爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] 。吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性。与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] 。其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化。然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] 。尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力。
为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面。Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化。该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高。胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象。邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附。所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命。Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%。同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力。Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量。Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动。Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案。
针对上述问题,为降低轮式永磁吸附爬壁机器人运动过程中吸附力的波动幅度,以提高其运动稳定性,本文创新性地提出了一种双侧Halbach永磁轮。首先,基于磁偶极子理论与麦克斯韦应力张量法,构建双侧Halbach永磁轮的吸附力理论模型,并通过有限元分析验证其准确性。然后,构建评定永磁轮吸附性能的参数指标,重点分析内、外侧永磁轮间相对转角对吸附力调控效果的影响,并通过MATLAB软件开展数值仿真计算,以完成相对转角的优化。最后,搭建永磁轮吸附性能测试实验平台并开展永磁轮吸附力测试,以验证双侧Halbach永磁轮结构优化方案的有效性及其在实际应用中的可靠性。
1 双侧Halbach 永磁轮结构设计
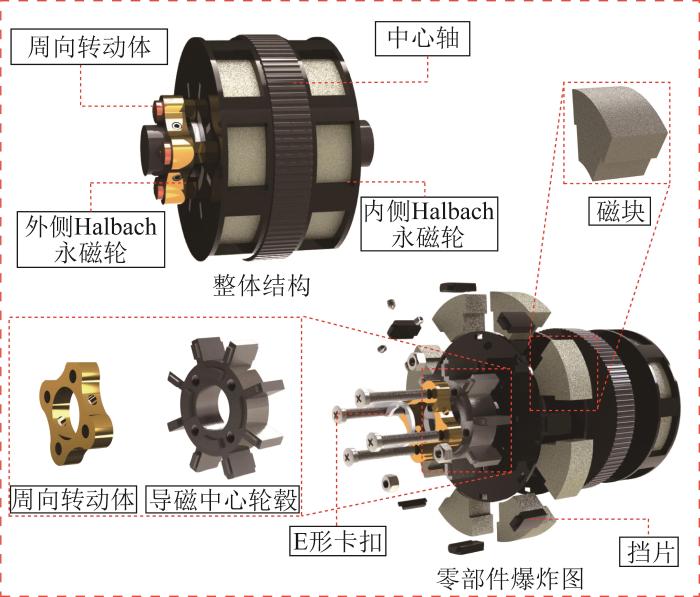
本文所设计的双侧Halbach永磁轮由内、外单侧Halbach永磁轮,中心轴及周向转动体三大部分组成。图1 所示为双侧Halbach永磁轮的整体结构及其零部件爆炸图。其中,内、外单侧Halbach永磁轮均由8个沿径向和切向充磁的磁块、置于内部中心的导磁中心轮毂、侧向固定端盖及周向阵列布置的挡片组成,整个结构具有严格的对称性。8个磁块按Halbach环形阵列的方式布置在导磁中心轮毂内部并以挡片相隔,从而有效避免了磁块在周向转动过程中因与壁面摩擦而产生磨损、破裂或脱落。中心轴采用隔磁材料,并设有一定厚度的轮盘,用于固定连接内、外单侧Halbach永磁轮,以降低内、外侧永磁轮之间磁场的相互影响。内、外单侧Halbach永磁轮的外部端面处设有E形卡扣并与中心轴固定连接,实现了单侧永磁轮在中心轴上的轴向限位。周向转动体机械固定在外侧永磁轮的端面上,其上设置的长螺栓可实现内、外单侧Halbach永磁轮与中心轴的装配与拆卸。在装配过程中,内、外单侧Halbach永磁轮之间的相对转角可通过周向转动体进行调节。
图1
图1
双侧Halbach 永磁轮结构示意
Fig.1
Structural diagram of bilateral Halbach permanent magnet wheel
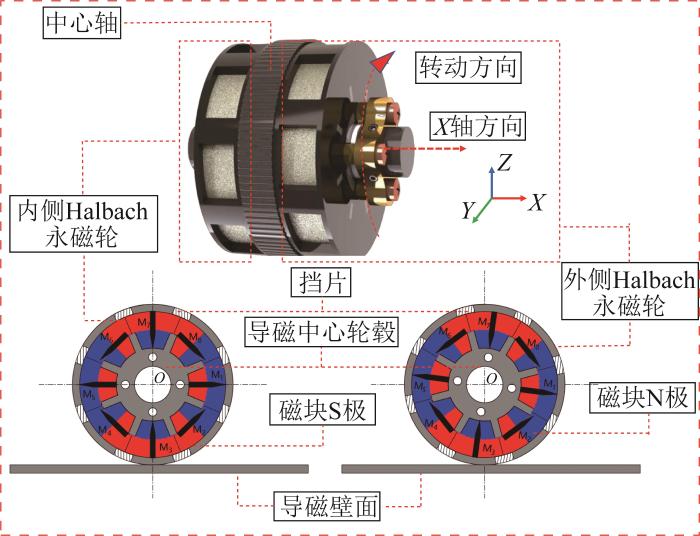
图2 所示为双侧Halbach永磁轮中磁块的磁化方式。其中:外侧Halbach永磁轮与内侧Halbach永磁轮之间存在一定的相对转角,通过控制周向转动体绕X 轴旋转可实现内、外侧永磁轮间相对转角的改变。单侧Halbach永磁轮中相邻2个磁块的充磁方向相差45°,图中黑色箭头指向即为磁块的充磁方向,严格按照经典的Halbach阵列形式布局。永磁轮表现出对外吸附力增强、对内吸附力减弱的特性。
图2
图2
双侧Halbach 永磁轮内部磁块的磁化方式
