


随着工业化进程的加快,起重机在工业生产、物流运输及建筑施工等多个关键领域扮演着不可或缺的角色,确保其安全运行至关重要[1]。然而,因结构复杂、载荷多变及工况恶劣,起重机事故时有发生,造成了严重的人员伤亡、财产损失和生产中断。深入分析事故根源,对起重机服役过程中存在的各类危险源进行精准识别、科学量化并评估其风险等级,是从设计源头提升设备本质安全和实现事故主动预防的关键环节。
尽管起重机安全风险评估的重要性已被广泛认知,但该领域的研究与实践仍面临诸多挑战。其一,危险源辨识的全面性和系统性不足,尤其是针对复杂结构件及其相互作用的潜在失效模式,现有方法难以覆盖所有危险源。其二,缺乏统一、有效的危险源量化评估体系,导致危险源之间难以精确衡量和相互比较。其三,现有的风险评估模型在实际应用中存在局限性,如对模糊信息处理不足、动态演化过程模拟困难、计算效率低下和对专家知识依赖过重等问题,制约了评估的准确性和实用性。虽然目前尚无直接针对这些问题的研究,但多年来国内外学者围绕起重机及其他领域在危险源辨识、评估数据量化及安全评估方法等方面开展了大量研究,这些成果可为解决上述问题提供思路与方案支撑。
在危险源辨识方面,安慧等[2]提出了基于模糊故障树(fuzzy fault tree, FFT)的建筑施工高处坠落全面风险评估方法,从定性和定量角度识别出关键致因要素并得到失效概率。Shiokari等[3]提出了基于结构模型的危险识别方法,借助结构和任务图、清单及关键字,根据系统整体结构、各组件任务、任务所需信息以及任务图中组件间相互作用,完成了自主船舶的危险识别。Sunaryo等[4]使用危险识别和风险评估方法,根据活动序列识别集装箱码头装卸过程中潜在风险的类型、原因和影响,并构建了风险矩阵以获得风险等级。Shen等[5]运用HAZOP(hazard and operability analysis,危险与可操作性分析)与FMEA(failure mode and effect analysis,失效模式与影响分析)相结合的方法,分析氢燃料电池车潜在的事故场景并评估各场景风险,全面梳理了危害并找出了潜在安全问题。刘永强等[6]提出了基于BIM(building information model,建筑信息模型)技术的危险源自动辨识流程,实现了大型水闸工程施工危险源的快速辨识。上述方法为系统辨识危险源提供了有力的技术支撑,但针对桥式起重机等特定起重机械结构特点的精细化、全覆盖失效模式辨识,以及如何将辨识结果有效融入量化评估流程,仍需进一步深入探索。
在评估数据量化方面,Wolniewicz等[7]构建了模糊逻辑模型,从4个维度模糊评价了有轨电车模拟器控制台输出保真度的等级,完成了定性到定量的分级转化。Shen等[8]为考虑专家评价的不确定性,利用云模型的特征熵和超熵,将语言变量的模糊性和随机性转变为数学表达式。Yucesan等[9]用模糊最优最劣法(fuzzy best-worst method, FBWM)与模糊贝叶斯网络(fuzzy Bayesian network, FBN)法,利用梯形模糊数处理专家评价数据以确定故障概率,解决了故障数据的不确定性问题。上述研究成果可为主观评价信息的处理提供有效途径,但如何构建适配起重机危险源特性、便于专家操作且精准反映风险差异的量化评估体系,仍是目前亟待解决的关键问题。
在安全评估方面,He等[10]提出了基于SAT(scenario analysis theory,情景分析理论)与改进BN算法的安全评估模型,通过构建事故情景要素、运用改进BN对影响因素及其相互作用进行建模和设计安全评估函数,实现了对起重机事故安全的定量分析。Chen等[11]搭建了桥式起重机安全评估指标体系,借助聚类分析修正专家权重分配以优化评估的合理性,并构建了基于模糊隶属函数与模糊神经网络的安全评估模型。Li等[12]提出了一种基于Z-SPA(Z-number and set pair analysis,Z数与集对分析)的起重机作业风险评估模型,该模型采用等级判别规则和得分函数来确定起重机作业风险等级。吴峰崎等[13]运用云模型与组合赋权,生成了高可信度且兼顾主客观评估的综合权重,由此确定了桥式起重机金属结构的安全等级。Zhong等[14]提出了塔式起重机作业风险评估框架,通过构建基于BN的风险评估网络,实现了起重机作业风险的有效识别与动态评估。上述研究显著推进了起重机安全、风险评估的量化水平,但在处理复杂系统多层次失效逻辑、融合多种不确定性信息以及提高模型普适性与计算效率方面仍有提升空间。
为解决上述问题,本文提出了基于FFT-BN模型的桥式起重机危险等级评估方法,并开发专用型系统平台。同时,以在役QD40 t-22.5 m-9 m通用桥式起重机为工程实例,验证所提出方法的工程可行性与场景适用性。
1 问题描述
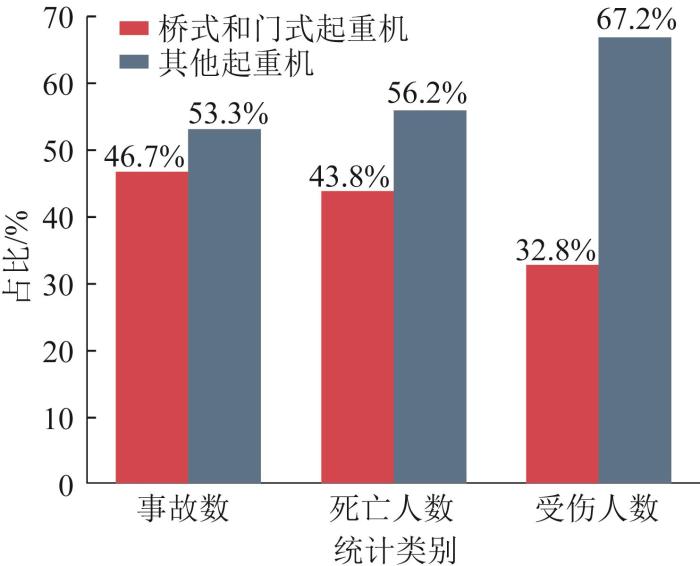
在起重机械领域,由危险源失效导致的起重机事故频繁发生。如图1所示,根据我国2002—2018年发生的734起重机械事故的统计数据,桥式和门式起重机事故发生了343起,死亡380人,受伤122人,约占全部起重机械事故的46.7%,事故死亡人数的43.8%,受伤人数的32.8%。由此可见,我国在桥式和门式起重机危险源设计预防方面存在严重问题。但欧洲很少发生造成人员伤亡的桥式和门式起重机事故。这是因为欧洲除了重视产品质量和设备本质安全外,还制定了只针对安全性并需要强制执行的桥式和门式起重机的欧盟标准(EN 15011: 2020)[15]。该标准以起重机可能会发生的各种伤害与事故作为危险源,并围绕这些危险源一一制定出对应的安全要求和防护措施。与之相比,我国在起重机械重大危险源列举,安全要求、防护措施和检验规则等的制定,以及设计前端有效防控方面仍存在差距、缺失或不足。
图1
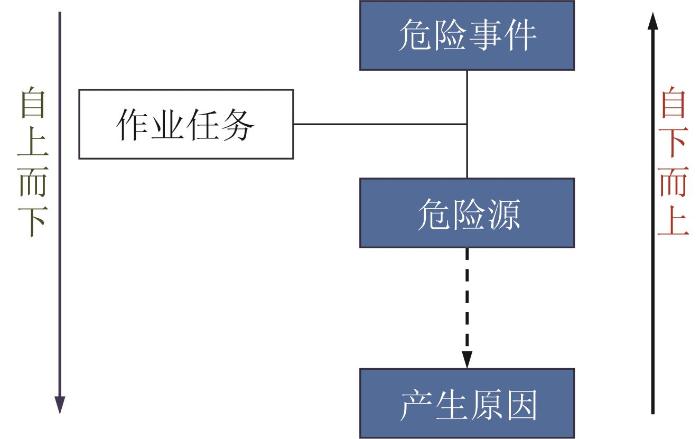
