采用电推进动力形式的高空长航时无人机具有飞行高度高、续航时间长等优点,在执行长时间高空侦察监视、导航预警、空间攻防等任务中发挥着重要作用[1 -4 ] 。高空长航时无人机的电推进系统主要由螺旋桨和电动机组成,与喷气式动力系统的飞发一体化相比,螺旋桨动力系统的耦合效应更为显著。因此,在无人机方案设计阶段及后期使用阶段,均须开展整机、螺旋桨、发动机三者之间的匹配优化设计,以实现无人机在整个飞行包线内具备最佳的动力特性及经济性,从而提升其在复杂环境下的生存能力。
目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] 。史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%。由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论。
然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计。例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致。Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8。刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性。Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性。Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化。焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能。口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%。刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593。然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题。
基于此,本文从无人机的总体动力需求出发,在明确电动机选型的基础上,利用单点法确定螺旋桨的最佳总体参数,并通过开展地面静态试验来测试电推进系统的动力特性,由此来验证对应总体参数建模方法的准确性。同时,针对电推进系统虽基本满足无人机全剖面的动力需求,但总效率有待提升的问题,采用BP(back propagation,反向传播)神经网络建立电推进系统桨发匹配代理模型,在保持电动机输出功率、效率不变的情况下,通过不断迭代优化螺旋桨的总体参数设计模型,以进一步提升螺旋桨及电推进系统的效率。
1 无人机总体动力需求
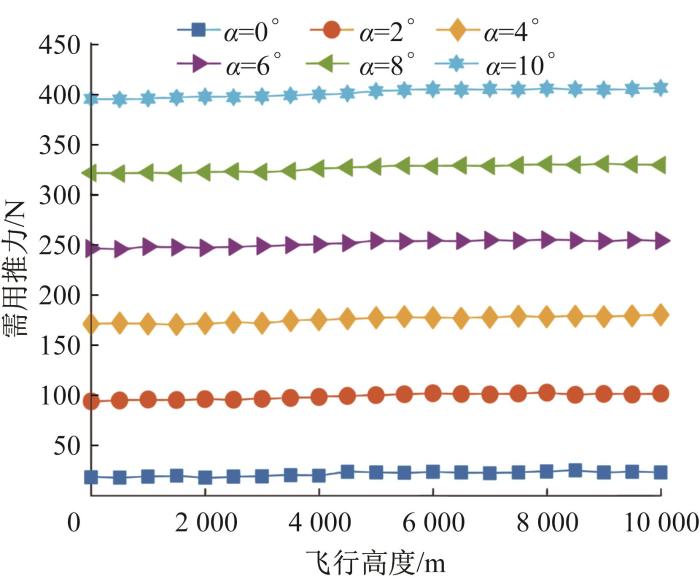
无人机的电推进系统拟采用多套对称布置的推进装置,每套推进装置包括1台电动机和1个螺旋桨。要求单套推进装置的系统效率不低于0.6,并能满足图1 所示的平飞及爬升剖面(爬升角α =2°, 4°, 6°, 8°, 10°)的推力需求。由图1 可以发现,随着飞行高度、爬升角的增加,无人机要求单套推进装置所能提供的推力逐渐增大。经初步评估,单台电动机的额定功率为4~5 kW时可符合上述要求。
图1
图1
无人机的需用推力与飞行高度、爬升角的关系(针对单套推进装置)
Fig.1
Relationship between required thrust of unmanned aerial vehicle and flight altitude and climb angle (for a single propulsion device)
2 无人机电推进系统桨发匹配设计
2.1 电动机总体参数设计
本文采用功率损失法对电动机进行建模。不同于等效电路法,功率损失法通过结合物理原理及工程经验来对电动机的损耗进行计算,在匹配货架电动机及新研电动机时均适用[20 ] 。在功率损失法的建模过程中,电动机的效率η e 可由式(1)计算得到:
η e = P e P e + P L (1)
P e = w q
P L = P f i c + P w i n + P c o p + P i r o n + P c o n t
式中:P e 为电动机的输出功率,w 、q 分别为电动机的转动角速度和输出扭矩,P L 为电动机的损耗功率,P fic 、P win 、P cop 、P iron 、P cont 分别为电动机的机械损耗功率、风阻损耗功率、铜耗功率、铁耗功率及恒定损耗功率。