Fig.2
Magnetization method of magnetic blocks in the bilateral Halbach permanent magnet wheel
Halbach阵列通过将磁化方向不同的磁块以特定的方式排列布置,使得磁场在一侧(工作面)显著增强,而在另一侧(非工作面)大幅减弱甚至趋近于零[15 -16 ] 。这种排列方式可有效集中磁场,提高磁感应密度,进而提高Halbach永磁轮的吸附力。然而,由于磁块按特定规律排列,Halbach永磁轮在工作面上形成接近正弦分布的磁场,这种周期性的磁场变化导致永磁轮在周向转动过程中的吸附力呈周期性波动,进而影响吸附稳定性,增加了爬壁机器人倾覆的风险[18 -19 ] 。因此,为提高吸附稳定性,必须减小永磁轮周向转动过程中吸附力的周期性波动,以满足爬壁机器人对吸附性能的要求。
2 双侧Halbach 永磁轮吸附力理论研究
2.1 单侧Halbach 永磁轮的吸附力
对于单侧Halbach永磁轮,8个磁块的磁化方向在永磁轮周向上按照特定的角度排列,每个磁块的磁化角度与其在Halbach阵列中的位置有关。各磁块的磁化角度θi 可表示为:
θ i = θ 0 + 2 π ( i - 1 ) N , i = 1 , 2 , … , 8 (1)
式中:θ 0 为初始相位,θ 0 = 0 ° N 为磁块总数,N =8。
则在极坐标系下,每个磁块的磁化矢量 M i
M r i = M 0 c o s k θ i M θ i = M 0 s i n k θ i (2)
M 0 = B r μ 0
式中:Mri 、Mθi 分别为第i 个磁块的磁化矢量在径向、切向上的分量;M 0 为磁块磁化强度的幅值;B r μ 0 μ 0 = 4 π × 10 - 7 H / m k 为模态系数,k = 2
根据磁偶极子理论,在极坐标系中,各磁块的磁感应强度可表示为:
B i = μ 0 4 π 3 ( m i ⋅ r ^ ) r ^ - m i r i 3 (3)
r ^ = r - r i r i
m i = V i ( M r i r ^ + M θ i θ ^ )
式中: B i i 个磁块在观测点处的磁感应强度; m i i 个磁块的磁偶极矩, m i Vi M i r ^ θ ^ r r i i 个磁块的位置矢量;ri 为第i 个磁块到观测点的距离;Vi 为第i 个磁块的体积。
在极坐标系中,各磁块磁感应强度的径向分量B r i B θ i
B r i = μ 0 4 π r i 3 2 M r i c o s ( θ i - θ o b s ) - M θ i s i n ( θ i - θ o b s ) B θ i = μ 0 4 π r i 3 M θ i c o s ( θ i - θ o b s ) + 2 M r i s i n ( θ i - θ o b s ) (4)
当永磁轮以某一角速度w θ i '
θ i ' = θ i + w t = 2 π ( i - 1 ) N + w t (5)
此时,第i 个磁块的磁感应强度在径向、切向上的分量可表示为:
B r i = μ 0 4 π r i 3 2 M r i c o s ( θ i ' - θ o b s ) - M θ i s i n ( θ i ' - θ o b s ) B θ i = μ 0 4 π r i 3 M θ i c o s ( θ i ' - θ o b s ) + 2 M r i s i n ( θ i ' - θ o b s ) (6)
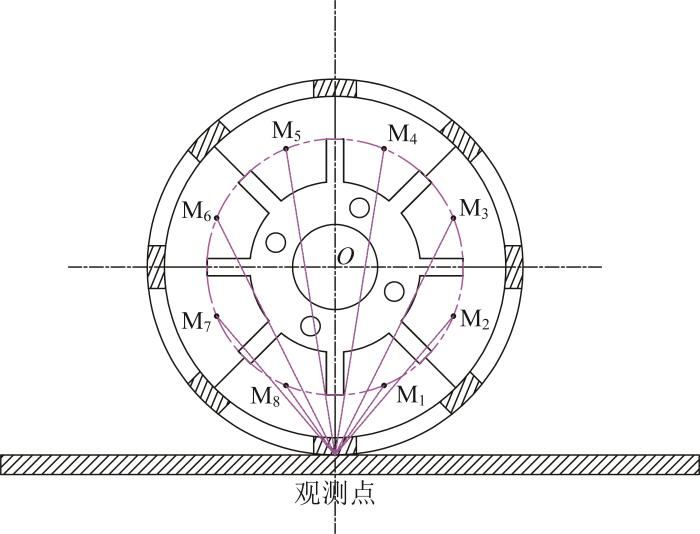
为获取各磁块到观测点的距离,并在保证计算精度的前提下降低磁场模型的复杂度,对磁场模型进行适当的简化处理,作如下假设:1)磁块内部的磁化强度均匀分布;2)磁场观测点位于磁块几何中心的对称轴上;3)忽略磁块尺寸对磁场分布的高阶影响,将磁块等效为位于其几何中心的点磁源,磁场强度主要取决于磁块几何中心与观测点之间的距离。如图3 所示,基于余弦定理求解各磁块到观测点的距离。图中:M1 、M2 、…、M8 表示8个磁块;各磁块几何中心所围成圆的半径r 0 =30 mm。
图3
图3
磁块到观测点的距离示意图
Fig.3
Diagram of distance from magnetic block to observation point
r i = r 0 2 + R 2 - 2 r 0 R c o s ( θ i ' - θ o b s ) (7)
单侧Halbach永磁轮在观测点处产生的磁场为各磁块磁场的矢量叠加,则永磁轮的磁感应强度 B
B = ∑ i = 1 8 B i (8)
在极坐标系中,单侧Halbach永磁轮的磁感应强度 B Br 和Bθ 分别为:
B r = ∑ i = 1 8 B r i B θ = ∑ i = 1 8 B θ i (9)
