


目前,国内外针对困油现象的研究大多聚焦于外啮合齿轮泵领域。对于双齿啮合或单齿啮合所引发的困油现象[8-10],其卸荷技术已相对成熟,且相关成果被广泛应用于齿轮泵的设计与制造环节[11-14]。在此基础上,国内学者结合CFD(computational fluid dynamics,计算流体力学)仿真技术,进一步对齿轮泵卸荷槽的尺寸与布置展开了优化设计,显著提升了齿轮泵在高黏度液体介质输送工况下的运行稳定性。其中,李玉龙团队构建了一条完整的技术研究路径:以重合度为切入点[15],依次探究其对困油流量[16]、卸荷流量[17]、卸荷面积[18]、困油压力[19]及泵体性能[20]的影响规律,并最终实现了卸荷槽结构的创新设计[21],提出了一种对称双卸荷槽微连通结构[22]。相比之下,针对罗茨泵困油现象的研究存在明显不足。现阶段,仅国外少数研究关注罗茨泵在液体介质输送过程中的性能波动问题,但均未与困油现象建立关联,更未深入剖析其本质机理。国内研究大多围绕罗茨泵的气体输送性能展开,如转子轮廓优化、泄漏量控制等,对困油问题的关注极少,且缺乏对不同转子轮廓下困油特性差异的对比分析,也未形成有效的困油缓解措施。
鉴于此,本文拟对罗茨泵的困油现象进行深入研究,并提出针对性的缓解措施。首先,通过参数化建模方法构造全工作型和非全工作型两类转子轮廓,并建立对应的罗茨泵CFD仿真模型,模拟高黏度液体介质输送工况下罗茨泵内部流场的演变特性,以明确其困油现象的产生机理。随后,通过量化2类转子轮廓的困油危害差异,提出兼具实用性和高效性的困油卸荷方案,旨在为罗茨泵的结构优化与工况适配提供理论支撑,进而推动其在高黏度液体输送领域的规模化应用。
1 罗茨泵的转子轮廓及几何模型
1.1 转子轮廓的参数化构造
罗茨泵转子的轮廓曲线类型多样,除了圆弧、渐开线和摆线等3种常见类型外,还有直线、椭圆弧、抛物线、双曲线和正弦曲线等。根据转子轮廓顶部与根部是否存在圆弧过渡,总体上可将其划分为全工作型轮廓(如圆弧轮廓)与非全工作型轮廓(如渐开线轮廓)两类。轮廓构造差异将直接影响泵内介质在转子啮合过程中的流动特性及困油现象的严重程度。2类转子轮廓的参数化构造如图1所示。
图1
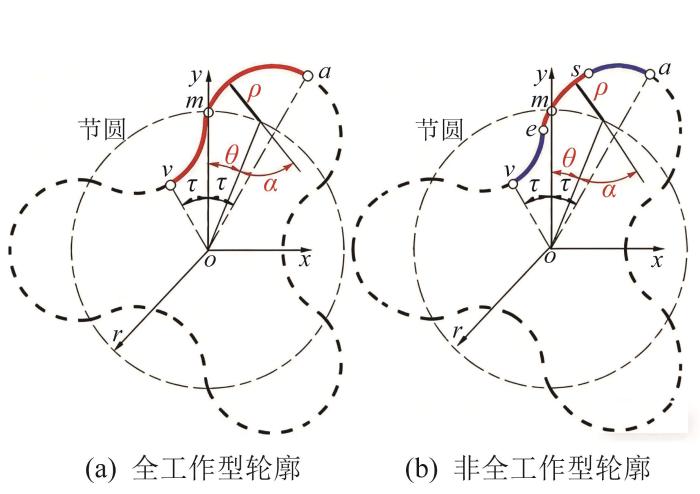
图1
罗茨泵转子轮廓的参数化构造
Fig.1
Parametric construction of rotor profile for Roots pump
1)全工作型轮廓(如圆弧轮廓):由节圆外工作轮廓(am段圆弧)与节圆内工作轮廓(mv段)两部分组成,顶部和根部无额外的过渡圆弧。