目前,我国最新推出的GB/T 45374—2025《起重机械 危险源辨识》[16]确立了起重机械危险源辨识的基本原则,描述了起重机械危险源辨识的方法,并给出了起重机械可能会发生的危险事件及常见危险源。在危险源辨识方法方面,该标准规定采用自上而下法或自下而上法,如图2所示。其中:自上而下法以可能会发生的危险事件为核查清单的起点,确定其可能在哪些作业任务中产生并追溯危险源;自下而上法以检查所有危险源作为核查清单的起点,分析其在作业任务中可能会导致的危险事件。这2种方法均能够覆盖作业环境中尽可能多的潜在危险因素,不局限于特定的危险事件,有助于发现那些容易被忽视的细微危险源,从而更全面地识别危险,减少危险盲点。但是,要准确判断危险事件可能在哪些作业任务中产生,分析人员必须具备丰富的行业经验和专业知识,并熟悉各类作业流程及其潜在危险。若分析人员经验不足,则可能会导致危险源辨识不准确、不全面等问题。
图2
此外,危险源所致失效概率的精确量化也面临显著挑战。从危险源数据基础上看,行业特性导致统计样本规模受限:起重机类型涵盖桥式、塔式、门式等多种,不同型号设备在港口、建筑、工厂等差异化场景中的失效模式存在显著异质性,而单一设备类型的失效数据难以形成具备统计效力的大规模样本集。同时,数据记录体系存在结构性缺陷:部分企业的设备故障记录缺乏标准化流程,早期故障数据留存机制不健全,且记录重点大多集中于重大事故,而对潜在隐患及轻微失效事件的系统性捕获不足。从失效机理来分析,多元因素的耦合作用加剧了失效概率量化的复杂性:结构疲劳、电气故障和操作失误等危险源与环境载荷(如风力、温度)、维护保养状态等因素存在交叉影响,致使单一危险源的独立失效数据难以从复杂因果链中有效剥离。鉴于历史数据的样本局限性与危险源失效概率的不确定性特征,当前技术条件下难以采用精确数值对危险源进行定量表征。
欧盟发布的EN 13001-2: 2021[17]对起重机危险源进行了等级划分,并根据不同等级制定危险系数,由此将危险源转化为可量化、可比较、可操作的数值指标,从而提升了危险管控的精准性和效率。但是,危险系数在制定过程中主要依据起重机的作业环境、工况、结构特性以及以往经验,未能系统地通过评估体系得出精确的数值。目前,我国已发布的标准尚未对此进行相关制定。
综上所述,在起重机危险评估策略方面,相比于欧盟,我国和国际标准化组织(International Organization for Standardization, ISO)处于滞后阶段。但欧盟策略在针对危险源的量化方法、危险等级评估逻辑以及设计源头预防等方面仍存在问题。因此,若能精准辨识出起重机在服役过程中存在的危险源,并以完整的指标量化方法对危险源进行定量表征,进而在考虑多因素耦合作用下利用评估模型进行危险源等级划分,针对危险等级较高的危险源进行重点设计和有效防范,则可从设计源头显著提升起重机械的安全性,最大限度地防止事故发生。基于此,本文围绕起重机危险源的辨识与量化方法、危险等级评估模型及评估实现方式三个核心维度,开展基于FFT-BN模型的桥式起重机危险等级评估方法及系统的相关研究。由表1所示的起重机危险评估策略可知,本文所提出的评估方法能够精准聚焦国内起重机危险等级评估现存的核心问题,通过优化评估逻辑、完善量化体系及强化源头预防机制等方式,有效提升我国起重机危险源的管控水平,为起重机械的安全稳定运行提供坚实保障。
表1 起重机危险评估策略对比
Table 1
| 评估策略 | 危险源辨识范围 | 量化方法 | 危险等级评估逻辑 | 设计源头预防 | 标准体系兼容性 |
|---|---|---|---|---|---|
| 国内策略(GB) | 不全面 | 定性为主,精度低 | 逻辑简单,系统性差 | 较弱,事后整改为主 | 不统一 |
| 国际策略(ISO) | 不全面 | 定性为主,精度低 | 逻辑简单 | 较弱,事后整改为主 | 不统一 |
| 欧盟策略(EN) | 全面 | 定量为主,精度较高 | 逻辑清晰,灵活性差 | 较强,依赖人工判断 | 体系完整 |
| 本文方法 | 全面 | 定量为主,精度高 | 逻辑严谨,多层级推理 | 强,支持设计端预防 | 兼容性强 |
2 桥式起重机危险源辨识及量化方法
2.1 危险源辨识
针对通用桥式起重机的组成,围绕其结构及零部件开展全面失效分析,以精准挖掘可能导致起重机失效的潜在危险源。在分析过程中,遵循“整机—机构/结构—零部件—危险源”的层次划分规则,自上而下、由整体到局部地深入剖析,逐步明确导致起重机危险事件的潜在根源。
如图3所示,通用桥式起重机由金属结构、运行机构和安全装置三部分组成。金属结构包含小车架和桥架结构,前者由3根型钢梁组成,后者包括2根主梁、4根端梁和2根连接梁。各梁均由上盖板、下盖板、左腹板、右腹板、大隔板、纵向加劲肋六部分组成。运行机构包括起升机构、大车运行机构、小车运行机构。其中:起升机构由电动机、联轴器、减速器、制动器、卷筒、滑轮组、吊钩组等七部分组成;大车运行机构和小车运行机构均由相应的三合一减速电机、联轴器以及车轮组等三部分组成。安全装置包括限位装置、防超速装置、防碰撞装置等。因起重机种类繁多,本文仅针对单小车的通用桥式起重机,采用事故树分析方法[18],选取主要结构或零部件进行关键危险源辨识,其各类危险源如表2所示。
图3
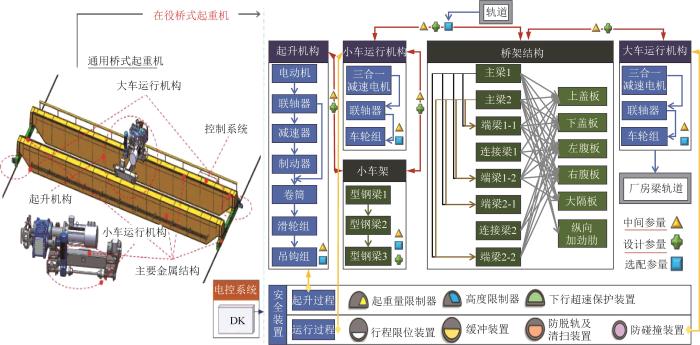
表2 桥式起重机各类危险源
Table 2
| 组成 | 结构/机构 | 零部件 | 危险源1 | 危险源2 | 危险源3 |
|---|---|---|---|---|---|
金属 结构 A1 | 桥架结构 B1 | 主梁C1 | 主体结构失稳D1 | 裂纹/断裂D2 | 弹性变形大/永久塑性变形D3 |
| 端梁C2 | 主体结构异常振动、晃动D4 | 裂纹/断裂D5 | 结构腐蚀、局部出现穿孔D6 | ||
| 连接梁C3 | 焊缝存在裂纹/气孔/固体夹杂/未熔合/未焊透等缺陷D7 | 结构腐蚀、局部出现穿孔D8 | 金属结构连接螺栓/销轴等小部件断裂/脱落D9 | ||