基于麦克斯韦应力张量公式,单侧Halbach永磁轮的吸附力F 的计算公式如下:
F = 1 2 μ 0 ∫ S e f f B r 2 - B θ 2 d S (10)
式中:S eff 为单侧Halbach永磁轮与导磁壁面之间的有效吸附面积。
为获得每个磁块与导磁壁面之间的有效吸附面积,本文基于磁块结构与磁场分布的特性,建立了吸附面积Si 与距离ri 的关系,由此确定了各磁块有效吸附面积的修正模型:
S i = S 0 r m i n r i 2 (11)
式中:S 0 为单侧Halbach永磁轮的最大接触面积,为固定值,S 0 = 3 × 10 - 4 m 2 r m i n r i
由此可得,单侧Halbach永磁轮与导磁壁面的有效吸附面积S eff 为:
S e f f = ∑ i = 1 8 S i (12)
联立式(9)至(12),单侧Halbach永磁轮的吸附力F 可表示为:
F = 1 2 μ 0 B r 2 - B θ 2 ⋅ S e f f = 1 2 μ 0 B r 2 - B θ 2 ⋅ ∑ i = 1 8 S i (13)
2.2 双侧Halbach 永磁轮的吸附力
双侧Halbach永磁轮的吸附力包括2个单侧Halbach永磁轮产生的吸附力,以及两侧永磁轮之间磁场耦合作用所产生的吸附力。由于中心轴采用隔磁材料,内、外侧永磁轮之间的磁场耦合作用对整体吸附力的影响较小,可忽略不计。为简化处理,将双侧Halbach永磁轮的吸附力分为内、外单侧Halbach永磁轮吸附力两部分单独进行计算。
根据2.1节中的吸附力计算公式,内侧Halbach永磁轮的吸附力F in 可表示为:
F i n = 1 2 μ 0 B r , i n 2 - B θ , i n 2 ⋅ S e f f , i n (14)
式中:Br , in 、Bθ , in 分别为内侧永磁轮的径向、切向磁感应强度,S in, eff 为内侧永磁轮的有效吸附面积。
内、外侧永磁轮仅相对转角存在差别,引入θ r e l F out 可表示为:
F o u t = 1 2 μ 0 B r , o u t 2 - B θ , o u t 2 ⋅ S e f f , o u t (15)
B r , o u t = ∑ i = 1 8 B r i , o u t B θ , o u t = ∑ i = 1 8 B θ i , o u t
B r i , o u t = μ 0 4 π r i , o u t 3 2 M r i c o s ( θ i ' + θ r e l - θ o b s ) - M θ i s i n ( θ i ' + θ r e l - θ o b s ) B θ i , o u t = μ 0 4 π r i , o u t 3 M θ i c o s ( θ i ' + θ r e l - θ o b s ) + 2 M r i s i n ( θ i ' + θ r e l - θ o b s )
r i , o u t = r 0 2 + R 2 - 2 r 0 R c o s ( θ i ' + θ r e l - θ o b s )
双侧Halbach永磁轮的吸附力F t 为内、外侧永磁轮的吸附力之和,联立式(14)和式(15),可得:
F t = F i n + F o u t (16)
3 双侧Halbach 永磁轮参数优化
由上文理论分析可知,双侧Halbach永磁轮的吸附力变化规律由单侧永磁轮吸附力决定。因此,有必要分析单侧Halbach永磁轮在周向转动过程中的吸附力变化规律。
根据双侧Halbach永磁轮吸附力的理论公式,可以发现:影响其吸附力波动的关键参数为内、外侧永磁轮的相对转角θ r e l θ r e l
为更好地分析双侧Halbach永磁轮在周向转动过程中的吸附力变化特性,引入以下3个吸附力评价指标。
平均吸附力F m e a n
吸附力波动幅度∆ F = F m a x - F m i n F m a x F m i n
吸附力波动系数C F = ∆ F / F m e a n
本文以吸附力波动系数C F C F
3.1 单侧Halbach 永磁轮的吸附力变化特性
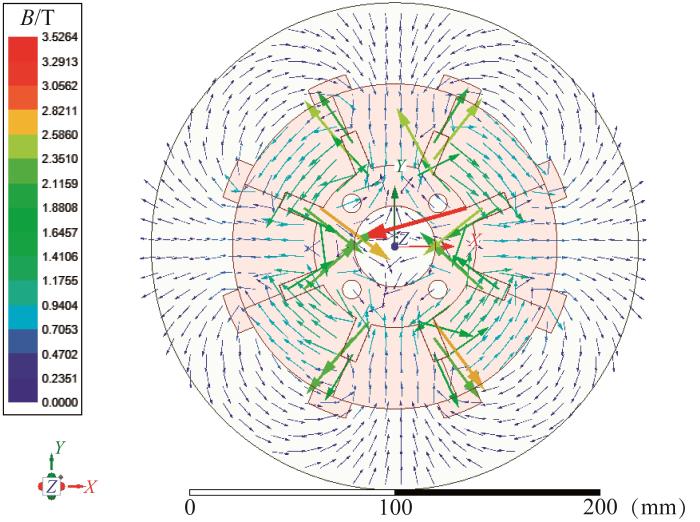
借助ANSYS Electronics Maxwell仿真软件对单侧Halbach永磁轮内部的磁感线分布情况进行分析,结果如图4 所示。由图4 可知,永磁轮内部的磁感应线严格按照Halbach阵列方式呈现出均匀性、对称周期性分布,这导致单侧Halbach永磁轮在周向转动过程中的吸附力必然存在周期性波动。
图4
图4
单侧Halbach 永磁轮内部磁感线分布
Fig.4
Magnetic flux line distribution of unilateral Halbach permanent magnet wheel