2)非全工作型轮廓(如渐开线轮廓):由节圆外工作轮廓(sm段)、节圆内工作轮廓(me段)、顶部过渡圆弧(as段)及根部过渡圆弧(ve段)四部分组成。其中,as、ve段圆弧的圆心分别为线段oa、ov与节圆的交点。
为量化转子轮廓的特征,定义以下关键结构参数。
1)形状系数ε:顶圆半径R与节圆半径r的比值,即ε=R/r。
2)叶形半角γ:γ=π/(2Z),Z为转子叶数。
3)形状系数上限εmax:形状系数ε的最大允许值,需满足转子啮合无干涉的条件。其中,在同一轮廓曲线下,形状系数上限εmax由转子叶数Z唯一确定。
4)容积利用系数λ(又称容积效率):泵内的有效介质空间与理论设计空间之比。
采用文献[23]中的转子轮廓构造方法,在坐标系o-xy(坐标原点位于转子中心处)下建立转子工作轮廓段的参数方程:
式中:θ为相位角(-γ≤θ≤γ),对于节圆内工作轮廓,-γ≤θ≤0°,对于节圆外工作轮廓,0°≤θ≤γ;ρ为法向啮合长度;α为传动角。
不同类型转子轮廓的构造区别在于:法向啮合长度ρ和传动角α的定义不同,具体可参见文献[23]。现以渐开线轮廓(非全工作型轮廓)和圆弧轮廓(全工作型轮廓)为例展开相关说明。
渐开线轮廓对应的法向啮合长度ρ和传动角α定义如下:
根据
圆弧轮廓对应的法向啮合长度ρ和传动角α定义如下:
式中:当-γ≤θ≤0°时,
根据
其中:
1.2 罗茨泵几何模型构建
根据上述参数化方程,结合罗茨泵的实际运行需求,确定其转子轮廓及几何模型的关键参数,如表1所示(以三叶转子为例)。其中:采用较小节圆半径(30 mm)和较小形状系数(1.45),可有效抑制罗茨泵进口处可能会出现的介质填充不足与空化现象。由此可得,渐开线、圆弧转子的容积利用系数分别为0.492 3、0.487 3,两者基本一致,说明容积利用系数主要由形状系数确定,工作轮廓曲线类型的影响不大。
表1 罗茨泵转子轮廓及几何模型的关键参数
Table 1
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 转子叶数 | 3 | 径向间隙/mm | 0.10 |
| 形状系数 | 1.45 | 啮合间隙/mm | 0.20 |
| 节圆半径/mm | 30 | 轴向间隙/mm | 0.15 |
| 转子宽度/mm | 120 | 轴孔半径/mm | 12 |
| 壳壁半径/mm | 43.5 |
采用Siemens NX软件对罗茨泵进行几何建模,具体步骤如下:
1)依序录入形状系数、转子叶数等参数,构造转子工作轮廓参数方程,以生成转子叶工作轮廓曲线;
2)基于转子叶工作轮廓曲线构建转子三维模型,并通过向内偏置0.10 mm的方式设置主、从动转子之间的啮合间隙,以确保啮合无干涉且符合实际间隙要求;
3)整合轴孔、壳壁等结构,生成完整的罗茨泵三维几何模型(如图2所示),并导出STL格式文件,为后续的CFD仿真提供网格生成基础。
图2

基于上述理论基础及参数化建模方法,本文结论适用于任意轮廓曲线类型和任意转子叶数的罗茨泵。
2 罗茨泵的CFD仿真模型
2.1 仿真模型构建与网格生成
采用泵用专业软件Pumplinx构建罗茨泵的CFD仿真模型。该软件集成转子专用网格模块与通用网格模块,可实现高质量间隙网格的自动生成,从而有效捕捉转子啮合间隙内的介质流动细节,误差较小。文献[24]指出:该软件的仿真结果与实验结果的最大误差仅为4.2%。罗茨泵仿真模型的网格生成流程如下:
1)导入STL格式的罗茨泵几何模型,利用转子专用网格模块生成转子区域网格,并采用“高级生成模式”确保网格精度与质量;
2)利用通用网格模块生成进、出口区域网格;
图3
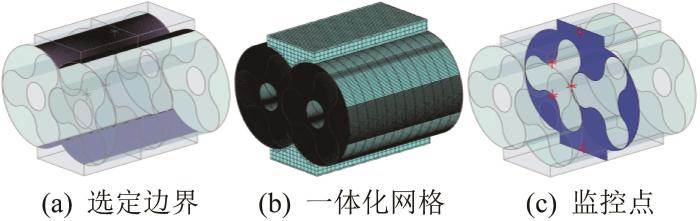
图3
罗茨泵仿真模型及监控点设置
Fig.3
Roots pump simulation model and monitoring point setting
2.2 介质参数与边界条件设置
选取高黏度液压油作为工作介质,结合罗茨泵的实际运行工况,确定介质参数与边界条件,如表2所示。同时,设置监控点以实时监测泵内关键位置的性能参数:
表2 仿真介质及边界条件参数
Table 2
| 参数 | 数值 |
|---|---|
| 液压油动力黏度/(Pa·s) | 0.03 |
| 液压油密度/(kg·m-3) | 850 |
| 液压油体积弹性模量/Pa | 1.5×109 |
| 液压油饱和蒸气压/Pa | 400 |
| 转速/(r/min) | 1 000 |
| 角速度/(rad·s-1) | 104.72 |
| 进口压力/Pa | 1.013 2 |
| 出口压力/Pa | 1.013 2 |
1)进、出口监控点:采用“Stationary”固定类型,监测进、出口的压力和流量变化。
2)转子根部监控点:设置3个监控点(i=0, 1, 2),采用“Prescribe Motion”同步运动类型,使监控点随转子同步旋转,以监测转子根部介质压力的波动情况。监控点动态坐标(x', y', z')的表达式如下:
式中:t为系统默认的仿真运行时间;r(2-ε)为转子根圆半径,r(2-ε)=0.016 5 m;ω为转子角速度;δ₂为轴向间隙。
除仿真运行时间t外,详细仿真步骤参见文献[25]。
2.3 性能参数定义
在仿真过程中,选取以下性能参数对罗茨泵进行评估与对比:瞬时介质压力p;主动转子的瞬时、平均输入功率P、Pₐᵥₑ;主动转子的X、Y向液压力FX 、FY;瞬时、平均输出流量Q、Qₐᵥₑ。需要说明的是,流量与功率以流出/输出泵的方向为正,反之为负。
3 罗茨泵仿真结果及分析
3.1 仿真结果
图4
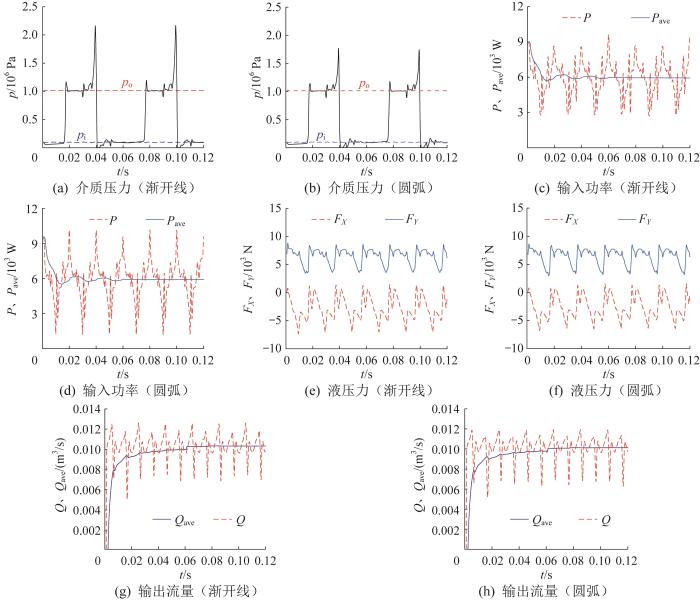
表3 罗茨泵的介质压力、输入功率和输出流量对比
Table 3
| 参数 | 渐开线罗茨泵 | 圆弧罗茨泵 |
|---|---|---|
| p/Pa | 2 062~2.16×106 | 1 794~1.71×106 |
| 113.3 | 68.7 | |
| 98.0 | 98.2 | |
| P/W | 3 617~8 529 | 3 340~8 396 |
| Qₐᵥₑ/(m3/s) | 0.010 28 | 0.010 16 |
由图4可知,2种罗茨泵的瞬时介质压力、主动转子输入功率、液压力及输出流量均存在显著波动,且波动规律具有一致性:在转子副共轭位置由出口腔向进口腔切换时,各项参数的波动达到峰值。
由表3可知,瞬时介质压力最小值(渐开线罗茨泵为2 062 Pa,圆弧罗茨泵为1 794 Pa)均远大于介质的饱和蒸气压400 Pa,说明介质未发生空化现象,验证了30 mm节圆半径和1.45形状系数的选择是合理的。
3.2 困油现象机理分析
由仿真结果可知,罗茨泵在输送高黏度液压油过程中出现了性能参数异常波动,这在本质上是由困油现象所导致的。当转子啮合形成近似的封闭腔室(啮合间隙)时,腔室容积随转子旋转发生周期性变化,造成腔室内的介质被强制压缩或膨胀,但介质又无法及时排出或补充,引发压力剧烈变化,进而导致输入功率、液压力及输出流量异常波动。其中,2种罗茨泵的困油特性差异源于转子啮合间隙的通道结构不同。
1)非全工作型轮廓转子(如渐开线转子):封闭腔室由过渡圆弧形成扇形圆环通道,该通道的流通面积小且阻力大,不利于腔室内介质在压缩/膨胀过程中及时排出或补充,导致压力脉动剧烈,最大压力较出口压力的增幅为113.3%。
2)全工作型轮廓转子(如圆弧转子):封闭腔室由工作轮廓形成凸-凹楔形通道,该通道的流通性优于扇形圆环通道,介质的排出与补充相对顺畅,压力脉动相对平缓,最大压力较出口压力的增幅为68.7%。
