


随着超高压和特高压输电线路的大规模投入使用,绝缘拉棒作为更换绝缘子串的承力工具,对带电作业技术的发展和电力系统的安全稳定运行具有重要意义。然而,电压等级的提高以及绝缘子串长、荷载大等特性[1],使得对绝缘拉棒机械性能和绝缘性能的要求越来越高,导致绝缘拉棒的长度和质量明显增大。因此,大荷载绝缘拉棒的优化设计成为当前带电作业工器具研制领域的主要趋势,这既能降低生产成本,又能提高带电作业安全性。
目前,绝缘承力工器具的优化设计方法主要分为3类。第1类是基于人机工程学、新型连接技术以及有限元分析法等[2-4]对绝缘承力工器具进行结构优化设计。这类方法可以改善绝缘承力工器具的应力和电场分布特性,但在轻量化设计方面的提升空间有限,难以满足实际作业需求。第2类是采用新型的高性能纤维绝缘材料(如聚对苯撑苯并二噁唑纤维、芳纶纤维)替代环氧玻璃钢[5-6],这类方法可以有效减小绝缘承力工器具的整体质量,同时还能够提升其机械性能和电气性能。但该类方法在实际应用中存在一些问题:一是新型高性能纤维绝缘材料普遍存在价格昂贵、制造工艺复杂等问题;二是这类方法在带电作业领域的应用经验较少,特别是在突遇高湿度、降雨等恶劣作业环境下,难以保障作业安全。第3类是通过试错法、经验法和类比法等对绝缘承力工器具进行尺寸优化,该类方法可有效避免上述2类方法存在的问题,但这类方法仍停留在传统的人工经验驱动优化阶段,存在效率慢、精度低及难以满足多目标协同优化需求等局限性。因此,在现有尺寸优化方法的基础上,寻求绝缘承力工器具的新型智能化尺寸优化方法成为推动带电作业技术发展的关键。
多目标优化算法作为优化设计中的主流方法,已在工程领域得到了广泛应用。杜进桥等[7]通过有限元分析法和二代非支配排序遗传算法(non-dominated sorting genetic algorithm-Ⅱ, NSGA-Ⅱ)建立了盆式绝缘子屏蔽罩绝缘特性的优化模型,以屏蔽罩凹面和表面的最大电场强度为目标,有效改善了其电场分布。张维凯等[8]综合考虑结构变化对盆式绝缘子机械性能和绝缘性能的影响,构建了以应力和电场强度为目标的优化模型,在保证机械性能安全裕度的基础上改善了沿面电场分布情况。刘丰硕等[9]为提高中频变压器的绝缘特性,考虑变压器的功率密度,以绝缘结构的体积和电场强度为目标,通过C-MOEA/D(constrained multi-objective evolutionary algorithm based on decomposition,基于分解的约束多目标进化算法)进行优化设计,实现了变压器的全局优化。综上所述,多目标优化算法在绝缘设备的优化设计中已取得较多研究成果。然而,对于带电作业工器具的优化设计,不仅要考虑其电气性能和机械性能,还要兼顾其质量和形状,且随着结构尺寸的变化,这几者之间通常存在相互矛盾和相互冲突的关系。
多目标优化算法和计算模型的有效结合是提升优化精度的重要手段之一。经典的多目标优化算法NSGA-Ⅱ[10]和MOEA/D[11]难以处理复杂的高维多目标优化问题:NSGA-Ⅱ容易因参数的最佳配置、目标优化冲突以及精英解过度占据种群等问题而造成优化解的多样性和收敛性变差;MOEA/D将多个目标分解后所生成的子问题数量庞大,导致计算负担较大,算法性能显著衰退。2017年,Mirjalili等[12-13]在MVO(multi-verse optimization, 多元宇宙优化)算法的基础上开发了MOMVO(multi-objective MVO,多目标多元宇宙优化)算法,该算法具有较强的全局搜索能力,在处理复杂的高维多目标优化问题时具有显著优势。但是,在初始MOMVO算法的迭代过程中,由于虫洞存在概率线性单调递增、旅行距离率单调递减至零以及常规种群初始化等问题,其全局搜索和局部搜索相对不平衡[14],故需要对现存问题进行改进,以增强算法的适用性和鲁棒性。