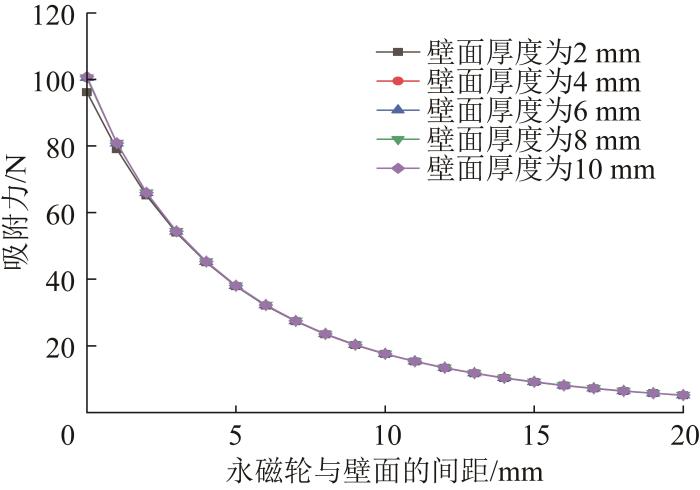
在对单侧Halbach永磁轮周向转动过程中的吸附力变化特性进行有限元仿真验证前,须先讨论单侧Halbach永磁轮的吸附力与导磁壁面厚度之间的关系。图5 所示为单侧Halbach永磁轮的吸附力与壁面厚度、壁面间距的关系。由图5 可知,在相同壁面间距下,随着壁面厚度的增大,永磁轮的吸附力几乎不变。这是因为当壁面达到一定厚度时,永磁轮与壁面接触点处的磁场强度达到饱和状态,吸附力不再增大[20 ] 。此外,在不同壁面厚度下,永磁轮的吸附力均随壁面间距的增大而减小。基于现有实验条件,选定壁面厚度为10 mm,在后续的验证实验中使用厚度为10 mm的导磁钢板。
图5
图5
单侧Halbach 永磁轮的吸附力与壁面厚度、壁面间距的关系
Fig.5
Relationship between adhesion force of unilateral Halbach permanent magnet wheel and wall thickness and wall spacing
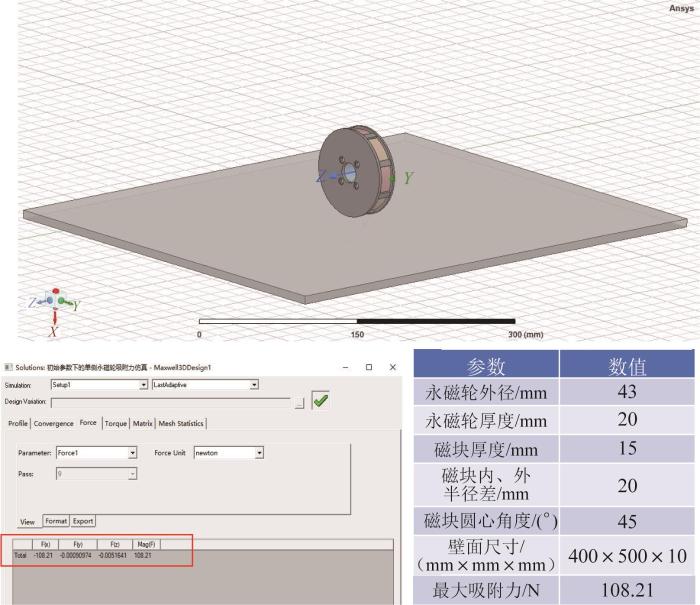
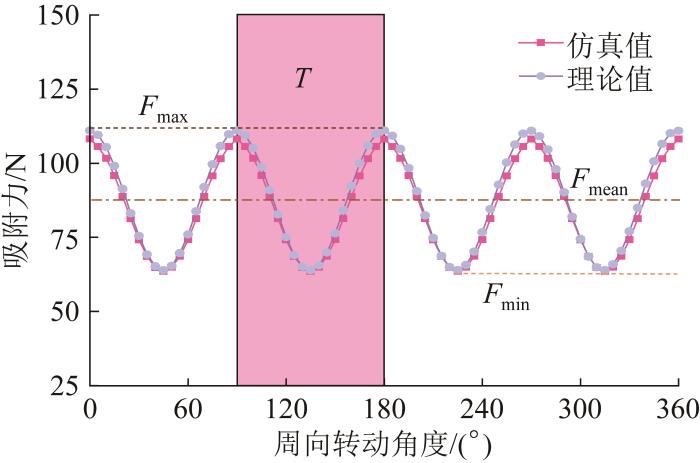
为验证上文所建立的单侧Halbach永磁轮吸附力理论模型的准确性,利用ANSYS Electronics Maxwell软件对单侧Halbach永磁轮在周向转动过程中的吸附力进行有限元仿真,并与理论计算结果进行对比。图6 所示为基于ANSYS Electronics Maxwell软件构建的单侧Halbach永磁轮有限元仿真模型。由图6 可知,单侧Halbach永磁轮的最大吸附力为108.21 N。控制永磁轮的周向转动角度,按5°的步长进行离散化并记录不同周向转动角度下永磁轮对导磁壁面的吸附力数据。结合吸附力仿真结果与理论计算结果绘制对比曲线,如图7 所示。对比结果表明,单侧Halbach永磁轮吸附力的理论计算结果与有限元仿真结果在整体变化趋势上保持高度一致,吸附力的波动周期、相位特征和变化规律均具有良好的一致性,表明所建立的单侧Halbach永磁轮吸附力理论模型具有较高的准确性。然而,在吸附力变化曲线的波峰、波谷位置,理论计算结果与有限元仿真结果存在细微差异。经分析,两者误差主要源于有限元仿真过程中对实际物理环境的简化处理,具体体现在以下2个方面:
图6
图6
单侧Halbach 永磁轮有限元仿真模型
Fig.6
Finite element simulation model of unilateral Halbach permanent magnet wheel
图7
图7
单侧Halbach 永磁轮周向转动过程中的吸附力变化曲线
Fig.7
Variation curves of adhesion force during circumferential rotation of unilateral Halbach permanent magnet wheel
1)仿真计算区域采用有限边界条件,磁场在空间中的扩散范围受到限制,难以真实反映实际物理环境中磁场的自然扩散特性;
2)磁块与导磁壁面之间的气隙区域以及磁极边缘处的有限元网格划分精度有限,导致局部磁场的计算精度较低,引入了一定的计算误差。
由上文分析可知,在单侧Halbach永磁轮周向转动过程中,其与导磁壁面之间的吸附力呈现出类似正弦曲线的周期性变化,且波动周期T =90°。根据图7 ,由理论模型计算得到的单侧Halbach永磁轮周向转动过程中的平均吸附力仅为85.500 N,而吸附力波动幅度接近45 N,吸附力波动系数高达0.522。吸附力波动大将严重影响爬壁机器人的运动稳定性,而较小的平均吸附力无法为爬壁机器人提供较高的负载能力。因此,必须对Halbach永磁轮的吸附稳定性进行优化,最终实现永磁轮周向转动过程中的吸附力波动系数最小,同时尽可能地提高其平均吸附力。
3.2 双侧Halbach 永磁轮的内、外侧相对转角优化
根据上文对吸附力理论模型的分析,考虑到双侧Halbach永磁轮严格的对称结构设计,只需对内、外侧相对转角为0°~180°时的吸附力变化情况进行深入研究,即能全面分析双侧Halbach永磁轮周向转动过程中的吸附力变化规律,同时保证计算的高效性和精确性。
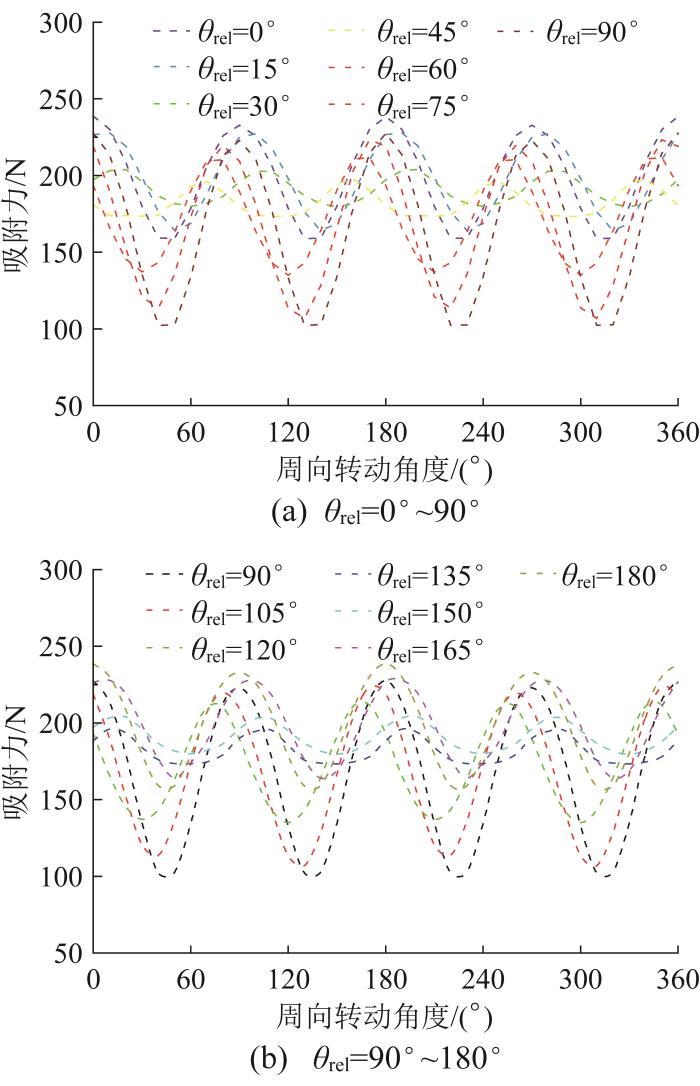
为准确分析内、外侧相对转角θ rel 分别为0°~90°和90°~180°时双侧Halbach永磁轮周向转动过程中的吸附力变化情况,将相对转角按步长为15°进行离散化处理,通过MATLAB软件计算不同相对转角下的吸附力,并绘制图8 所示的吸附力变化曲线。
图8
图8
双侧Halbach 永磁轮周向转动过程中的吸附力变化曲线
Fig.8
Variation curves of adhesion force during circumferential rotation of bilateral Halbach permanent magnet wheel