针对电动机损耗功率P L 的求解,Larminie和Lowry[21 ] 推导了式(2)所示的多项式,完成了参数化电动机模型的搭建,从而获得电动机的总体参数。
P L = f ( w , q ) = C 0 + C 1 w + C 2 w 2 + C 3 q 3 (2)
C 0 = a q e f f , m w e f f , m 6 1 - η e f f , m η e f f , m C 1 = - 3 C 0 2 w e f f , m + ( 1 - η e f f , m ) q e f f , m 4 η e f f , m C 2 = C 0 2 w e f f , m 3 + ( 1 - η e f f , m ) q e f f , m 4 η e f f , m w e f f , m 2 C 3 = ( 1 - η e f f , m ) w e f f , m 2 η e f f , m q e f f , m
式中:η eff, m 为电动机的峰值效率,q eff, m 、w eff, m 分别为电动机峰值效率所对应的输出扭矩和转动角速度,a 为电动机的固定损耗系数。
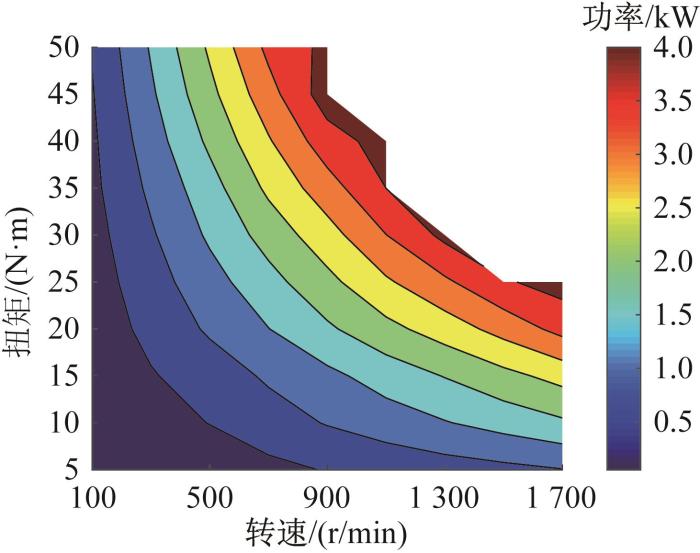
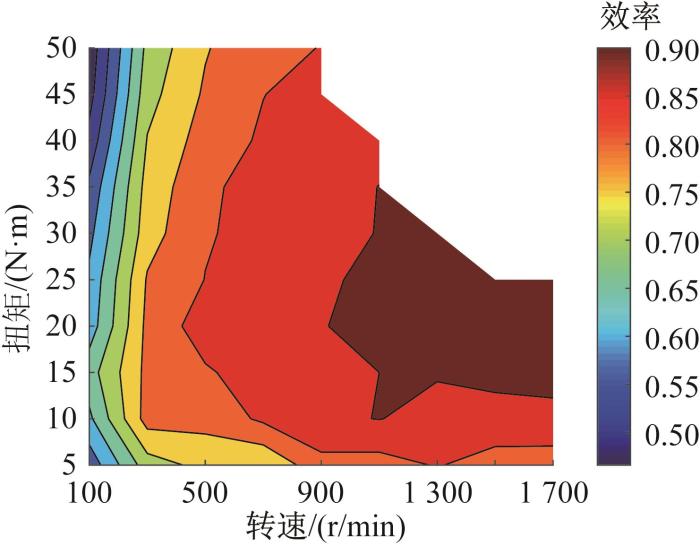
完成上述电动机总体参数建模后,为无人机电推进系统选配的电动机为永磁同步电动机,其驱动器与本体之间为一体化设计,额定功率为4.2 kW,额定电压为270 V(直流电压),峰值扭矩大于等于50 N·m。电动机与无人机动力舱之间通过螺栓贯穿电动机本体外壳面耳片来实现紧固。考虑到高空对流效应弱,电动机本体及驱动器均设计裸露式肋片,以强化换热能力;电动机输出轴采用花键输出扭矩,以带动螺旋桨克服反扭矩做功,从而为无人机提供稳定、可靠的拉力。图2 和图3 所示分别为所选配永磁同步电动机的功率、效率随转速和扭矩变化的分布情况。
图2
图2
永磁同步电动机的功率分布
Fig.2
Power distribution of permanent magnet synchronous motor
图3
图3
永磁同步电动机的效率分布
Fig.3
Efficiency distribution of permanent magnet synchronous motor
2.2 螺旋桨总体参数设计
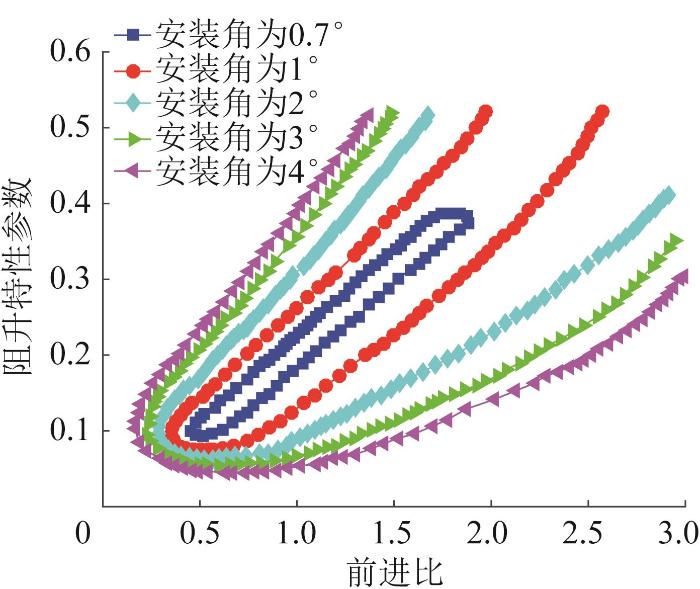
在明确了电动机的输出功率、转速、扭矩特性后,基于单点法开展螺旋桨总体参数设计,以确定螺旋桨的直径、效率、平面形状、转速及功率等,从而为螺旋桨的设计与选型提供参考。在单点法中,假设桨叶75%半径处的叶素升阻比可表征整个桨叶的升阻比。基于单点法确定定距螺旋桨的步骤如下:1)利用式(3)至式(6)依次计算不同桨叶直径下的螺旋桨功率系数C p 、桨叶效用因子A F 、前进比J 、阻升特性参数L 0 ;2)考虑高空螺旋桨在不同高度下(宽工况)的使用,设定初始升力系数为0.7,并根据图4 所示的螺旋桨阻升特性曲线获得相应的叶素安装角;3)获得叶素安装角后,利用式(7)进一步计算螺旋桨的叶素阻升角γ ;4)在确定了螺旋桨的几何参数后,结合叶素理论[22 -23 ] ,利用式(8)和式(9)分别计算螺旋桨的拉力F p 及效率η p 等气动特性参数。
C p = P e ρ n p 3 d 3 (3)
A F = 1 562 c d (4)
J = v n p d (5)
L 0 = 400 C p B A F (6)
γ = a r c t a n d L (7)
F p ≈ ρ C l c v 2 ( 0.9 R - 0.6 R ) c o s ( γ + κ ) γ (8)
η p ≈ t a n κ t a n ( γ + κ ) (9)
C l = 2 L v 0 2 A
式中:ρ 为大气密度,n p 为螺旋桨转速,d 为桨叶直径,c 为桨叶弦长,v 为气流相对于螺旋桨叶素所产生的合速度,B 为桨叶数量,L 为螺旋桨升力,v 0 为螺旋桨的前飞速度,C l 为升力系数,R 为螺旋桨半径,κ 为合速度方向与叶素旋转平面之间的夹角,A 为桨盘面积。
图4
图4
螺旋桨阻升特性曲线
Fig.4
Drag and lift characteristic curve of propeller
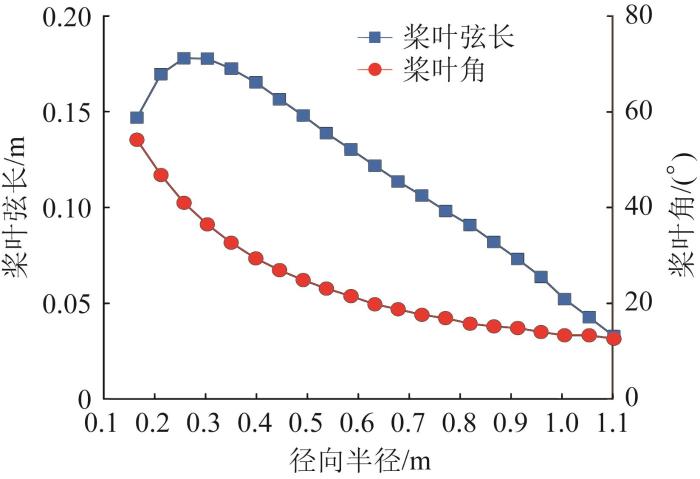
