


早在1968年,英国人Prowse发明了金刚石绳锯。绳锯作为一种柔性的超硬材料切割设备,因具有切口精确规整、工作条件适应性强以及对环境破坏小等优势,已在矿山石材开采、异形板材加工和钢筋混凝土构筑物拆除等多个领域得到了广泛应用[7-8]。通过分析现有绳锯切割设备的工作原理并结合现场实际应用情况,发现在利用这些设备进行无砟轨道结构切割作业时,需先用铁路专用运输小车将设备运输至施工区域,再铺设导轨和钻设水平导绳孔;在切割过程中,设备通过沿固定导轨走行来张紧串珠绳,以实现对轨道结构的切割,当走行至导轨末端时,需继续向前铺设导轨,以逐段完成切割工作。当需要转换切割方向(水平方向→竖直方向)时,则又需投入大量人力来配合完成设备转移、方向调整、导轨重新铺设、竖向导绳孔钻设等工序,相关操作困难且费时,导致施工效率低下。由此可见,现有绳锯切割设备并不适用于高铁运维的“空间受限”和“天窗点”短时间作业环境。
为此,本文在分析现有修复技术和绳锯切割设备功能的基础上,结合高铁运维作业特点,对现有设备进行优化升级,研制适用于运营高铁无砟轨道的新型绳锯切割设备,旨在为后续类似工程的实施提供便捷高效的解离设备,以进一步完善运营高铁无砟轨道线路变形修复技术。
1 新型绳锯切割设备的功能需求及设计方案
1.1 功能需求分析
图1
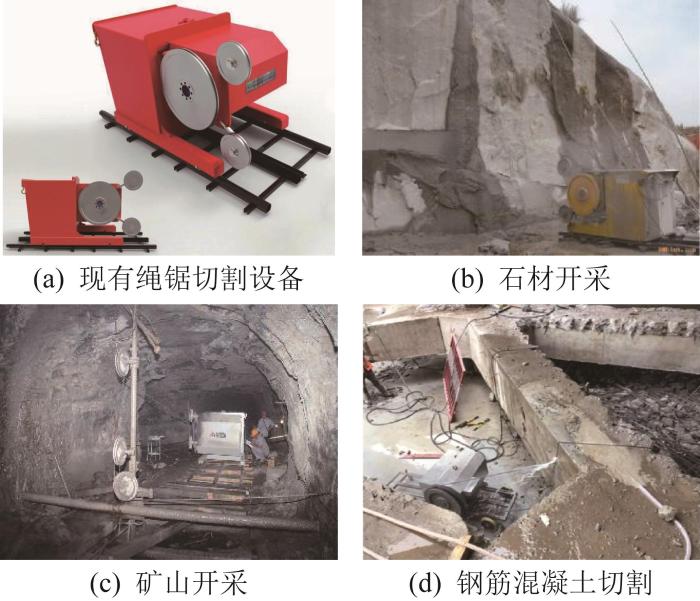
图1
现有绳锯切割设备及其工程应用
Fig.1
Existing rope saw cutting equipment and its engineering application
图2
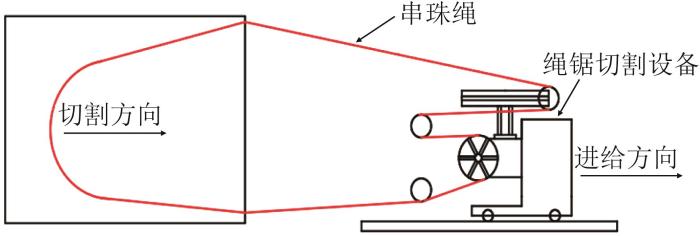
图2
现有绳锯切割设备作业原理
Fig.2
Operating principle of existing rope saw cutting equipment
鉴于高铁运维的“空间受限”和“天窗点”(00:00—04:00)短时间作业特点,主要应用场景为露天矿山的整体式绳锯切割设备因无法自主移动且只能沿单一方向分段切割,在使用过程中存在操作困难、效率低下的问题。因此,亟须研制一款适用于运营高铁无砟轨道线路变形修复的新型绳锯切割设备,其功能需求如下。