通过对比图8 (a)与图8 (b)中的曲线发现,当内、外侧相对转角为0°~90°和90°~180°时,双侧Halbach永磁轮的吸附力变化表现出镜像对称性。基于此,为简化数据处理过程并减少重复计算,仅对相对转角为0°~90°这一范围内的吸附力评价指标进行详细分析。
表1 所示为内、外侧相对转角θ r e l = 0 °~90°时双侧Halbach永磁轮周向转动过程中的吸附力评价指标。从表1 中可直观看出,随着相对转角的增大,双侧Halbach永磁轮周向转动过程中的吸附力波动系数表现出先下降后上升的趋势,且平均吸附力逐渐减小。进一步分析表1 中的数据,可确定当相对转角为30°~45°时,该永磁轮的吸附力波动系数最小,呈现出最佳的吸附稳定性。由此可得:在30°~45°这一区间内,存在使双侧Halbach永磁轮吸附稳定性最优的相对转角。
为确定最优的相对转角θ r e l θ r e l 表2 所示。
通过对比表2 中的数据发现,当内、外侧相对转角为35°时,尽管双侧Halbach永磁轮的平均吸附力仅为187.955 N,但其在周向转动过程中的吸附力波动系数仅为0.057,且吸附力波动幅度仅为10.713 N,说明此时双侧Halbach永磁轮的吸附稳定性最优。基于此,最终确定双侧Halbach永磁轮内、外侧的最优相对转角为35°。
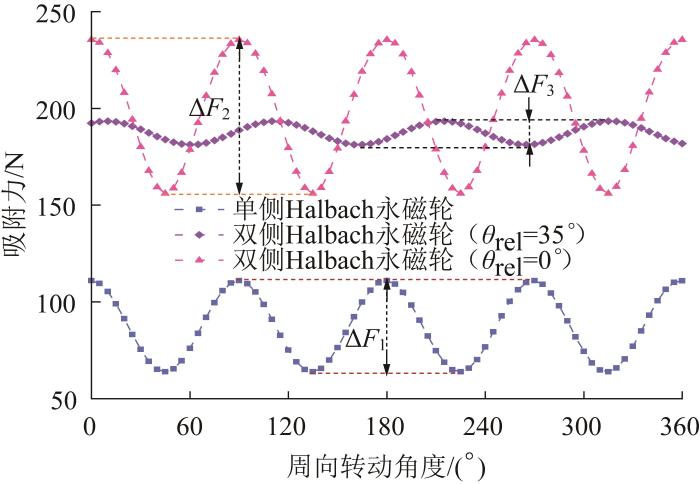
通过MATLAB软件计算单侧Halbach永磁轮和双侧Halbach永磁轮(相对转角θ r e l 图9 所示。由图9 可知,双侧Halbach永磁轮的平均吸附力大于单侧Halbach永磁轮。与相对转角θ r e l θ r e l ∆ F 3 < ∆ F 2 θ r e l
图9
图9
Halbach 永磁轮周向转动过程中的吸附力变化曲线
Fig.9
Variation curves of adhesion force during circumferential rotation of Halbach permanent magnet wheels
4 实验验证
4.1 永磁轮样机与实验平台
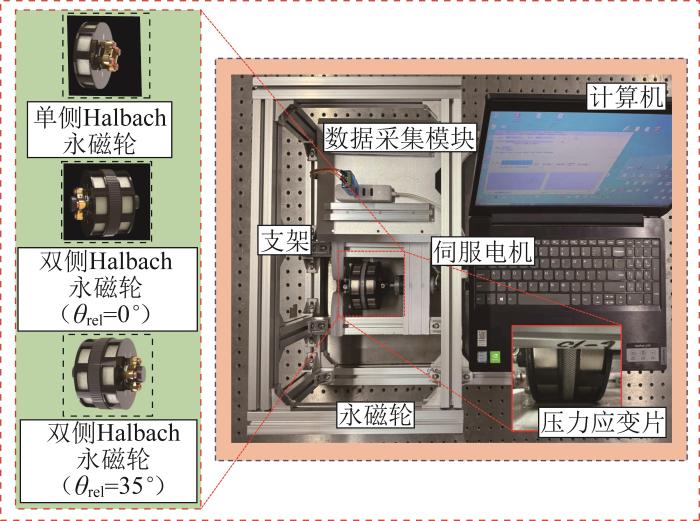
为验证双侧Halbach永磁轮的吸附性能,使用标准型材搭建实验平台,如图10 所示。实验设备主要包括压力应变片、压力数据采集模块、双侧Halbach永磁轮实物样机、伺服电机和计算机等。在Q235导磁钢板上布置FSR402电阻式薄膜压力传感器;将双侧Halbach永磁轮实物样机固定在实验平台支架上,并与FSR402电阻式薄膜压力传感器和厚度为10 mm的Q235导磁钢板相切。通过固定支架来调控永磁轮与壁面之间的距离,通过伺服电机配合精密控制系统来调节永磁轮的周向转动角度。
图10
图10
Halbach 永磁轮吸附性能测试实验平台
Fig.10
Experimental platform for testing adhesion performance of Halbach permanent magnet wheels
4.2 永磁轮吸附力测试实验
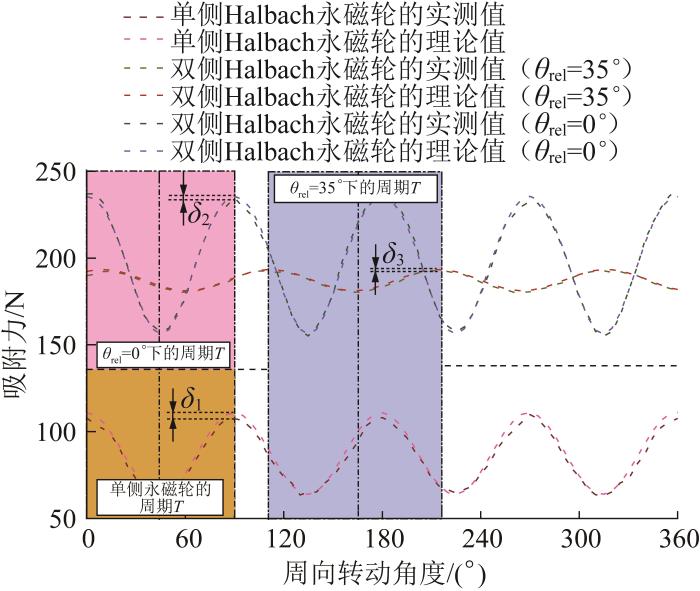
在搭建的实验平台上完成双侧Halbach永磁轮(相对转角θ r e l 图11 所示。由图11 可知,实验测得的永磁轮周向转动过程中的吸附力变化规律与理论计算结果基本吻合。
图11
图11
Halbach 永磁轮周向转动过程中的吸附力对比
Fig.11
Comparison of adhesion force during circumferential rotation of Halbach permanent magnet wheels
通过进一步分析图11 可知,当相对转角θ r e l θ r e l δ 1 =4.5 N>δ 2 =3.0 N>δ 3 =2.1 N。产生误差是因为Halbach永磁轮中布置的8个沿径向、切向充磁的磁块之间存在边界效应,该效应在波动周期发生交替时尤为明显;同时,机械装配误差、实验环境温度等客观因素对永磁轮吸附力的实际测试也有一定影响。
5 结 语
本文针对传统单侧Halbach永磁轮吸附力不可调、平均吸附力较小及周向转动过程中吸附力波动大的问题,提出了一种双侧Halbach永磁轮结构,并通过理论建模、仿真优化与实验验证相结合的方式进行了深入分析,得出以下结论。
1)基于磁偶极子理论与麦克斯韦应力张量法,构建了双侧Halbach永磁轮吸附力理论模型,并通过有限元仿真与实验验证了其准确性。通过优化内、外侧永磁轮的相对转角(最优相对转角为35 °
2)吸附力的实测数据与理论计算数据吻合,验证了双侧Halbach永磁轮协同调控的有效性,同时揭示了磁块边界效应与装配误差对吸附力的影响,为后续高精度吸附系统的设计与改进提供了依据。