对于本文的无人机电推进系统,单套推进装置中螺旋桨的桨叶数取2,直径为2 200 mm。经上述方法设计求解后,确定采用以高升力Eppler387翼型为基础构型的高空螺旋桨。图5 所示为所选高空螺旋桨的桨叶弦长及桨叶角随径向半径的变化曲线。结果表明,在约28%的桨叶径向半径处,桨叶弦长达到最大值,而桨叶角随径向半径的增大而减小。
图5
图5
桨叶弦长及桨叶角分布
Fig.5
Distribution of paddle chord length and blade angle
2.3 电推进系统的地面性能测试
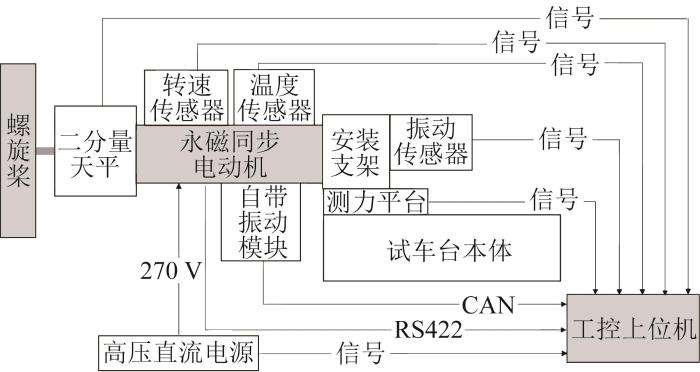
通过开展地面静态试验来对无人机电推进系统桨发匹配后的动力特性进行测试,试验系统如图6 所示,主要包括电动机、螺旋桨、工控上位机、二分量天平及一系列传感器。在试验过程中,工控上位机模拟飞行管理计算机以实现通信控制功能,并记录试验系统所反馈的拉力、扭矩、温度、振动加速度、电压和电流等参数。在电动机与螺旋桨之间设置二分量天平,其最大测力、扭矩分别可达400 N和80 N·m,综合精度为0.1%FS(full scale,全量程)。在二分量天平正下方设置转速传感器,其量程为0~2 000 r/min,精度为0.5%FS,用于实时测量电推进系统的转速。
图6
图6
地面静态试验系统及其交联关系
Fig.6
Ground static test system and its cross-linking relationship
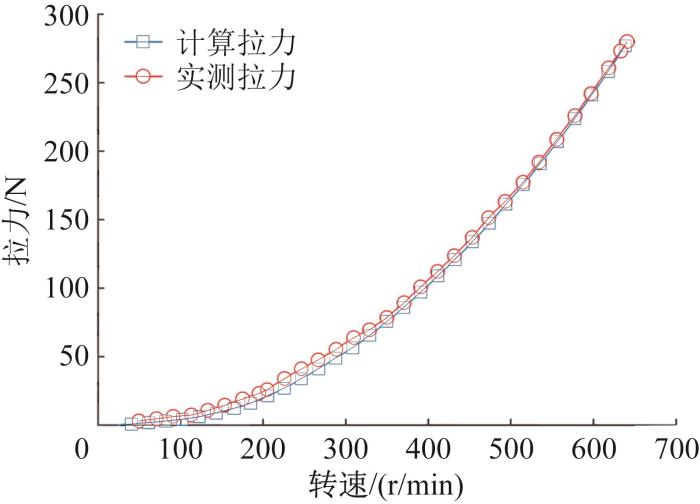
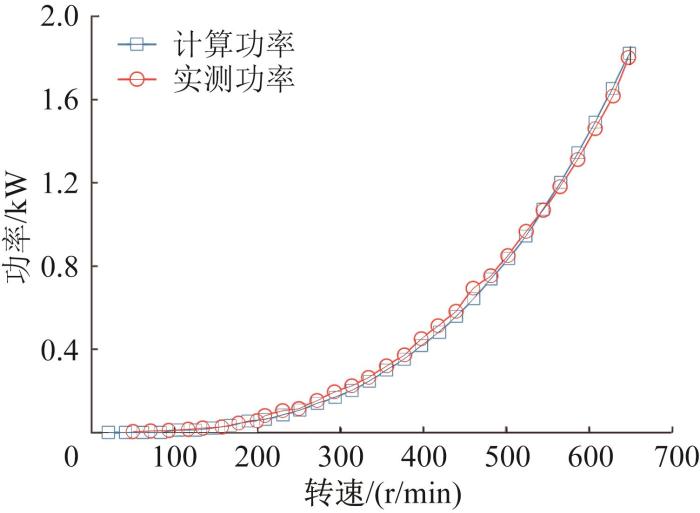
通过地面静态试验测得电推进系统的拉力与功率,并与计算结果进行对比,分别如图7 和图8 所示。结果表明,随着电推进系统转速的提高,其拉力、功率的实测值与计算值均逐渐增大;从整体上看,实测值稍高于计算值,但两者之间的差异极其微小,有很好的一致性。由此说明,所采用的电推进系统桨发匹配设计方法具有很高的准确性。
图7
图7
电推进系统拉力的实测结果与计算结果对比
Fig.7
Comparison of measured results and calculated results of tensile force of electric propulsion system
图8
图8
电推进系统功率的实测结果与计算结果对比
Fig.8
Comparison of measured results and calculated results of power of electric propulsion system
3 无人机电推进系统的桨发匹配代理模型
经后期使用发现,所匹配的电推进系统虽能基本满足无人机在平飞及爬升阶段的效率、推力需求,但效率仍有提升空间。传统的桨发匹配多以电动机、螺旋桨单独建模,并采用数据回归的显式方法。但是,定距螺旋桨的性能受到多个参数的影响,在相同前进比下可能对应多个气动特性,与电动机匹配起来较为困难。同时,回归方法通常假设自变量与因变量之间存在线性关系,而实际数据往往非线性特征明显,从而导致回归模型的精度较低。鉴于神经网络在解决复杂非线性问题时具有一定优势,本文拟建立基于传统BP神经网络的代理模型,以开展无人机桨发匹配及效率提升研究。
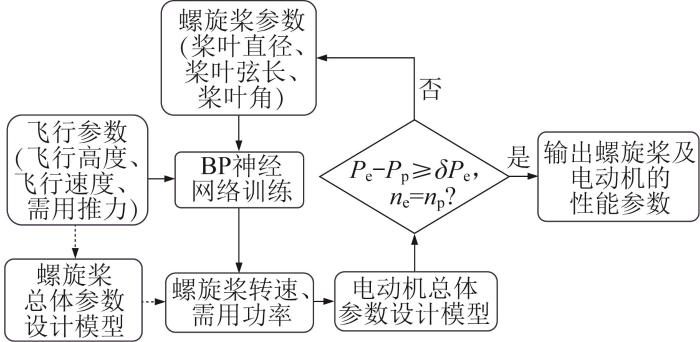
电推进系统桨发匹配代理模型的框架结构如图9 所示。首先,根据无人机总体推力、飞行高度、飞行速度的需求,结合螺旋桨总体参数设计模型得到螺旋桨的转速和需用功率。然后,将螺旋桨的转速、需用功率代入电动机总体参数设计模型,以匹配在相应转速、扭矩下的功率情况:若匹配点条件成立,则输出螺旋桨和电动机的性能参数,并为电动机的控制提供输入条件;若匹配点条件不成立,则返回并修改螺旋桨的参数,再运用BP神经网络模型进行螺旋桨输入参数与转速、功率等输出参数之间的映射、预测,以获得修正后的螺旋桨性能参数,并再次代入电动机总体参数设计模型,经过不断的循环迭代,最终实现桨发匹配。图9 中,P p 为螺旋桨的需用功率;n e 为电动机的转速;δ 为容忍度,本文取5%。
图9
图9
电推进系统桨发匹配代理模型架构
Fig.9
Propeller-motor matching surrogate model architecture for electric propulsion system
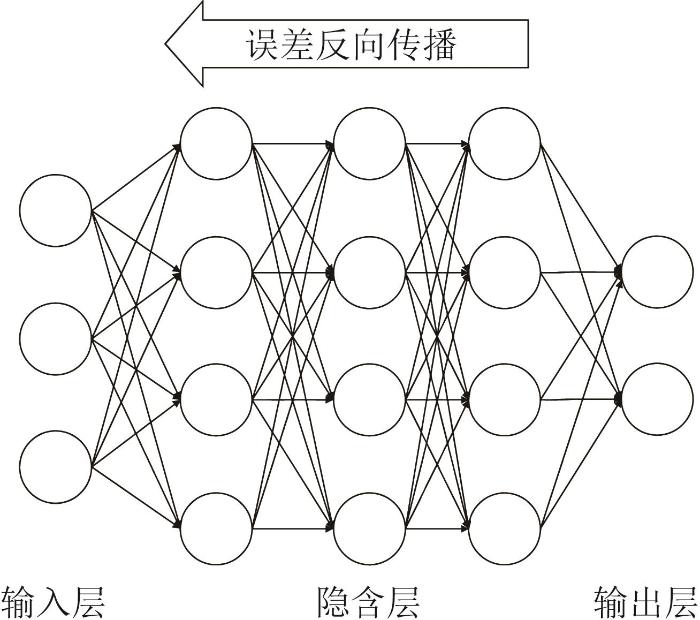
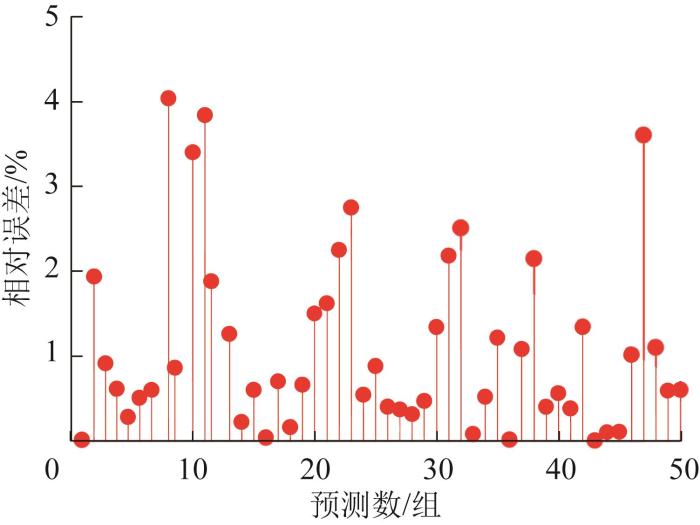