基于此,本文以大荷载绝缘拉棒端头为研究对象,综合考虑其质量、应力、形变量以及电场强度与结构尺寸之间的相互影响,利用最优拉丁超立方抽样试验设计方法和径向基神经网络建立相应的多目标优化模型。随后,采用Sine-Tent-Cosine混沌映射策略改进MOMVO算法的种群初始化过程,利用正余弦算法改进其虫洞位置更新机制,并基于自适应参数更新策略改进正余弦算法和MOMVO算法中的关键参数,以实现多目标优化模型的求解。最后,通过仿真和试验来检验所提出的多目标优化方法的可行性和准确性。
1 大荷载绝缘拉棒计算模型的建立与分析
1.1 绝缘拉棒计算模型建立
本文选取的绝缘拉棒为某厂家研制的1 000 kV大荷载硬质绝缘拉棒,其整体由金属端头、高性能泡沫填充绝缘管以及中间连接件三部分组成。该绝缘拉棒分为3节,各节通过内锥连接的方式相互连接,端头与绝缘管通过螺纹连接。利用SolidWorks软件构建整根绝缘拉棒的三维模型。限于篇幅,仅展示绝缘拉棒第1节的模型,如图1所示。
图1
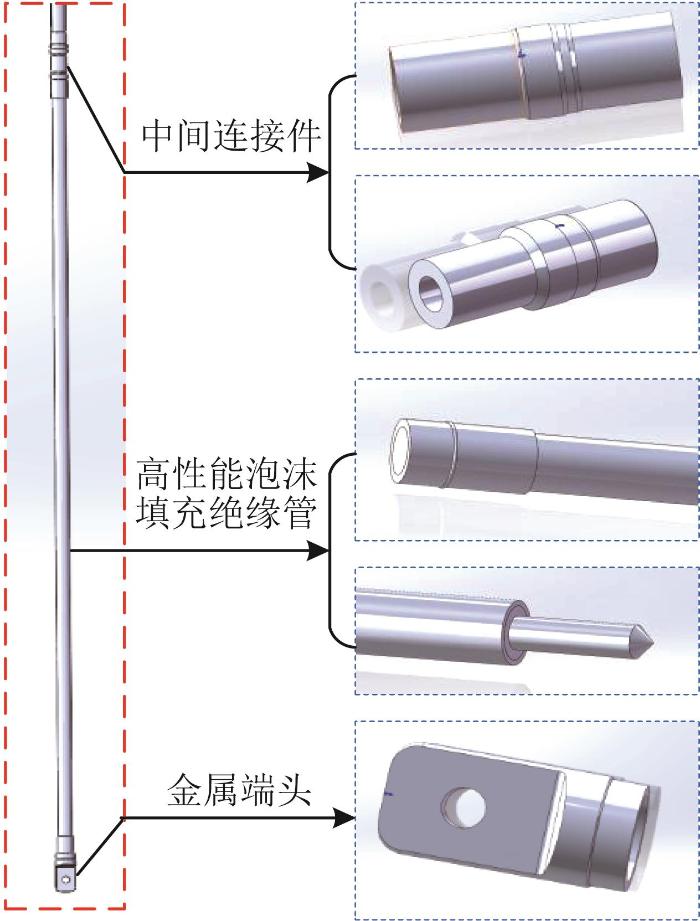
图1
绝缘拉棒三维模型(第1节)
Fig.1
Three-dimensional model of insulating pull rod (the first section)
表1 绝缘拉棒各部件材料的相关参数
Table 1
| 材料 | 相对介电常数 | 密度/ (kg/m3) | 杨氏模量/GPa | 泊松比 |
|---|---|---|---|---|
| 40Cr | 3 | 7 850 | 210 | 0.26 |
| 环氧树脂玻璃钢 | 5 | 1 780 | 35 | 0.30 |
| 泡沫管芯 | 3 | 45 | 0.015 | 0.30 |
| 环氧树脂 | 4 | 1 200 | 1 | 0.38 |
| 60Si2Mn | 1 | 7 850 | 205 | 0.30 |
1.2 绝缘拉棒机械性能仿真分析
图2
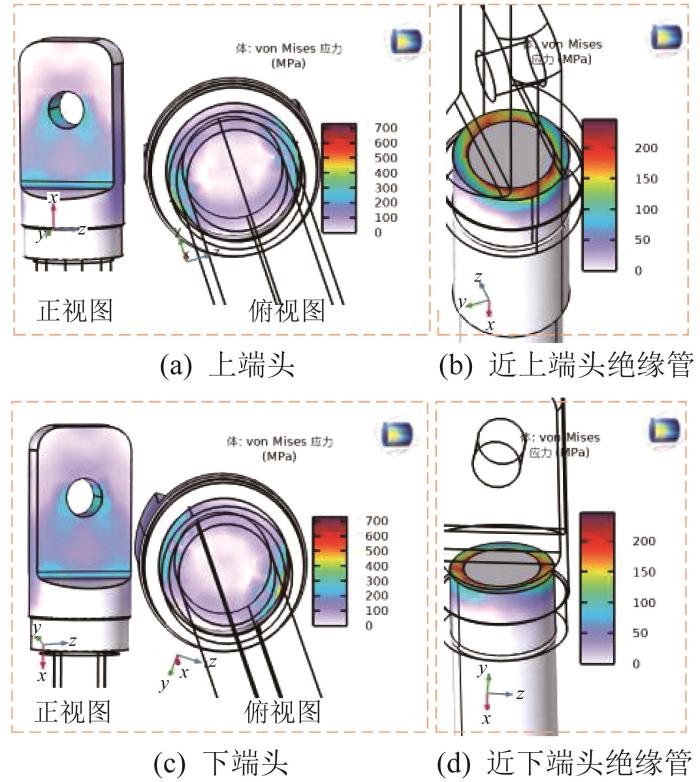
图2
绝缘拉棒关键部件的应力分布云图
Fig.2
Cloud map of stress distribution of key components in insulating pull rod
图3
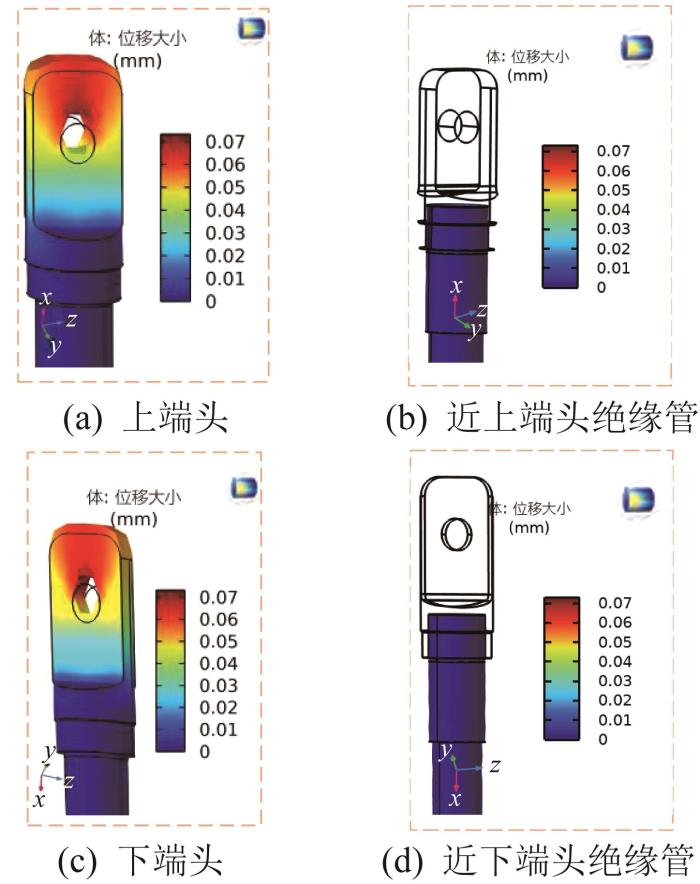
图3
绝缘拉棒关键部件的形变量分布云图
Fig.3
Cloud map of deformation distribution of key components in insulating pull rod
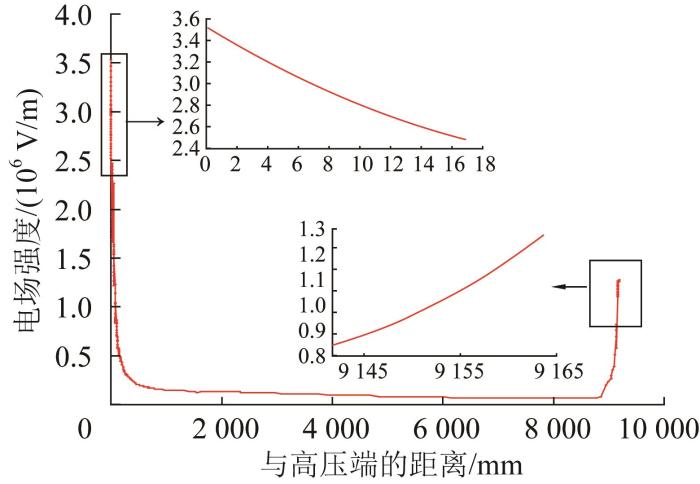
1.3 绝缘拉棒电场强度仿真分析
图4
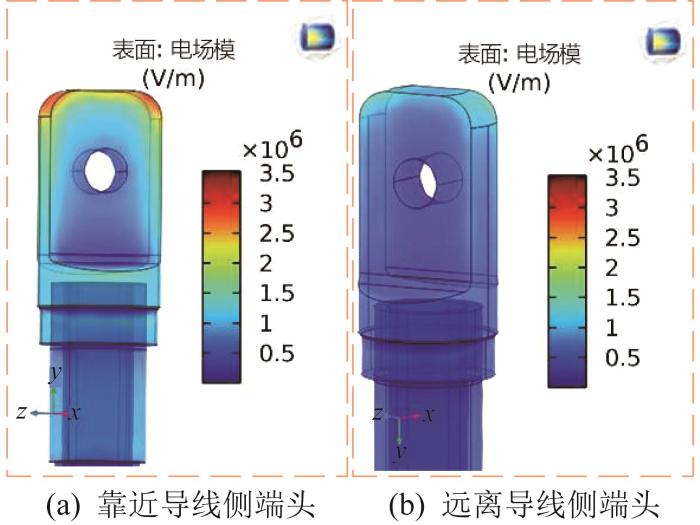
图4
绝缘拉棒端头表面电场分布云图
Fig.4
Cloud map of electric field distribution on the surface of insulating pull rod end
图5
综上,绝缘拉棒端头的最大应力接近40Cr的最大屈服强度,安全裕度较小。综合考虑端头结构对绝缘拉棒电气性能和形变量的影响,在对绝缘拉棒端头进行轻量化设计过程中,需兼顾机械性能和绝缘性能。
2 大荷载绝缘拉棒端头多目标优化设计
2.1 改进的MOMVO算法
2.1.1 算法描述