3)所设计的双侧Halbach永磁轮显著提高了爬壁机器人在导磁壁面(如储罐、船舶、桥梁等的表面)上的负载能力与运动稳定性,可广泛应用于高空检测、设备维护等场景。双侧Halbach永磁轮的可调吸附特性为高性能永磁吸附系统的设计提供了理论支撑和实践指导,这对提升工业自动化设备的可靠性与安全性具有重要意义。
本文链接: https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.142
参考文献
View Option
[1]
YANG P SUN L Y ZHANG M L Design and analysis of a passive adaptive wall-climbing robot on variable curvature ship facades
[J]. Applied Ocean Research , 2024 , 143 : 103879 .
[本文引用: 1]
[2]
SYRYKH N V CHASHCHUKHIN V G Wall-climbing robots with permanent-magnet contact devices: design and control concept of the contact devices
[J]. Journal of Computer and Systems Sciences International , 2019 , 58 (5 ): 818 -827 .
[3]
SONG Y F YANG Z Y CHANG Y et al Design and analysis of a wall-climbing robot with passive compliant mechanisms to adapt variable curvatures walls
[J]. Robotica , 2024 , 42 (4 ): 962 -976 .
[本文引用: 1]
[4]
FAN J Z XU T FANG Q Q et al A novel style design of a permanent-magnetic adsorption mechanism for a wall-climbing robot
[J]. Journal of Mechanisms and Robotics , 2020 , 12 (3 ): 035001 .
[本文引用: 1]
[5]
LI A TAO B DING H Research progress and application of magnetic adhesion wall-climbing robots
[J]. Robot , 2025 , 47 (1 ): 123 -144 .
DOI:10.13973/j.cnki.robot.240045
[7]
LIN S SONG Y F WANG H G et al Variable curvature adaptation and transformation flow of a passive-compliant magnetic wheeled wall-climbing robot
[J]. Mechanism and Machine Theory , 2023 , 189 : 105440 .
[本文引用: 1]
[8]
WANG B Y LI P X LI P B et al Development of a wheeled wall-climbing robot with an internal corner wall adaptive magnetic adhesion mechanism
[J]. Journal of Field Robotics , 2025 , 42 (1 ): 97 -114 .
[10]
ZHANG D LI Z H JIA P et al Optimization design and trajectory error compensation of a facade-adaptive wall-climbing robot
[J]. Symmetry , 2023 , 15 (2 ): 255 .
[本文引用: 1]
[12]
胡晓林 , 郭润兰 , 黄华 , 等 变曲率立面自适应爬壁机器人结构的设计与分析
[J]. 机器人 , 2024 , 46 (5 ): 576 -590 .
[本文引用: 1]
HU X L GUO R L HUANG H et al Design and analysis on an adaptive wall-climbing robot structure for variable curvature facade
[J]. Robot , 2024 , 46 (5 ): 576 -590 .