| 小车架B2 | — | 结构变形/扭曲D46 | 焊缝/连接点开裂D47 | 腐蚀D48 | |
运行机构 A2 | 大车运行机构B3 | 大车减速电机C4 | 制动器失效D10 | 齿轮/轴承磨损/断齿D11 | 电机过热/烧毁D12 |
| 大车联轴器C5 | 连接螺栓松动/断裂D13 | 弹性元件老化/损坏D14 | 对中不良导致磨损D15 | ||
| 大车车轮组C6 | 车轮裂纹等表面缺陷D16 | 轮缘磨损/塑性变形D17 | 车轮踏面磨损/塑性变形D18 | ||
| 小车运行机构B4 | 小车减速电机C7 | 制动器失效D19 | 齿轮/轴承磨损/断齿D20 | 电机过热或烧毁D21 | |
| 小车联轴器C8 | 连接螺栓松动/断裂D22 | 弹性元件老化/损坏D23 | 对中不良导致磨损D24 | ||
| 小车车轮组C9 | 车轮裂纹等表面缺陷D25 | 轮缘磨损/塑性变形D26 | 车轮踏面磨损和塑性变形D27 | ||
起升机构 B5 | 钢丝绳C10 | 钢丝绳断丝/断股/断绳D28 | 腐蚀/变形D29 | 钢丝绳的连接/固定不可靠D30 | |
| 滑轮组C11 | 无防脱槽装置/装置损坏D31 | 滑轮与侧板/顶板间隙过大D32 | 滑轮裂纹等表面缺陷D33 | ||
| 吊钩组C12 | 定位板松动、脱落D34 | 吊钩表面裂纹D35 | 吊钩磨损、腐蚀D36 | ||
安全装置 A3 | — | 行程限位装置C13 | 超过预定位置有可能发生危险时,相应限位装置缺失D37 | 行程开关布置不合理导致限位功能缺失/失效D38 | 传感器失效导致限位失效D39 |
| 防超速装置C14 | 限速装置缺失或损坏D40 | 传感器失效导致限速失效D41 | 系统故障导致限速失效D42 | ||
| 防超载装置C15 | 限载装置缺失或损坏D43 | 传感器失效导致限载失效D44 | 系统故障导致限载失效D45 |
2.2 危险源量化
1)模糊失效概率。
由于历史数据样本的数量与质量存在固有局限,且危险源失效概率在多因素动态影响下具有不确定性,在现有技术水平下,难以用精确数值对失效概率进行量化描述。为解决这一问题,通过构建不同维度的指标体系,结合基于权重分配的量化评分方法,提出了一种适用于桥式起重机危险源失效概率量化评估的多维度加权平均算法。该算法综合考虑多方面因素,能使评估结果更加全面、灵活且客观,有效弥补了传统方法的不足。
表3 专家分级准入条件与权重分配
Table 3
| 资质等级 | 基础资质 | 经验维度 | 评估能力 | 权重分配 |
|---|---|---|---|---|
| 资深专家 | 起重机安全/检验领域工作年限 | 桥式起重机设计/制造/检验/事故调查项目数量 | 每年参与行业技术研讨会 | 1.2 |
| 合格专家 | 起重机安全/检验领域工作年限5~10年;起重机检验员证书;机械/安全工程硕士 | 桥式起重机设计/制造/检验/事故调查项目数量 | 每年参加专业技术培训 | 1.0 |
| 实习专家 | 起重机安全/检验领域工作年限<5年;起重机操作/维修资格证书;相关专业本科及以上 | 协助桥式起重机设计/制造/检验/事故调查项目数量 | 完成岗前培训课程 | 0.8 |
表4 危险源多维度加权评分准则
Table 4
| 维度 | 依据 | 评分准则(1~5分) | 权重 | ||||
|---|---|---|---|---|---|---|---|
| 1分 | 2分 | 3分 | 4分 | 5分 | |||
| 历史发生频率 | 年事故/故障次数 | 3~4次 | 4~5次 | 6~8次 | 30%↑↓ | ||
| 设备老化与缺陷 | 年检验不合格项 | 0项 | 1~2项 | 3~4项 | 5~6项 | 20%↑↓ | |
| 人为操作风险 | 工作人员年违章次数 | 2~3次 | 4~5次 | 6~8次 | 20%↑↓ | ||
| 控制措施可靠性 | 安全装置年失效次数 | 2~3次 | 4~5次 | 6~8次 | 20%↑↓ | ||
| 环境诱发因素 | 高温/腐蚀/大风年暴露天数 | 30~90天 | 90~150天 | 150~200天 | 10%↑↓ | ||
根据专家的主观评分,利用
式中:S为加权总分,Mi 为专家对危险源每个维度的评分,βi 为危险源每个维度的权重,k为维度数量。
式中:
表5 专家术语评级规则
Table 5
| 专家术语评级 | 三角模糊数/10-3 |
|---|---|
| 低(S<1) | (0, 1, 2) |
| 较低(1 | (2, 3, 4) |
| 中等(2 | (4, 5, 6) |
| 较高(3 | (6, 7, 8) |
| 高(S | (8, 9, 10) |
在多个专家针对单一危险源给出多个三角模糊失效概率值后,对所有评估结果进行合并,形成三角犹豫模糊集A:
式中:X为论域;
在获得三角犹豫模糊集后,对所有的三角模糊数进行加权平均并乘以专家的权重λ,得到聚合后的失效概率P,以此消除专家个人主观性的影响。
为便于计算,按
2)模糊失效程度。
因危险源所导致的起重机失效程度存在不确定性,采用模糊数对失效程度进行描述。通常将失效程度描述为[0, 1]内的模糊数,其中:0表示正常,0.5表示为中度失效,1表示为高度失效。为了使用方便且不失一般性,本文选用梯形隶属函数,如图4所示。
图4
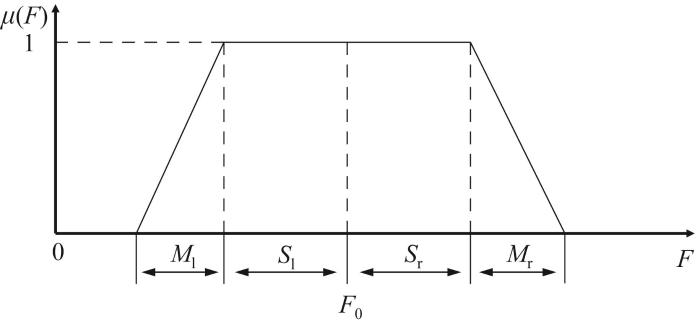
根据图4,梯形隶属函数的逻辑表达如下:
其中:
式中:
当模糊数的左、右支撑半径均为0时,梯形隶属函数变为三角形隶属函数;当左、右支撑半径和模糊区间均为0时,模糊数变为一个确定数值。
3 基于FFT-BN的桥式起重机危险等级评估模型
3.1 FFT模型
1)T-S(Takagi-Sugeno)模糊故障树。
