Multiphysics软件对超声波在通海阀箱内部的传播过程进行仿真分析,以验证超声波传播路径与声场覆盖的合理性[12]。最后,模拟海洋环境并放入超声防污装置,观察生物附着情况,以验证装置的实际防污效果。本研究旨在为海洋工程装备提供兼具高效性、环保性和低成本优势的生物污损防治方案。
1 超声防污装置设计
图1
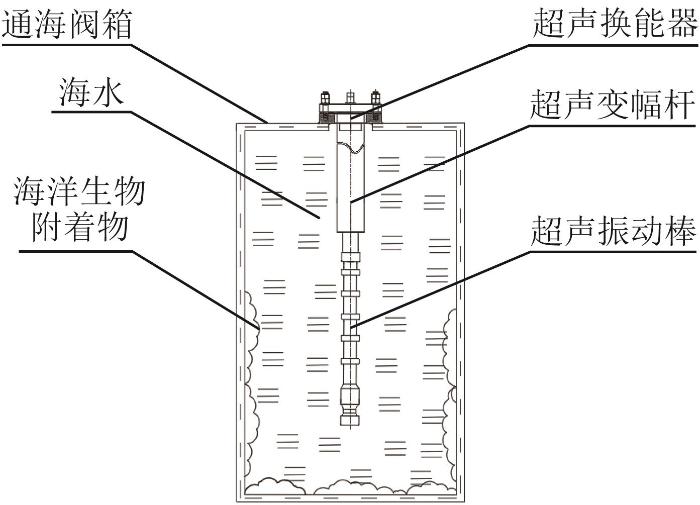
图1
通海阀箱超声防污装置示意图
Fig.1
Schematic diagram of ultrasonic anti-fouling device for sea chest
1.1 超声换能器设计
超声换能器的工作原理基于压电陶瓷的逆压电效应:当激励电压施加在换能器两端时,压电陶瓷晶堆响应并产生20 kHz的高频机械振动,实现电信号到机械振动的转换。该振动经变幅杆、振动棒放大后,通过海水介质传递至通海阀箱内部,利用空化效应抑制海洋生物的早期附着,从而完成能量传递与防污功能。
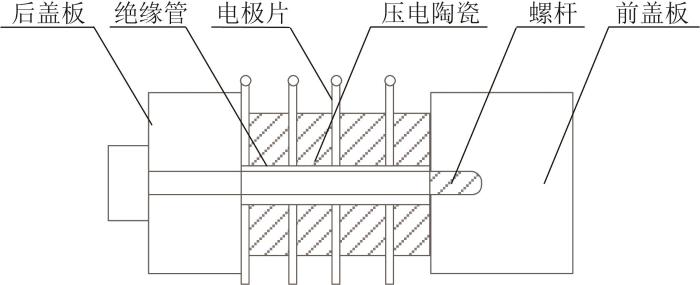
本文采用夹心式换能器结构,其由PZT-4压电陶瓷晶堆、316L不锈钢前后盖板、高强度螺杆、铜电极片及绝缘管等组成,如图2所示。
图2
为量化分析该夹心式换能器的振动特性,基于等截面细棒一维振动理论建立三部件(前盖板、压电陶瓷晶堆、后盖板)等效机械阻抗模型[14]。通过将换能器的机械振动行为转化为基于力—速度关系的阻抗网络,简化多物理场耦合系统的参数优化过程。
图3
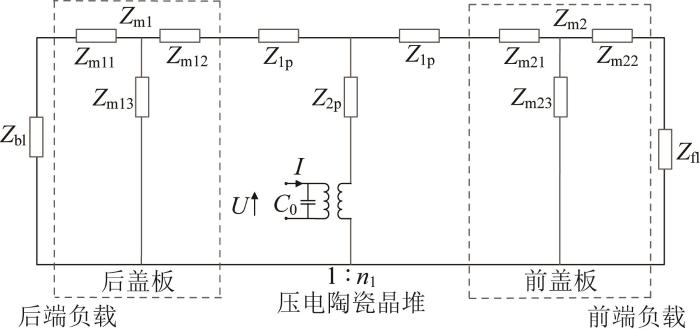
图3
夹心式换能器的机电等效电路
Fig.3
Electromechanical equivalent circuit of sandwich transducer
在大部分情况下,通常是给定换能器的频率,并利用换能器的频率方程来设计换能器的形状和尺寸。为了得到换能器的频率方程,应先获取换能器前、后盖板的输入阻抗。换能器的后盖板可视作等截面圆柱且为空载,故本文只考虑换能器前盖板的负载阻抗。由图3可知,换能器前盖板的输入阻抗
1.2 超声变幅杆设计
在超声防污装置中,变幅杆作为换能器与振动棒之间能量传递的核心构件,其构型的合理选择直接决定了超声能量的放大效果、应力的分布特性以及阻抗的匹配效率,进而影响通海阀箱内的声场覆盖率与防污效能。
超声防污技术中常采用指数型、圆锥型、阶梯型变幅杆。其中:指数型变幅杆的阻抗变化呈指数曲线,与换能器输出阻抗、振动棒负载阻抗的匹配偏差较大,易导致能量反射损耗增加;圆锥型变幅杆的振幅放大系数小,难以满足实际工程需求;阶梯型变幅杆的振幅放大系数大且结构简单,与换能器及振动棒的阻抗适配性高。考虑到超声防污装置需要在输出端获得较大的振幅增益,本文选用性能最优的阶梯型变幅杆,其更适配通海阀箱的实际工况[19]。
在设计阶梯型变幅杆时,主要考虑长度和横截面积,即需要保证其既能与换能器前端面紧密连接和配合,又能与换能器前盖板的阻抗共轭匹配,且自身固有共振频率趋近20 kHz。本文所设计的阶梯型变幅杆由2段截面积不同的均匀杆组成,其结构如图4所示。