MOMVO算法为Mirjalili等[12]结合多目标优化问题与宇宙演化过程所提出的一种群体智能优化算法,通过模拟宇宙间的引力与排斥交互机制来维持种群多样性,具有较强的全局搜索能力。然而,MOMVO算法的局部搜索能力较差,在处理复杂的高维多目标优化问题时计算速度缓慢,易陷入局部最优。鉴于此,为提升MOMVO算法的性能,本文主要针对其种群初始化、探索和开发阶段进行改进。
2.1.2 基于Sine-Tent-Cosine混沌映射策略的种群初始化
MOMVO算法的种群初始化过程极易出现分布不均匀现象,导致初始种群在搜索空间的某些区域过度集中,从而造成算法收敛速度缓慢、易陷入局部最优。
为此,本文引入Sine-Tent-Cosine混沌映射策略[19]。将3种低维混沌复合,一方面可以克服低维混沌行为有限、序列分布不均匀等不足;另一方面能够避免高维混沌映射复杂程度高、难以实现的缺陷。Sine-Tent-Cosine混沌映射的具体公式如下:
式中:x
当设定控制参数r=0.9时,所生成的2 000个混沌序列数值的分布如图6所示。
图6
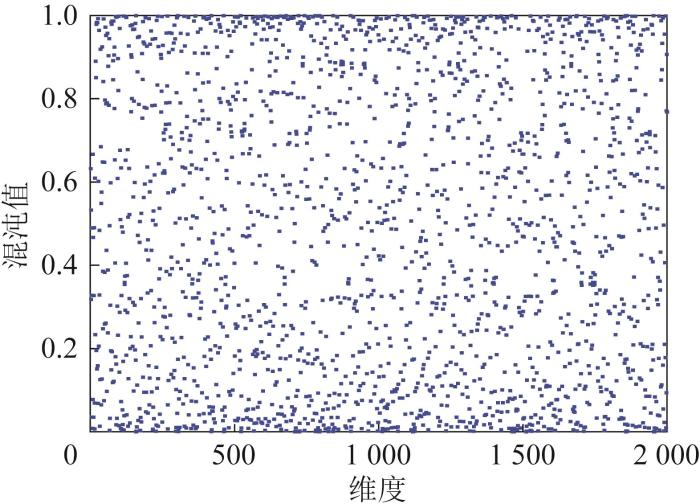
图6
Sine-Tent-Cosine混沌映射序列数值分布图
Fig.6
Distribution diagram of Sine-Tent-Cosine chaotic mapping sequence values
2.1.3 融合正余弦算法的虫洞位置更新机制
正余弦算法是Mirjalili[20]在2016年受模拟数学中正余弦函数周期特性启发所提出的元启发式算法。为增强MOMVO算法的全局和局部搜索能力,以提升收敛效率和增加解的多样性,利用正余弦算法的位置更新机制改进MOMVO算法的虫洞位置更新机制,并去除传统虫洞机制中的旅行距离率TDR,降低算法的复杂度。新的虫洞位置更新公式如
当r2<WEP时:
当r2≥WEP时:
式中:xij 为第i个宇宙中的第j个物体;pjt 为全局最优宇宙中的第j个物体;Xjt 为当前最优宇宙中的第j个物体;t为当前迭代次数;WEP为虫洞存在概率;r2、r3为互不影响的随机数,取值范围在[0, 1]内;k1为确定下一个位置区域(或移动方向)的振幅转换因子;k2为朝最优解向外移动的距离,取值范围为[0, 2π];k3为最优解的随机权重,取值范围为[0, 2]。
2.1.4 自适应参数更新策略
式中:δ为幅值控制参数,取δ=1;β1为前半段衰减速率调节参数,取β1=3;β2为后半段衰减速率调节参数,取β2=0.5;T为最大迭代次数。
2)改进虫洞存在概率WEP。传统MOMVO算法中的虫洞存在概率WEP是决定虫洞机制启动的重要参数,WEP通常为线性增长。为提高探索阶段的个体交互更新能力和开发阶段的精细搜索能力,引入自回归更新策略和动态调整参数λ,用于改进WEP,具体如下:
其中:
式中:WEP
2.1.5 改进MOMVO算法的流程
本文所提出的改进MOMVO算法的基本流程如图7所示,具体步骤如下:
图7
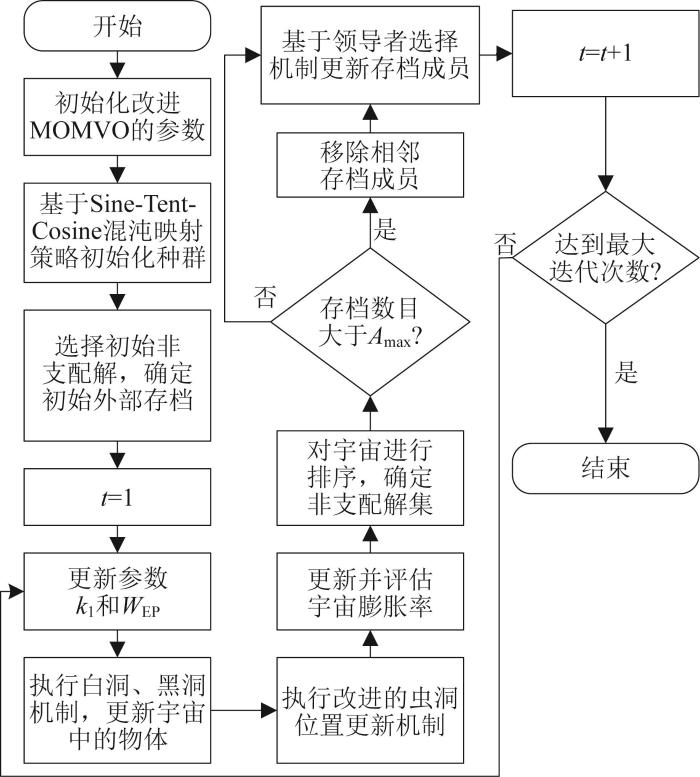
步骤1:设置改进MOMVO算法的参数,包括变量数目dim、变量上下界ub和lb、目标数量No、种群数量ps、储存最优解的最大数量Amax及最大迭代次数T等。
步骤2:基于Sine-Tent-Cosine混沌映射策略得到的混沌序列,利用
步骤3:计算初始宇宙膨胀率,根据膨胀率进行排序,选择初始非支配解,并加入外部存档。
步骤4:开始迭代,根据
式中:N
步骤5:根据改进后的虫洞位置更新策略,利用
步骤6:更新并评估所有宇宙的膨胀率,对宇宙排序,确定非支配解集,并保存到外部存档中。
