


目前,车辆轮毂自动化检测大多通过构建车辆动力学模型完成控制系统的设计与仿真,并在转鼓台架上复现真实行驶工况以开展验证,最终实现轮毂性能检测[8]。在车辆轮毂检测过程中,速度跟踪不仅依赖反馈控制,还涉及对未来动态行为的准确预测。传统的速度控制算法,如PID(proportional-integral-derivative,比例-积分-微分)控制[9]、模型预测控制[10]和滑模控制[11]等,通常基于已知的车辆动态行为进行实时响应,但对于未知情况或干扰因素较多等复杂环境下的速度跟踪存在明显不足。构建车辆纵向动力学模型可提前考虑车辆可能会遇到的各种情况,进而实现对未来动态行为的精准预测。这种预测能力对于提高自动化检测效率至关重要。
现阶段,车辆轮毂自动化检测主要以提前预制的标定表作为车辆静态模型,通过查表的方式完成检测。这种方法虽能在短时间内实现良好的速度跟踪效果,但随着时间的推移,车辆轮毂产生的磨损和环境干扰的变化会导致跟踪误差越来越大。为解决这一问题,国内外学者基于物理模型、强化学习算法[12]以及其他深度学习算法等开展了大量研究。例如:Vacheva等人[13]提出了永磁同步电机的数学和物理模型,并基于该模型对电动汽车的各种动态运行模式进行了仿真模拟和实验研究。Feng等人[14]利用DDPG(deep deterministic policy gradient,深度确定性策略梯度)算法实现了车辆速度跟踪控制。但上述方法均存在一定的缺陷,比如强化学习算法依赖高质量仿真环境,难以在真实驾驶环境下实现高效训练和优化[15],而传统物理模型无法精准拟合车辆的复杂非线性动力学关系,难以适应高精度检测场景。
近年来,深度学习技术迅速发展,为车辆轮毂自动化检测提供了新的解决方案。作为一种强大的数据驱动模型,深度学习模型能够快速处理大量数据并自动提取复杂特征,从而提升预测精度[16]。相比于物理模型和强化学习算法,深度学习算法无需依赖精确的物理参数和训练环境,即可通过学习标定表数据之间的规则,还能不断学习检测过程中动态数据的特征,有效弥补了因磨损和外部环境因素变化而导致的跟踪误差,提高了检测效率。
基于此,本文根据标定表数据搭建车辆纵向控制模型,并提出了一种结合卷积神经网络(convolutional neural network, CNN)、双向长短期记忆网络(bidirectional long short-term memory, BiLSTM)和注意力机制(attention mechanism, AM)的混合深度学习模型。相较于传统的物理模型,该模型具有较强的灵活性和可扩展性;相较于单一的深度学习模型,该模型通过融合不同深度学习模型,能够更好地捕捉标定表数据之间复杂的非线性动力学特性;与强化学习算法高度依赖环境条件相比,该算法对环境的要求较低,可有效提升跟踪精度与检测效率。
1 车载辅助驾驶机器人系统组成