图4
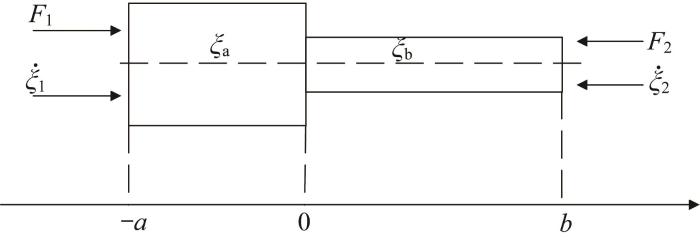
图4
阶梯型变幅杆结构示意图
Fig.4
Schematic diagram of stepped amplitude transformer structure
因变幅杆需要实现振幅放大、低能耗目标,而2段杆件的振动耦合特性复杂,故将机械振动系统中的力、速度、机械阻抗类比为电路中的电压、电流、阻抗,通过建立等效电路模型直观分析阻抗匹配特性,以避免超声能量在截面积突变处反射,从而为振幅优化与效率提升提供依据。基于机电类比理论构建阶梯型变幅杆的机械等效电路,如图5所示。图中:Za、Zb分别为变幅杆大、小截面段的机械阻抗,满足
图5
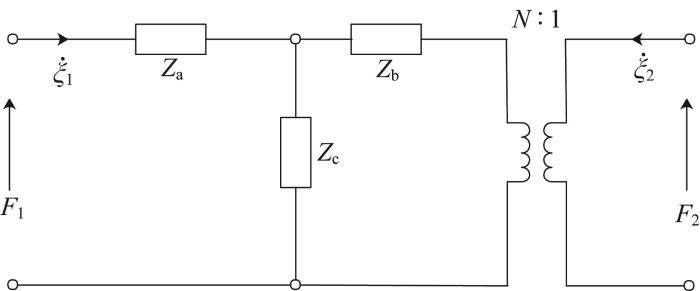
图5
阶梯型变幅杆的机械等效电路
Fig.5
Mechanical equivalent circuit of stepped amplitude transformer
从阻抗匹配需求出发,变幅杆的输入阻抗即为Zfl,将A=0,B=4.59×107,C=2.18×10-8,D=0代入上文相关公式,可得Zfl=4.59×107 Ns/m3。根据图5,可得变幅杆大端的输入阻抗表达式:
1.3 超声振动棒设计
图6

图7
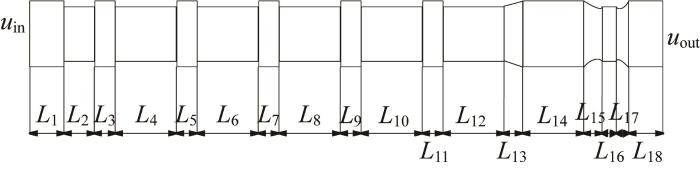
图7
杠铃式振动棒结构示意图
Fig.7
Schematic diagram of barbell-shaped vibration rod structure
为了计算杠铃式振动棒的增益系数,需要建立并求解每个单元的纵向振动控制方程:
式中:
由于圆柱角和圆锥角的几何差异,需要单独驱动纵向振动控制方程。针对每个单元构建独立的坐标系,并根据边界点上力和速度连续的约束条件求解各单元的位移。各单元的位移通解如下(单元13、15、17为锥形截面圆柱单元,其余为等截面圆柱单元):
式中:un
利用各单元的边界条件,得到位移方程组(u1、u2、…、u18),则杠铃式振动棒的增益系数G可表示为:
式中:uin为振动棒输入端(即与变幅杆连接端)的纵向振幅,uout为振动棒输出端的纵向振幅。
杠铃式振动棒中各单元通过机械串联方式连接,每个单元的机械阻抗可基于其几何特性和材料参数推导得到。由此建立杠铃式振动棒整体的机械等效电路,如图8所示。
图8
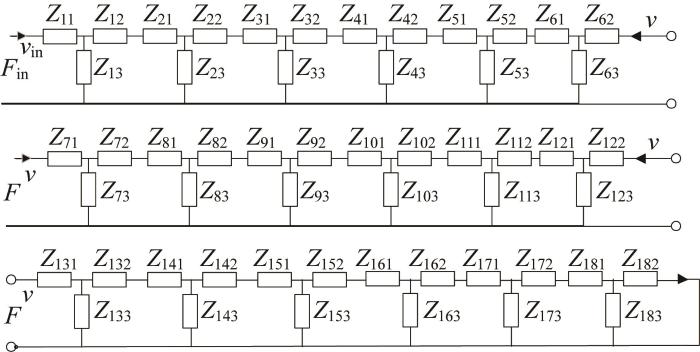
图8
杠铃式振动棒的机械等效电路
Fig.8
Mechanical equivalent circuit of barbell-shaped vibration rod
对于等截面圆柱单元,其机械阻抗可表示为:
其中:
式中:Zn 为第n个单元的机械阻抗,
对于锥形截面圆柱单元,其机械阻抗可表示为:
式中:Nn 为锥形截面圆柱单元的截面直径比,Nn =da/db,da、db 分别为锥形截面圆柱单元大、小端的直径。
