


近年来,国内外诸多学者针对电机选型开展了广泛研究。胡卫平[4]通过直接计算轴承寿命试验机正常工作时关节轴承摩擦球副的摩擦转矩,实现了电机选型。李正国[5]通过计算测试轴承所需的转矩,并结合传动系统的传动比将其折算成电机所需提供的转矩,实现了电机选型。郭婷等[6]对穿戴式采摘菠萝装置进行了受力分析,计算了其采摘菠萝时的摩擦转矩以及掰断菠萝时的最大转矩,并以此为依据开展了电机选型。尚钱等[7]通过分析火车车轮抓取搬运机械抓手的运动特性来计算其所需的转矩,进而完成电机选型。符永映[8]通过计算橡胶履带底盘行走机构工作时的牵引力来进行电机选型。王洲亚等[9]结合高海拔气压、温度和空气湿度的变化,对水泥厂循环水泵的配套电机进行了选型设计。王子坤等[10]通过计算车轮行驶过程中的总阻力,实现了山药种植机的电机选型。Hwang等[11]通过计算负载与转速来确定口腔印模材料分配器的驱动电机型号。Bajrami等[12]根据电动汽车传动比对总能耗的影响,对其电机进行了选型设计。然而,上述电机选型方法主要针对特定类型的传动系统,未充分考虑过载转矩、转动惯量等动态指标的影响,并不适用于轴承寿命试验机的电机选型。
为此,本文针对自主设计的轴承寿命试验机,提出了一种基于曲柄摇杆机构效率分析并综合考虑过载转矩、转动惯量等参数匹配的电机选型方法。同时,结合虚拟样机仿真及物理样机实验来验证电机选型结果的合理性和可靠性,旨在为同类装备的电机选型提供参考。
1 轴承寿命试验机结构原理
根据行业标准JBT 14003—2020《关节轴承 PTFE织物衬垫型自润滑轴承》,在对PTFE(polytetrafluoroethylene,聚四氟乙烯)自润滑关节轴承开展寿命试验时,轴承寿命试验机需要对测试轴承施加规定的径向载荷,并使其内圈进行-30°~+30°的连续往复摆动,摆动频次为70 次/min。当测试轴承外圈表面温度大于150 ℃或衬垫磨损量大于0.30 mm时,试验终止。
基于JBT 14003—2020设计的轴承寿命试验机由三相异步电机、减速器、输入转轴、曲柄摇杆机构、输出转轴、动态转矩传感器和液压千斤顶(图中未标出)等组成,其结构如图1所示。在开展轴承寿命试验时,由液压千斤顶对测试轴承施加径向载荷,三相异步电机经减速器驱动曲柄摇杆机构,曲柄摇杆机构通过输出转轴带动测试轴承内圈作角度为-30°~+30°、频次为70 次/min的往复摆动。
图1
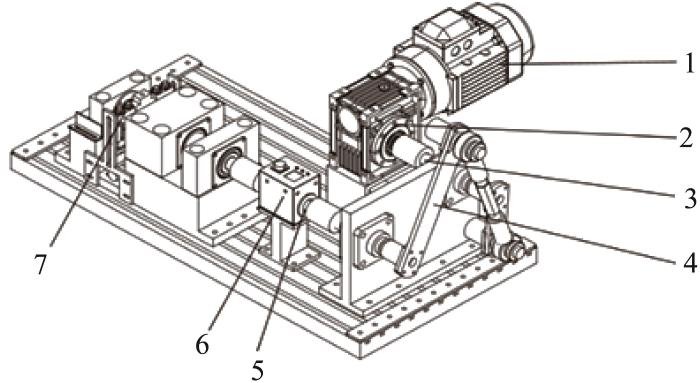
图1
轴承寿命试验机总装
1—三相异步电机;2—减速器;3—输入转轴;4—曲柄摇杆机构;5—输出转轴;6—动态转矩传感器;7—测试轴承。
Fig.1
Total assembly of bearing life testing machine
为保证轴承寿命试验机满足设计要求,在进行三相异步电机选型时,不仅要充分考虑电机的功率、转速等静态指标,还应考虑电机的转动惯量、过载转矩等动态指标。基于此,本文以曲柄摇杆机构的平均传动效率为切入点,综合考虑电机的静态指标和动态指标,对轴承寿命试验机的电机选型方法进行研究。