车载辅助驾驶机器人系统主要包括视控一体控制器、电机和传感器等设备。其中,电机选用无锡信捷电气股份有限公司生产的MS6H-80CM30B3-21P0型交流伺服电机,其额定功率为1 000 W,额定转速为3 000 r/min,最高转速为5 000 r/min,额定转矩为3.18 N∙m,工作频率为250 Hz。
车辆轮毂检测在转鼓台架上开展。待检测车辆轮毂如图1所示。选用直径为406.4 mm、宽度为177.8 mm、孔距为114.3 mm(共5个安装孔)、偏距为40~50 mm、中心孔直径为57.1~66.1 mm的铝合金铸造轮毂进行检测;轮胎型号选择家用车市场中具有较高代表性的215/60R16。
图1

试验车(纯电动汽车)通过车载辅助驾驶机器人完成驱动和制动控制动作的协调切换。机器人采用伺服电机驱动的方式精确控制驱动/制动开度,以满足汽车加速(驱动开度)、恒速及减速(制动开度)等运动的要求。驱动机械腿与制动机械腿是机器人系统的关键执行部件,其在伺服电机的驱动下,通过自动调节节气门开度与制动力矩的大小来实现对驱动加速和制动减速的控制。驱动/制动机械腿与踏板之间的连接机构简图如图2所示。图中:杆PD表示踏板,杆DP1表示踏板连接杆,P1P2表示机械腿;θ1为踏板开度,θ2为踏板PD与踏板连接杆DP1的夹角,θ3为踏板连接杆DP1与机械腿P1P2的夹角。机械腿P1P2通过前后移动来控制踏板开度θ1的大小。
图2
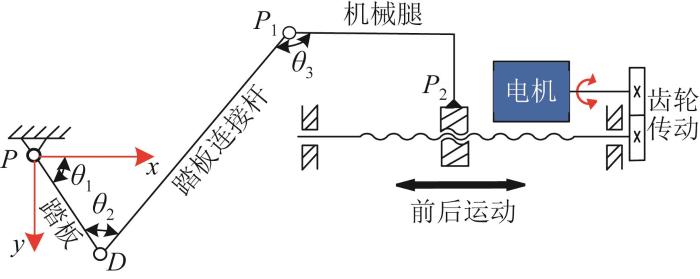
图2
驱动/制动机械腿机构简图
Fig.2
Schematic diagram of drive/brake mechanical leg mechanism
2 车辆纵向控制模型构建
本文以深度学习模型为基础,构建车辆纵向控制模型。深度学习模型的构建主要分为数据预处理、模型训练及模型评估三个阶段,如图3所示。在本文的模型训练过程中,输入为瞬时速度v和瞬时加速度a,预测输出为驱动/制动开度αacc、αbrk(驱动/制动开度为驱动/制动机械腿的当前位移与有效工作总行程的比值)。
图3
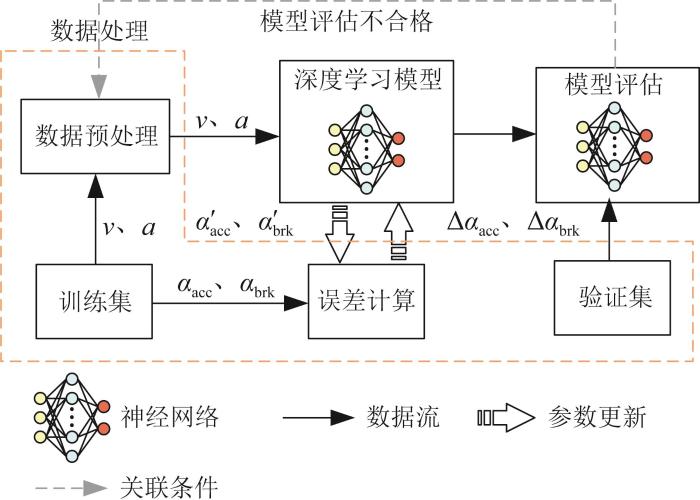
输入数据v、a通过深度学习模型的多层结构进行前向传播,生成预测值
2.1 数据预处理方法
为了确保模型训练的高效性和模型的稳定性,选用最小-最大归一化方法[17]对输入、输出数据进行预处理,便于后续的模型评估与分析。数据预处理步骤如下。
式中:
2.2 CNN-BiLSTM-AM模型架构
基于标定表的数据关系建模通常存在大量噪声干扰、缺乏有效学习特征等问题,同时预测模型应具备捕捉时序依赖关系的能力,而单一深度学习模型无法有效解决上述问题,故需采用融合多个深度学习模型的协同架构。