图5
T-S模型是由一系列IF-THEN模糊规则组成的万能逼近器,用于描述各事件之间的联系,从而构成T-S模糊门。在T-S模糊事故致因模型中,以规则l(l=1, 2,…, m)作为约束条件,以n个底事件作为输入变量x(x1, x2, …, xn ),经过规则l获得一个上级事件作为输出yl。令底事件的模糊集为Flj (j=1, 2, …, n),其对应的隶属函数为
其中:
式中:
假设底事件和某一上级事件的模糊失效程度分别为x(x1, x2,…, xn )和yl,则对应的模糊数可分别描述为
利用上述T-S模糊门可实现2种功能算法:功能1,由下级事件的模糊可能性计算上级事件的失效概率;功能2,由下级事件的当前状态计算上级事件的失效概率。
对于功能1,在规则l(l=1, 2,…, m)的约束下,设底事件各种失效程度的模糊可能性分别为
对于功能2,已知底事件的失效程度为
式中:
2)故障树重要度。
重要度用于衡量底事件发生概率对顶事件的影响程度,在系统可靠性设计与故障诊断等领域具有重要作用。将重要度纳入桥式起重机危险源安全评价指标体系,从概率重要度和关键重要度两个维度,对各类危险源开展全面的安全评估。
对于概率重要度Pr,底事件xj 对应故障程度
式中:
将所有底事件的概率重要度进行综合处理,得到其概率重要度:
式中:z为底事件非0故障程度数,本文取z=2。
关键重要度Cr包含底事件的概率重要度和底事件与系统的故障概率比,可以客观表征底事件对系统故障的影响程度。当底事件xj 故障程度为
式中:
3.2 FFT-BN模型
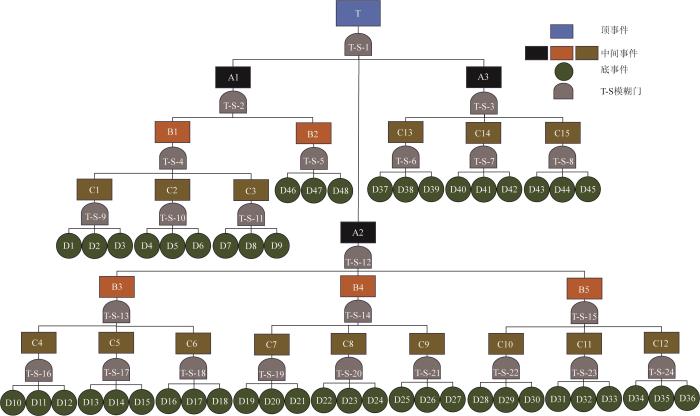
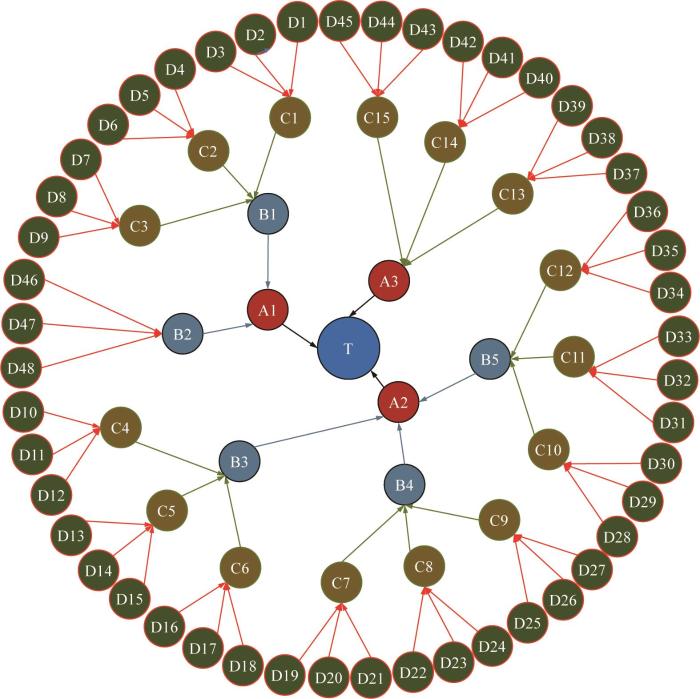
BN以有向无环图为结构载体,由节点与有向边构成。其中,每个节点均对应一个随机变量,节点间的有向边可直观反映变量之间的条件概率关联。从节点功能来看,根节点为没有前驱输入的起始节点,叶节点为不存在后继输出的终端节点,而中间节点兼具前驱输入与后继输出,是网络中传递信息的关键枢纽。在概率表征方面,根节点通过先验概率描述自身处于不同状态的可能性;非根节点依赖条件概率,在父节点状态已知的前提下,明确其自身呈现不同状态的概率分布,以此构建完整的变量逻辑关系网络。相较于传统的故障树分析方法,基于T-S模糊故障树构建BN模型时,无需进行复杂的不交化处理,也无需确定最小割集。这一特性有效避免了不交化过程中烦琐的布尔代数运算与逻辑推导,极大提升了系统可靠性分析的效率与准确性。T-S模糊故障树转BN模型的流程如图6所示,以此为基础构建FFT-BN模型,如图7所示。
图6
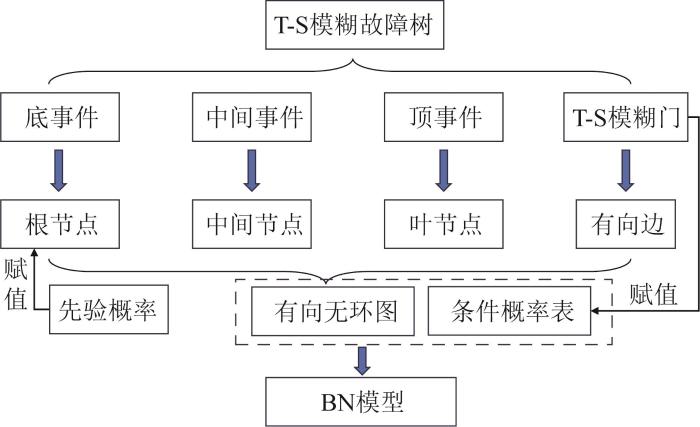
图6
T-S模糊故障树转BN模型的流程
Fig.6
Process of T-S fuzzy fault tree conversion to BN model
图7
如图6所示,T-S模糊故障树与BN模型具有如下映射关系:T-S模糊故障树中的底事件对应BN中的根节点,中间事件对应中间节点,顶事件对应叶节点,T-S模糊门对应有向边,T-S模糊门规则对应条件概率。
BN中各节点的条件概率关系由T-S模糊门规则确定。假设T-S模糊门的输入事件与输出事件分别为x(x1, x2, …, xn )和y,其失效状态分别表示为
BN的逻辑推理包括正向推理和逆向推理。对于正向推理,基于BN模型中根节点处于不同状态时的条件概率以及各节点条件概率之间的关联,可运用正向推理方法来计算顶事件处于各类危险状态的概率。此时,若将节点x(x1, x2, …, xn )分别对应T-S模糊故障树的底事件和中间事件,则顶事件T处于危险状态Tq的条件概率为:
式中:
对于逆向推理,已知顶事件T处于危险状态Tq时,反推底事件xj 处于失效状态
式中:
3.3 危险等级划分方式
后验概率与关键重要度是危险评估的2项重要指标。后验概率指已知叶节点处于危险状态时,根节点处于各失效状态的概率,侧重于由已知结果推断原因发生的可能性;关键重要度衡量底事件对顶事件发生概率的影响程度,反映底事件发生概率变化引发顶事件发生概率变化的相对大小,侧重于评估底事件对系统整体危险的影响,以找出关键危险因素。
利用危险矩阵[20]对后验概率与关键重要度进行融合分析,这样既能避免单一指标的局限性,又能综合考虑不同角度的信息,从而更全面地对桥式起重机的潜在危险源进行危险等级划分。
将后验概率(可能性)和关键重要度(严重度)分别划分为5个等级,如表6所示。
表6 后验概率和关键重要度等级划分
Table 6
| 指标 | 等级区间 | ||||
|---|---|---|---|---|---|
| 极低(V) | 低(L) | 中等(M) | 高(H) | 极高(K) | |
| 后验概率 | [0, 0.006) | [0.006, 0.015) | [0.015, 0.021) | [0.021, 0.028) | [0.028, 1.000] |
| 关键重要度 | [0, 0.003) | [0.003, 0.011) | [0.011, 0.014) | [0.014, 0.016) | [0.016, 1.000] |
对于危险矩阵的构建,首先建立5×5矩阵,其中行表示后验概率等级(由高到低),列表示关键重要度等级(由高到低),行列交叉形成的矩阵 A 用于表示评估对象的综合状态,如下所示:
随后,将综合状态划分为5个等级R1~R5,并为每个综合状态分配危险等级,分配原则如表7所示。
表7 危险等级划分
Table 7
| 关键重要度 | 后验概率 | ||||
|---|---|---|---|---|---|
| V | L | M | H | K | |
| V | R1 | R1 | R2 | R3 | R4 |
| L | R1 | R2 | R2 | R3 | R4 |
| M | R2 | R2 | R3 | R4 | R5 |