2 曲柄摇杆机构传动效率分析
2.1 理论分析
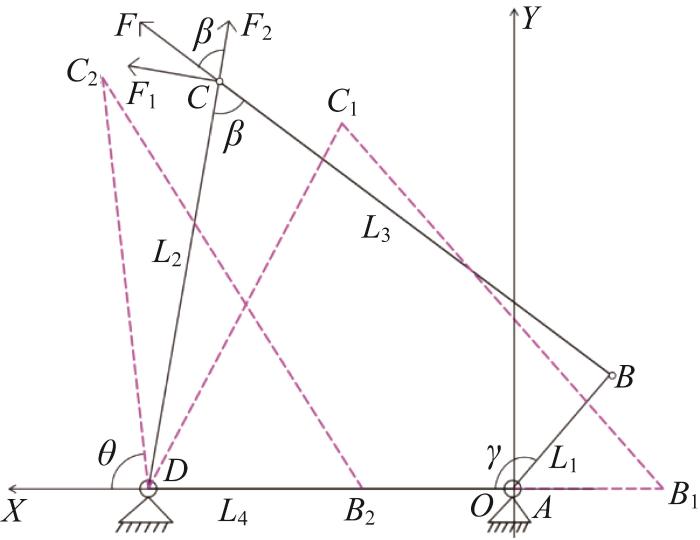
在曲柄摇杆机构中,连杆与摇杆之间所夹的锐角或直角为传动角,当两者的夹角为钝角时,传动角为对应的补角。传动角是判断机构性能的核心参数,也是影响机构传动效率的关键因素[13-14]。当传动角为90°时,机构的传动性能最优。以机架与曲柄的铰接处为原点,机架方向为X轴正方向,建立平面直角坐标系,如图2所示。图中:F为连杆作用于摇杆的合力;L1为曲柄长度,L2为摇杆长度,L3为连杆长度,L4为机架长度;γ为曲柄与机架间的夹角(曲柄转角),β为连杆与摇杆间的夹角(本文β<90°,即β为传动角)。该机构的最小传动角βmin出现在曲柄AB与机架AD重叠时(即γ=0°);最大传动角βmax出现在曲柄AB与机架AD共线时(即γ=180°)。当曲柄摇杆机构的传动角增大时,连杆作用于摇杆切线方向上的分力F1增大,机构的瞬时传动效率随之提高[15-16]。
图2
1)曲柄摇杆机构的瞬时传动效率计算。
根据图2和曲柄摇杆机构的尺寸参数,机架末端D点的坐标为(L4, 0),曲柄与连杆铰接处B点的坐标为(L1cos γ, L1sin γ)。设连杆与摇杆铰接处C点的坐标为(x, y),在曲柄摇杆机构传动过程中,始终满足以下约束方程:
由
在曲柄摇杆机构运动过程中,连杆与摇杆应始终满足以下约束条件:
其中:
联立
当曲柄转动时,连杆作用于摇杆切线方向上的分力F1=Fsin β,F1用于驱动摇杆作往复摆动,为有效分力。定义曲柄摇杆机构的瞬时传动效率ηs为:
2)曲柄摇杆机构的平均传动效率计算。
复合辛普森公式是一种高精度的数值积分方法,常用于计算定积分
根据传动角β与曲柄转角γ间的函数关系,基于复合辛普森公式对γ进行积分,联立
式中:N为区间等分数,用于控制积分拟合精度,取N=360;h为步长,即分点间隔,取h=π/180°。
在本文所设计的轴承寿命试验机中,曲柄摇杆机构的尺寸参数如下:L1=100 mm,L2=270 mm,L3=320 mm,L4=240 mm。将上述参数代入
2.2 仿真验证
为验证上述理论分析结果的正确性,建立曲柄摇杆机构的虚拟样机模型。定义重力方向为沿y轴向下,在机架与大地间添加固定副,在曲柄与机架、连杆与曲柄、摇杆与连杆以及摇杆与机架间添加转动副,并在机架与曲柄间的转动副上添加旋转驱动,如图3所示。
图3
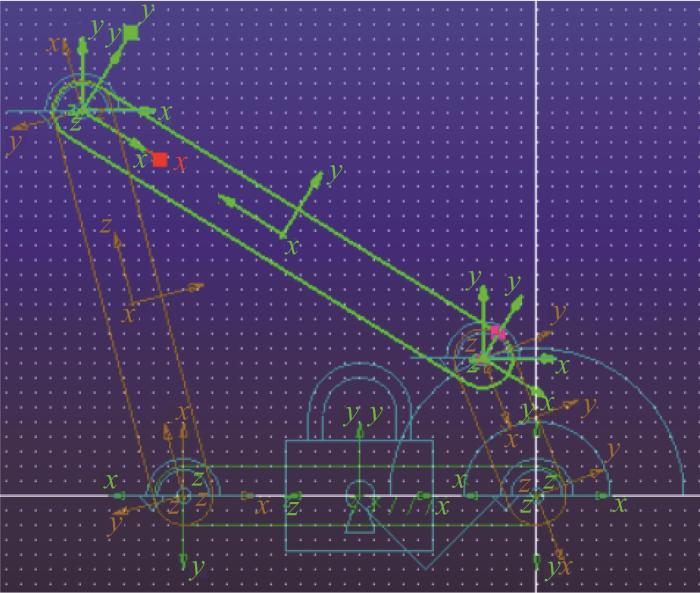
基于曲柄摇杆机构虚拟样机模型完成仿真分析,提取曲柄摇杆机构的输入转矩及输出转矩,并利用积分工具进行积分计算,结果如图4所示。
图4
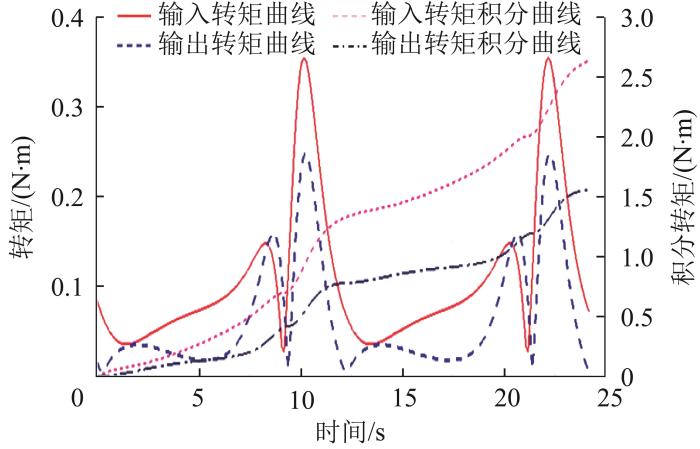
图4
曲柄摇杆机构的输入、输出转矩及其积分曲线
Fig.4
Input and output torques and their integral curves of crank-rocker mechanism