BP神经网络属于单向传播的多层前馈网络(误差负反馈),其拓扑结构如图10 所示,包含输入层、隐含层(可有多层)和输出层。性能优异的BP神经网络模型的确定是一个反复训练、不断调整参数的过程,包括确定各层神经元个数、隐含层层数、学习率、传递函数及训练算法等[24 ] 。在正式优化螺旋桨参数前,先将基于螺旋桨总体参数设计模型求解得到的初始螺旋桨参数代入BP神经网络模型,以验证其训练与预测的准确性。BP神经网络模型的输入变量包括螺旋桨参数(桨叶直径、桨叶弦长、桨叶角)和飞行参数(飞行高度、飞行速度、需用推力)等6个参数,输出变量为螺旋桨转速、需用功率。为了防止过拟合/欠拟合现象,训练集与预测集按7∶3的比例划分,其中训练集为118组,预测集为50组。经过反复的敏感性分析,最终确定的BP神经网络模型具体为:输入层神经元个数为3,隐含层层数为2,隐含层神经元个数为5,输出层神经元个数为2;学习率设为0.1,传递函数选择正切Sigmoid函数,训练过程采用Levenberg-Marquardt算法,并结合梯度下降法加速、优化寻找局部最小值。如图11 所示,经过多次迭代训练后,BP神经网络模型的预测精度较高,对螺旋桨需用功率预测的相对误差在5%以下。此外,在实际预测中,该模型对螺旋桨转速的预测精度高于对需用功率的预测。由此说明,基于BP神经网络的代理模型可用于螺旋桨参数的优化,最终实现电推进系统的桨发匹配及效率提升。
图10
图10
多隐含层BP 神经网络的拓扑结构
Fig.10
Topology structure of BP neural network with multi-hidden layers
图11
图11
螺旋桨需用功率预测的相对误差
Fig.11
Relative error in predicting required power of propeller
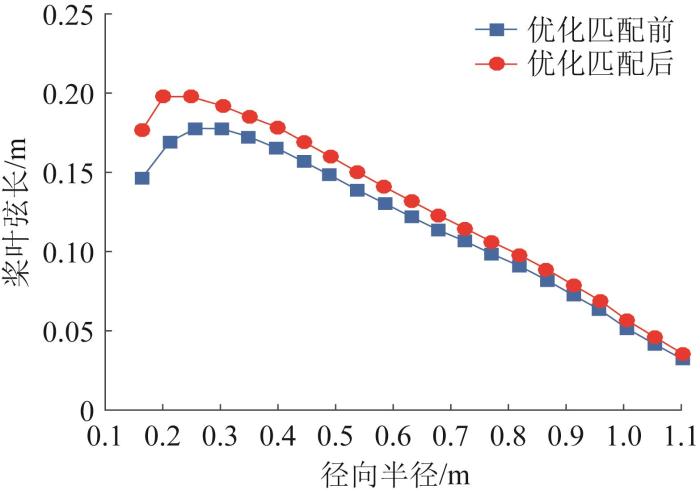
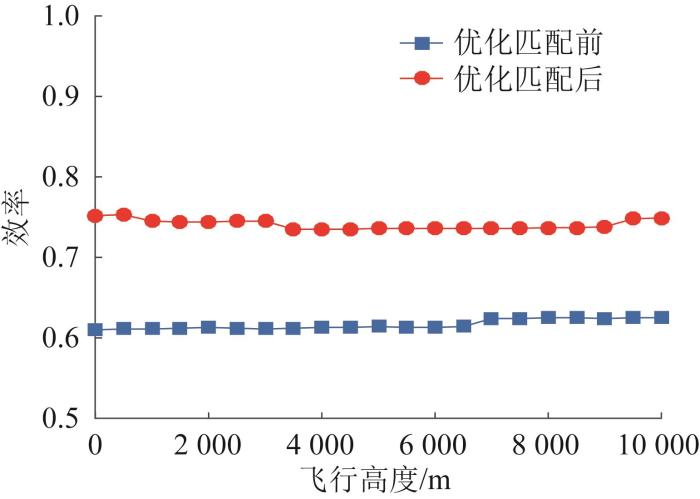
在整个优化匹配过程中,保持螺旋桨直径、高度、桨叶数量及需用推力等参数不变,重点考察桨叶弦长分布对螺旋桨整体效率的影响,以确定螺旋桨参数的最优解。图12 所示为经代理模型优化匹配前后螺旋桨的桨叶弦长分布情况。从图12 中可以看出,新螺旋桨的桨叶弦长沿半径方向仍呈先增大后减小的变化趋势,但桨叶弦长整体上比旧螺旋桨大,桨叶弦长峰值较旧螺旋桨提前了10%,出现在18%的桨叶径向半径处。图13 所示为无人机以5°仰角爬升时螺旋桨效率的变化情况。由图13 可知,在维持电动机输出功率和效率基本不变的情况下,在整个爬升剖面上新螺旋桨的效率约提升了0.1,提升效果显著。这是因为增大桨叶弦长有效提高了雷诺数和升阻比,使得螺旋桨叶素效率随之提高[25 ] 。
图12
图12
优化匹配前后桨叶弦长分布对比
Fig.12
Comparison of paddle chord length distribution before and after optimized matching
图13
图13
优化匹配前后螺旋桨效率对比
Fig.13
Comparison of propeller efficiency before and after optimized matching
4 结 论
从满足无人机平飞及爬升剖面推力及效率需求出发,分别采用功率损失法和单点法对电动机、螺旋桨进行总体参数匹配设计,并通过开展地面静态试验对优化匹配后电推进系统的动力特性进行测试。为克服传统数据回归模型精度较低以及匹配较为困难的问题,设计了一种基于BP神经网络的代理模型,用于开展无人机桨发匹配及效率提升研究。所得结论如下:
1)地面静态试验结果表明,所采用的电动机、螺旋桨总体参数匹配设计方法具有较高精度,在用于电推进系统桨发匹配设计时可基本满足无人机的总体动力需求。
2)所建立的电推进系统桨发匹配代理模型可有效改善传统匹配方法精度低的问题,能够进一步提升螺旋桨及电推进系统的效率,节能效果显著。
3)基于代理模型的桨发匹配及效率提升方法可为无人机电推进系统方案设计及后期工程使用阶段的匹配优化提供有力工具。通过合理调整无人机电推进系统的桨发匹配方案,有望实现无人机在整个飞行包线内兼具最佳的动力特性及经济性。
参考文献
View Option
[14]
PARK D LEE Y CHO T et al Design and performance evaluation of propeller for solar-powered high-altitude long-endurance unmanned aerial vehicle
[J]. International Journal of Aerospace Engineering , 2018 , 2018 : 5782017 .