| H | R3 | R3 | R4 | R4 | R5 |
| K | R4 | R4 | R5 | R5 | R5 |
4 桥式起重机危险等级评估系统
以桥式起重机危险源辨识及量化方法为基础,利用基于FFT-BN的危险等级评估模型,结合功能模块设计,依据系统开发流程,搭建桥式起重机危险等级评估系统平台,并设计用于宏观展示的系统界面,以此实现桥式起重机危险等级的快速评估。
4.1 功能模块设计
桥式起重机危险等级评估系统包括三大模块。
1)危险源辨识及量化模块。根据2.1节中的危险源辨识过程,对桥式起重机的结构/零部件及危险源进行筛选辨识。模块内设置专家评价调查环节,由具备相应资质的专家针对危险源在各个维度上的表现进行专业评价。在评价过程中,专家可结合具体的起重机服役场景,灵活调整不同维度的评分权重,从而确保评分结果与实际工况的高度匹配性。在完成专家评价后,将桥式起重机的结构/零部件固有信息、危险源信息及对应各维度的评分数据,均以原始数据的形式存储到数据库中,进而构建覆盖全面且贴合起重机实际服役场景的危险源特征清单。该清单清晰呈现了“专家资质—结构/零部件—危险源—专家评分”的对应关系,用户可通过输入关键词来实现对特定起重机危险源的快速查询。在此基础上,模块结合危险源量化方法,对各类危险源进行量化分析,计算得到对应的模糊失效概率,并将该概率值同步存储至数据库,为后续的评估等工作提供数据支撑。
2)危险等级评估模块。在实际应用过程中,桥式起重机的危险等级评估工作以FFT-BN模型为核心支撑。用户可根据具体的评估场景,灵活选择或调整模型的相关参数,其中T-S模糊门规则即为模型的典型参数。借助评估模块,能够自动完成危险源模糊失效概率与评估模型中根节点输入参数的映射过程,并以此生成对应的危险等级。用户通过系统界面,可直观查看或精准查询桥式起重机结构及各零部件的失效概率、危险源的后验概率和关键重要度以及危险等级等各类评估结果。
3)信息数据管理模块。一方面,该模块用于对原始数据(专家资质—结构/零部件—危险源—专家评分)、业务数据(如起重机各零部件的失效概率,危险源的模糊失效概率、后验概率和关键重要度等)以及决策数据(危险等级划分结果)进行分类和管理;另一方面,该模块支持对数据库内的信息进行查询、添加、修改和删除等操作。
4.2 系统平台开发流程
图8
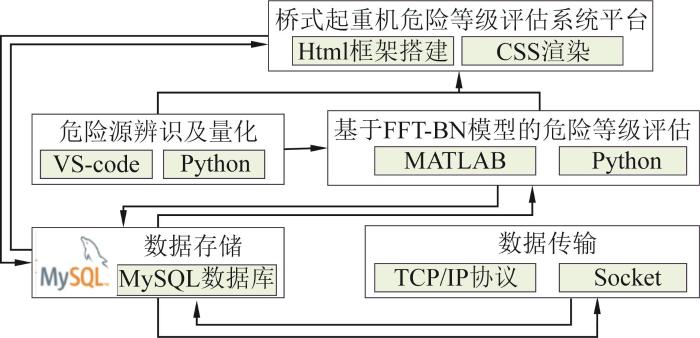
图8
桥式起重机危险等级评估系统平台开发流程
Fig.8
Development process of hazard level assessment system platform for bridge crane
表8 相关应用软件程序及版本
Table 8
| 软件名称 | 功能作用 | 版本影响因素 | 关键匹配关系 | 版本号 |
|---|---|---|---|---|
| VS-code | 开发Python通信协议、前端界面,支持串口通信调试 | 插件兼容性(Python、JS相关插件),多语言开发体验,支持调试功能 | 无强制版本依赖,支持JS/HTML/Python的语法高亮与调试工具 | v1.98 |
| Python | 编写TCP/IP、Socket通信协议,连接MySQL、MATLAB及前端系统界面 | PyMySQL、Pyserial等数据库的兼容性,数据处理性能与MATLAB版本相匹配 | 匹配MATLAB R2022a+的MATLAB Engine,支持MySQL 8.0的加密方式 | 3.10 |
| MySQL | 存储原始数据、业务数据、决策数据等,支持多端数据读写 | 加密方式兼容性,数据类型(浮点数、Json文件)兼容性 | 被Python、MATLAB及JS脚本(MySQL2库)访问 | 8.0.34 |
| MATLAB | 构建FFT-BN模型,开展危险等级评估及划分,并回传结果至数据库 | 支持Fatigue Toolbox、Database Toolbox等工具箱;支持与Python/MySQL的交互计算 | 通过MATLAB Engine兼容Python 3.8—3.10,且支持MySQL 8.0的数据读写 | R2022a |
如图8所示,评估系统利用MySQL数据库存储原始数据,其核心处理模块基于Python开发,通过TCP/IP(transmission control protocol/internet protocol,传输控制协议/网际协议)、Socket通信协议访问数据库并调用数据,执行危险源辨识及量化计算,并将生成的模糊失效概率作为关键业务数据写入数据库存储。在MATLAB环境中,系统加载预先构建的评估模型(FFT-BN)并配置T-S模糊门规则,调用数据库中的模糊失效概率数据并将其映射至评估模型的根节点,执行评估计算后得到起重机结构/零部件的失效概率、危险源的后验概率和关键重要度,所有结果均传回数据库以进行持久化储存。随后,核心处理模块进一步调用数据库中的评估结果,结合危险矩阵对危险源进行等级划分。最终,所有处理结果(包括量化数据、评估结果和危险等级)均通过基于HTML/CSS(hypertext markup language/cascading style sheets,超文本标记语言/层叠样式表)技术构建的系统前端界面实现可视化展示。
结合功能模块设计,依照系统开发流程搭建系统平台,相应的系统界面如图9所示。该平台从三大模块入手进行设计,包括功能按钮区及可视化图表区。前者包括“危险源辨识”“危险源量化”“危险评估”“危险等级划分”“信息数据管理”“平台系统退出”等6个按钮;后者包括整机参数、模型参数、评估数据信息可视化呈现等。
图9

图9
桥式起重机危险等级评估系统平台主界面
Fig.9
Main interface of hazard level assessment system platform for bridge crane