综上,罗茨泵在输送液压油等高黏度液体介质时,无论采用全工作型轮廓转子还是非全工作型轮廓转子,均存在显著的困油现象,且非全工作型轮廓的困油危害更严重。
4 带卸荷槽罗茨泵的仿真结果及分析
4.1 卸荷槽设计方案
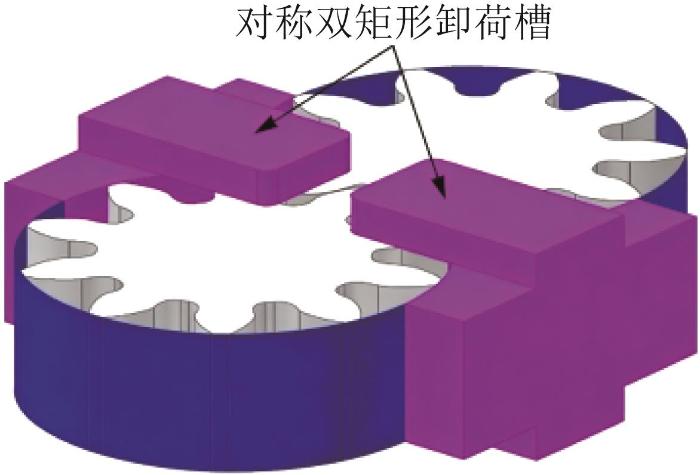
鉴于罗茨泵与齿轮泵在结构原理和困油机理上的一致性,本文借鉴齿轮泵的困油卸荷设计思路:通过在端盖内侧表面开设凹槽,来削弱因齿轮副重合度大于1(满足传动需求)所引发的困油腔容积周期性变化问题。图5所示为某款采用对称双矩形卸荷槽结构的齿轮泵几何模型。
图5
目前,齿轮泵困油卸荷槽的结构形式多样,但均针对重合度大于1、宽径比较小(主要为了减少轴向泄漏)的齿轮副结构。其中,重合度与宽径比越大,困油现象越显著;同时,宽径比越大,卸荷槽的卸荷能力相对越弱。
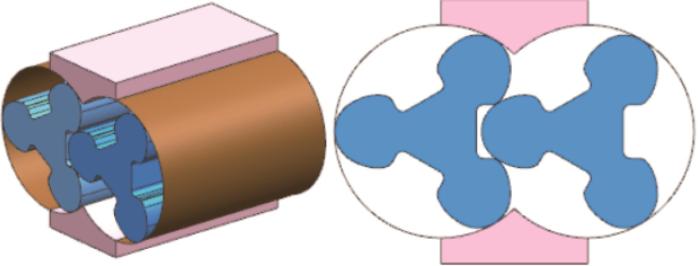
然而,罗茨泵的转子副结构具有重合度等于1、宽径比大的特点,导致适用于齿轮泵端盖的各类卸荷槽在罗茨泵上难以发挥有效作用。基于此,本文提出了一种在转子根部开设方形卸荷槽的解决方案,如图6所示(以渐开线罗茨泵为例)。选择方形结构主要是基于易加工的考量。该卸荷槽的核心作用为:在转子啮合形成封闭腔室的阶段,通过卸荷槽实现困油腔与进、出口通道的更多连通,以及时排出或补充腔室内的介质,从而有效抑制压力的剧烈波动。需要注意的是,由于需要避免转子的整体结构被破坏,与齿轮泵的端盖式卸荷槽相比,罗茨泵卸荷槽在结构创新(如形状、深度、数量)方面的优化空间相对有限。
图6
4.2 卸荷效果分析
图7
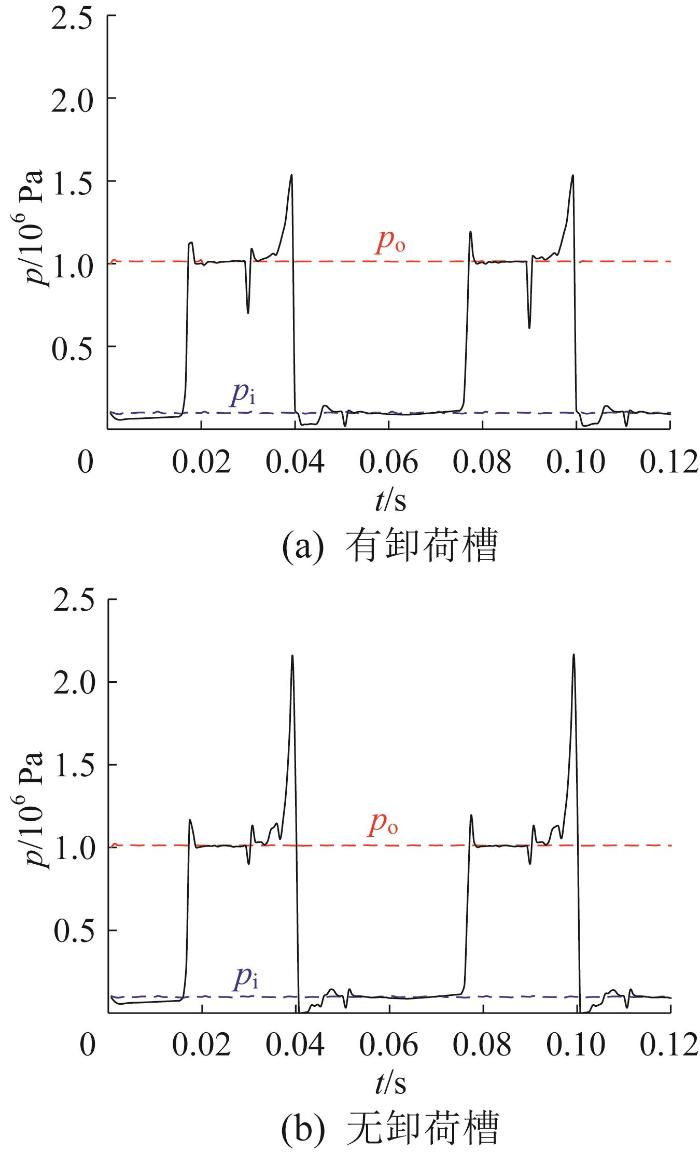
图7
有/无卸荷槽渐开线罗茨泵的介质压力曲线
Fig.7
Medium pressure curves of involute Roots pumps with/without relief grooves
表4 有/无卸荷槽渐开线罗茨泵的性能对比
Table 4
| 参数 | 无卸荷槽 | 有卸荷槽 | 变化率/% |
|---|---|---|---|
| p/Pa | 2 062~2.16×106 | 20 461~1.52×106 | -29.5① |
| 113.3 | 50.4 | -55.5 | |
| 98.0 | 79.8 | -18.6 | |