结合超声防污装置中各部件间的阻抗匹配要求、20 kHz的目标共振频率以及316L不锈钢材料的力学特性,在设计杠铃式振动棒时,等截面圆柱单元采用固定直径结构,直径为0.04 m或0.02 m;锥形截面圆柱单元采用变径结构,大端直径为0.04 mm,小端直径为0.02 m。基于阻抗公式
2 超声防污装置仿真分析与实验验证
2.1 多物理场耦合仿真模型构建
为验证超声防污装置的防污效能,基于上文换能器、变幅杆及振动棒的设计,采用COMSOL Multiphysics软件建立结构-声-流多物理场耦合仿真模型。该模型涵盖夹心式换能器、阶梯型变幅杆、杠铃式振动棒及通海阀箱结构,用于分析阀箱内声场分布特性与空化效应生成机制。同时,为验证杠铃式振动棒的结构优势,同步构建单级振动棒的对照耦合模型,该模型的材料、激励条件与杠铃式振动棒组的完全一致,仅振动棒几何结构不同。
夹心式换能器采用PZT-4材料,其机电耦合系数与极化方向严格匹配纵向振动模式;阶梯型变幅杆及杠铃式振动棒选用316L不锈钢,通过材料参数库定义其弹性模量与泊松比;海水介质设定为黏性可压缩流体,声速与密度依据海洋环境数据校准。本文设海水温度为10 ℃,海水的动力黏度为1.31×10-3 Pa·s,密度为1 025 kg/m3,海水中纵波声速为1 480 m/s。这些参数对超声波的传播特性有显著影响,尤其是传播速度和衰减速率。在建模过程中,在换能器表面施加正弦激励电压,以模拟超声波的发射过程。正弦激励电压的波动方程设为20sin(2πf0t),其中f0为超声工作频率。通过该电压驱动换能器的压电陶瓷晶堆产生高频机械振动,进而将电能转化为声能并在海水介质中传播。其中,接地端子设置在换能器的电极底部,以确保电场均匀分布并稳定激励换能器工作。
为实现电气与机械的耦合求解,在COMSOL Multiphysics软件中通过电势边界条件将接地端子设置为零电势,并通过端子边界条件定义激励端子。声场区域采用自由三角形网格划分,以适应复杂几何形状;而在关键区域,如换能器表面、变幅杆和振动棒位置处,由于声压梯度较大和应力集中,需要进行网格细化。具体而言,关键区域最大单元的网格尺寸设置为3 460 (m/s)/f0/24,其中:3 460 m/s表示PZT-4材料中的纵波声速,24表示PZT-4材料中每个波长内划分的网格单元数。在海水区域,声波传播较为均匀,可适当增大网格单元尺寸,以提高计算效率,海水区域最大单元的网格尺寸设置为1 480 (m/s)/f0/6,其中:1 480 m/s表示海水中的纵波声速,6表示海水中每个波长内划分的网格单元数。
在仿真分析中,为详细地了解超声波在通海阀箱内部传播时的声压分布特性,在特定位置处设置探针来测量声压值。以换能器辐射端面中心为坐标原点,换能器轴向振动传播方向为Y向(纵向),垂直于换能器轴向的方向为X向(横向),建立直角坐标系。声压监测探针布置在Y=1 200 mm、Y=1 500 mm、Y=3 000 mm三个轴向截面内的X=0 mm、X=±1 500 mm处。通过采集典型位置处的声压幅值来量化分析声场的轴向衰减特性与横向分布均匀性,以评估超声防污装置的声场覆盖效果与防污性能。