5 工程实例
以在役QD40 t-22.5 m-9 m通用桥式起重机为对象,利用桥式起重机危险等级评估系统平台,实现该起重机的危险等级评估,以验证所提出方法的科学性及系统平台的有效性。
5.1 危险源辨识及量化
图10

表9 根节点的模糊失效概率
Table 9
| 根节点 | 模糊失效概率/10-3 | 根节点 | 模糊失效概率/10-3 | 根节点 | 模糊失效概率/10-3 | 根节点 | 模糊失效概率/10-3 | 根节点 | 模糊失效概率/10-3 | 根节点 | 模糊失效概率/10-3 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| D1 | (4, 5, 6) | D9 | (6, 7, 8) | D17 | (6, 7, 8) | D25 | (6, 7, 8) | D33 | (4, 5, 6) | D41 | (4, 5, 6) |
| D2 | (6, 7, 8) | D10 | (6, 7, 8) | D18 | (6, 7, 8) | D26 | (4, 5, 6) | D34 | (8, 9, 10) | D42 | (6, 7, 8) |
| D3 | (4, 5, 6) | D11 | (8, 9, 10) | D19 | (8, 9, 10) | D27 | (8, 9, 10) | D35 | (6, 7, 8) | D43 | (4, 5, 6) |
| D4 | (6, 7, 8) | D12 | (6, 7, 8) | D20 | (8, 9, 10) | D28 | (8, 9, 10) | D36 | (6, 7, 8) | D44 | (2, 3, 4) |
| D5 | (6, 7, 8) | D13 | (4, 5, 6) | D21 | (2, 3, 4) | D29 | (6, 7, 8) | D37 | (8, 9, 10) | D45 | (6, 7, 8) |
| D6 | (6, 7, 8) | D14 | (6, 7, 8) | D22 | (4, 5, 6) | D30 | (6, 7, 8) | D38 | (8, 9, 10) | D46 | (4, 5, 6) |
| D7 | (6, 7, 8) | D15 | (6, 7, 8) | D23 | (6, 7, 8) | D31 | (6, 7, 8) | D39 | (4, 5, 6) | D47 | (6, 7, 8) |
| D8 | (6, 7, 8) | D16 | (4, 5, 6) | D24 | (4, 5, 6) | D32 | (4, 5, 6) | D40 | (6, 7, 8) | D48 | (6, 7, 8) |
5.2 危险等级评估
假设各事件的常见失效程度为(0,0.5,1)。专家或操作人员可根据历史数据及实际情况,在系统平台内调整T-S模糊门规则。以T-S模糊门9为例,与中间事件C1有关的危险源为D1、D2和D3,将上述3个底事件作为模糊门9的输入,如表10所示,其余情况与此类似。在完成逻辑规则制定后,点击“危险评估”按钮,系统平台利用封装好的FFT-BN模型将危险源的模糊失效概率映射到评估模型的根节点中,基于各根节点的模糊失效概率计算得到中间节点及叶节点的模糊失效概率。为了便于推理,假设所有根节点发生中度失效(即失效程度为0.5)的概率与发生高度失效(失效程度为1.0)相同。根据表9所示的底事件模糊失效概率,利用T-S模糊门逐层向上推理聚合,可得到中间节点失效程度分别为0.5和1.0时的概率,如表11所示。
表10 T-S模糊门9
Table 10
| 序号 | D1 | D2 | D3 | C1 | ||
|---|---|---|---|---|---|---|
| 0 | 0.5 | 1.0 | ||||
| 1 | 0 | 0 | 0 | 1.0 | 0.0 | 0.0 |
| 2 | 0 | 0 | 0.5 | 0.1 | 0.6 | 0.3 |
| 3 | 0 | 0 | 1 | 0.0 | 0.0 | 1.0 |
| 4 | 0 | 0.5 | 0 | 0.3 | 0.7 | 0.0 |
| 5 | 0 | 0.5 | 0.5 | 0.0 | 0.4 | 0.6 |
| 6 | 0 | 0.5 | 1 | 0.0 | 0.0 | 1.0 |
| 7 | 0 | 1 | 0 | 0.0 | 0.2 | 0.8 |
| 8 | 0 | 1 | 0.5 | 0.0 | 0.1 | 0.9 |
| 9 | 0 | 1 | 1 | 0.0 | 0.0 | 1.0 |
| … | … | … | … | … | … | … |
| 26 | 1 | 1 | 0.5 | 0.0 | 0.0 | 1.0 |
| 27 | 1 | 1 | 1 | 0.0 | 0.0 | 1.0 |
表11 中间节点的失效概率
Table 11
| 中间节点 | 失效程度 | 中间节点 | 失效程度 | 中间节点 | 失效程度 | |||
|---|---|---|---|---|---|---|---|---|
| 0.5 | 1.0 | 0.5 | 1.0 | 0.5 | 1.0 | |||
| C1 | 0.011 | 0.018 | C9 | 0.014 | 0.025 | B2 | 0.013 | 0.026 |
| C2 | 0.009 | 0.015 | C10 | 0.014 | 0.024 | B3 | 0.024 | 0.075 |
| C3 | 0.012 | 0.020 | C11 | 0.012 | 0.021 | B4 | 0.023 | 0.070 |
| C4 | 0.015 | 0.027 | C12 | 0.015 | 0.027 | B5 | 0.024 | 0.076 |