1)轻质模块化。高铁运维受到通信电缆、供电设备和隧道有限空间的限制,考虑到安全因素,严禁未经审批的大型设备上道使用。基于此,新型绳锯切割设备应轻质化,以便人力搬运;同时,为了能最大限度地利用“天窗点”作业时间,绳锯切割设备应能快速组装拆卸,组装拆卸时间宜控制在10 min以内。
2)自主移动。高铁线路变形区段沿线路分布不一,通常施工区域距离通道门数百米至几千米。为满足“天窗点”作业要求,新型绳锯切割设备应能快速到达施工区域,且每切割完成一处工作面后能立刻转移至新工作面,因此需具备沿轨道自主移动的能力。
3)不分段水平切割。高铁无砟轨道为带状构筑物,线路变形区段长度通常为几十至几百米,为尽量减少水平导绳孔的钻设数量以及保证切割缝的精确规整,新型绳锯切割设备应能对无砟轨道进行连续的不分段水平切割。
4)双向转换切割。当高铁线路的上拱量大于绳锯切割设备的切割缝(10~12 mm)时,在施工过程中需沿水平和竖直方向各切割2次,以形成通缝,随后通过取出相应厚度的轨道板芯来实现高程调整。因此,新型绳锯切割设备应能实现沿水平和竖直方向的双向切割,且切割方向的转换方便快捷。
1.2 总体方案设计
为满足高铁运维工程对绳锯切割设备提出的功能需求,研制了一款新型绳锯切割设备,其总体设计方案如图3所示。
图3
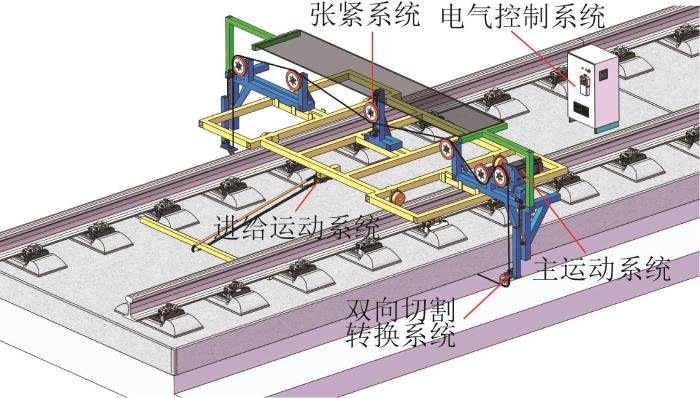
图3
新型绳锯切割设备总体设计方案
Fig.3
Overall design scheme of new rope saw cutting equipment
新型绳锯切割设备采用模块化设计理念,主要包括框架式装载平台、导向架和安全防护罩三大模块单元以及电气控制系统、主运动系统、进给运动系统、张紧系统、双向切割转换系统等五大功能系统[15-18]。为实现轻质化设计,三大模块单元均采用10 mm×20 mm×1.5 mm的Q235矩形空心型钢。框架式装载平台长2.5 m,宽1.5 m,底部焊接4个滑轮,滑轮间距与标准轨距1 435 mm一致,在施工时装载平台可沿钢轨移动并兼顾运输功能。两侧导向架通过螺杆与装载平台固定连接并可横向调整,以适应不同型式轨道结构的宽度。为保证施工安全,防止卡绳、断绳等影响人身安全,设置了安全防护罩,防护罩通过螺杆与导向架固定连接。