2.2 仿真结果分析
通过仿真分析得到单级振动棒与杠铃式振动棒作用下的通海阀箱声场,如图9所示。
图9
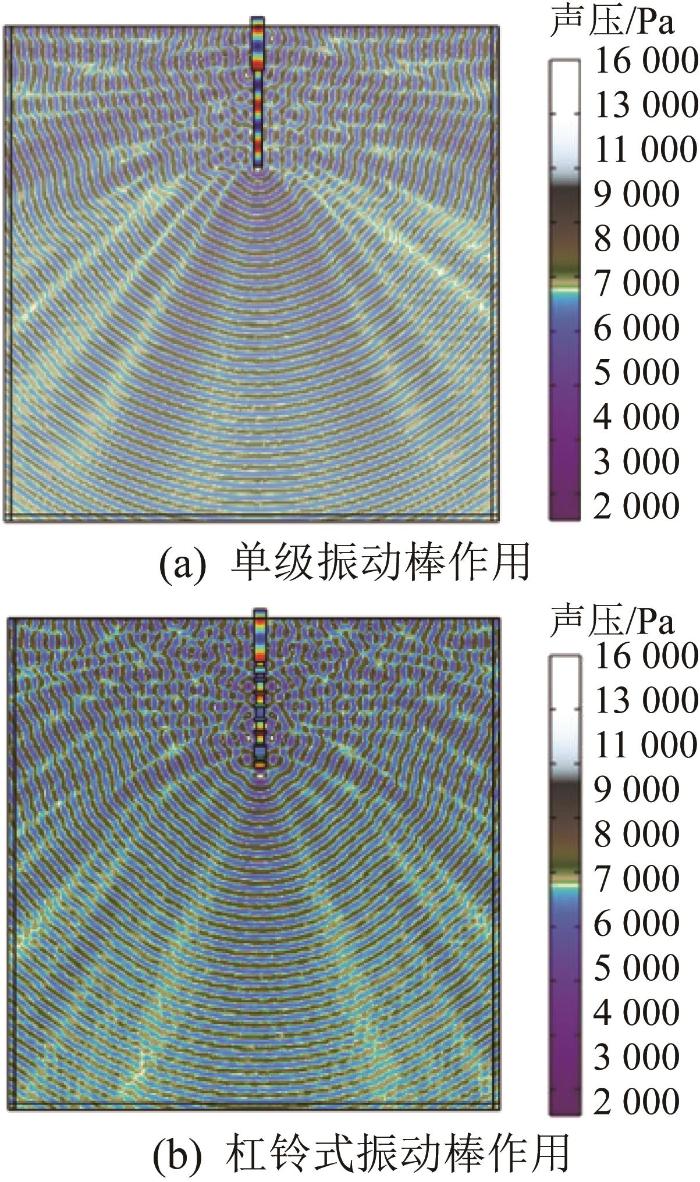
图9
单级和杠铃式振动棒作用下通海阀箱的声场对比
Fig.9
Comparison of sound field in sea chest under action of single-stage and barbell-shaped vibration rods
图9仿真结果表明,单级振动棒与杠铃式振动棒作用下通海阀箱内的声场分布大相径庭,但单级振动棒的振动能量沿单一路径传递,声波传播方向集中且衰减速率快,导致通海阀箱内声场呈现中心强、边缘弱的特点。而杠铃式振动棒通过单元间的串联协同振动,实现了振动能量的分段调控与叠加放大,最终在通海阀箱内形成对称驻波声场,声压衰减呈现梯度变化,边缘区域声压始终维持在有效水平。
表1 杠铃式振动棒作用下的仿真声压值 (Pa)
Table 1
| 与换能器的纵向距离/mm | 与换能器的横向距离/mm | |
|---|---|---|
| 0 | 1 500 | |
| 1 200 | 13 152.7 | 8 457.4 |
| 1 500 | 11 172.8 | 6 789.4 |
| 3 000 | 7 782.9 | 3 554.9 |
表2 单级振动棒作用下的仿真声压值 (Pa)
Table 2
| 与换能器的纵向距离/mm | 与换能器的横向距离/mm | |
|---|---|---|
| 0 | 1 500 | |
| 1 200 | 11 473.3 | 6 732.8 |
| 1 500 | 8 758.2 | 4 732.6 |
| 3 000 | 5 742.9 | 1 749.4 |
综上,仿真结果从声场分布形态与关键位置声压值两方面,明确了杠铃式振动棒的结构优越性,这可为后续通过实验验证超声防污装置的实际效能奠定理论基础。
2.3 实验验证
为验证超声防污装置的实际效能,以及明确杠铃式振动棒结构优化的改进效果,设置空白对照组、单级振动棒组和杠铃式振动棒组,开展模拟海洋环境的防污对比实验,并观察不同条件下通海阀箱底部的海洋生物附着情况。
搭建模拟海洋环境的实验平台,如图10所示。实验设备包括20 kHz超声防污装置、定制通海阀箱模型、信号放大器、水听器、信号采集卡和电脑等数据采集设备及生物采样设备。实验介质为海水,引入藤壶幼虫模拟海洋污损生物早期附着环境。
图10

在防污实验中,通海阀箱模型采用与实际通海阀箱材料一致的316L不锈钢板。3组对比实验同步进行,均持续运行15 d。实验结束后,取出通海阀箱模型,观察并记录其底部的海洋生物附着形态与密度,结果如图11所示。在实验过程中,通过水听器实时监测通海阀箱底部的声压值,经信号采集卡转换后由电脑记录并分析。
图11
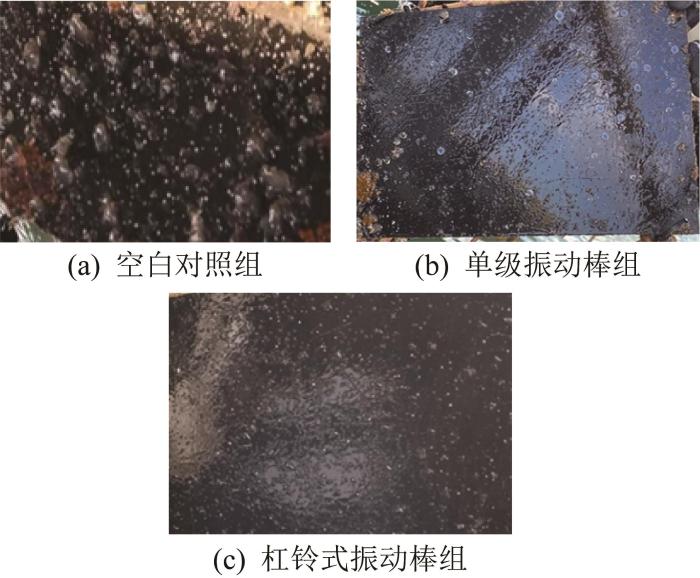
图11
通海阀箱底部的生物附着情况对比