| C5 | 0.012 | 0.020 | C13 | 0.009 | 0.017 | A1 | 0.085 | 0.018 |
| C6 | 0.014 | 0.025 | C14 | 0.011 | 0.018 | A2 | 0.038 | 0.211 |
| C7 | 0.013 | 0.022 | C15 | 0.010 | 0.016 | A3 | 0.018 | 0.054 |
| C8 | 0.012 | 0.020 | B1 | 0.019 | 0.055 | |||
利用
其中:
根据表11,计算得到叶节点失效程度分别为0.5和1.0的概率为0.070和0.279。
图11

表12 桥式起重机危险等级划分
Table 12
| 危险等级 | 危险源 |
|---|---|
| R1 | D1、D3、D6、D46、D47、D48 |
| R2 | D2、D4、D5、D7、D8、D9、D15、D21、D24、D30、D32、D37、D38、D40、D42、D43、D45 |
| R3 | D13、D14、D20、D22、D23、D41 |
| R4 | D12、D17、D18、D26、D27、D31、D33、D34、D39、D44 |
| R5 | D10、D11、D16、D19、D25、D28、D29、D35、D36 |
5.3 信息数据管理
点击“信息数据管理”按钮,系统平台连接数据库,成功读取并显示数据。此外,在危险源辨识及量化过程中产生的业务数据反馈至危险等级评估模块,并推送至系统平台界面进行显示。同时,所有数据传回数据库分类存储管理,以实现数据增/删/改/查等操作,如图12所示。
图12

综上所述,基于系统平台各模块的联动机制,先按“危险源辨识→危险源量化→危险评估→危险等级划分”的顺序启动功能按钮,依次进入危险源辨识及量化模块与危险等级评估模块,各模块的执行结果通过子界面或可视化图表区实时展示;随后,点击“信息数据管理”按钮,进入信息数据管理模块,实现对原始数据及评估过程衍生数据的上传、存储与管理。最后,点击“平台系统退出”按钮,退出平台。多轮验证测试结果表明:所提出的方法具备工程可行性与场景适用性;同时,系统平台的功能完整性及开发流程的逻辑正确性也得到了有效验证。
5.4 结果分析及讨论
上述工程实例有效验证了本文所提出方法及系统的科学性和适用性,现从评估方法和操作系统两方面进行定性分析与讨论。
在评估方法方面,现有的FFT评估方法[21]和BN评估方法[22]存在运算复杂度高、构建效率低、参数确定困难等局限性,而本文所提出的评估方法(FFT-BN)融合了2种模型的互补优势,在处理不确定性、建模灵活性、推理能力及计算特点等方面显著提升。3种评估方法的性能对比如表13所示。由表13可知,与FFT和BN模型相比,FFT-BN模型具备以下优势:1)通过融合模糊逻辑与概率理论,能够全面处理复杂的不确定性问题,有效增强了模型对不确定信息的表征能力;2)突破了FFT结构固定的局限,实现了模型结构的可扩展性,显著提升了建模过程的灵活性;3)支持不确定性推理与多状态推理机制,弥补了FFT仅依赖布尔逻辑所导致的推理能力薄弱缺陷;4)通过优化推理算法大幅降低了计算复杂度,有效减轻了计算负担,显著提升了计算效率;5)借助高效的BN双向推理算法进行处理,拓展了模型在大规模场景中的适用范围;6)逻辑结构直观且信息传递透明,便于使用者理解模型原理,具备较高的可解释性。
表13 桥式起重机危险等级评估方法性能对比
Table 13
| 评估模型 | 不确定性 | 建模灵活性 | 推理能力 | 计算效率 | 适用规模 | 可解释性 |
|---|---|---|---|---|---|---|
| FFT | 中等 | 较低 | 较弱 | 较低 | 弱 | 高 |
| BN | 较高 | 较高 | 强 | 中等 | 强 | 较低 |
| FFT-BN | 高 | 高 | 强 | 较高 | 强 | 高 |
在操作系统方面,本文所开发的系统在危险等级评估方面具有显著优势:1)响应时间大幅缩短,能更快速处理复杂任务,满足实时性要求高的场景;2)稳定性显著增强,有效降低危险故障发生率,保障了业务的连续性;3)操作便捷性显著提升,所设计的交互界面简洁直观,用户学习成本降低,操作效率提高。
尽管本文所开发的系统优势显著,但在某些方面仍有进一步优化的空间。例如:在功能完整性上,部分特殊业务场景的需求尚未完全覆盖,需进一步调研完善;在数据安全性方面,现有防护机制存在一定风险,需加强加密算法和安全策略。此外,系统兼容性有待提升,在不同操作系统和设备上的适配性还需进一步测试和优化。
6 结 论
1)提出了一种基于FFT-BN模型的桥式起重机危险等级评估方法,在危险源辨识及量化的基础上,通过引入BN的双向推理机制,成功实现了从故障现象到故障原因溯源的逆向诊断推理;借助参数优化技术,显著降低了模型的计算复杂度;依托所构建的T-S模糊门规则,进一步提升了模型的构建效率。该方法融合了FFT与BN的互补优势,有效克服了传统T-S模糊故障树模型运算复杂度高、仅支持自上向下单向逻辑推理的局限性,为桥式起重机的危险等级评估提供了更高效、更全面的技术解决方案。
2)开发了专用型桥式起重机危险等级评估系统平台,实现了评估流程的智能化革新,将传统依赖人工手动编码的建模分析模式转化为直观便捷的可视化交互操作模式。通过内置的算法与标准化模板,系统平台能够自动生成专业规范的评估报告,有效地消除了传统评估流程中因人为操作差异而导致的评估偏差,显著提升了桥式起重机危险等级评估的标准化水平,大幅缩短了评估周期。