由图4可知,曲柄摇杆机构输入转矩积分曲线的终点坐标为(24 s,2.624 N·m),输出转矩积分曲线的终点坐标为(24 s,1.584 N·m)。通过求输入转矩与输出转矩积分结果的比值,计算得到曲柄摇杆机构的平均传动效率η1=60.4%,近似等于理论分析结果62.8%,两者的相对误差仅为3.82%,符合设计要求。
3 电机选型
3.1 电机功率测算
电机功率直接影响轴承寿命试验过程的稳定性以及试验数据的准确性。若电机功率与轴承寿命试验机不匹配,则会增大试验的风险系数,且会缩短试验机的使用寿命[18]。因此,须结合测试轴承参数、试验载荷及试验转速等要求,综合选择功率合适的电机并留有一定余量,以匹配轴承寿命试验机。
根据轴承寿命试验机的试验要求,每次试验仅对单个轴承进行寿命测试,则测试轴承在径向载荷作用下作往复摆动时所需的转矩Mt为:
式中:dk为摩擦副球径,μ为摩擦系数,Q为承载的最大径向载荷。
对测试轴承进行试验时,在电机输出转矩传递至测试轴承的过程中,会受到曲柄摇杆机构、弹性联轴器及支承轴承等多个部件的影响,则输入转轴的转矩M1可表示为:
式中:η1为曲柄摇杆机构效率,η2为支承轴承效率,η3为弹性联轴器效率,η4为其他运动副效率。
此外,在曲柄摇杆机构运动过程中,振动、急回特性、材料缓冲等因素会引发动态的传动损耗,应引入修正系数kV[19]。根据功率
式中:n为输入转轴的转速。
测试轴承初选GE50ET-2RS型PTFE自润滑向心关节轴承,其参数如表1所示。
表1 GE50ET-2RS型PTFE自润滑向心关节轴承参数 (mm)
Table 1
| 参数 | 数值 |
|---|---|
| 内径din | 50 |
| 外径dout | 75 |
| 内球宽度win | 28 |
| 外圈宽度wout | 35 |
| 摩擦副球径dk | 66 |
已知测试轴承所承受的最大径向载荷Q=5.0×104 N,摆动频次为70 次/min;各部件的效率分别取η1=62.8%、η2=97%、η3=98%、η4=95%,修正系数kV=1.2;测试轴承正常磨损时的摩擦系数μ=0.05。将上述参数分别代入
3.2 电机转动惯量测算
惯量比K(轴承寿命试验机与电机的转动惯量之比)是影响电机选型的重要参数:K过大会导致试验机响应迟缓;K过小会导致试验机的载荷波动较大。一般情况下,当惯量比满足1<K≤5时,轴承寿命试验机处于良好的响应状态[20]。
1)试验机转动惯量测算。
轴承寿命试验机的主要运动部件包括曲柄、摇杆、连杆、输入转轴、输出转轴以及与测试轴承配合的测试转轴。其中,输入转轴、输出转轴、测试转轴均可等效为实心圆柱件,其转动惯量Jc可表示为:
式中:mc为实心圆柱件的质量,R为实心圆柱件的半径。
曲柄、连杆和摇杆均可等效为细长杆件,其转动惯量Jr可表示为:
式中:mr为细长杆件的质量,L为细长杆件的长度。
基于上述参数的实际取值,计算轴承寿命试验机各部件的转动惯量,结果如表2所示。
表2 轴承寿命试验机各部件的转动惯量
Table 2
| 部件 | 质量/kg | 半径或杆长/m | 转动惯量/(kg·m2) |
|---|---|---|---|
| 输入转轴 | 3.47 | 0.015 | 0.000 390 375 |