Fig.11
Comparison of biological attachment at the bottom of sea chest
对比图11可知,模拟海洋环境的防污实验结果直观验证了超声防污装置的实际应用价值。3组实验中通海阀箱底部的生物附着情况差异显著:空白对照组的阀箱底部完全被污损生物覆盖,形成连续生物层,表明无超声干预时海洋生物会快速完成附着和繁殖。单级振动棒组虽有一定的防污效果,但阀箱底部边缘生物附着明显,原因在于单级振动棒存在声场盲区。进一步通过水听器的实时监测发现,单级振动棒在距离换能器纵向1 200 mm、横向1 500 mm处的声压值仅为6 428.8 Pa,而在距换能器纵向3 000 mm的边缘区域的声压值降至1 577.4 Pa,导致边缘区域无法有效破坏幼虫细胞膜。相比之下,杠铃式振动棒展现出优异的防污性能,其在相同关键位置处的声压值分别达到8 239.4 Pa和3 327.9 Pa,稳定性显著更优,最终使阀箱底部90%以上的区域保持洁净,仅角落有少量零散幼虫附着,无明显生物膜形成。
从作用机理来看,杠铃式振动棒的优异防污效果核心源于其独特的多单元结构设计:15个等截面圆柱单元与3个锥形截面圆柱单元的串联设计克服了单级振动棒的声场局限性。单级振动棒的振动能量仅沿轴向单一路径传递,易在通海阀箱底部边缘、角落形成声场盲区,导致局部声压无法触发空化效应;而杠铃式振动棒的18个串联单元通过边界处力、速度连续的条件实现了协同振动耦合,使得超声波从轴向单一路径传播拓展为径向多路径传播,同时等截面圆柱单元减少了声波反射损耗,锥形截面圆柱单元可引导能量辐射,两者配合填补了单级振动棒的声场空白,使得通海阀箱内声压分布梯度均匀,大幅提升了空化区域覆盖率,确保绝大多数区域可产生空化效应。
全域覆盖的空化效应为防污提供了关键技术支撑:一方面,空化效应能够对海水中悬浮的以及初始附着的藤壶幼虫形成有效作用,阻断其附着与变态发育;另一方面,伴随空化效应出现的声流可持续冲刷通海阀箱底部,进一步抑制受损幼虫附着,形成空化破坏和声流冲刷的协同作用,从源头切断海洋生物的初始附着。相较于单级振动棒因声场盲区而导致的局部防污失效,杠铃式振动棒通过多单元结构实现了全域空化覆盖,从根本上提升了防污的全面性与可靠性,这是其防污效能显著优于单级振动棒的核心原因。
3 结 论
本文针对船舶通海阀箱内的海洋生物淤堵问题,设计了基于20 kHz超声波空化效应的防污装置。通过构建基于等效电路法的全链路阻抗匹配模型和设计新型的杠铃式振动棒,形成了主动预防性防控方案。结合仿真分析与实验验证,得到以下结论:
1)相较于传统机械清理、化学防污等被动防污技术,基于超声波空化效应的主动防污技术通过破坏海洋生物卵与浮游幼虫的细胞膜,从源头抑制生物污损,规避了传统技术清理滞后和污染环境的缺陷,实现了非接触式环保清理。
2)创新设计了由18个单元组成的杠铃式振动棒,并结合换能器—变幅杆—振动棒的全链路阻抗匹配体系,构建了高效能量传递与声场优化系统。杠铃式振动棒由15个等截面圆柱单元与3个锥形截面圆柱单元串联组成,依托储能-聚能协同振动优化声场,使得空化区域覆盖率超过90%。同时,基于等效电路法推导了超声防污装置各部件的机械阻抗,通过设计变幅杆截面比、振动棒单元长度等参数,实现了阻抗适配和减少了能量反射损耗,为高效防污提供了双重支撑。