2 新型绳锯切割设备功能系统设计
2.1 电气控制系统设计
为避免作业过程中绳锯切割设备的振动对电气控制系统产生影响,将其与设备主体分开放置。电气控制系统主要包括PLC(programmable logic controller,可编程逻辑控制器)、变频器、步进电机驱动器、变频电机、步进电机(主运动电机、进给电机、张紧电机、摆动电机和提绳电机)和遥控器等,其结构组成如图4所示。
图4
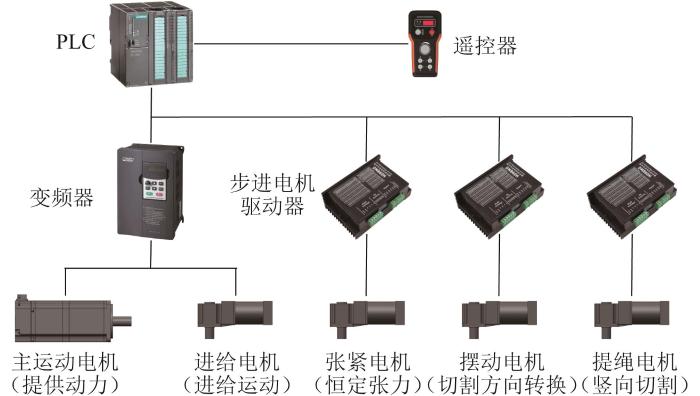
电气控制系统通过操控变频电机和步进电机来实现对绳锯切割设备的控制。其中:主运动电机和进给电机通过PLC控制变频器来实现调速;张紧电机、摆动电机和提绳电机通过PLC控制步进电机驱动器来实现恒定张力、切割方向转换和竖向切割。所有控制指令均由遥控器发出,经通信电缆实现各类信号的传输。
2.2 主运动系统设计
主运动系统是绳锯切割设备的核心功能系统,用于为切割作业提供动力。主运动系统的主要零部件包括主运动电机、主动轮和联轴器等,其结构组成如图5所示。
图5
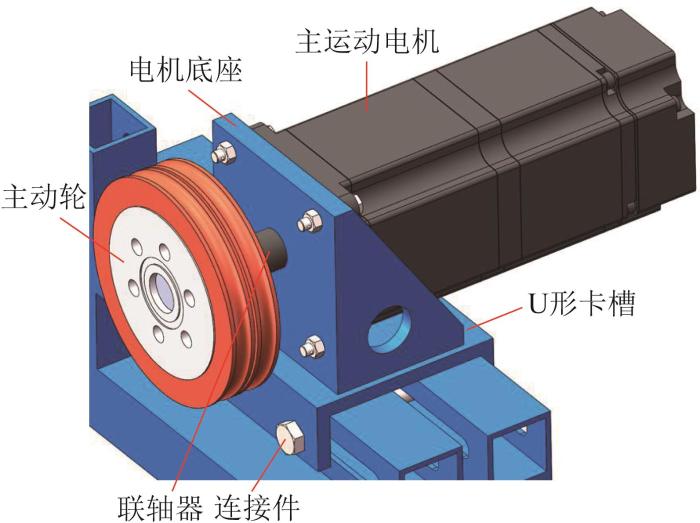
主运动系统通过电机底座、U形卡槽和连接件固定在导向架上。当主运动电机启动后,由联轴器驱动主动轮高速旋转,带动金刚石串珠绳进行快速切削运动,进而实现对无砟轨道结构的切割。在切割作业过程中,主运动电机需要克服串珠绳作切削运动时产生的阻力矩以及主动轮和导向轮旋转时产生的惯性阻力矩。考虑到振动、冲击等因素的影响,取安全系数为1.5,通过计算可得主运动电机的总阻力矩为24.5 N·m。根据调研分析,选择上海某公司生产的TYVZ-2200-112M-4型高速水冷电机,其额定扭矩为35.3 N·m,额定转速为1 500 r/min,额定功率为18.5 kW,供电电压为380 V,可满足主运动电机的现场实际施工需求。
2.3 进给运动系统设计
进给运动系统的主要功能为带动绳锯切割设备沿轨道作进给运动,以实现对无砟轨道结构的不分段水平切割。进给运动系统主要包括进给电机、链轮、横杆、链条和弹性绳等,其结构组成如图6所示。
图6
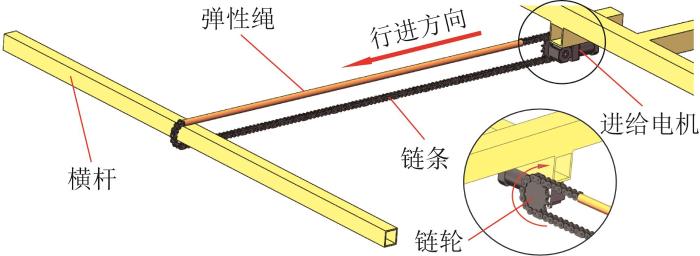