| 输出转轴 | 4.89 | 0.015 | 0.000 550 125 |
| 测试转轴 | 8.32 | 0.025 | 0.002 600 000 |
| 曲柄 | 2.08 | 0.100 | 0.006 933 333 |
| 摇杆 | 2.97 | 0.270 | 0.072 171 000 |
| 连杆 | 4.35 | 0.320 | 0.148 480 000 |
轴承寿命试验机中的其他零件(包括螺栓、键等连接零件)的转动惯量可忽略不计。因此,轴承寿命试验机的总转动惯量J总
2)惯量比测算。
电机在工作时通常需要配合减速器工作,轴承寿命试验机的负载转动惯量经减速器传递到电机的转动惯量J折为:
式中:i为传动比。
则试验机与电机的惯量比K可表示为:
式中:J减为减速器的转动惯量,J电为电机的转动惯量。
3.3 电机过载转矩测算
电机的过载转矩是指电机在短时间内承受超出额定转矩的负载而不发生损坏时所能输出的最大转矩,是评价电机性能的重要指标[21]。
1)试验机启动时的过载转矩测算。
在轴承寿命试验机启动时,电机除了需要提供保证试验机正常运转所需的动力外,还需要提供试验机在设定时间内启动所需的加速转矩。加速转矩M启的计算式如下:
式中:
试验机的启动时间为0.05 s,正常工作转速为70 r/min,将其代入
2)测试轴承临近失效时的过载转矩测算。
在测试轴承连续工作的过程中,其外圈内表面的自润滑织物不断磨损,导致其摩擦系数不断增大,则其所需的转矩随之增大。当测试轴承临近失效时,临界摩擦系数按0.1进行测算,将其代入
在轴承寿命试验机工作过程中,电机的过载转矩需大于试验机的最大过载转矩,即M过≥max(M启, M失)。
3.4 电机选型
根据上述测算结果,轴承寿命试验机的电机初选为YE3-90L-4型三相异步电机,其参数如表3所示。
表3 YE3-90L-4型三相异步电机参数
Table 3
| 参数 | 数值 |
|---|---|
| 额定功率/kW | 1.5 |
| 额定转速/(r/min) | 1 400 |
| 额定转矩/(N·m) | 10.23 |
| 过载系数 | 1.8 |
| 转动惯量/(kg·m2) | 2.1×10-4 |
| 传动效率/% | 85.3 |
为保证试验机工作转速为70 r/min,电机需要配合传动比i=20的减速器使用。本文选用的减速器的型号为WLMD2-N70-P1D5,其传动效率η减=97%,转动惯量J减=3.2×10-4 kg·m2。该减速器的外观如图5所示。
图5

图5
YE3-90L-4型三相异步电机与WLMD2-N70-P1D5型减速器
Fig.5
YE3-90L-4 type three-phase asynchronous motor and WLMD2-N70-P1D5 type reducer
对于电机的工作转矩,当轴承寿命试验机正常工作时,电机经减速器传动后所提供的额定转矩应大于试验机的负载转矩M1。因此,三相异步电机经减速器传动后所能提供给输入转轴的额定转矩M2为:
将各参数的数值代入(15)计算,可得M2=169.32 N·m。由此可知,M2>M1且留有余量,满足向心关节轴承寿命试验的要求。
对于电机的转动惯量,将三相异步电机与减速器等的相关参数代入
由
对于过载转矩,YE3-90L-4型三相异步电机的过载系数为1.8,经减速器传动后的额定转矩M2=169.32 N·m,则可得M过=M2×1.8=304.78 N·m,M过>M失,表明电机的过载转矩满足要求且留有余量。
综上,选择YE3-90L-4型三相异步电机并配合WLMD2-N70-P1D5型减速器,能够满足本文轴承寿命试验机的要求。
4 实验验证
本文所搭建的轴承寿命试验机物理样机如图6所示。通过变频器改变试验机的转速,并利用动态转矩传感器记录不同转速下输出转轴的转矩。同时,在试验机上安装温度传感器、圈数记录器及压力传感器,分别记录测试轴承的工作温度、工作圈数和所施加的压力。
图6
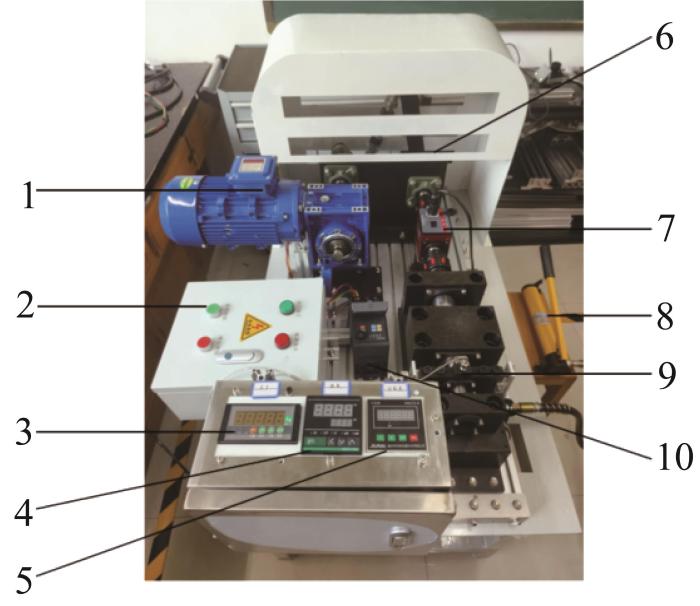
图6
轴承寿命试验机物理样机
1—三相异步电机;2—电控箱;3—压力传感器;4—温度传感器;5—圈数记录器;6—曲柄摇杆机构;7—动态转矩传感器;8—液压千斤顶;9—测试轴承;10—变频器。
Fig.6
Physical prototype of bearing life testing machine
本文选择哈尔滨哈中轴承有限公司生产的内径为50 mm的GE50ET-2RS型PTFE自润滑向心关节轴承为测试轴承;选用无锡晨博机电有限公司生产的320-1.5G3型变频器(额定功率为1.5 kW,额定电流为3.8 A);选用蚌埠大洋传感系统工程有限公司生产的DYN-200型动态转矩传感器(额定电压为24 V,脉冲为1 200 Hz/r),与配套的转矩测量系统进行实时通信,利用输出信号生成转矩变化曲线。
利用液压千斤顶分别对测试轴承施加不同的径向载荷,通过动态转矩传感器测量输出转轴转矩的波动情况,以验证所选电机是否符合轴承寿命试验机的要求。若电机功率过大,则输出转轴的转矩波动较大;若电机功率过小,则试验机启动困难且振动较为明显。在测试过程中,同步测量电机外壳温度,观察电机外壳温升是否符合标准。
在室温为22 ℃的工作环境中,使用液压千斤顶对测试轴承分别施加18、35、50 kN的径向载荷,令轴承寿命试验机连续工作1 h,并利用动态转矩传感器记录不同时刻下输出转轴的转矩。截取任意时间段内输出转轴的转矩波动曲线,如图7所示。
图7
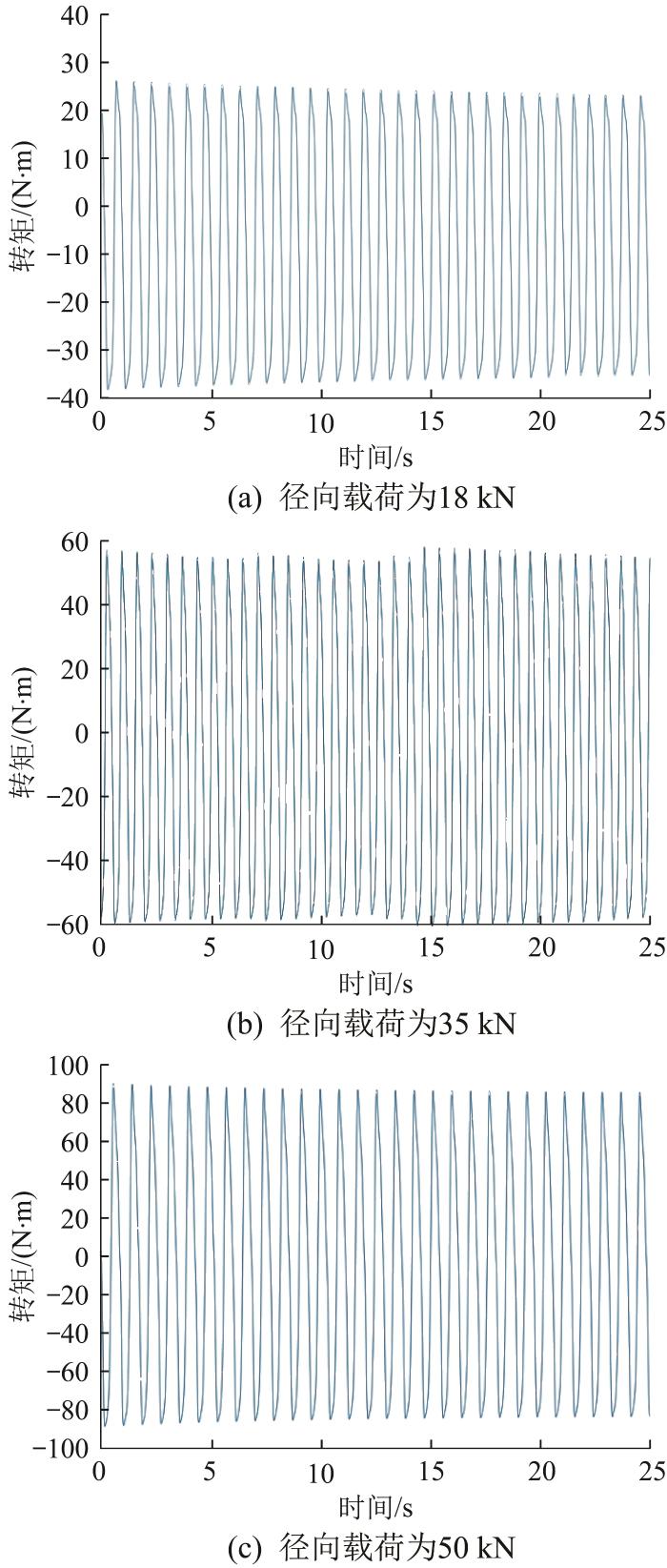
图7
不同径向载荷下输出转轴的转矩波动曲线
Fig.7
Torque fluctuation curves of output shaft under different radial loads
由图7可知,测试轴承在18、35、50 kN的径向载荷下工作1 h后,轴承寿命试验机中输出转轴的转矩分别稳定在33、60、88 N·m左右,符合轴承寿命试验要求。
在轴承寿命试验机工作过程中,同步测量电机外壳温度变化情况,如图8所示。
图8