| Qₐᵥₑ/(m3/s) | 0.010 28 | 0.010 16 | -1.2 |
①介质压力波动范围的变化率。
由表4可知,在转子根部开设方形卸荷槽后,渐开线罗茨泵的压力脉动缓解显著:瞬时介质压力的波动范围缩小了29.5%,最大压力增幅从113.3%降至50.4%,改善率达55.5%,最小压力降幅从98.0% 降至79.8%,改善率达18.6%,有效抑制了压力脉动及其引发的输入功率、液压力及输出流量的显著波动。但是,因卸荷槽加大了啮合泄漏,罗茨泵的平均输出流量会出现1.2%的小幅下降。
5 结 论
1)罗茨泵困油现象的存在性与介质依赖性:罗茨泵在输送不同介质时的困油特性差异显著。在输送液压油等高黏度、低压缩性液体介质时,无论是采用全工作型轮廓转子还是采用非全工作型轮廓转子,罗茨泵均存在明显的困油现象,表现为介质压力、主动转子输入功率、液压力及输出流量波动剧烈。
2)转子轮廓对罗茨泵困油现象的影响:转子轮廓类型直接决定困油危害程度,非全工作型轮廓的困油危害更严重。渐开线转子啮合位置处的封闭腔室由过渡圆弧形成扇形圆环通道,流通面积小、阻力大,介质难以及时排出或补充,最大压力增幅达113.3%;圆弧转子啮合位置处形成凸-凹楔形通道,流通性相对较好,最大压力增幅仅为68.7%,压力脉动相对平缓。
3)卸荷槽对罗茨泵困油现象的缓解效果与副作用:在转子根部开设卸荷槽是抑制罗茨泵困油现象的有效手段,但卸荷槽会增加啮合泄漏,导致输出流量小幅下降。渐开线罗茨泵的仿真结果显示,在转子根部开设方形卸荷槽后,介质压力的波动范围缩小了29.5%,最大压力增幅从113.3%降至50.4%,改善率为55.5%,最小压力降幅从98.0%降至79.8%,改善率为18.6%,显著抑制了压力脉动;但泵的平均输出流量会出现1.2%的小幅下降。
4)罗茨泵困油研究的工程应用价值:通过参数化建模构造转子轮廓以及建立罗茨泵CFD仿真模型,明确了罗茨泵困油现象的产生机理(转子啮合形成封闭腔室,腔室容积随转子旋转呈周期性变化,腔室内的介质被强制压缩/膨胀且无法及时排出/补充),并提出了一种针对性的缓解方案,为罗茨泵的结构优化与工况适配提供了技术支撑。研究结果为罗茨泵向高黏度液体输送领域的拓展应用提供了重要的理论依据,可通过优选转子轮廓(如全工作型轮廓)或增设卸荷槽,来平衡罗茨泵的运行可靠性与流量特性。
参考文献
An improvement for experiment of manufacturing Roots pump rotors by conical milling cutter
[J].