进给电机固定在装载平台上;链条一端与横杆焊接,另一端绕过链轮与弹性绳连接形成闭环;横杆两端置于轨道结构的钢轨底部与轨道板之间的空隙内,通过凸起的承轨台提供反力。进给电机的转动使链轮带动绳锯切割设备在轨道上作进给运动,同时弹性绳的收束可保证链条平直。在实际施工过程中,仅需间隔一段时间向前移动横杆,即可在钻设一个水平导绳孔的情况下实现对无砟轨道结构的不分段水平切割。这一设计克服了现有绳锯切割设备在完成一段切割后需重新铺设导轨再进行切割的分段作业弊端,大幅提高了施工效率。
2.4 张紧系统设计
为保证绳锯切割设备的作业效率和使用寿命,在施工过程中需保证串珠绳的张力在一定范围内并保持恒定。为充分利用装载平台,将张紧系统布置在绳锯切割设备中部,通过上下移动的方式来实现串珠绳的张紧。张紧系统主要包括张紧电机、张紧轮、联轴器、丝杠、丝杠螺母、导轨和滑块等,其结构组成如图7所示。
图7
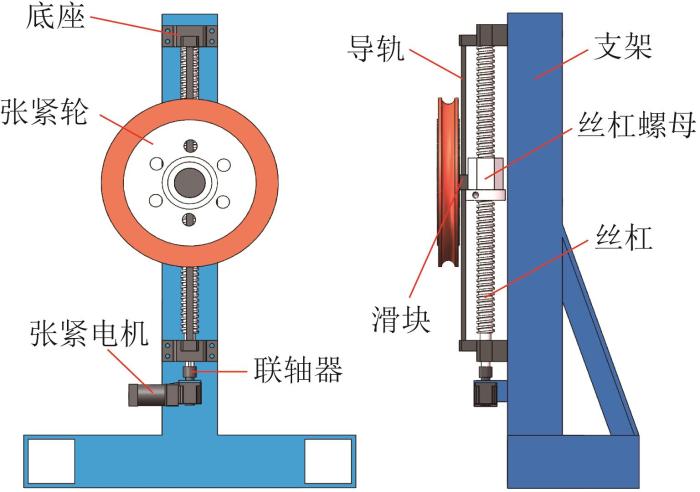
张紧系统采用“丝杠螺母+导轨滑块”的设计形式,通过张紧电机驱动丝杠旋转,使得丝杠螺母带动滑块和张紧轮沿导轨上下移动,实现了串珠绳在切割过程中的实时提升和张紧,大幅减少了卡绳、断绳现象,有效地改善了绳锯切割设备的性能。
2.5 双向切割转换系统设计
为解决高铁线路上拱量过大时需取出轨道板芯来调整高程的问题,设计了可实现水平切割与竖向切割转换的双向切割转换系统。该系统主要包括摆动电机、摆动轮、联轴器、提绳电机、丝杠、丝杠螺母、导轨和滑块等,其结构组成如图8所示。
图8
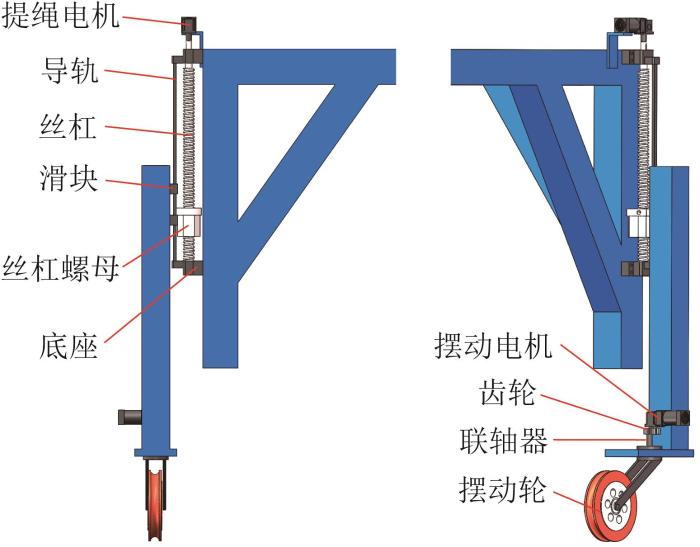
图8
双向切割转换系统结构组成
Fig.8
Structure composition of bidirectional cutting conversion system
在施工过程中,当需要进行水平切割时,利用摆动电机驱动摆动轮,使其方向与轨道板的夹角呈45º,然后通过提绳电机将串珠绳提升至预设高度,以实现水平切割;另外,当发现切割缝不平直时,可通过提升电机实时调节两侧串珠绳的高度,以保证切割缝的精确规整。