在捕捉时序依赖关系方面,BiLSTM具有显著优势。但由于存在数据噪声、缺乏有效学习特征以及无法动态区分关键时间步,BiLSTM无法实现高效的学习。鉴于CNN可快速提取较多的有效学习特征并抑制数据噪声,以及AM可通过自适应加权聚焦对预测贡献最大的历史特征,并能解决BiLSTM无法动态区分关键时间步的问题,本文选择CNN-BiLSTM-AM模型作为车辆纵向控制模型的核心架构。
图4
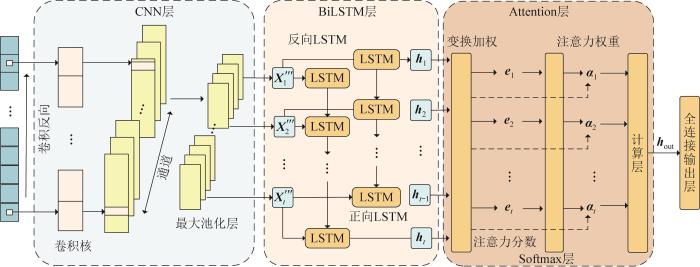
1)CNN层。
CNN层主要由输入层、卷积层及池化层等几部分组成,可用于时间序列的预测[19]。其中:卷积层通过在时间维度上滑动卷积核,对区域数据进行加权求和,从而提取局部特征;池化层通过最大池化操作来提取数据特征。卷积操作的计算公式如下:
式中:
2)BiLSTM层。
BiLSTM具有2个独立的LSTM网络结构,能同时正向和反向处理时序数据,从而有效地捕捉时序数据中的上下文信息。LSTM的内部结构如图5所示。
图5
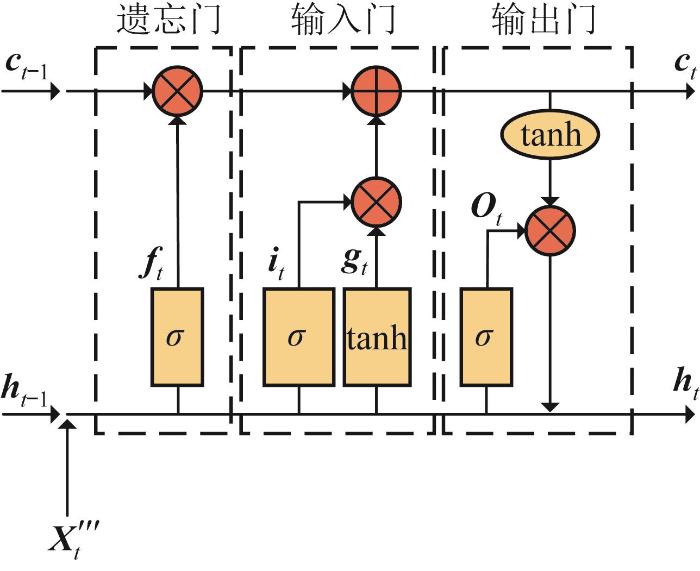
LSTM主要包括遗忘门
式中:
3)注意力感知决策层。
注意力感知决策层由Attention层和全连接输出层组成,其利用多头注意力机制将高维数据映射到多个子空间,每个子空间均有独立的查询向量 Q 、键向量 K 和值向量 V。先通过 Q 和 K 计算注意力权重,再利用这些权重与 V 加权求和,以学习不同的特征表示,最后将这些特征合并输入到全连接输出层进行最终预测。多头注意力机制的结构如图6所示。
图6
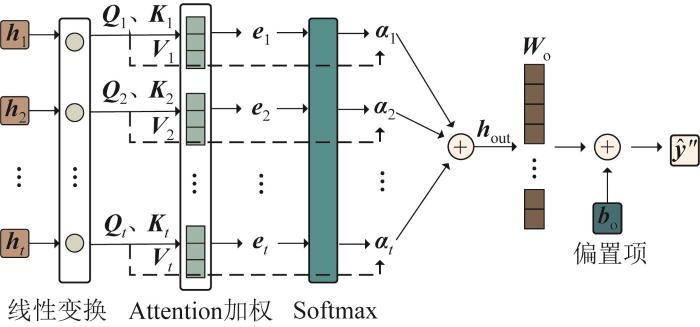
注意力感知决策层的具体计算步骤如下。
式中: WQ、 WK、 WV为 Q 、 K 和 V 对应的映射权重矩阵。
式中:H为子空间内键向量 K 的维度。
式中:T为数据序列总长度。
2.3 CNN-BiLSTM-AM模型训练流程
CNN-BiLSTM-AM模型在工程上的实现难度虽处于可控范围内,但由于该模型复杂度较高,易造成计算资源浪费。为实现计算资源的最大化利用,以及避免小批次噪声和训练过程中的过拟合问题,在CNN-BiLSTM-AM模型训练过程中,加入早停机制:若模型在训练集上的误差远小于在验证集或测试集上的误差,则说明出现过拟合现象,须中断训练。鉴于CNN-BiLSTM-AM模型在训练150轮后易出现过拟合现象,故将训练轮数设置为200轮。此外,为适配CNN-BiLSTM-AM模型长时序建模的功能需求以及一维时序数据的特性,卷积层与卷积核的设计选择单层单核,以确保在节约计算资源和抑制噪声的同时能保留关键的动态特征。CNN-BiLSTM-AM模型的超参数设置如表1所示。
表1 CNN-BiLSTM-AM模型超参数设置
Table 1
| 参数 | 数值 |
|---|---|
| 时间步长 | 100 |
| 卷积核数量 | 1 |
| CNN步长 | 1 |