[本文引用: 1]
[14]
GAO S HOU R L LI J et al Magnetic field analysis and structure design of a new magnetic wheel for wall-climbing robot
[J]. Journal of Superconductivity and Novel Magnetism , 2022 , 35 (2 ): 529 -537 .
[本文引用: 1]
[15]
CHEN J K HE K FANG H T et al Design and simulation analysis of a magnetic adsorption mechanism for a wall-climbing robot
[C]//Intelligent Robotics and Applications . Cham : Springer , 2021 : 147 -157 .
[本文引用: 2]
[16]
ETO H , ASADA H H Development of a wheeled wall-climbing robot with a shape-adaptive magnetic adhesion mechanism
[C]//2020 IEEE International Conference on Robotics and Automation. Paris , May 31-Aug . 31 , 2020 .
[本文引用: 2]
[17]
JIANG Z ZHAO Z CHEN B et al Design and analysis of a passive adaptive wall-climbing robot based on five-bar mechanisms
[J]. Ocean Engineering , 2024 , 298 : 117140 .
[本文引用: 1]
[18]
JIAO S L ZHANG X J ZHANG X et al Magnetic circuit analysis of Halbach array and improvement of permanent magnetic adsorption device for wall-climbing robot
[J]. Symmetry , 2022 , 14 (2 ): 429 .
[本文引用: 1]
[19]
YAN C F SUN Z G ZHANG W Z et al Design of novel multidirectional magnetized permanent magnetic adsorption device for wall-climbing robots
[J]. International Journal of Precision Engineering and Manufacturing , 2016 , 17 (7 ): 871 -878 .
[本文引用: 1]
[20]
杨培 , 张明路 , 孙凌宇 爬壁机器人磁吸附模块设计分析与结构参数优化
[J]. 工程设计学报 , 2024 , 31 (5 ): 592 -602 .
[本文引用: 1]
YANG P ZHANG M L SUN L Y Design analysis and structural parameter optimization for magnetic adsorption module of wall-climbing robot
[J]. Chinese Journal of Engineering Design , 2024 , 31 (5 ): 592 -602 .
[本文引用: 1]
Design and analysis of a passive adaptive wall-climbing robot on variable curvature ship facades
1
2024
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
Wall-climbing robots with permanent-magnet contact devices: design and control concept of the contact devices
0
2019
Design and analysis of a wall-climbing robot with passive compliant mechanisms to adapt variable curvatures walls
1
2024
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
A novel style design of a permanent-magnetic adsorption mechanism for a wall-climbing robot
1
2020
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
磁吸附爬壁机器人研究进展及其应用探索
0
2025
磁吸附爬壁机器人研究进展及其应用探索
0
2025
基于永磁吸附的船体维护爬壁机器人设计
1
2024
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
基于永磁吸附的船体维护爬壁机器人设计
1
2024
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
Variable curvature adaptation and transformation flow of a passive-compliant magnetic wheeled wall-climbing robot
1
2023
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
Development of a wheeled wall-climbing robot with an internal corner wall adaptive magnetic adhesion mechanism
0
2025
轮腿式爬壁机器人的永磁吸附装置设计与优化
1
2022
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
轮腿式爬壁机器人的永磁吸附装置设计与优化
1
2022
... 爬壁机器人是一种能够在垂直立面和天花板上移动的自动化设备,被广泛应用于工业检测、设备维修、高空清洁和安全监控等领域[1 -3 ] .吸附方式作为爬壁机器人结构设计的关键要素,决定了其吸附稳定性与环境适应性.与其他吸附方式相比,永磁吸附具有安全可靠、载重比高的优点[4 -6 ] .其中,轮式永磁吸附爬壁机器人在运动速度、灵活性和能耗等方面具有显著优势,能够快速响应不同壁面条件的变化.然而,轮式爬壁机器人在吸附力调控、负载能力和壁面适应性等方面存在一定的局限性[7 -9 ] .尽管如此,轮式永磁吸附爬壁机器人仍凭借其较低的能耗和较高的速度,在诸多作业场景中展现出较强的竞争力. ...
Optimization design and trajectory error compensation of a facade-adaptive wall-climbing robot
1
2023
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
爬壁机器人悬摆式磁吸附机构的设计与优化
1
2023
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
爬壁机器人悬摆式磁吸附机构的设计与优化
1
2023
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
变曲率立面自适应爬壁机器人结构的设计与分析
1
2024
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
变曲率立面自适应爬壁机器人结构的设计与分析
1
2024
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
一种基于磁力吸附的储罐爬壁机器人本体设计
1
2022
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
一种基于磁力吸附的储罐爬壁机器人本体设计
1
2022
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
Magnetic field analysis and structure design of a new magnetic wheel for wall-climbing robot
1
2022
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
Design and simulation analysis of a magnetic adsorption mechanism for a wall-climbing robot
2
2021
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
... Halbach阵列通过将磁化方向不同的磁块以特定的方式排列布置,使得磁场在一侧(工作面)显著增强,而在另一侧(非工作面)大幅减弱甚至趋近于零[15 -16 ] .这种排列方式可有效集中磁场,提高磁感应密度,进而提高Halbach永磁轮的吸附力.然而,由于磁块按特定规律排列,Halbach永磁轮在工作面上形成接近正弦分布的磁场,这种周期性的磁场变化导致永磁轮在周向转动过程中的吸附力呈周期性波动,进而影响吸附稳定性,增加了爬壁机器人倾覆的风险[18 -19 ] .因此,为提高吸附稳定性,必须减小永磁轮周向转动过程中吸附力的周期性波动,以满足爬壁机器人对吸附性能的要求. ...
Development of a wheeled wall-climbing robot with a shape-adaptive magnetic adhesion mechanism
2
31
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
... Halbach阵列通过将磁化方向不同的磁块以特定的方式排列布置,使得磁场在一侧(工作面)显著增强,而在另一侧(非工作面)大幅减弱甚至趋近于零[15 -16 ] .这种排列方式可有效集中磁场,提高磁感应密度,进而提高Halbach永磁轮的吸附力.然而,由于磁块按特定规律排列,Halbach永磁轮在工作面上形成接近正弦分布的磁场,这种周期性的磁场变化导致永磁轮在周向转动过程中的吸附力呈周期性波动,进而影响吸附稳定性,增加了爬壁机器人倾覆的风险[18 -19 ] .因此,为提高吸附稳定性,必须减小永磁轮周向转动过程中吸附力的周期性波动,以满足爬壁机器人对吸附性能的要求. ...