当需要进行竖向切割以取出轨道板芯时,先利用摆动电机驱动摆动轮,使其方向垂直于轨道板,再通过提绳电机进行竖向提绳,以实现竖向切割。新型绳锯切割设备仅通过摆动电机调整摆动轮的方向,即可实现沿水平和竖直方向的双向切割转换,克服了现有绳锯切割设备的两大弊端:1)需先钻设4个导绳孔,再沿水平和竖直方向各切割2次后,才能取出轨道板芯;2)转换切割方向困难且耗时长。
3 新型绳锯切割设备的静动态特性分析
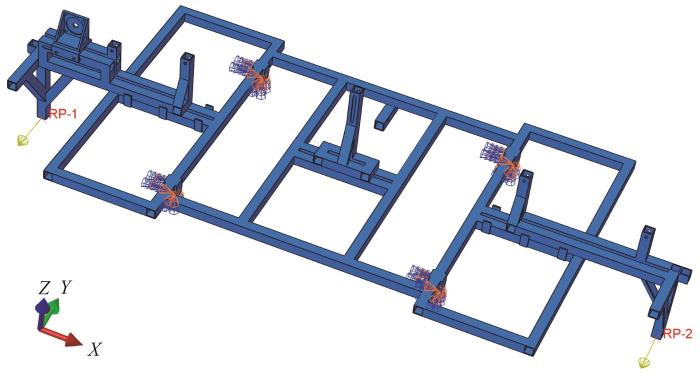
框架式装载平台和导向架是新型绳锯切割设备的主要模块单元,直接影响设备的切割精准性和运行稳定性。本文采用Abaqus软件对新型绳锯切割设备的静动态特性进行数值模拟分析。所构建的新型绳锯切割设备有限元模型如图9所示。其中:装载平台和导向架为Hex单元,采用C3D8R单元类型,其材料为Q235钢,弹性模量为210 GPa,泊松比为0.3,密度为7.8×103 kg/m3。
图9
3.1 静态特性分析
将装载平台的4个滑轮处设为固定约束,进给阻力设置在左右导向架底部,加载方向与进给方向相反,进给阻力取1 kN。通过有限元仿真计算得到新型绳锯切割设备的应力云图和位移云图,如图10所示。
图10
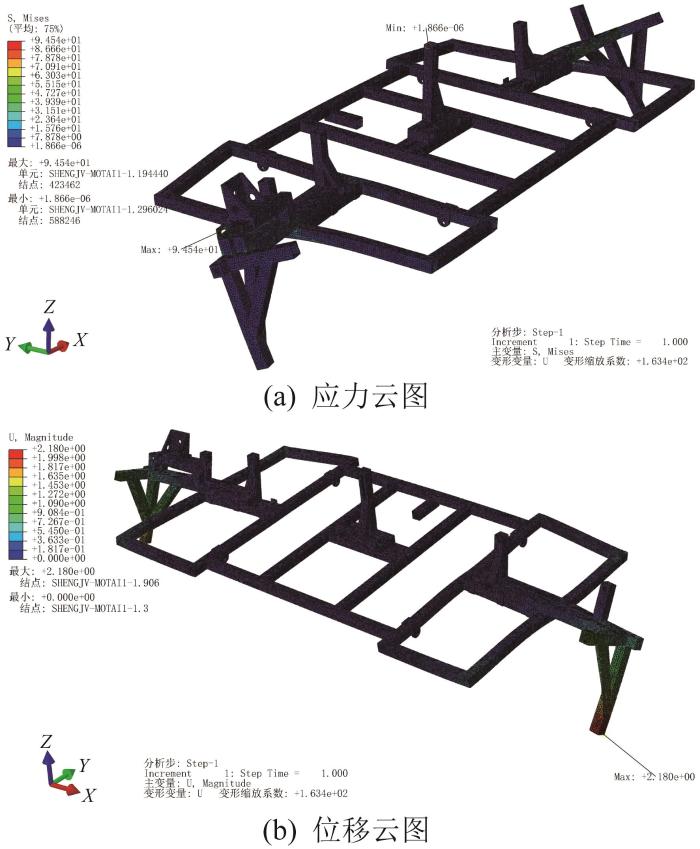
图10
新型绳锯切割设备的应力云图与位移云图
Fig.10
Stress cloud map and displacement cloud map of new rope saw cutting equipment
由图10可知,该绳锯切割设备的最大静态应力出现在主运动电机底座与导向架的连接处,为94.5 MPa,远小于材料的屈服强度235 MPa;其最大静态位移位于导向轮下端,为2.1 mm,小于绳锯切割设备允许的最大变形量4 mm(线路变形修复控制精度为±2 mm)。仿真结果表明,新型绳锯切割设备的结构强度满足设计要求,具有良好的静态特性。
3.2 模态分析
图11
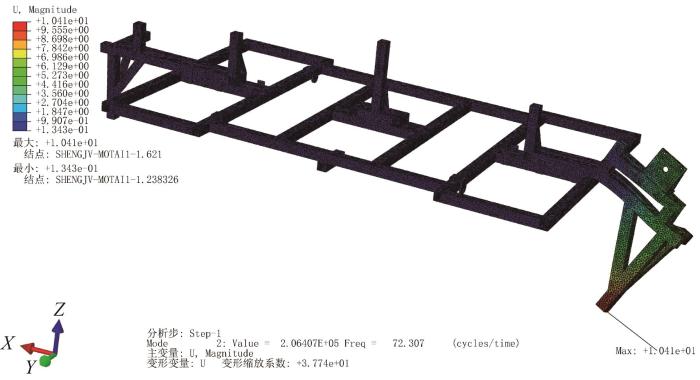
图11
新型绳锯切割设备的二阶模态振型
Fig.11
Second-order modal vibration mode of new rope saw cutting equipment