[本文引用: 1]
[15]
LIU X Q HE W L WEI F M Design of high altitude propeller using multilevel optimization
[J]. International Journal of Computational Methods , 2020 , 17 (4 ): 1950004 .
[本文引用: 1]
[16]
焦俊 , 宋笔锋 , 张玉刚 , 等 高空飞艇螺旋桨优化设计与气动性能车载试验
[J]. 航空动力学报 , 2017 , 32 (1 ): 196 -202 .
[本文引用: 1]
JIAO J SONG B F ZHANG Y G et al Optimal design and truck-mounted testing of aerodynamic performance for the propeller of high altitude airship
[J]. Journal of Aerospace Power , 2017 , 32 (1 ): 196 -202 .
[本文引用: 1]
[17]
李星辉 , 李权 , 张健 太阳能无人机高效螺旋桨气动设计
[J]. 航空工程进展 , 2020 , 11 (2 ): 220 -225 , 238 .
[本文引用: 1]
LI X H LI Q ZHANG J Aerodynamic design of a high efficient solar powered UAV propeller
[J]. Advances in Aeronautical Science and Engineering , 2020 , 11 (2 ): 220 -225 , 238 .
[本文引用: 1]
[18]
口启慧 , 王海峰 , 刘坤澎 , 等 基于一种贝叶斯优化框架的高空螺旋桨气动优化设计
[J]. 空气动力学学报 , 2023 , 41 (4 ): 96 -103 .
[本文引用: 1]
KOU Q H WANG H F LIU K P et al Aerodynamic design of high-altitude propellers within a Bayesian optimization framework
[J]. Acta Aerodynamica Sinica , 2023 , 41 (4 ): 96 -103 .
[本文引用: 1]
[19]
刘新强 , 贺卫亮 平流层飞艇动力推进系统的分析与设计
[J]. 航空动力学报 , 2015 , 30 (6 ): 1407 -1413 .
[本文引用: 1]
LIU X Q HE W L Analysis and design of stratospheric airship propulsion system
[J]. Journal of Aerospace Power , 2015 , 30 (6 ): 1407 -1413 .
[本文引用: 1]
[20]
McDONALD R A Electric propulsion modeling for conceptual air-craft design
[C]//52nd Aerospace Sciences Meeting . National Harbor, Maryland, Jan . 13 -17 , 2014 .
[本文引用: 1]
[21]
LARMINIE J LOWRY J Electric vehicle technology explained [M]. 2nd ed . Hoboken : John Wiley & Sons , 2012 .
[本文引用: 1]
[1]
马东立 , 张良 , 杨穆清 , 等 超长航时太阳能无人机关键技术综述
[J]. 航空学报 , 2020 , 41 (3 ): 623418 .
[本文引用: 1]
MA D L ZHANG L YANG M Q et al Review of key technologies of ultra-long-endurance solar powered unmanned aerial vehicle
[J]. Acta Aeronautica et Astronautica Sinica , 2020 , 41 (3 ): 623418 .
[本文引用: 1]
[2]
石文 , 贾永清 , 李广佳 , 等 高空超长航时太阳能无人机主要技术问题分析
[J]. 飞航导弹 , 2021 (6 ): 63 -66 , 104 .
SHI W JIA Y Q LI G J et al Analysis of main technical problems of high altitude and ultra-long endurance solar unmanned aerial vehicle
[J]. Aerodynamic Missile Journal , 2021 (6 ): 63 -66 , 104 .
[22]
刘沛清 空气螺旋桨理论及其应用 [M]. 北京 : 北京航空航天大学出版社 , 2006 : 93 -94 .
[本文引用: 1]
LIU P Q Air propeller theory and application [M]. Beijing : Beihang University Press , 2006 : 93 -94 .
[本文引用: 1]
[23]
CHANDUKRISHNA Y VENKATESH T N Vorticity confinement technique and blade element method for accurate propeller modelling
[J]. International Journal of Computational Fluid Dynamics , 2022 , 36 (8 ): 719 -730 .
[本文引用: 1]
[24]
赵所 , 林立 , 李震 , 等 基于BP神经网络的甲板运动预报与补偿技术
[J]. 北京航空航天大学学报 , 2024 , 50 (9 ): 2772 -2780 .
[本文引用: 1]
[3]
ZHANG B W SONG Z X ZHAO F et al Overview of propulsion systems for unmanned aerial vehicles
[J]. Energies , 2022 , 15 (2 ): 455 .
[4]
杨希祥 , 侯中喜 , 郭正 高空长航时太阳能飞机研究进展与技术挑战
[J]. 国防科技大学学报 , 2023 , 45 (6 ): 1 -9 .
[本文引用: 1]
[24]
ZHAO S LIN L LI Z et al Deck motion prediction and compensation technology based on BP neural network
[J]. Journal of Beijing University of Aeronautics and Astronautics , 2024 , 50 (9 ): 2772 -2780 .
[本文引用: 1]
[25]
雷光新 , 刘巍 , 杨涛 , 等 平流层飞艇螺旋桨设计参数对效率的影响
[J]. 计算机仿真 , 2011 , 28 (5 ): 56 -59 .
[本文引用: 1]
LEI G X LIU W YANG T et al Design parameters effects on propeller efficiency of stratosphere airship
[J]. Computer Simulation , 2011 , 28 (5 ): 56 -59 .
[本文引用: 1]
[4]
YANG X X HOU Z X GUO Z Development status and technology challenges of high-altitude long-endurance solar-powered aircraft
[J]. Journal of National University of Defense Technology , 2023 , 45 (6 ): 1 -9 .