步骤7:判断外部存档数量是否大于储存最优解的最大数量,若为小于,则根据
式中:Ph 为选择第h个解的概率,
步骤8:迭代次数加1,并判断是否达到最大迭代次数,若达到,则终止算法并输出Pareto前沿,即所有非支配解的集合;否则,返回步骤4。
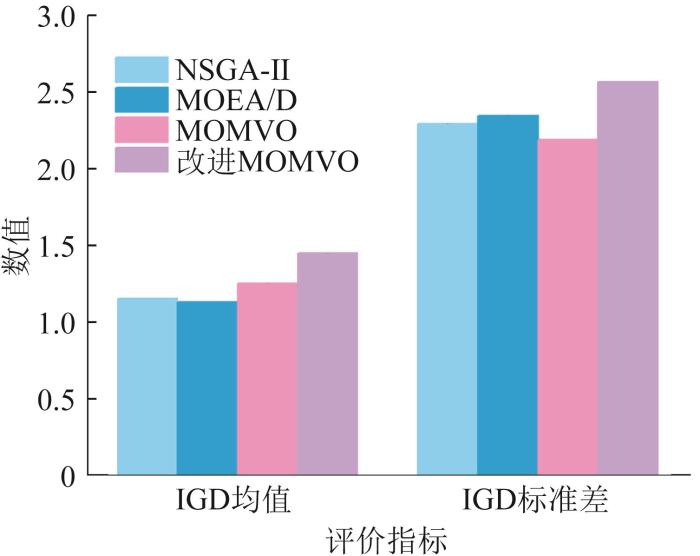
2.2 算法测试
本文选取基准测试函数ZDT1、DTLZ2[23]来验证改进MOMVO算法的性能。重复运行NSGA-II、MOEA/D、MOMVO算法和改进MOMVO算法各30次并进行对比分析。
图8
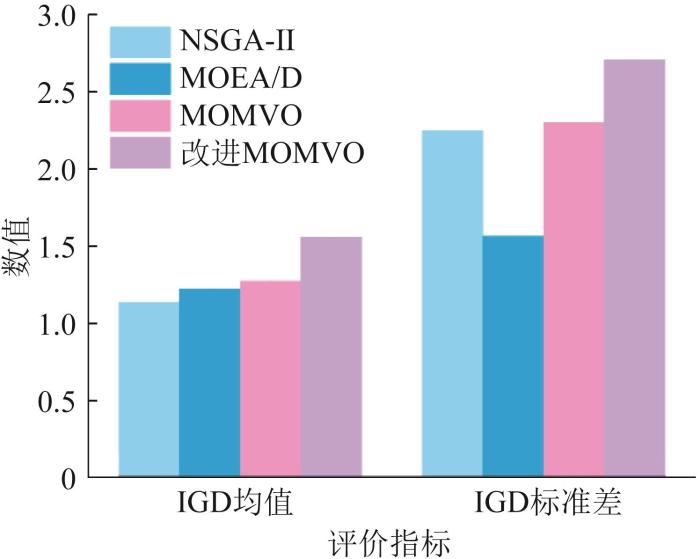
图9
2.3 目标函数及优化变量选取
为提高大荷载绝缘拉棒的安全性和便捷性,本文选取绝缘拉棒端头的最大应力σ、最大形变量Δl、最大电场强度Em和质量M作为优化目标。
图10
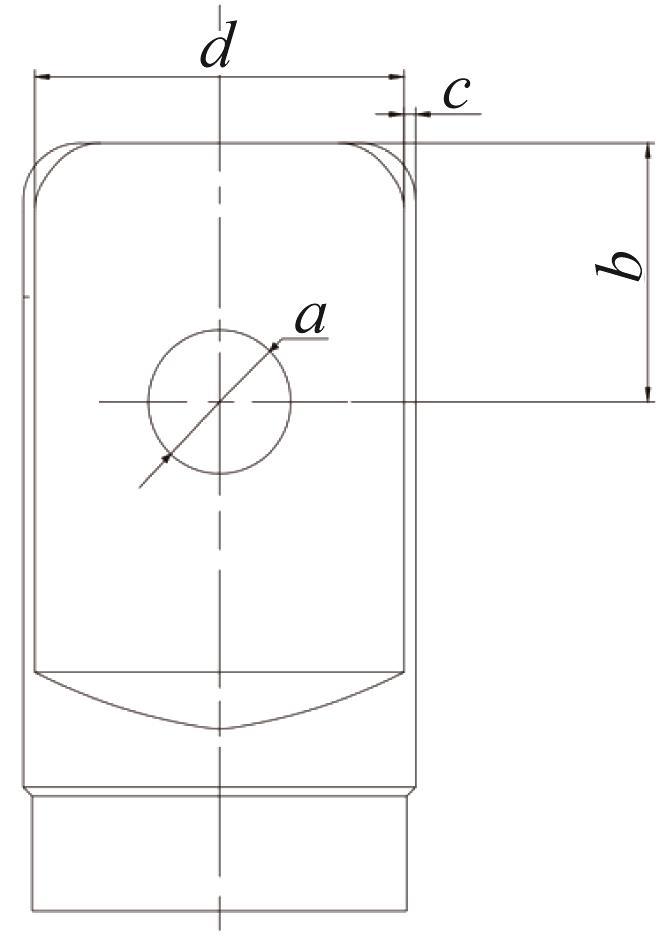
表2 绝缘拉棒端头优化变量的取值范围 (mm)
Table 2
| 优化变量 | 初始值 | 最小值 | 最大值 |
|---|---|---|---|
| 端头销控直径a | 25 | 20 | 50 |
| 端头销控位置b | 45 | 40 | 55 |
| 端头厚度c | 25 | 20 | 45 |
| 端头宽度d | 69 | 65 | 88 |
2.4 试验设计
选择合适的试验设计方法是实现多目标优化的关键环节之一。目前,常用的试验设计方法包括全因素试验设计、D最优试验设计以及拉丁超立方抽样试验设计等。其中,拉丁超立方抽样是最常用的基础抽样方法,但其样本分布可能存在一定偏差。
相较于传统的拉丁超立方抽样,最优拉丁超立方抽样[26]利用最小化协方差矩阵优化准则,确保了样本点在多维空间中的分布更加均匀,减少了抽样偏差,同时尽可能地填充参数空间,使得样本点分布更加合理。综合考虑数据抽取效率以及试验设计的可靠性,本文选取最优拉丁超立方抽样试验设计方法。
基于最优拉丁超立方抽样试验设计方法,在样本空间内抽取100个样本点,并通过SolidWorks软件建模以及COMSOL软件有限元仿真获取100组试验数据,部分试验结果如表3所示。
表3 绝缘拉棒端头优化试验设计方案及结果
Table 3
| 序号 | 端头销控 直径/mm | 端头销控 位置/mm | 端头厚度/mm | 端头宽度/mm | 最大应力/MPa | 最大形变量/mm | 最大电场强度/(V/m) | 质量/kg |
|---|---|---|---|---|---|---|---|---|
| 1 | 25.328 4 | 45.744 1 | 22.482 9 | 74.842 2 | 560.412 6 | 0.074 97 | 3.262 8×106 | 1.914 1 |
| 2 | 48.409 8 | 50.433 9 | 24.995 9 | 78.322 2 | 641.152 7 | 0.103 39 | 3.072 5×106 | 1.922 1 |
| 3 | 42.771 6 | 51.656 8 | 21.557 3 | 74.330 9 | 688.298 8 | 0.100 51 | 3.469 2×106 | 1.689 0 |
| 4 | 30.338 3 | 54.915 4 | 24.331 6 | 68.048 9 | 828.042 9 | 0.072 24 | 4.097 1×106 | 1.702 3 |
| 5 | 47.752 1 | 48.462 0 | 38.969 2 | 69.780 8 | 949.587 7 | 0.109 39 | 3.123 6×106 | 2.055 4 |