表1 新型绳锯切割设备的前5阶固有频率和振型
Table 1
| 阶数 | 固有频率/Hz | 振型描述 |
|---|---|---|
| 1 | 7.3×10-4 | 平动 |
| 2 | 72.3 | 在YOZ平面绕X轴弯摆 |
| 3 | 76.7 | 在YOZ平面绕X轴弯摆 |
| 4 | 90.3 | 在XOZ平面绕Y轴弯摆 |
| 5 | 104.1 | 在YOZ平面绕X轴弯摆 |
4 工程应用
4.1 工程概况
某高铁线路全长1 786 km,设计速度为250 km/h,于2014年12月正式开通运营。根据2020年5月轨道线形的检测数据,发现K1968+800—K1969+150段无砟轨道线路发生了不同程度的上拱变形,上下行线路最大上拱量分别达到44 mm和64 mm,已超过扣件的最大调整量(-4~26 mm),亟须进行修复整治。
4.2 施工操作
该修复工程的具体操作如下:首先,采用绳锯切割设备对支承层进行切割落道,调整轨道结构高程后灌浆填充;然后,采用植筋加固工艺对轨道结构进行修复。当“天窗点”作业时间开始后,运维人员先将绳锯切割设备的各模块单元搬运至高铁线路上,使用装载平台作为运输工具将各模块单元快速推行至施工区域;然后,通过螺杆等连接件将各模块单元组装固定,将金刚石串珠绳穿过预先钻设的水平导绳孔,以绕过主动轮与各导向轮形成环路,随后安装防护罩;最后,将电控柜与设备连接,并预留足够长度的供电电缆和通信电缆,完成切割前的准备工作。新型绳锯切割设备组装示意如图12所示。
图12
在开始切割作业时,先启动主运动电机,带动金刚石串珠绳高速运动,随后启动进给电机,使绳锯切割设备在轨道上作进给运动,以对无砟轨道结构进行不分段水平切割;当需要进行竖向切割以取出轨道板芯时,采用摆动电机调整摆动轮的方向,并通过提绳电机进行竖向提绳,以实现竖向切割;当施工结束后,关闭电源,断开串珠绳,拆卸绳锯切割设备的各模块单元并将其放置在装载平台上,并快速运输至通道门,搬运至铁路栅栏外。
4.3 现场施工效果
根据现场实际施工情况,新型绳锯切割设备沿线路纵向的平均切割速率为2 m/h(轨道板宽度为3.4 m),较现有绳锯切割设备的1.2 m/h提高了66.7%;考虑设备运输、组装拆卸、切割高度及方向调整等因素,新型绳锯切割设备的综合施工效率约提高了1倍,同时可保证切割缝精确规整。新型绳锯切割设备的现场施工效果如图13所示。