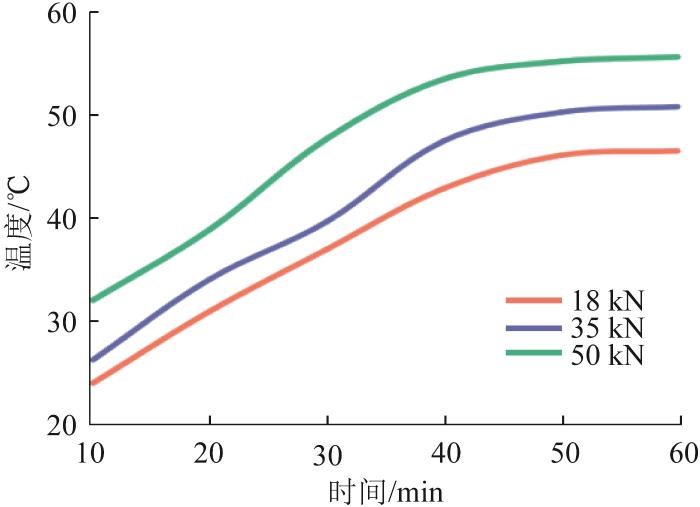
由图8可知,在轴承寿命试验机连续工作的1 h内,不同径向载荷工况下电机外壳的温度逐渐上升并最终趋于平稳,最高温度均未超过55 ℃。
综上,本文选择的YE3-90L-4三相异步电机能够满足轴承寿命试验机的试验要求:试验机工作时的输出转矩变化稳定,且三相异步电机外壳的温度变化满足电机绝缘等级允许的温升限值。
5 结 论
本文针对轴承寿命试验机的电机选型问题,提出了一种结合曲柄摇杆机构效率分析、动态指标匹配与实验验证的电机选型方法。通过理论推导与仿真验证,确定了曲柄摇杆机构的平均传动效率为62.8%,为电机参数测算提供了可靠依据。综合考虑电机的功率、负载转动惯量及过载转矩,选定YE3-90L-4型三相异步电机,其额定转矩、过载系数及惯量比均满足向心关节轴承寿命试验的要求。结果表明,在不同径向载荷工况下,轴承寿命试验机的输出转矩稳定,且电机外壳的温度变化符合绝缘标准,验证了所选电机的合理性和可靠性。研究结果为高精度、高可靠性轴承寿命试验机的电机选型提供了系统性的解决方案,具有一定的工程参考价值。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.200
参考文献
自润滑关节轴承磨损寿命研究方法现状与展望
[J].
Status and prospect of research methods on wear life of self-lubricating spherical plain bearing
[J].
基于多体动力学的折边机电机选型及实验验证
[J].
Motor selection and experimental verification of CNC bending machine based on multi body dynamics
[J].
Development and perspectives of bearing life testers
[J].
关节轴承摆动寿命试验机设计及其优化
[D].
Design and optimization of swing life testing machine for spherical plain bearings
[D].
复合摆动式关节轴承加速寿命试验机的研制及试验研究
[D].
Development of the spherical plain bearing accelerated life tester under composite oscillating condition and experimental study
[D].
新型穿戴式辅助人工采摘菠萝装置设计
[J].
Design of new wearable manual-assisted pineapple-picking device
[J].
火车车轮抓取搬运机械手电机选型及动力学仿真
[J].
Motor selection and dynamic simulation of train wheel grasping and carrying manipulator