3)多物理场耦合仿真验证了杠铃式振动棒的结构优势,解决了单级振动棒中心强、边缘弱的声场盲区问题;模拟海洋环境的防污对比实验进一步验证了超声防污装置可使通海阀箱底部90%以上的区域保持洁净,仅角落附着少量零散幼虫,且无明显生物膜形成,这充分证明了该装置在实际海洋环境中的可靠性与防污效能。所设计的超声防污装置可为海洋工程装备生物污损的预防性防控提供切实可行的技术方案。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.180
参考文献
海水冷却管道防污技术研究进展
[J].
Research progress in antifouling methods of seawater cooling system
[J].
Water disinfection via controlled release of biocides for reduced toxicity and extended shelf life: a review
[J].
Influence of ultrasound power on acoustic streaming and micro-bubbles formations in a low frequency sono-reactor: mathematical and 3D computational simulation
[J].
基于声子晶体异质位错结结构的大尺寸楔形变幅杆的优化设计
[J].
Optimization design of ultrasonic vibration system of large-dimension wedge horn with phononic crystal heterojunction dislocation structure
[J].
超声波防海生物技术试验研究
[J].
Experimental study of ultrasonic marine anti-biofouling technique
[J].
超声波防除海洋污损生物研究
[C]//
The research about ultrasonic in controlling marine fouling organisms
[C]//
Acoustic methods for biofouling control: a review
[J].
Matching a transducer to water at cavitation: acoustic horn design principles
[J].
Continuous-flow production of a pharmaceutical nanoemulsion by high-amplitude ultrasound: process scale-up