| CNN层数 | 1 |
| CNN输出维度 | 128 |
| BiLSTM层数 | 2 |
| BiLSTM隐藏单元数 | 128 |
| 单次训练样本个数 | 128 |
| 学习率 | 0.001 |
| 训练轮数 | 200 |
| 损失函数阈值 | 0.018 |
| 过拟合容忍度 | 30 |
CNN-BiLSTM-AM模型的训练过程如图7所示。CNN-BiLSTM-AM模型将训练集分为多批次训练数据,并根据每批次数据更新模型参数。
图7
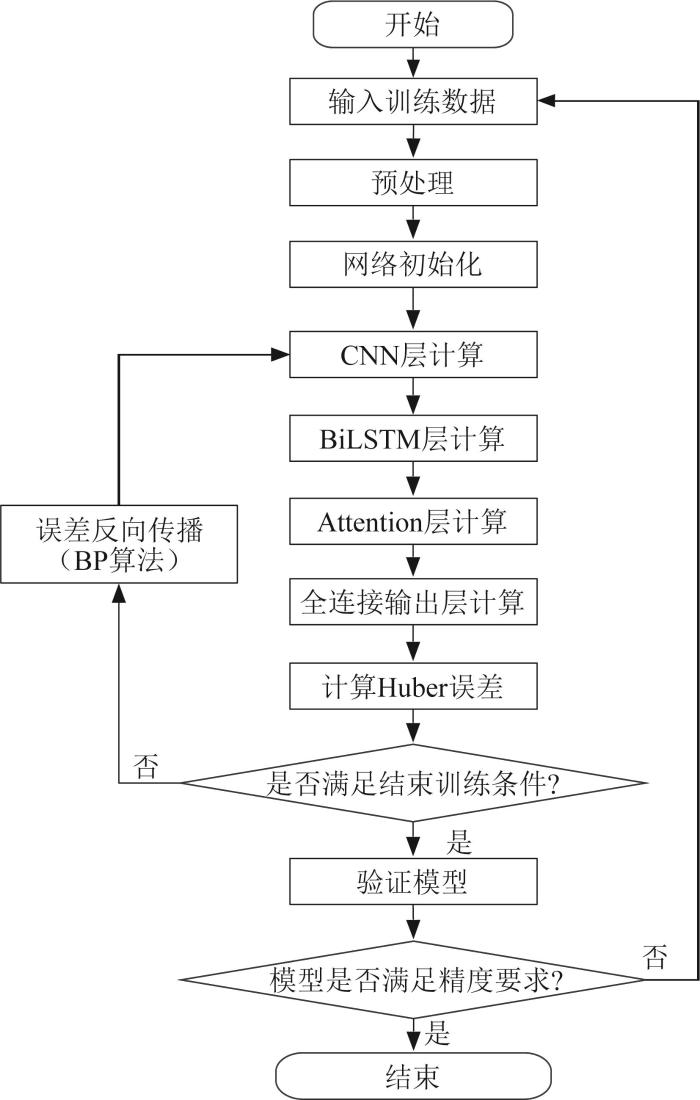
CNN-BiLSTM-AM模型训练的主要步骤如下:
在车辆轮毂自动化检测过程中,当车辆的硬件、所处环境发生显著变化或其他因素导致模型预测的开度误差连续2次高于10个百分点时,CNN-BiLSTM-AM模型会自动将最近一次的记录数据作为数据集以重新训练模型,从而提高检测精度。
3 结果分析
3.1 消融实验
1) 决定系数R2用于衡量模型预测精度,其计算公式如下:
式中:
2)MAE用于计算真实值与模型预测值之间绝对误差的平均值(用EMAE表示),其计算公式如下:
通过上述评价指标定量分析CNN-BiLSTM-AM模型的精度和性能,以进一步了解模型的泛化能力。
表2 消融实验中驱动开度预测结果
Table 2
| 模型 | R2 | EMAE/百分点 |
|---|---|---|
| CNN-AM | 0.873 4 | 4.024 |
| CNN-BiLSTM | 0.948 2 | 2.111 |
| BiLSTM-AM | 0.949 2 | 2.049 |
| CNN-BiLSTM-AM | 0.953 7 | 1.919 |
表3 消融实验中制动开度预测结果
Table 3
| 模型 | R2 | EMAE/百分点 |
|---|---|---|
| CNN-AM | 0.260 9 | 9.644 |
| BiLSTM-AM | 0.810 1 | 3.370 |
| CNN-BiLSTM | 0.892 7 | 2.651 |
| CNN-BiLSTM-AM | 0.966 6 | 0.923 |
消融实验结果表明,针对驱动开度和制动开度的预测,CNN-AM模型的决定系数分别为0.873 4、0.260 9,MAE分别为4.024、9.644个百分点,预测精度最低。在驱动开度预测精度方面,相较于CNN-AM模型,引入BiLSTM的CNN-BiLSTM模型的决定系数提升了8.56%,MAE降低了47.54%;BiLSTM-AM模型的决定系数提升了8.68%,MAE降低了49.08%;CNN-BiLSTM-AM模型的决定系数提升了9.19%,MAE降低了52.31%。