本研究的核心成果体现在以下方面:依托自主搭建的专业型系统平台,实现了对桥式起重机服役过程中各类危险源的精准辨识;通过完整的指标量化体系,对危险源进行了精确的量化表征;在综合考虑多因素耦合效应的基础上,运用FFT-BN模型完成了起重机危险等级划分。基于上述评估结果,可对高风险危险源实施针对性优化设计与防控措施,以实现从设计源头显著提升起重机的本质安全性,最大限度降低事故发生概率。为验证所提出方法的可行性与适用性,以QD 40 t-22.5 m-9 m通用桥式起重机为工程实例开展验证分析,取得了理想效果。未来研究将重点聚焦于T-S模糊门规则的优化改进,旨在进一步降低评估模型的结构复杂度。值得注意的是,该方法的应用范围不仅局限于桥式起重机,对于同样面临严峻安全管理挑战的流动式起重机、塔式起重机及臂架式起重机,只需依据其独特的结构特性与工况条件调整相应参数,即可实现推广应用,展现出广阔的工程应用前景。
参考文献
3D reconstruction of coal pile based on visual scanning of bridge crane
[J].
基于模糊故障树的建筑施工高处坠落全面风险评估
[J].
Comprehensive risk assessment of building construction falling from height based on fuzzy fault tree
[J].
Structure model-based hazard identification method for autonomous ships
[J].
Safety risks assessment on container terminal using hazard identification and risk assessment and fault tree analysis methods
[J].
Preliminary hazard identification for qualitative risk assessment on onboard hydrogen storage and supply systems of hydrogen fuel cell vehicles
[J].
基于BIM技术的大型水闸工程施工危险源辨识系统设计
[J].
Identification system design of hazard sources of large-scale sluice engineering based on BIM technology
[J].
Fuzzy logic-based expert evaluation of tram driver's console fidelity in a universal simulator
[J].
A cloud model-based approach for risk analysis of excavation system
[J].
A holistic FMEA approach by fuzzy-based Bayesian network and best-worst method
[J].
The comprehensive safety assessment method for complex construction crane accidents based on scenario analysis: a case study of crane accidents
[J].
Safety assessment method of bridge crane based on cluster analysis and neural network
[J].
Risk assessment of crane operation hazards using modified FMEA approach with Z-number and set pair analysis
[J].
基于云模型和组合赋权的岸边集装箱桥式起重机金属结构安全评估
[J].
Safety assessment of quayside container crane metal structures based on cloud modeling and DEMATEL-CRITIC
[J].
Dynamic risk assessment of tower crane operations by integrating functional resonance analysis method and Bayesian network
[J].
基于事故树分析的重大事故隐患评判方法
[J].
Evaluation method for major accident hazards based on accident tree analysis
[J].
q阶三角犹豫模糊BM算子及其多属性决策应用
[J].
q-rung hesitant triangular fuzzy BM operator and its application in multiple criteria decision making
[J].
基于风险矩阵的干线公路弯道路段交通冲突风险评估模型
[J].
Risk assessment model based on risk matrix for traffic conflict on arterial highway bend section
[J].
基于T-S模糊故障树的煤矿坑道钻机液压动力系统故障诊断研究
[J].
Fault diagnosis of hydraulic power system for coal mine tunnel drilling rig based on T-S fuzzy fault tree
[J].
基于健康监测数据和贝叶斯网络的结构失效概率评估
[J].
Failure probability estimation for structures based on health monitoring data and Bayesian network
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}