[本文引用: 1]
[5]
林漫群 , 王国文 , 张士志 , 等 无人机推进系统螺旋桨与发动机匹配实验研究
[J]. 航天制造技术 , 2016 (3 ): 1 -4 , 9 .
[本文引用: 1]
LIN M Q WANG G W ZHANG S Z et al Experimental study on propeller-engine matching of UAV propulsion system
[J]. Aerospace Manufacturing Technology , 2016 (3 ): 1 -4 , 9 .
[本文引用: 1]
[6]
温占永 , 罗洋 中空长航时无人机恒速螺旋桨与发动机匹配研究
[J]. 航空工程进展 , 2020 , 11 (5 ): 672 -678 .
WEN Z Y LUO Y Study on matching constant speed propeller for piston engine on MALE UAV
[J]. Advances in Aeronautical Science and Engineering , 2020 , 11 (5 ): 672 -678 .
[7]
张翼 , 吴晴 无人机动力推进系统的选型与性能匹配分析
[J]. 航天制造技术 , 2022 (1 ): 41 -45 , 73 .
ZHANG Y WU Q Analysis on selection and performance matching of UAV propulsion system
[J]. Aerospace Manufacturing Technology , 2022 (1 ): 41 -45 , 73 .
[8]
杨彦林 , 王哲 某型通航飞机桨发匹配性能分析方法研究
[J]. 科技与创新 , 2023 (17 ): 86 -88 .
[本文引用: 1]
YANG Y L WANG Z Research on performance analysis method of propeller-engine matching for a certain navigable aircraft
[J]. Science and Technology & Innovation , 2023 (17 ): 86 -88 .
[本文引用: 1]
[9]
史永运 , 钟易成 , 邓君湘 , 等 涡轮螺旋桨动力飞机桨发匹配性能仿真研究
[J]. 机械制造与自动化 , 2019 , 48 (4 ): 116 -120 .
[本文引用: 1]
SHI Y Y ZHONG Y C DENG J X et al Research on prop-engine cooperation performance simulation of propeller powered aircraft
[J]. Machine Building & Automation , 2019 , 48 (4 ): 116 -120 .
[本文引用: 1]
[10]
TANG J WANG X DUAN D et al Optimisation and analysis of efficiency for contra-rotating propellers for high-altitude airships
[J]. The Aeronautical Journal , 2019 , 123 (1263 ): 706 -726 .
[本文引用: 1]
[11]
MORGADO J ABDOLLAHZADEH M SILVESTRE M A R et al High altitude propeller design and analysis
[J]. Aerospace Science and Technology , 2015 , 45 : 398 -407 .
[本文引用: 1]
[12]
YAO Y MA D L ZHANG L et al Aerodynamic optimization and analysis of low Reynolds number propeller with gurney flap for ultra-high-altitude unmanned aerial vehicle
[J]. Applied Sciences , 2022 , 12 (6 ): 3195 .
[本文引用: 1]
[13]
刘晓春 , 祝小平 , 周洲 , 等 基于太阳能飞机应用的低雷诺数翼型研究
[J]. 航空学报 , 2017 , 38 (4 ): 120459 .
[本文引用: 1]
LIU X C ZHU X P ZHOU Z et al Research on low Reynolds number airfoils based on application of solar-powered aircraft
[J]. Acta Aeronautica et Astronautica Sinica , 2017 , 38 (4 ): 120459 .
[本文引用: 1]
Design and performance evaluation of propeller for solar-powered high-altitude long-endurance unmanned aerial vehicle
1
2018
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
Design of high altitude propeller using multilevel optimization
1
2020
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
高空飞艇螺旋桨优化设计与气动性能车载试验
1
2017
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
高空飞艇螺旋桨优化设计与气动性能车载试验
1
2017
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
太阳能无人机高效螺旋桨气动设计
1
2020
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
太阳能无人机高效螺旋桨气动设计
1
2020
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
基于一种贝叶斯优化框架的高空螺旋桨气动优化设计
1
2023
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
基于一种贝叶斯优化框架的高空螺旋桨气动优化设计
1
2023
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
平流层飞艇动力推进系统的分析与设计
1
2015
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
平流层飞艇动力推进系统的分析与设计
1
2015
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
Electric propulsion modeling for conceptual air-craft design
1
2014
... 本文采用功率损失法对电动机进行建模.不同于等效电路法,功率损失法通过结合物理原理及工程经验来对电动机的损耗进行计算,在匹配货架电动机及新研电动机时均适用[20 ] .在功率损失法的建模过程中,电动机的效率η e 可由式(1) 计算得到: ...
1
2012
... 针对电动机损耗功率P L 的求解,Larminie和Lowry[21 ] 推导了式(2) 所示的多项式,完成了参数化电动机模型的搭建,从而获得电动机的总体参数. ...
超长航时太阳能无人机关键技术综述
1
2020
... 采用电推进动力形式的高空长航时无人机具有飞行高度高、续航时间长等优点,在执行长时间高空侦察监视、导航预警、空间攻防等任务中发挥着重要作用[1 -4 ] .高空长航时无人机的电推进系统主要由螺旋桨和电动机组成,与喷气式动力系统的飞发一体化相比,螺旋桨动力系统的耦合效应更为显著.因此,在无人机方案设计阶段及后期使用阶段,均须开展整机、螺旋桨、发动机三者之间的匹配优化设计,以实现无人机在整个飞行包线内具备最佳的动力特性及经济性,从而提升其在复杂环境下的生存能力. ...
超长航时太阳能无人机关键技术综述
1
2020
... 采用电推进动力形式的高空长航时无人机具有飞行高度高、续航时间长等优点,在执行长时间高空侦察监视、导航预警、空间攻防等任务中发挥着重要作用[1 -4 ] .高空长航时无人机的电推进系统主要由螺旋桨和电动机组成,与喷气式动力系统的飞发一体化相比,螺旋桨动力系统的耦合效应更为显著.因此,在无人机方案设计阶段及后期使用阶段,均须开展整机、螺旋桨、发动机三者之间的匹配优化设计,以实现无人机在整个飞行包线内具备最佳的动力特性及经济性,从而提升其在复杂环境下的生存能力. ...
高空超长航时太阳能无人机主要技术问题分析
0
2021
高空超长航时太阳能无人机主要技术问题分析
0
2021
1
2006
... 在明确了电动机的输出功率、转速、扭矩特性后,基于单点法开展螺旋桨总体参数设计,以确定螺旋桨的直径、效率、平面形状、转速及功率等,从而为螺旋桨的设计与选型提供参考.在单点法中,假设桨叶75%半径处的叶素升阻比可表征整个桨叶的升阻比.基于单点法确定定距螺旋桨的步骤如下:1)利用式(3) 至式(6) 依次计算不同桨叶直径下的螺旋桨功率系数C p 、桨叶效用因子A F 、前进比J 、阻升特性参数L 0 ;2)考虑高空螺旋桨在不同高度下(宽工况)的使用,设定初始升力系数为0.7,并根据图4 所示的螺旋桨阻升特性曲线获得相应的叶素安装角;3)获得叶素安装角后,利用式(7) 进一步计算螺旋桨的叶素阻升角γ ;4)在确定了螺旋桨的几何参数后,结合叶素理论[22 -23 ] ,利用式(8) 和式(9) 分别计算螺旋桨的拉力F p 及效率η p 等气动特性参数. ...