在制动开度预测精度方面,BiLSTM-AM模型的决定系数较CNN-AM模型提升了210.5%,MAE降低了65.05%;CNN-BiLSTM模型的决定系数较BiLSTM-AM模型提升了10.20%,MAE降低了21.34%;CNN-BiLSTM-AM模型的决定系数较BiLSTM-AM模型提升了19.32%,MAE降低了72.61%。综合来看,在特征缺乏的制动开度预测任务中,CNN的引入使模型的决定系数提升了0.86%,MAE降低了5.87%;在整个预测任务中,AM的引入使模型的决定系数提升了0.58%,MAE降低了9.1%以上。
由此可知,CNN-BiLSTM-AM模型能够有效学习数据之间的非线性复杂动力学关系,在台架试验中具备更好的检测效果(在驱动开度预测任务中,该模型的决定系数较次优模型BiLSTM-AM提升了0.47%,MAE降低了6.34%;在制动开度预测任务中,该模型的决定系数较次优模型CNN-BiLSTM提升了8.28%,MAE降低了65.18%)。
3.2 仿真对比分析
针对车辆纵向控制模型的构建复杂度、训练成本与工程落地性,主流研究大多采用LSTM这类结构简洁、适配时间序列的模型作为核心架构。为进一步验证所提出的CNN-BiLSTM-AM模型的有效性与优越性,选取LSTM、GRU(gated recurrent unit,门控循环单元)、BiLSTM、RNN(recurrent neural network,循环神经网络)等模型作为对比模型,通过仿真对比分析各模型的预测性能。
图8
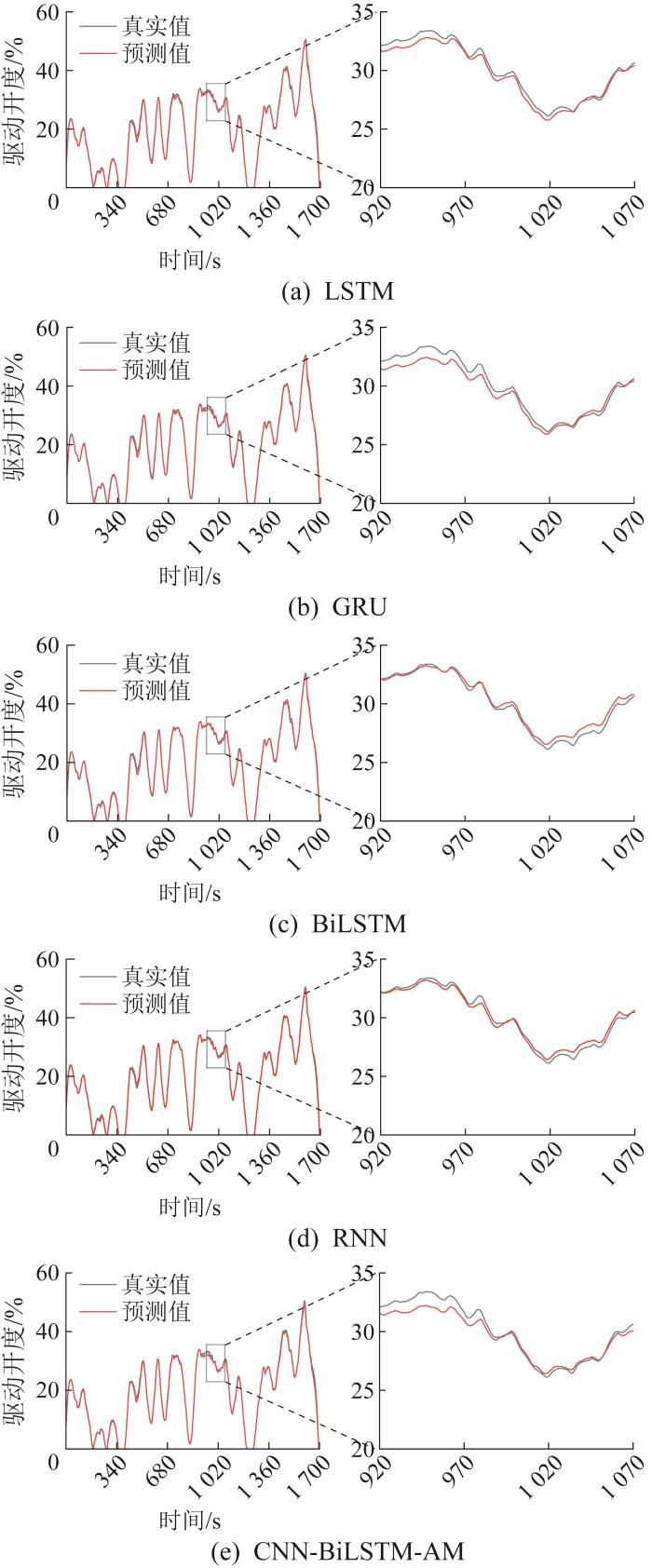
图8
基于不同模型的驱动开度预测结果对比
Fig.8
Comparison of drive opening prediction results based on different models
图9
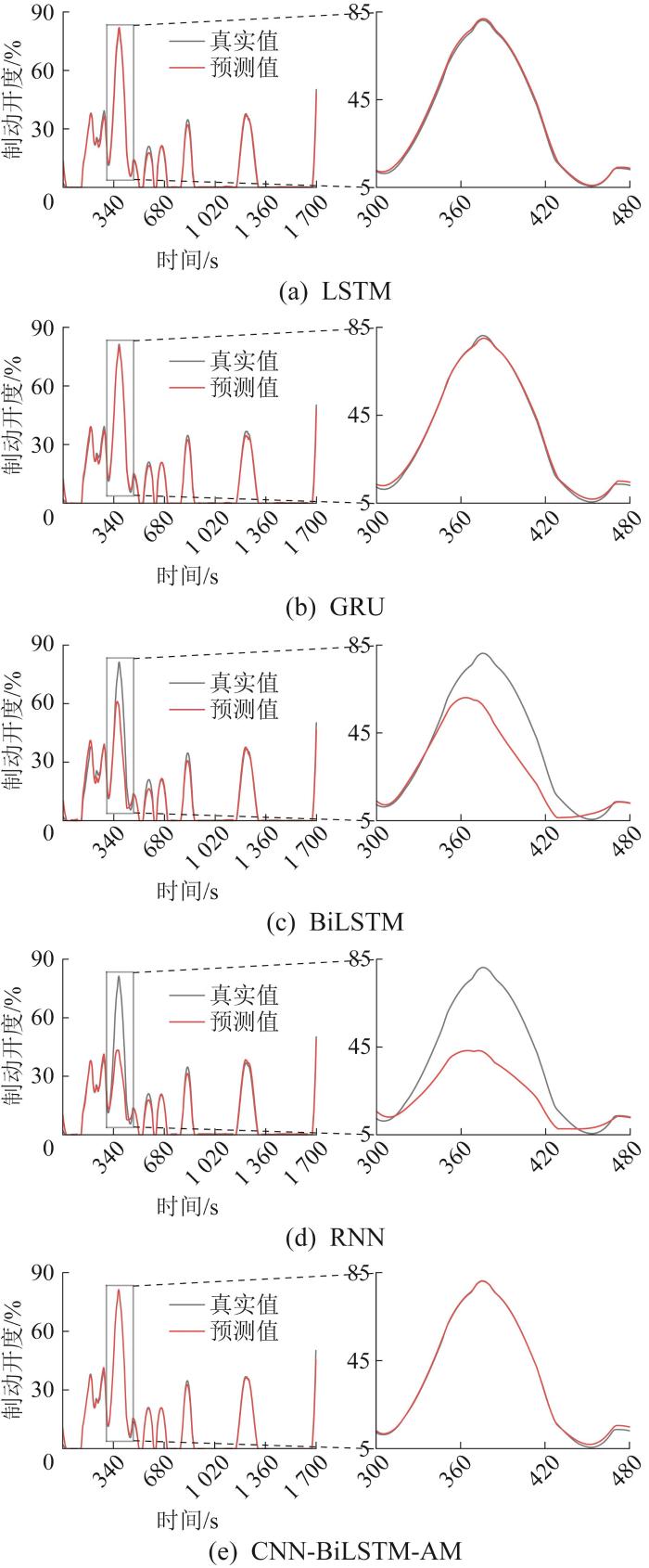
图9
基于不同模型的制动开度预测结果对比
Fig.9
Comparison of brake opening prediction results based on different models
针对驱动/制动开度的预测,上述5种模型的性能评价指标分别如表4和表5所示。由表4可知,在驱动开度预测方面,5种模型的预测精度差异不大,其中LSTM模型的预测精度最低,其决定系数较GRU和BiLSTM模型分别降低了0.42%和0.59%,MAE分别增大了0.81%和4.13%;CNN-BiLSTM-AM模型的预测精度最高,其决定系数较次优模型RNN提升了0.21%,MAE降低了4.38%。在制动开度预测方面,RNN模型的表现最差。GRU模型的决定系数较RNN模型提升了11.79%,MAE降低了46.80%;BiLSTM模型的决定系数较RNN模型提升了5.28%,MAE降低了20.71%;LSTM模型的决定系数较RNN模型提升了12.37%,MAE降低了49.27%;CNN-BiLSTM-AM模型的决定系数和MAE较次优模型LSTM分别提高了2.32%和20.04%。综上,无论是连续、平缓的驱动开度预测任务还是以突变时序为特征的制动开度预测任务,CNN-BiLSTM-AM模型的预测精度均比传统模型高(决定系数平均提升了3.17%,MAE平均降低了29.76%)。