[J].
橡胶履带底盘行走机构选型设计计算
[J].
Type selection, design and calculation of walking mechanism of rubber crawler chassis
[J].
高海拔水泥厂循环水泵及配套电机选型设计
[J].
Selection and design of circulating water pump and matching motor for high-altitude cement plant
[J].
一种新型山药种植机的设计
[J].
Design of a new type of Chinese yam planter
[J].
A methodological approach for motor selection in dental impression material dispensers using experimental and image analysis techniques
[J].
A proposal for a simplified systematic procedure for the selection of electric motors for land vehicles with an emphasis on fuel economy
[J].
曲柄摇杆机构设计研究
[D].
Research on crank rocker mechanism design
[D].
变参数曲柄摇杆机构的传动特性分析
[J].
Analysis on transmission characteristics of crank rocker mechanism with variable parameters
[J].
基于曲柄摇杆机构的仿生海扁虫水下机器人
[J].
Bionic flatworm underwater robot based on crank and rocker mechanism
[J].
空间曲柄摇杆机构极限位置综合的几何方法
[J].
Geometric method for limit positions synthesis of the spatial crank-rocker mechanism
[J].
Simpson's quadrature formula for third differentiable and s-convex functions
[J].
配套电机功率对磁力泵效率影响
[J].
Influence of supporting motor power on efficiency of magnetic drive pump
[J].
数控机床二质量伺服系统惯量匹配研究
[J].
Research on inertia matching of two-mass servo system of CNC machine tool
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}