| 6 | 20.976 0 | 45.323 4 | 35.807 3 | 74.946 5 | 445.974 3 | 0.047 17 | 2.991 2×106 | 2.622 0 |
| 7 | 37.155 1 | 43.797 7 | 33.225 2 | 87.450 6 | 404.636 6 | 0.060 08 | 2.903 6×106 | 2.915 7 |
| 8 | 35.612 2 | 46.921 3 | 39.328 7 | 76.167 5 | 409.427 9 | 0.052 30 | 2.769 8×106 | 2.651 8 |
| 9 | 33.183 2 | 40.702 1 | 20.802 2 | 69.598 1 | 851.693 2 | 0.107 32 | 3.373 5×106 | 1.578 9 |
| 10 | 21.563 1 | 54.180 5 | 39.683 4 | 87.257 6 | 314.102 7 | 0.035 60 | 2.806 8×106 | 3.475 0 |
| … | … | … | … | … | … | … | … | … |
| 100 | 47.005 3 | 40.103 6 | 33.554 2 | 80.242 2 | 402.401 3 | 0.096 27 | 2.850 6×106 | 2.404 2 |
2.5 代理模型建立
2.5.1 径向基神经网络
径向基神经网络是一种以径向基函数作为隐层激活函数的3层反馈网络,具有高度非线性映射能力、泛化能力及结构相对简单等优点,被广泛应用于工程优化。
考虑到本文优化目标与优化变量之间的关系较为复杂,利用径向基神经网络对试验数据进行拟合[27],建立优化目标与优化变量之间的数学模型。径向基神经网络的核心函数如下:
式中:
输出层的加权求和计算公式如下:
式中:N1为隐层节点数,δm 为第m个隐层节点到输出层的权重系数。
2.5.2 代理模型
本文采用MATLAB软件工具箱中newrb函数构建和训练径向基神经网络代理模型。经多次试验,设置扩展常数为10,计算目标误差为0,最大神经元数量为80。
图11
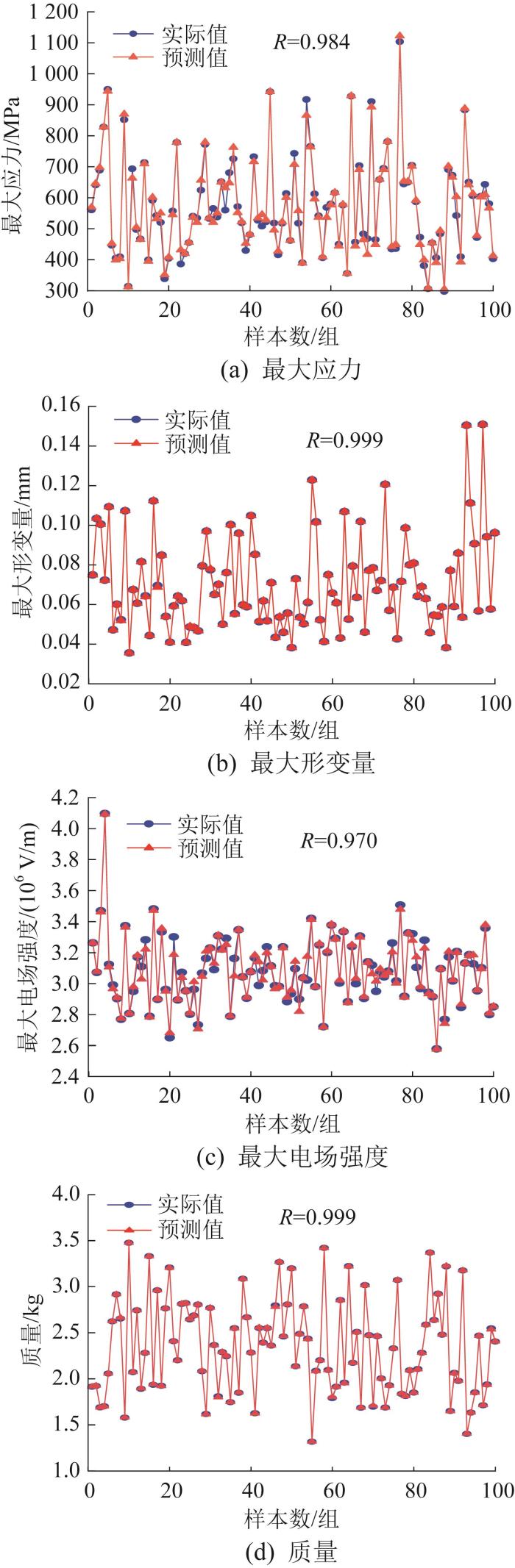
图11
绝缘拉棒端头各优化目标的拟合曲线
Fig.11
Fitting curves of each optimization target of insulating pull rod end
2.6 优化结果与分析
基于MATLAB软件编写改进MOMVO算法程序,设置优化目标数量为4,种群数量为200,最大迭代次数为300。最终得到的绝缘拉棒端头多目标优化的Pareto前沿如图12所示。
图12
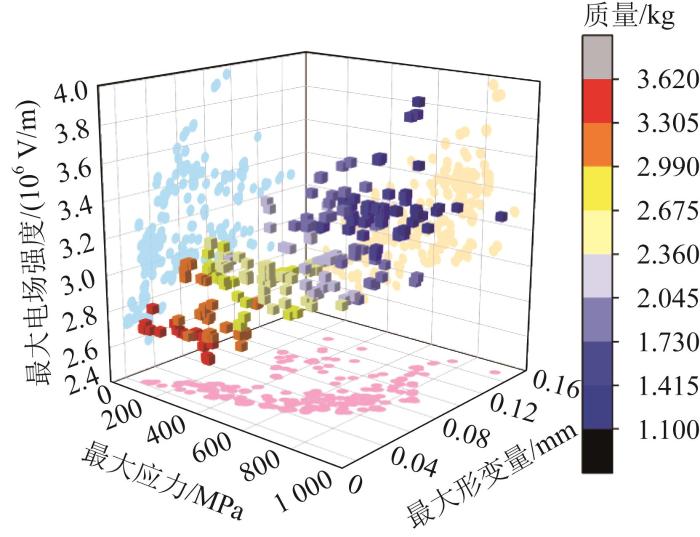
图12
绝缘拉棒端头多目标优化的Pareto前沿
Fig.12
Pareto frontier of multi-objective optimization for insulating pull rod end
以优化前绝缘拉棒的仿真结果作为约束条件,从Pareto前沿中筛选可行Pareto前沿,共包含31组可行解。利用加权目标函数的方法,对可行解集进行归一化处理,并根据
式中:
图13
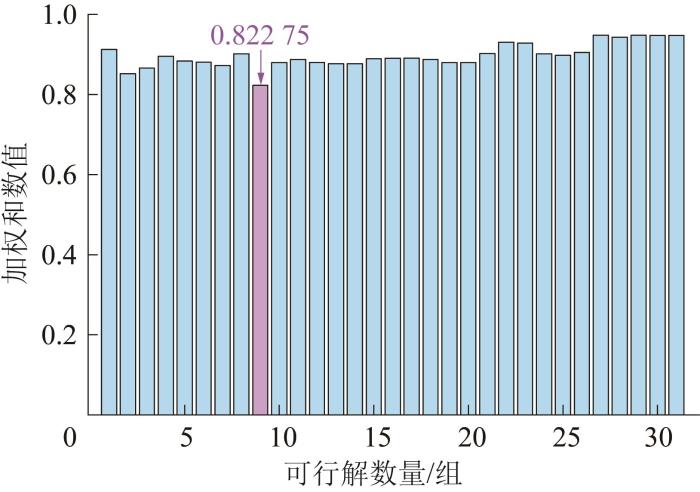
图13
绝缘拉棒端头多目标优化可行解的加权和数值
Fig.13