表4 驱动开度预测结果评价指标
Table 4
| 模型 | R2 | EMAE/百分点 |
|---|---|---|
| LSTM | 0.945 0 | 2.094 |
| GRU | 0.949 0 | 2.077 |
| BiLSTM | 0.950 6 | 2.011 |
| RNN | 0.951 7 | 2.007 |
| CNN-BiLSTM-AM | 0.953 7 | 1.919 |
表5 制动开度预测结果评价指标
Table 5
| 模型 | R2 | EMAE/百分点 |
|---|---|---|
| RNN | 0.840 7 | 3.158 |
| BiLSTM | 0.885 1 | 2.504 |
| GRU | 0.939 8 | 1.680 |
| LSTM | 0.944 7 | 1.602 |
| CNN-BiLSTM-AM | 0.966 6 | 1.923 |
3.3 试验结果分析
为进一步验证CNN-BiLSTM-AM模型在实际轮毂检测中的有效性,在转鼓台架上固定试验车并搭建车辆轮毂检测平台,通过开展速度跟踪来验证CNN-BiLSTM-AM模型在真实车辆轮毂检测中的性能。试验车搭载辅助驾驶机器人,目标速度基于CLTC工况生成,分为低速(城市拥堵工况)、中速(郊区或普通城市工况)和高速(高速公路工况)三种情况,以模拟车辆不同的驾驶情景。车辆轮毂检测平台如图10所示。数据采集频率为20 Hz,通过车载传感器实时反馈转鼓转速信号,传感器的分辨率为0.01 km/h,绝对误差为
图10
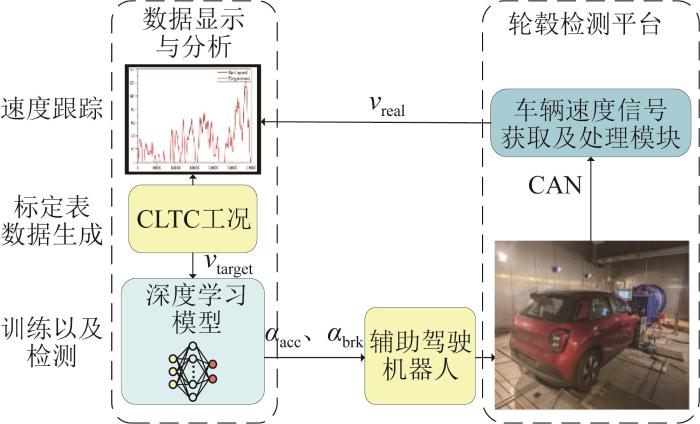
图11所示为实际车速与目标车速之间的关系。图中:黑色曲线为实际速度曲线,红色误差带是以目标速度曲线为中心、±2 km/h速度误差范围形成的。CLTC工况数据分为低速(0—9 000 s,速度为0~35 km/h)、中速(10 000—26 500 s,速度为0~75 km/h)和高速(27 000—36 000 s,速度为0~130 km/h)三个阶段并进行局部放大分析,以便直观地观察速度跟踪精度。
图11
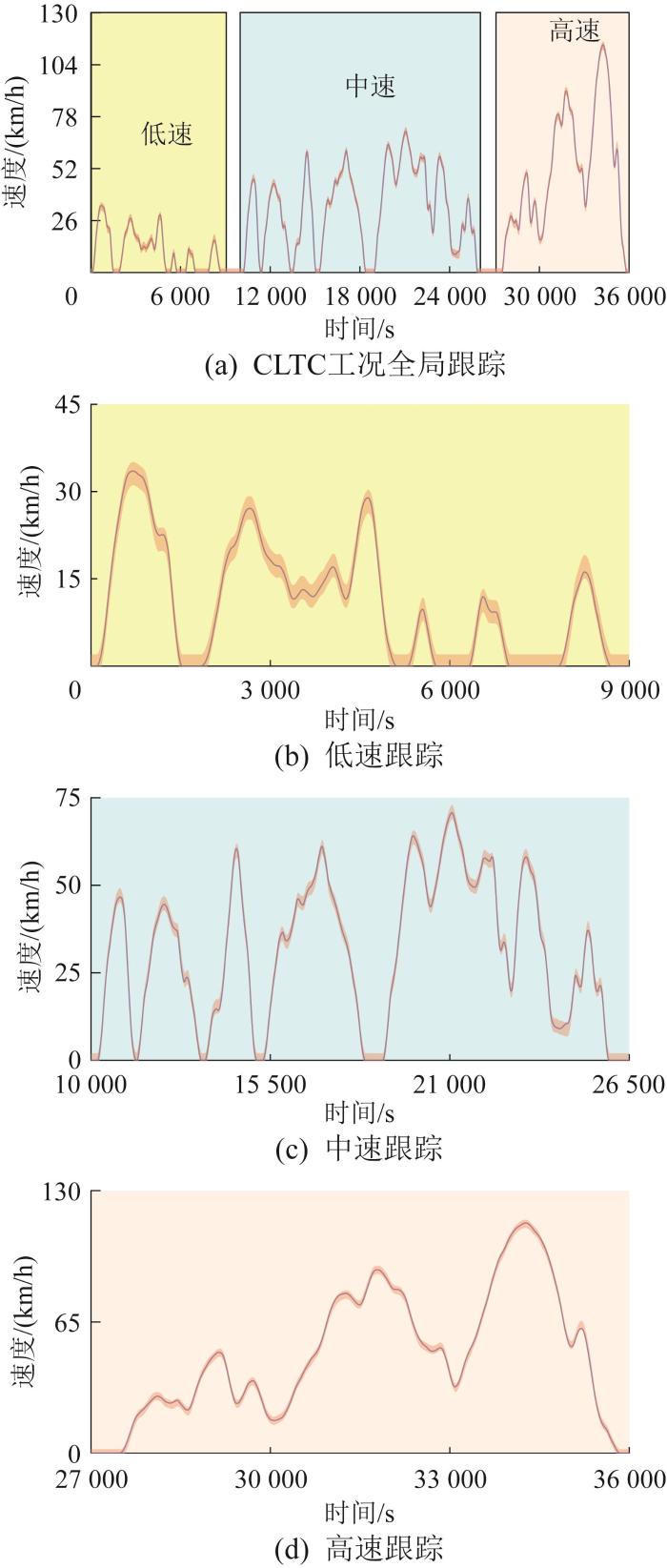
图12
4 总 结
本文针对现有车辆轮毂人工检测存在的效率低和精度不足的问题,提出了一种基于CNN-BiLSTM-AM模型的轮毂自动化检测方案。该模型通过CNN捕捉数据的空间相关性,从数据中提取局部深层特征并抑制噪声,再通过BiLSTM强大的建模能力和AM对不同数据特征自适应的权重分配能力,有效地实现了车辆速度的高精度纵向预测。