[J].
Scalable high-power ultrasonic technology for the production of translucent nanoemulsions
[J].
Designing and characterizing a multi-stepped ultrasonic horn for enhanced sonochemical performance
[J].
基于超声导波的螺栓轴向应力测量方法
[J].
Measurement method of bolt axial stress based on ultrasonic guided waves
[J].
CFD simulation of acoustic cavitation in a crude oil upgrading sonoreactor and prediction of collapse temperature and pressure of a cavitation bubble
[J].
大功率夹心式压电换能器结构参数计算分析及设计
[J].
Design and structural parameters calculation analysis of a high power sandwich piezoelectric transducer
[J].
四激励二维正交复合夹心式压电超声换能器的设计
[J].
Design of 2D orthogonal composite sandwich piezoelectric ultrasonic transducer excited by four piezoelectric stacks
[J].
柔性可穿戴压电超声传感器研究进展
[J].
Research progress on flexible wearable piezoelectric ultrasound transducers
[J].
纵扭复合超声换能器的频率灵敏度及其结构优化研究
[J].
Study on frequency sensitivity and structure optimization of longitudinal-torsional composite ultrasonic transducer
[J].
超声波振动农业触土部件变幅杆性能分析与试验
[J].
Performance analysis and experimental study on horn of ultrasonic vibration agricultural soil-engagement component
[J].
Design a novel ultrasonic horn using electro-mechanical circuit method with optimization algorithm
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}