1
2006
... 在明确了电动机的输出功率、转速、扭矩特性后,基于单点法开展螺旋桨总体参数设计,以确定螺旋桨的直径、效率、平面形状、转速及功率等,从而为螺旋桨的设计与选型提供参考.在单点法中,假设桨叶75%半径处的叶素升阻比可表征整个桨叶的升阻比.基于单点法确定定距螺旋桨的步骤如下:1)利用式(3) 至式(6) 依次计算不同桨叶直径下的螺旋桨功率系数C p 、桨叶效用因子A F 、前进比J 、阻升特性参数L 0 ;2)考虑高空螺旋桨在不同高度下(宽工况)的使用,设定初始升力系数为0.7,并根据图4 所示的螺旋桨阻升特性曲线获得相应的叶素安装角;3)获得叶素安装角后,利用式(7) 进一步计算螺旋桨的叶素阻升角γ ;4)在确定了螺旋桨的几何参数后,结合叶素理论[22 -23 ] ,利用式(8) 和式(9) 分别计算螺旋桨的拉力F p 及效率η p 等气动特性参数. ...
Vorticity confinement technique and blade element method for accurate propeller modelling
1
2022
... 在明确了电动机的输出功率、转速、扭矩特性后,基于单点法开展螺旋桨总体参数设计,以确定螺旋桨的直径、效率、平面形状、转速及功率等,从而为螺旋桨的设计与选型提供参考.在单点法中,假设桨叶75%半径处的叶素升阻比可表征整个桨叶的升阻比.基于单点法确定定距螺旋桨的步骤如下:1)利用式(3) 至式(6) 依次计算不同桨叶直径下的螺旋桨功率系数C p 、桨叶效用因子A F 、前进比J 、阻升特性参数L 0 ;2)考虑高空螺旋桨在不同高度下(宽工况)的使用,设定初始升力系数为0.7,并根据图4 所示的螺旋桨阻升特性曲线获得相应的叶素安装角;3)获得叶素安装角后,利用式(7) 进一步计算螺旋桨的叶素阻升角γ ;4)在确定了螺旋桨的几何参数后,结合叶素理论[22 -23 ] ,利用式(8) 和式(9) 分别计算螺旋桨的拉力F p 及效率η p 等气动特性参数. ...
基于BP神经网络的甲板运动预报与补偿技术
1
2024
... BP神经网络属于单向传播的多层前馈网络(误差负反馈),其拓扑结构如图10 所示,包含输入层、隐含层(可有多层)和输出层.性能优异的BP神经网络模型的确定是一个反复训练、不断调整参数的过程,包括确定各层神经元个数、隐含层层数、学习率、传递函数及训练算法等[24 ] .在正式优化螺旋桨参数前,先将基于螺旋桨总体参数设计模型求解得到的初始螺旋桨参数代入BP神经网络模型,以验证其训练与预测的准确性.BP神经网络模型的输入变量包括螺旋桨参数(桨叶直径、桨叶弦长、桨叶角)和飞行参数(飞行高度、飞行速度、需用推力)等6个参数,输出变量为螺旋桨转速、需用功率.为了防止过拟合/欠拟合现象,训练集与预测集按7∶3的比例划分,其中训练集为118组,预测集为50组.经过反复的敏感性分析,最终确定的BP神经网络模型具体为:输入层神经元个数为3,隐含层层数为2,隐含层神经元个数为5,输出层神经元个数为2;学习率设为0.1,传递函数选择正切Sigmoid函数,训练过程采用Levenberg-Marquardt算法,并结合梯度下降法加速、优化寻找局部最小值.如图11 所示,经过多次迭代训练后,BP神经网络模型的预测精度较高,对螺旋桨需用功率预测的相对误差在5%以下.此外,在实际预测中,该模型对螺旋桨转速的预测精度高于对需用功率的预测.由此说明,基于BP神经网络的代理模型可用于螺旋桨参数的优化,最终实现电推进系统的桨发匹配及效率提升. ...
Overview of propulsion systems for unmanned aerial vehicles
0
2022
高空长航时太阳能飞机研究进展与技术挑战
1
2023
... 采用电推进动力形式的高空长航时无人机具有飞行高度高、续航时间长等优点,在执行长时间高空侦察监视、导航预警、空间攻防等任务中发挥着重要作用[1 -4 ] .高空长航时无人机的电推进系统主要由螺旋桨和电动机组成,与喷气式动力系统的飞发一体化相比,螺旋桨动力系统的耦合效应更为显著.因此,在无人机方案设计阶段及后期使用阶段,均须开展整机、螺旋桨、发动机三者之间的匹配优化设计,以实现无人机在整个飞行包线内具备最佳的动力特性及经济性,从而提升其在复杂环境下的生存能力. ...
基于BP神经网络的甲板运动预报与补偿技术
1
2024
... BP神经网络属于单向传播的多层前馈网络(误差负反馈),其拓扑结构如图10 所示,包含输入层、隐含层(可有多层)和输出层.性能优异的BP神经网络模型的确定是一个反复训练、不断调整参数的过程,包括确定各层神经元个数、隐含层层数、学习率、传递函数及训练算法等[24 ] .在正式优化螺旋桨参数前,先将基于螺旋桨总体参数设计模型求解得到的初始螺旋桨参数代入BP神经网络模型,以验证其训练与预测的准确性.BP神经网络模型的输入变量包括螺旋桨参数(桨叶直径、桨叶弦长、桨叶角)和飞行参数(飞行高度、飞行速度、需用推力)等6个参数,输出变量为螺旋桨转速、需用功率.为了防止过拟合/欠拟合现象,训练集与预测集按7∶3的比例划分,其中训练集为118组,预测集为50组.经过反复的敏感性分析,最终确定的BP神经网络模型具体为:输入层神经元个数为3,隐含层层数为2,隐含层神经元个数为5,输出层神经元个数为2;学习率设为0.1,传递函数选择正切Sigmoid函数,训练过程采用Levenberg-Marquardt算法,并结合梯度下降法加速、优化寻找局部最小值.如图11 所示,经过多次迭代训练后,BP神经网络模型的预测精度较高,对螺旋桨需用功率预测的相对误差在5%以下.此外,在实际预测中,该模型对螺旋桨转速的预测精度高于对需用功率的预测.由此说明,基于BP神经网络的代理模型可用于螺旋桨参数的优化,最终实现电推进系统的桨发匹配及效率提升. ...
平流层飞艇螺旋桨设计参数对效率的影响
1
2011
... 在整个优化匹配过程中,保持螺旋桨直径、高度、桨叶数量及需用推力等参数不变,重点考察桨叶弦长分布对螺旋桨整体效率的影响,以确定螺旋桨参数的最优解.图12 所示为经代理模型优化匹配前后螺旋桨的桨叶弦长分布情况.从图12 中可以看出,新螺旋桨的桨叶弦长沿半径方向仍呈先增大后减小的变化趋势,但桨叶弦长整体上比旧螺旋桨大,桨叶弦长峰值较旧螺旋桨提前了10%,出现在18%的桨叶径向半径处.图13 所示为无人机以5°仰角爬升时螺旋桨效率的变化情况.由图13 可知,在维持电动机输出功率和效率基本不变的情况下,在整个爬升剖面上新螺旋桨的效率约提升了0.1,提升效果显著.这是因为增大桨叶弦长有效提高了雷诺数和升阻比,使得螺旋桨叶素效率随之提高[25 ] . ...