Weighted sum value of feasible solutions of multi-objective optimization for insulating pull rod end
表4 优化后绝缘拉棒端头的尺寸参数 (mm)
Table 4
| 参数 | 数值 |
|---|---|
| 端头销控直径 | 27.311 |
| 端头销控位置 | 52.855 |
| 端头厚度 | 24.373 |
| 端头宽度 | 66.195 |
3 仿真试验与性能试验
3.1 仿真试验
为验证上述绝缘拉棒端头优化方案的可行性与准确性,对优化后的绝缘拉棒开展仿真试验。优化后绝缘拉棒端头的性能参数和质量的预测值与仿真值如表5所示。经对比分析,优化后端头的最大应力、最大形变量、最大电场强度以及质量的预测值与仿真值的相对误差分别为0.67%、1.47%、0.90%、1.81%,均低于5%,验证了优化方案的可行性与准确性。
表5 优化后绝缘拉棒端头的性能参数与质量
Table 5
| 对比项 | 最大应力/MPa | 最大形变量/mm | 最大电场强度/(V/m) | 质量/kg |
|---|---|---|---|---|
| 预测值 | 593.235 | 0.067 | 3.306×106 | 1.630 |
| 仿真值 | 589.302 | 0.068 | 3.336×106 | 1.660 |
优化后绝缘拉棒端头的应力、形变量、电场强度仿真结果如图14所示。与优化前相比,端头的最大应力降低了17.03%,最大形变量降低了6.85%,最大电场强度降低了5.58%,质量减小了10.66%,符合预期设计目标。
图14
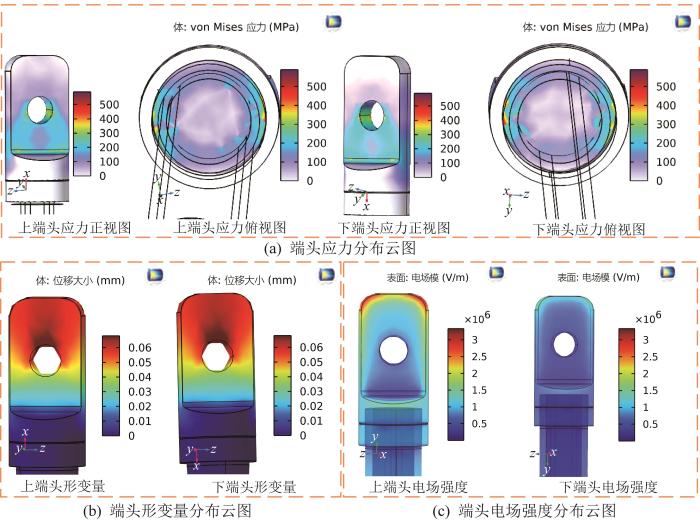
图14
优化后绝缘拉棒端头的仿真结果
Fig.14
Simulation results of optimized insulating pull rod end
3.2 性能试验
图15
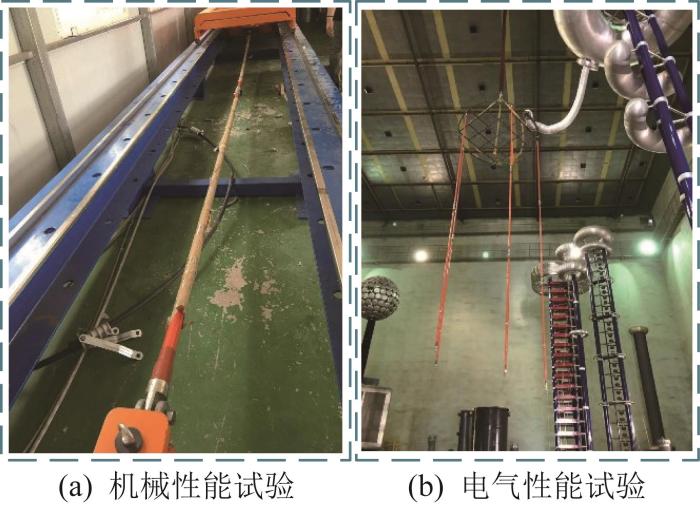
在机械性能试验中,分别开展静、动荷载试验,在施加150 kN和250 kN的荷载后,绝缘拉棒未出现永久变形和损伤情况。在电气性能试验中,分别开展工频耐压试验和操作冲击耐压试验。在试验过程中,绝缘拉棒未出现闪络和击穿现象,且未发现放电痕迹。结果表明,所得的绝缘拉棒端头多目标优化方案满足带电作业工具设计导则,优化后的绝缘拉棒可应用于特高压带电作业场景。
4 结 论
为减小大荷载绝缘拉棒的质量并提高其机械性能安全裕度,同时保证良好的绝缘性能,基于改进MOMVO算法提出了一种绝缘拉棒端头多目标优化方法,所做工作及相关结论如下。
1)将Sine-Tent-Cosine混沌映射策略、正余弦算法和自适应参数更新策略融合到MOMVO算法中,提出了一种改进的MOMVO算法。测试结果表明,改进MOMVO算法的性能显著优于NSGA-II、MOEA/D和MOMVO算法。
2)基于最优拉丁超立方抽样试验设计方法和径向基神经网络建立了绝缘拉棒端头最大应力、最大形变量、最大电场强度和质量的代理模型,各模型均具有较高的拟合度。
3)基于改进MOMVO算法有效地实现了绝缘拉棒端头机械性能、电气性能与质量的协同优化,在以减小端头质量作为核心目标的前提下实现了绝缘拉棒机械性能与电气性能的改善。

本文链接:https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.05.110
参考文献
超/特高压交直流输电线路带电作业
[J].
Live working on EHV/UHV transmission lines
[J].
基于人机工程学的配网新型绝缘杆作业能力提升及工器具优化研究