图13
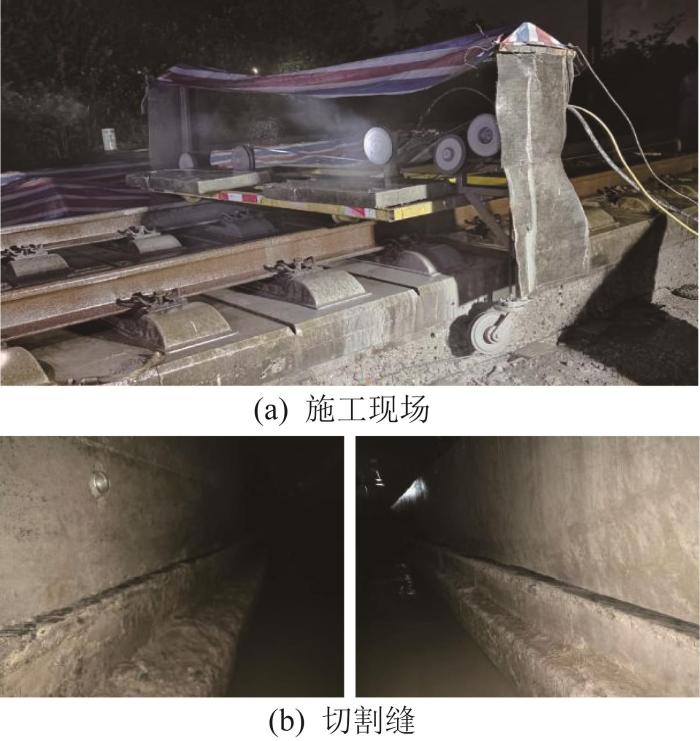
图13
新型绳锯切割设备现场施工效果
Fig.13
On-site construction effect of new rope saw cutting equipment
该修复工程自2020年6月21日开工,至2020年9月15日结束,历经87天;上下行共采用4台新型绳锯切割设备进行了25天的切割施工,每台设备的总切割长度为175 m,平均每个“天窗点”切割7 m,单个“天窗点”有效工作时间约为3.5 h,切割速率为2 m/h。经过后续落道、灌浆、植筋、精调修复后,该高铁线路已于2020年9月逐级提速恢复至常速250 km/h正常运营,截至目前未见异常。现场实践表明,所研制的新型绳锯切割设备运行稳定,施工效率高,切割缝精确规整,完全满足高铁运维“受限空间”和“天窗点”短时间作业的要求,可用于后续无砟轨道线路变形修复工程。
5 结 论
针对运营高铁无砟轨道线路的变形问题,在分析现有修复技术和绳锯切割设备功能的基础上,考虑高铁运维的“受限空间”和“天窗点”短时间作业特点,研制了一款新型的多功能绳锯切割设备,并成功应用于工程实践,所得结论如下。
1)新型绳锯切割设备采用轻质模块化设计,具有自主移动、不分段水平切割、双向转换切割等多个功能,适用于高铁运维领域,可为无砟轨道结构的解离提供便捷高效的切割工具。
2)新型绳锯切割设备的最大静态应力和位移分别为94.5 MPa和2.1 mm,均小于允许值(235 MPa和4 mm),其前5阶固有频率与主运动电机的标准振动频率25 Hz相差较大。结果表明,所研制的新型绳锯切割设备的静动态特性良好,其切割精准性和运行稳定性均满足设计要求。
3)新型绳锯切割设备已成功应用于某高铁无砟轨道线路变形修复工程。现场实际施工表明,该绳锯切割设备的综合施工效率较现有设备约提高了1倍,这可为后续类似工程的实施提供参考,进一步完善了运营高铁无砟轨道线路变形修复技术。
参考文献
高速铁路基础结构动态性能演变及服役安全的基础科学问题
[J].