Design and analysis of a passive adaptive wall-climbing robot based on five-bar mechanisms
1
2024
... 为了克服上述局限性,国内外学者针对永磁吸附爬壁机器人开展了多方面的优化设计,尤其是在磁吸附机构改进方面.Zhang等[10 -11 ] 设计了一种悬摆式磁吸附机构,并以减小磁吸附机构质量和提高其吸附可靠性为目标,对其结构参数进行了优化.该悬摆式磁吸附机构的磁感线几乎全部与导磁立面形成闭合回路,且磁感线疏密程度的变化比较均匀,优化后磁吸附机构的质量虽略有增大,但其吸附力增大了25.52%,吸附效率明显提高.胡晓林等[12 ] 设计了一种变曲率立面自适应爬壁机器人,其永磁轮采用Halbach阵列方式布置,从而在减小自身体积和增大磁力的同时,尽可能地抑制了漏磁现象.邱仕诚等[13 ] 设计的储罐爬壁机器人的永磁吸附轮以2个N35H永磁体环作为磁极,以内外衔铁、导磁环导通磁回路,进而实现与壁面的稳定吸附.所设计的衔铁高度略大于导磁环高度,可避免导磁环因受力挤压而破碎;另外,在磁轮表面包覆橡胶垫,以减少衔铁与永磁体表面的振动冲击,增大摩擦力,延长使用寿命.Gao等[14 ] 在爬壁机器人永磁轮的结构设计中,通过增设导磁轭铁和采用“3+2”磁场排列结构的方式,使相同尺寸下永磁轮的吸附力提高了约1.72倍,重量减小了37%.同时,在永磁体布置上采用Halbach阵列形式,利用8个磁化方向不同的扇形磁块组成圆形永磁轮,在有限空间和重量的约束下实现了麦克斯韦场的最大化,显著提高了整体吸附能力.Chen等[15 ] 在Halbach阵列磁吸附机构的基础上,调整了各永磁体的形状、尺寸、磁化方向和排列方式,使磁吸附机构前端永磁体的尺寸大于末端,有效地提高了磁能利用率,并减小了磁吸附机构的整体质量.Eto等[16 ] 面向大型钢结构提出了一种基于形状自适应磁吸附机构的轮式爬壁机器人,其磁吸附机构采用Halbach阵列方式,且每个永磁轮均具有2个旋转自由度,使得磁力方向始终垂直于接触表面,从而实现机器人在曲率多变的金属壁面上高效自由移动.Jiang等[17 ] 对爬壁机器人的永磁轮进行了结构设计与参数化仿真,探究了机器人运动过程中壁面厚度及永磁轮转动角度对吸附力的影响,发现永磁轮在周向转动过程中的吸附力呈周期性变化,但并没有提出改善吸附力波动变化的解决方案. ...
Magnetic circuit analysis of Halbach array and improvement of permanent magnetic adsorption device for wall-climbing robot
1
2022
... Halbach阵列通过将磁化方向不同的磁块以特定的方式排列布置,使得磁场在一侧(工作面)显著增强,而在另一侧(非工作面)大幅减弱甚至趋近于零[15 -16 ] .这种排列方式可有效集中磁场,提高磁感应密度,进而提高Halbach永磁轮的吸附力.然而,由于磁块按特定规律排列,Halbach永磁轮在工作面上形成接近正弦分布的磁场,这种周期性的磁场变化导致永磁轮在周向转动过程中的吸附力呈周期性波动,进而影响吸附稳定性,增加了爬壁机器人倾覆的风险[18 -19 ] .因此,为提高吸附稳定性,必须减小永磁轮周向转动过程中吸附力的周期性波动,以满足爬壁机器人对吸附性能的要求. ...
Design of novel multidirectional magnetized permanent magnetic adsorption device for wall-climbing robots
1
2016
... Halbach阵列通过将磁化方向不同的磁块以特定的方式排列布置,使得磁场在一侧(工作面)显著增强,而在另一侧(非工作面)大幅减弱甚至趋近于零[15 -16 ] .这种排列方式可有效集中磁场,提高磁感应密度,进而提高Halbach永磁轮的吸附力.然而,由于磁块按特定规律排列,Halbach永磁轮在工作面上形成接近正弦分布的磁场,这种周期性的磁场变化导致永磁轮在周向转动过程中的吸附力呈周期性波动,进而影响吸附稳定性,增加了爬壁机器人倾覆的风险[18 -19 ] .因此,为提高吸附稳定性,必须减小永磁轮周向转动过程中吸附力的周期性波动,以满足爬壁机器人对吸附性能的要求. ...
爬壁机器人磁吸附模块设计分析与结构参数优化
1
2024
... 在对单侧Halbach永磁轮周向转动过程中的吸附力变化特性进行有限元仿真验证前,须先讨论单侧Halbach永磁轮的吸附力与导磁壁面厚度之间的关系.图5 所示为单侧Halbach永磁轮的吸附力与壁面厚度、壁面间距的关系.由图5 可知,在相同壁面间距下,随着壁面厚度的增大,永磁轮的吸附力几乎不变.这是因为当壁面达到一定厚度时,永磁轮与壁面接触点处的磁场强度达到饱和状态,吸附力不再增大[20 ] .此外,在不同壁面厚度下,永磁轮的吸附力均随壁面间距的增大而减小.基于现有实验条件,选定壁面厚度为10 mm,在后续的验证实验中使用厚度为10 mm的导磁钢板. ...
爬壁机器人磁吸附模块设计分析与结构参数优化
1
2024
... 在对单侧Halbach永磁轮周向转动过程中的吸附力变化特性进行有限元仿真验证前,须先讨论单侧Halbach永磁轮的吸附力与导磁壁面厚度之间的关系.图5 所示为单侧Halbach永磁轮的吸附力与壁面厚度、壁面间距的关系.由图5 可知,在相同壁面间距下,随着壁面厚度的增大,永磁轮的吸附力几乎不变.这是因为当壁面达到一定厚度时,永磁轮与壁面接触点处的磁场强度达到饱和状态,吸附力不再增大[20 ] .此外,在不同壁面厚度下,永磁轮的吸附力均随壁面间距的增大而减小.基于现有实验条件,选定壁面厚度为10 mm,在后续的验证实验中使用厚度为10 mm的导磁钢板. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}