平流层飞艇螺旋桨设计参数对效率的影响
1
2011
... 在整个优化匹配过程中,保持螺旋桨直径、高度、桨叶数量及需用推力等参数不变,重点考察桨叶弦长分布对螺旋桨整体效率的影响,以确定螺旋桨参数的最优解.图12 所示为经代理模型优化匹配前后螺旋桨的桨叶弦长分布情况.从图12 中可以看出,新螺旋桨的桨叶弦长沿半径方向仍呈先增大后减小的变化趋势,但桨叶弦长整体上比旧螺旋桨大,桨叶弦长峰值较旧螺旋桨提前了10%,出现在18%的桨叶径向半径处.图13 所示为无人机以5°仰角爬升时螺旋桨效率的变化情况.由图13 可知,在维持电动机输出功率和效率基本不变的情况下,在整个爬升剖面上新螺旋桨的效率约提升了0.1,提升效果显著.这是因为增大桨叶弦长有效提高了雷诺数和升阻比,使得螺旋桨叶素效率随之提高[25 ] . ...
高空长航时太阳能飞机研究进展与技术挑战
1
2023
... 采用电推进动力形式的高空长航时无人机具有飞行高度高、续航时间长等优点,在执行长时间高空侦察监视、导航预警、空间攻防等任务中发挥着重要作用[1 -4 ] .高空长航时无人机的电推进系统主要由螺旋桨和电动机组成,与喷气式动力系统的飞发一体化相比,螺旋桨动力系统的耦合效应更为显著.因此,在无人机方案设计阶段及后期使用阶段,均须开展整机、螺旋桨、发动机三者之间的匹配优化设计,以实现无人机在整个飞行包线内具备最佳的动力特性及经济性,从而提升其在复杂环境下的生存能力. ...
无人机推进系统螺旋桨与发动机匹配实验研究
1
2016
... 目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] .史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%.由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论. ...
无人机推进系统螺旋桨与发动机匹配实验研究
1
2016
... 目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] .史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%.由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论. ...
中空长航时无人机恒速螺旋桨与发动机匹配研究
0
2020
中空长航时无人机恒速螺旋桨与发动机匹配研究
0
2020
无人机动力推进系统的选型与性能匹配分析
0
2022
无人机动力推进系统的选型与性能匹配分析
0
2022
某型通航飞机桨发匹配性能分析方法研究
1
2023
... 目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] .史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%.由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论. ...
某型通航飞机桨发匹配性能分析方法研究
1
2023
... 目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] .史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%.由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论. ...
涡轮螺旋桨动力飞机桨发匹配性能仿真研究
1
2019
... 目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] .史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%.由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论. ...
涡轮螺旋桨动力飞机桨发匹配性能仿真研究
1
2019
... 目前,螺旋桨飞机的桨发匹配设计研究涉及电动机的较少,大部分集中在活塞发动机或涡桨发动机上,且大多是从发动机特性曲线和螺旋桨驱动特性曲线出发,开展螺旋桨与发动机之间的设计点参数匹配量化分析评估[5 -8 ] .史永运等[9 ] 基于螺旋桨片条理论和航空发动机热力循环原理,分别建立了螺旋桨性能和涡轮发动机性能的仿真模型,并以螺旋桨效率与发动机油耗比值的最大值为优化目标,开展了巡航剖面桨发匹配优化设计,使得飞机的巡航航程提升了13%.由于电动机与发动机相比具有独特的功率特性和功耗特性,以及在高空、低雷诺数下螺旋桨设计的复杂性,因此必须着重考虑电动机与螺旋桨的自身特性,以继承和发展桨发匹配设计理论. ...
Optimisation and analysis of efficiency for contra-rotating propellers for high-altitude airships
1
2019
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
High altitude propeller design and analysis
1
2015
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
Aerodynamic optimization and analysis of low Reynolds number propeller with gurney flap for ultra-high-altitude unmanned aerial vehicle
1
2022
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
基于太阳能飞机应用的低雷诺数翼型研究
1
2017
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...
基于太阳能飞机应用的低雷诺数翼型研究
1
2017
... 然而,现阶段有关高空无人机电推进系统设计的研究主要集中在螺旋桨翼型优化方面,即通过改善螺旋桨的气动特性来提高其效率,这在一定程度上忽略了螺旋桨与电动机之间的匹配设计.例如:Tang等[10 ] 基于涡流升力线理论详细分析了螺旋桨弦长、直径、转速等参数对高空飞艇螺旋桨效率的影响规律,通过理论计算得到的螺旋桨效率、推力等与CFD(computational fluid dynamics,计算流体力学)模拟值较为一致.Morgado等[11 ] 、Yao等[12 ] 结合理论分析与风洞试验,开展了高空螺旋桨的几何外形优化及性能验证工作,最终所获螺旋桨的设计点效率可达0.8.刘晓春等[13 ] 以FX63-137翼型为基准翼型开展了折线型建模,获得了5种折线型翼型,并详细分析了基准翼型、折线型翼型在低雷诺数下的气动特性,验证了折线型翼型应用于高空太阳能飞机的可行性.Park等[14 ] 以EAV-3型太阳能飞机的螺旋桨为研究对象,建立了一种基于叶素-动量理论和最小诱导损耗理论的CFD模型,并通过风洞试验和实际飞行数据验证了所构建模型在高空螺旋桨外形设计及性能评估、优化中具有较好的实用性.Liu等[15 ] 采用多级优化策略,提出了一种改进型D'Angelo优化框架,并将其应用于高空飞艇螺旋桨的高效、轻量化设计,即通过获取不同的桨叶弦长与桨叶角组合来实现螺旋桨的效率最大化及质量最小化.焦俊等[16 ] 、李星辉等[17 ] 基于遗传算法建立了多目标优化模型,并以高空螺旋桨的扭矩角、桨叶弦长和升阻比为目标响应,开展了一系列翼型优化设计工作,提高了螺旋桨的气动性能.口启慧等[18 ] 基于贝叶斯优化框架,结合拉丁超立方抽样和遗传算法,建立了以高斯过程模型为主的高空螺旋桨气动性能优化方法,并通过对基础低雷诺数翼型的优化设计,使螺旋桨的设计点效率整体约提升了8%.刘新强等[19 ] 分别建立了平流层高空飞艇电动机、螺旋桨的数理模型,并基于推力—转速—扭矩特性曲线开展了飞艇动力推进系统桨发匹配仿真分析,但所获飞艇动力推进系统的效率较低,仅为0.558~0.593.然而,上述研究中所采用的螺旋桨、电动机模型较为简单,故所获得的推进效率较低,且大多未通过地面试验对电推进系统的性能进行测试,更未关注后期整机运行时匹配点效率的提升问题. ...


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}