在CNN-BiLSTM-AM模型设计方面,CNN的引入使模型在特征缺乏的制动开度预测任务中的决定系数提升了0.86%,MAE降低了5.87%;AM的引入使模型在整个预测任务中的决定系数提升了0.58%,MAE降低了9.10%以上。在自动化控制方面,所提出的CNN-BiLSTM-AM模型不仅能够通过训练修正安装误差,还能实现动态自适应控制。当跟踪误差过大时,自动修正模型参数,以确保检测精度长期稳定。
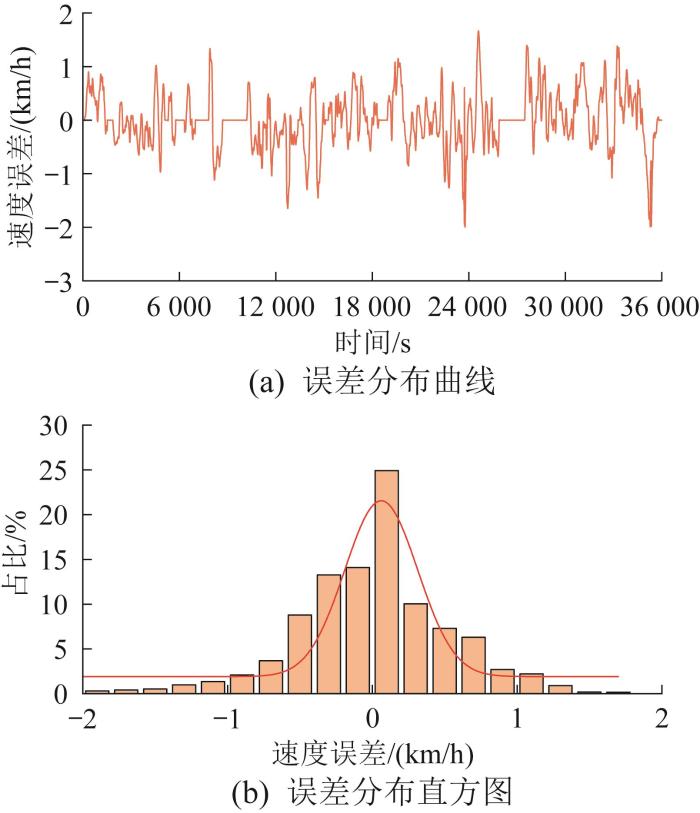
最后,搭建了车辆轮毂检测平台并对CNN-BiLSTM-AM模型的性能进行了验证。结果表明:CNN-BiLSTM-AM模型在低速、中速工况下能够实现精准的速度跟踪,跟踪误差控制在±1.5 km/h内;在高速工况下,跟踪误差在±2 km/h内,总体满足工业测试需求。测试结果验证了所提出的CNN-BiLSTM-AM模型能够降低传统检测方法对人工标定的依赖,可实现车辆轮毂的高效、高精度自动化检测。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.171
参考文献
Vehicle detection in driving simulation using extreme learning machine
[J].
橡胶改性酚醛树脂基摩擦片性能研究
[J].
Research on performance of rubber modified phenolic resin matrix friction plates
[J].
A high temperature engine materials test facility
[J].
发动机振动对排气歧管低周疲劳寿命影响研究
[J].
Study on the effect of engine vibration on low cycle fatigue life of exhaust manifold
[J].
Development of an innovative test machine for tyre, wheel and suspension systems for automotive and industrial vehicles
[J].
基于试验台架的轮胎测温系统研究
[J].
Research on tire temperature measurement system based on test bench
[J].
Programmed load spectrum for fatigue bench test of a vehicle body
[J].
Tracking control for high-speed train with coupler constraints
[J].
MPC-based path tracking with PID speed control for high-speed autonomous vehicles considering time-optimal travel
[J].
Equalization of lithium-ion battery pack based on fuzzy logic control in electric vehicle
[J].
Sliding mode control for sensorless speed tracking of PMSM with whale optimization algorithm and extended Kalman filter
[J].
Deep reinforcement learning-based feature extraction and encoding for finger-vein verification
[J].
Physical model of an electric vehicle for research of dynamic operating modes
[C]//
Vehicle speed tracking in bench test based on DDPG
[C]//
A compute-intensive service migration strategy based on deep reinforcement learning algorithm
[C]//
A novel approach for data feature weighting using correlation coefficients and Min-Max normalization
[J].
A CNN-BiLSTM-AM method for stock price prediction
[J].
基于CNN-LSTM-Attention模型的湿喷台车泵送系统堵管故障预测方法
[J].
Fault prediction method of pipeline blockage in wet spray trolley pumping system based on CNN-LSTM-Attention model
[J].
基于近红外光谱技术的眉茶拼配比例预测方法
[J].
Predicting the blending ratio of Mee Tea based on near infrared spectroscopy
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}