Basic scientific issues on dynamic performance evolution of the high-speed railway infrastructure and its service safety
[J].DOI:10.1360/n092014-00192 [本文引用: 1]
兰新第二双线某段路基上拱变形原因分析及整治措施研究
[D].
Analysis on the deformation of the upper arch of a section of subgrade in the second double track of Lanxin and study on the treatment measures
[D].
高速铁路无砟轨道区段路基上拱整治技术
[J].
Treatment method of subgrade heaving in ballastless track section of high speed railway
[J].
高速铁路隧道内双块式无砟轨道上拱整治方案
[J].
Treatment scheme on heaving of double-block ballastless track in tunnel of high speed railway
[J].
基于绳锯切割的高速铁路纵连板式无砟轨道支承层修复技术
[J].
Research on repair technology of supporting layer of longitudinal slab ballastless track of high speed railway based on wire saw cutting
[J].
金刚石串珠绳锯锯切技术研究现状与发展
[J].
Current situation and development of diamond wire saw cutting technology
[J].
组合工法配套设备拆除钢筋混凝土支撑技术
[J].
Demolition technology for reinforced concrete bracing by combined method with corollary equipment
[J].
近10年金刚石绳锯技术最新发展及展望
[J].
The latest development and prospects of diamond wire saw technology in the past 10 years
[J].
金刚石绳锯机设计
[J].
Design of diamond wire saw
[J].
水下金刚石绳锯机机械本体设计及切削性能研究
[D].
Design of underwater diamond wire saw and research of cutting properties
[D].
梁柱预埋孔机械切割异地爆破绿色拆除技术
[J].
Green demolishing technology of beams or columns with embedded holes by mechanical cutting and off-site blasting
[J].
串珠绳自适应调节式绳锯机的结构及控制系统设计
[D].
Structural and control system design of beaded rope adaptive self-adjusting wire saw
[D].
基于人机工程的矿山绳锯机交互设计
[J].
Research on interactive design of mine wire saw machine based on ergonomics
[J].
基于进给速度及力耦合控制的绳锯机设计及切削性能研究
[D].
Design of wire saw based on feeding speed and force coupling control and research on cutting properties
[D].
金刚石串珠绳锯切割受载煤体试验装置的研制及受力分析
[J].
Development and force analysis of diamond beaded wire saw cutting loaded coal test device
[J].
六轮多绳金刚石串珠锯创新设计与优化研究
[D].
The innovation design and optimization research on six-wheeled multi-wire saw
[D].
两轮多绳金刚石串珠锯创新设计与优化研究
[D].
The innovation design and optimization research on two-wheeled multi-wire saw
[D].
基于图形法的海洋废弃平台桩基拆除绳锯机切割动力学模型的建立
[J].
Model establishment for wire saw cutting kinetics of offshore discarded platform piles removal basing on GTM
[J].
锯切参数对串珠绳振动特性的影响
[J].
Influence of sawing parameters on the vibration characteristics of diamond wire saw
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}