[J].
Study of improvement of distribution network's operational capability and instrument based on ergonomics
[J].
特高压带电作业中高强防雨绝缘拉棒设计
[J].
Design of high strength waterproof insulating pull rod for UHV live working
[J].
Study on electric field distribution and metal joints optimization of insulated rods for UHV live working
[C]//
特高压带电作业用软质绝缘拉棒的研制
[J].
Flexible insulating rod for live line working with ultra-high voltage
[J].
超高压及特高压输电线路耐张塔型带电作业方法研究
[D].
Research on live working method of tension tower type for EHV and UHV transmission lines
[D].
特高压交流盆式绝缘子电场分布计算及屏蔽罩结构优化
[J].
Electric field distribution calculation and shielding electrode structure optimization of UHVAC basin-type insulator
[J].
基于NSGA-Ⅱ算法的GIS隔离开关盆式绝缘子电场分布和机械性能综合优化
[J].
Integrated optimization of electrical field distribution and mechanical performance of basin-type insulator in GIS disconnector based on NSGA-Ⅱ
[J].
基于C-MOEA/D约束多目标优化算法的中频变压器绝缘结构全局优化设计方法
[J].
Global optimal design method for insulation structure of medium frequency transformer based on constrained multiobjective optimization algorithm C-MOEA/D
[J].
A fast and elitist multiobjective genetic algorithm: NSGA-II
[J].
MOEA/D: a multiobjective evolutionary algorithm based on decomposition
[J].
Multi-verse optimizer: a nature-inspired algorithm for global optimization
[J].
Optimization of problems with multiple objectives using the multi-verse optimization algorithm
[J].
MVO-based 2-D path planning scheme for providing quality of service in UAV environment
[J].
环氧树脂玻璃钢的动静态拉伸力学特性
[J].