Experimental investigation and numerical validation of a Roots pump's performance operating with gas-liquid mixtures
[J].
Roots multi-lobe vacuum pumps with external compression
[J].
罗茨泵极限真空度及其预抽时间预测模型研究
[J].
Research on prediction models for limiting vacuum degree and its pre-pumping time of Roots pump
[J].
罗茨真空机组预抽阶段的抽气特性比较研究
[J].
Comparative study on pumping characteristics of the Roots vacuum unit in start-up process
[J].
长短径比对不对称转子泵性能的影响
[J].
The effect of long-to-short radius ratio on the performance of asymmetric rotor pump
[J].
混合动力变速箱摆线转子泵动态特性分析
[J].
Analysis of dynamic characteristics of cycloidal rotor pump for hybrid transmission
[J].
齿轮泵侧隙卸荷的界定标准与验证
[J].
Demarcated standard and verification of backlash relief in external gear pumps
[J].
齿轮泵齿侧间隙与卸荷槽间距关系的定量分析
[J].
Quantitative analysis of relationship between backlash value and distance of two relief grooves in external gear pump
[J].
齿轮泵困油压力测试系统设计
[J].
Design of trapping pressure test system in gear pump
[J].
外啮合齿轮泵困油机理、模型及试验研究
[D].
Mechanism, modelling and experiment investigation of trapped oil in external gear pump
[D].
Modeling and simulation of pressures within the meshing teeth of gear pumps
[C]//
Design and fluid analysis of the microsegment gear tooth profile for pump operating at high speed and high pressure
[J].
外啮合齿轮泵困油压力的函数创建及其波动峰值控制研究
[J].
Function creation and fluctuation peak control of trapped oil pressure of external gear pump
[J].
齿轮泵基于困油力的高困油性能优化设计
[J].
Optimization design based on trapped-oil force for high trapped-oil performance of external gear pumps
[J].
外啮合齿轮泵/马达的一种高综合性能设计方法
[J].
Design method with high comprehensive performance for external gear-pumps and gear-motors
[J].
高速齿轮泵无气穴现象的综合补偿方法
[J].
A comprehensive compensation method for high-speed gear pumps without the cavitation phenomenon
[J].
外啮合齿轮泵困油面积和卸荷面积计 算式的建立
[J].
Established formulas for trapped-oil area and relief-load area of external spur-gear pump
[J].
齿轮泵最大困油压力解析式的建立与验证
[J].
Establishment and verification of analytic formula for maximum trapped-oil pressure in external gear pump
[J].
齿轮泵困油径向力的研究与量化分析
[J].
Research and quantitative analysis of the radial force impacted by trapped-oil pressure in external gear pumps
[J].
泵用齿轮副困油卸荷的H型侧隙结构研究
[J].
Research on H-shaped backlash structure on gear pairs for relief of trapped-oil in pumps
[J].
一种外啮合齿轮泵困油用卸荷槽对称设置的微连通结构
Micro-communication structure with symmetrically arranged unloading grooves for trapping oil of external gear pump
凸轮式氢气循环泵非定常流动与能量损失机理的研究
[D].
Research on unsteady flow and energy loss mechanisms in cam-type hydrogen circulation pump
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}