Dynamic and static tensile mechanical properties of glass fiber reinforced plastics
[J].
基于COMSOL热流固耦合的金属氧化物避雷器密封结构优化
[J].
Optimization of sealing structure of metal oxide arrester based on COMSOL thermal-fluid-solid coupling
[J].
Three-dimensional FEM electrical field calculation for FRP hot stick during EHV live-line work
[J].
Cosine-transform-based chaotic system for image encryption
[J].
SCA: a sine cosine algorithm for solving optimization problems
[J].
A comprehensive survey on the sine-cosine optimization algorithm
[J].
基于改进正余弦算法的抱杆结构优化
[J].
Structure optimization of holding poles based on the improved sine cosine algorithm
[J].
多策略改进的多目标粒子群优化算法
[J].
Improved multi-objective particle swarm optimization algorithm based on multiple strategies
[J].
一种多策略协同的多目标萤火虫算法
[J].
Multi-objective firefly algorithm based on multiply cooperative strategies
[J].
动态多目标优化研究综述
[J].
A survey on dynamic multi-objective optimization
[J].DOI:10.11897/SP.J.1016.2020.01246 [本文引用: 1]
On optimal Latin hypercube design for yield analysis of analog circuits
[C]//
基于径向基函数神经网络和NSGA-Ⅱ的气保焊工艺多目标优化
[J].
Multi-objective optimization of gas metal arc welding process parameters based on radial based function neural network and NSGA-Ⅱ
[J].
大型船舶推进轴系校中-振动性能综合优化研究
[J].
Research on comprehensive optimization of alignment-vibration performance of large ship propulsion shafting
[J].
基于多目标灰狼优化算法与RBF神经网络的真空灭弧室触头结构优化设计
[J].
Structural optimization design of vacuum interrupter contact based on multi-objective grey wolf optimization algorithm and RBF neural network
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}